Изобретение относится к судовождению, обеспечению безопасности плавания и расхождения с судами.
Известен способ представления судоводителю обобщенной информации для контроля и управления движением судна, заключающийся в том, что определяют курсы, скорости и пеленги встречных судов и дистанцию для каждого из встречных судов, при этом вычисляют реальные области чрезмерного сближения судов для индикации их на дисплее судоводителя, в котором для маневрирующего и каждого из встречных судов определяют отношения скоростей, заданных безопасных и текущих дистанций до встречных целей, разность курсов и элементы движения судов, по которым определяют путем анализа возможный вид и форму области чрезмерного сближения с каждым из встречных судов, а реальный вид и форму соответствующей области сближения определяют путем формирования информационных массивов координат точек границ области, инициируя ее на дисплее соответствующим цветом в виде геометрической фигуры, ограниченной непрерывными линиями, причем число информационных массивов выбирают соответствующим возможному числу упомянутых линий, при этом инициируют информацию о курсе и скорости встречного судна как вектор абсолютной скорости и формуляр цели, обеспечивая совпадение цвета и соответствующего номера цели, дистанцию сближения и запас времени для принятия решения определяют с помощью сформированных электронного визира (маркера) и подвижного круга дальности, а курс расхождения инициируют на дисплее в явном виде путем обработки информации, вырабатываемой судовыми РЛС кругового обзора, лагом и курсоуказателем, отличающийся тем, что определяют маневренные характеристики судов путем построения площадей, занимаемых судами при маневрировании, при этом определяют траекторию движения центра тяжести, носовой и кормовой оконечностей, рассчитывают вектор сноса судна течением за время циркуляции tц:  где VT - скорость течения, рассчитывают углы дрейфа для самых неблагоприятных условий, определяют вектор сноса судна ветром SB для каждого судна, посредством электронного маркера строят безопасные зоны движения судов, при этом текущие координаты судов являются центрами окружностей с радиусами безопасных зон движения судов, длина которых соответствует длине занимаемой площади при маневрировании судна влево и вправо, расстояние от маневрирующего судна до опасной зоны определяют путем построения метрики Хаусдорфа посредством графопостроителя в соответствии с выражением:
где VT - скорость течения, рассчитывают углы дрейфа для самых неблагоприятных условий, определяют вектор сноса судна ветром SB для каждого судна, посредством электронного маркера строят безопасные зоны движения судов, при этом текущие координаты судов являются центрами окружностей с радиусами безопасных зон движения судов, длина которых соответствует длине занимаемой площади при маневрировании судна влево и вправо, расстояние от маневрирующего судна до опасной зоны определяют путем построения метрики Хаусдорфа посредством графопостроителя в соответствии с выражением:  где R - расстояние между собственным судном и множеством точек изолинии А, ограничивающую опасную зону движения встречного судна, при построении площадей, занимаемых своим и встречным судном при одновременном маневрировании с построением опасных зон определяют меру близости между опасными зонами в соответствии с выражением: H(A,B)=min {r>0:A⊂B+R и B⊂A+R}, где А и В - линии, ограничивающие опасные зоны маневрирующего и встречного судна, соответственно, r - радиус опасной зоны. [1] (Патент РФ на изобретение № 2334996).
где R - расстояние между собственным судном и множеством точек изолинии А, ограничивающую опасную зону движения встречного судна, при построении площадей, занимаемых своим и встречным судном при одновременном маневрировании с построением опасных зон определяют меру близости между опасными зонами в соответствии с выражением: H(A,B)=min {r>0:A⊂B+R и B⊂A+R}, где А и В - линии, ограничивающие опасные зоны маневрирующего и встречного судна, соответственно, r - радиус опасной зоны. [1] (Патент РФ на изобретение № 2334996).
Способ обеспечивает построение площадей, занимаемых судном при повороте вправо и влево, что позволяет оценить возможность столкновения с рядом расположенными судами.
Недостатком данного технического решения является невозможность формирования реальных областей опасного сближения судов, позволяющих судоводителю определить безопасные области движения судна и исключить опасное сближение и столкновение с другими судами.
Известен способ распознавания опасного сближения двух маневрирующих судов, заключающийся в том, что измеряют координаты каждого судна и по ним оценивают текущие относительные координаты, относительные скорости и относительные ускорения судов, затем определяют направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, сравнивают их с текущим относительным курсом первого судна, вычисляют скорости сближения относительного курса первого судна с направлениями лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, и формулируют вывод о возможности опасного сближения двух маневрирующих судов, если эта скорость сближения положительна. [2] (Патент РФ на изобретение № 2309083).
Способ позволяет заблаговременно распознавать возможность опасного сближения двух судов как в случае их прямолинейного движения, так и в случае, если суда маневрируют.
Недостатком данного технического решения является невозможность формирования реальных областей опасного сближения судов, позволяющих судоводителю определить безопасные области движения судна и исключить опасное сближение и столкновение с другими судами.
Известен способ распознавания опасного сближения двух судов заключающийся в том, что измеряют координаты каждого судна и по ним оценивают текущие координаты и вектор скорости каждого судна, затем определяют точки наибольшего сближения двух судов, сравнивают минимальное расстояние между судами с допустимым расстоянием и формулируют вывод о судах, как о создающих или не создающих опасную ситуацию, при этом дополнительно вводят операцию оценивания вектора ускорения и среднеквадратичных ошибок погрешностей оценивания ускорения каждого судна, после этого с учетом вычисляемой величины отношения абсолютных значений оценок ускорений каждого из двух судов к соответствующим среднеквадратичным погрешностям их оценивания формулируют вывод о судах, как о создающих или не создающих опасную ситуацию. [3] (Патент РФ на изобретение № 2262466).
Данный способ позволяет уменьшить ошибки определения точек наибольшего сближения тех судов, чье движение не является прямолинейным и равномерным.
Недостатком данного технического решения является невозможность формирования реальных областей опасного сближения судов, позволяющих судоводителю определить безопасные области движения судна и исключить опасное сближение и столкновение с другими судами.
Наиболее близким по технической сущности к заявляемому является способ предоставления судоводителю обобщенной информации для контроля и управления движением судна, заключающийся в том, что определяют курсы, скорости и пеленги встречных судов, по которым выявляют реальные области чрезмерного сближения судов для индикации их на дисплее судоводителя, при этом для маневрирующего и каждого из встречных судов определяют отношения скоростей, заданных безопасных и текущих дистанций до встречных целей, разность курсов и элементы движения судов, по которым определяют путем топологического анализа возможный вид и форму области чрезмерного сближения с каждым из встречных судов, а реальный вид и форму соответствующей области чрезмерного сближения определяют путем формирования информационных массивов координат точек границ области, инициируя ее на дисплее маркером соответствующего цвета в виде геометрической фигуры, ограниченной плавными кривыми, причем число информационных массивов выбирают соответствующим возможному числу упомянутых кривых, при этом инициируют информацию о курсе и скорости встречного судна как вектор абсолютной скорости и формуляр цели, обеспечивая совпадением цвета соответствие номера цели, области чрезмерного сближения с судном, соответствующим указанному номеру, и формуляра цели, дистанцию сближения и запас времени для принятия решения определяют с помощью сформированных электронного визира и подвижного круга дальности, а курс расхождения инициируют на дисплее в явном виде. [4] (Патент РФ на изобретение № 2077450).
Способ обеспечивает предоставление судоводителю обобщенной информации для контроля и управления движением судна, в виде реальных областей чрезмерного (опасного) сближения судов для индикации их на дисплее судоводителя.
Недостатком данного технического решения является отсутствие способа формирования реальных областей опасного сближения судов, позволяющего сформировать реальные опасные области для движения судна (области чрезмерного сближения судов), отобразить их на индикаторах для предоставления судоводителю и исключить опасное сближение и столкновение с другими судами.
Таким образом, ни одно из известных технических решений не позволяет решать задачу информационного обеспечения судоводителя о надводной обстановке за счет формирования реальных областей опасного сближения судов и их отображения на экране АРМ судоводителя.
Задачей изобретения является информационное обеспечении судоводителя данными о надводной обстановке за счет формирования реальных областей опасного сближения судов.
Техническим результатом предлагаемого технического решения является создание способа, решающего задачу информационного обеспечения судоводителя данными о надводной обстановке путем формирования реальных областей опасного сближения судов и их отображения на экране АРМ судоводителя, что обеспечивает повышение качества информационного обеспечения судоводителя о надводной обстановке и качество управления судном, решает задачу безопасного расхождения с судами, повышает безопасность плавания.
В рамках настоящей заявки используемые термины и определения означают следующее.
Навигационные системы - системы, обеспечивающие определение направлений осей системы координат носителя, значений текущих координат носителя, путевого угла (истинного курса) и скорости носителя относительно грунта.
Координаты и параметры движения судна - координаты, курс, путевой угол и скорость судна относительно грунта (составляющие скорости по осям системы координат) в некоторой системе координат (географическая, прямоугольная, полярная).
Относительная скорость - это скорость объекта В в системе координат другого объекта А.
Треугольник скоростей судов
Треугольником скоростей называется треугольник, сторонами которого являются векторы скоростей двух маневрирующих относительно друг друга судов и вектор их относительной скорости, причем
где  - вектор скорости маневрирующего судна;
- вектор скорости маневрирующего судна;
 - вектор скорости объекта маневра;
- вектор скорости объекта маневра;
 - вектор относительной скорости.
- вектор относительной скорости.
Область опасного сближения
Область опасного сближения - область, ограниченная окружностью радиуса Rоп с центром в точке расположения судна.
Сектор опасных курсов
Сектором опасных курсов (СОК) называется сектор с началом в точке нахождения маневрирующего судна, при движении в котором (прямолинейном с постоянной скоростью) произойдет сближение с объектом маневра на опасную дистанцию.
Сектор относительных опасных курсов
Сектором относительных опасных курсов (СООК) цели, называется сектор, в котором находится вектор относительной скорости маневрирующего судна при его движении в секторе опасных курсов.
Начало сектора находится в точке, смещенной относительно точки нахождения маневрирующего судна по вектору скорости объекта маневра на величину  где Δt - время прогноза, ограниченный линиями, параллельными касательным, которые проводят из упрежденного на время Δt места цели к окружности радиусом Rоп опасного сближения с центром, находящимся в месте расположения маневрирующего судна.
где Δt - время прогноза, ограниченный линиями, параллельными касательным, которые проводят из упрежденного на время Δt места цели к окружности радиусом Rоп опасного сближения с центром, находящимся в месте расположения маневрирующего судна.
Относительная область опасного сближения судна
Относительная область опасного сближения - область, ограниченная окружностью радиуса Rоп с центром в точке, смещенной относительно точки расположения судна по вектору его скорости на величину  где Δt - время прогноза, а
где Δt - время прогноза, а  - вектор скорости судна.
- вектор скорости судна.
Относительные линии движения
Относительные линии движения это линии, проходящие через точку, центра сектора относительных опасных курсов и пересекающие относительную область опасного сближения объекта маневра.
Относительная скорость для относительной линии движения
Относительная скорость для относительной линии движения это относительная скорость  вдоль данной линии при движении объекта маневра со скоростью
вдоль данной линии при движении объекта маневра со скоростью  а маневрирующего судна со скоростью
а маневрирующего судна со скоростью  при котором направление вектора относительной скорости
при котором направление вектора относительной скорости  совпадает с направлением данной относительной линии движения.
совпадает с направлением данной относительной линии движения.
Информационный массив координат точек границ области
Информационный массив координат точек границ области это набор координат точек, через которые проходит граница области.
Поставленная задача решается, а требуемый технический результат достигается тем, что определяют координаты и параметры движения маневрирующего судна, определяют координаты и параметры движения объекта маневра, координаты и параметры движения маневрирующего судна от навигационной системы предают в информационно-управляющую систему (ИУС), в ИУС строят окружность позиций и область опасного сближения для своего судна, формируют область относительного опасного сближения объекта маневра, строят сектор относительных опасных курсов маневрирующего судна, в данном секторе формируют линии относительного движения, пересекающие область относительного опасного сближения объекта маневра, и соответствующие им вектора относительного перемещения, для каждой линии определяют координаты точек входа и выхода линии относительного движения из области относительного опасного сближения объекта маневра, рассчитывают относительное время входа и выхода маневрирующего судна из области относительного опасного сближения объекта маневра, смещают точки входа и выхода линий относительного движения по направлению вектора перемещения объекта маневра на расстояние, равное произведению вектора перемещения объекта маневра на относительное время входа и выхода маневрирующего судна из относительной области опасного сближения объекта маневра соответственно, формируют сектора опасных курсов маневрирующего судна, а в них реальные области опасного сближения, для чего соединяют соседние смещенные точки в каждом из секторов опасных курсов в замкнутую линию, полученная реальная область опасного сближения судов отображается на экране автоматизированного рабочего места (АРМ) судоводителя и показывает область, движение в которую приводит к опасному сближению с объектом маневра.
Соседние точки соединяют ломаной линией, состоящей из отрезков прямых, соединяющих каждые две соседние точки области опасного сближения, либо плавной замкнутой линией.
Источники целевой информации на судне измеряют координаты, вырабатывают параметры движения целей и формируют их формуляры.
Навигационная система маневрирующего судна вырабатывает его координаты и параметры движения.
Цель - любой объект (судно, корабль и пр.), обнаруженные источниками целевой информации маневрирующего судна.
Объект маневра - цель, для которой решается задача расхождения.
Формуляры цели от источника целевой информации, располагаемого на маневрирующем судне, передаются в информационно-управляющую систему (ИУС). Формуляр цели от каждого источника содержит набор измеренных и выработанных параметров цели (координат и параметров движения, например, пеленг, дальность, угол места или координаты в прямоугольной системе координат, составляющие скорости цели, например, радиальная, горизонтальная, вертикальная, полная скорость или составляющие вектора скорости по осям прямоугольной системы координат).
Формуляры с координатами и параметрами движения маневрирующего судна от навигационной системы передаются в ИУС.
В ИУС по данным о координатах и параметрах движения маневрирующего судна и объекта маневра строят окружность позиций и область опасного сближения для своего судна, формируют область относительного опасного сближения объекта маневра, строят сектор относительных опасных курсов маневрирующего судна, в данном секторе формируют линии относительного движения маневрирующего судна, пересекающие область относительного опасного сближения объекта маневра, и соответствующие им вектора относительного перемещения, для каждой линии определяют координаты точек входа и выхода каждой линии относительного движения из области относительного опасного сближения объекта маневра, рассчитывают относительное время входа и выхода маневрирующего судна из области относительного опасного сближения объекта маневра, смещают точки входа и выхода линий относительного движения по направлению вектора перемещения (скорости) объекта маневра на расстояние, равное произведению вектора перемещения объекта маневра на относительное время входа и выхода маневрирующего судна из относительной области опасного сближения объекта маневра соответственно, формируют сектора опасных курсов маневрирующего судна, а в них реальные области опасного сближения, для чего соединяют соседние смещенные точки в каждом из секторов опасных курсов в замкнутую линию.
Соседние точки соединяют ломаной линией, состоящей из отрезков прямых, соединяющих каждые две соседние точки области опасного сближения, либо плавной замкнутой линией.
Сформированная реальная область опасного сближения судов отображается на индикаторе АРМ судоводителя, предоставляя ему информации об областях, движение в которые ведет к опасному сближению.
Сущность изобретения иллюстрируется чертежами, на которых изображено
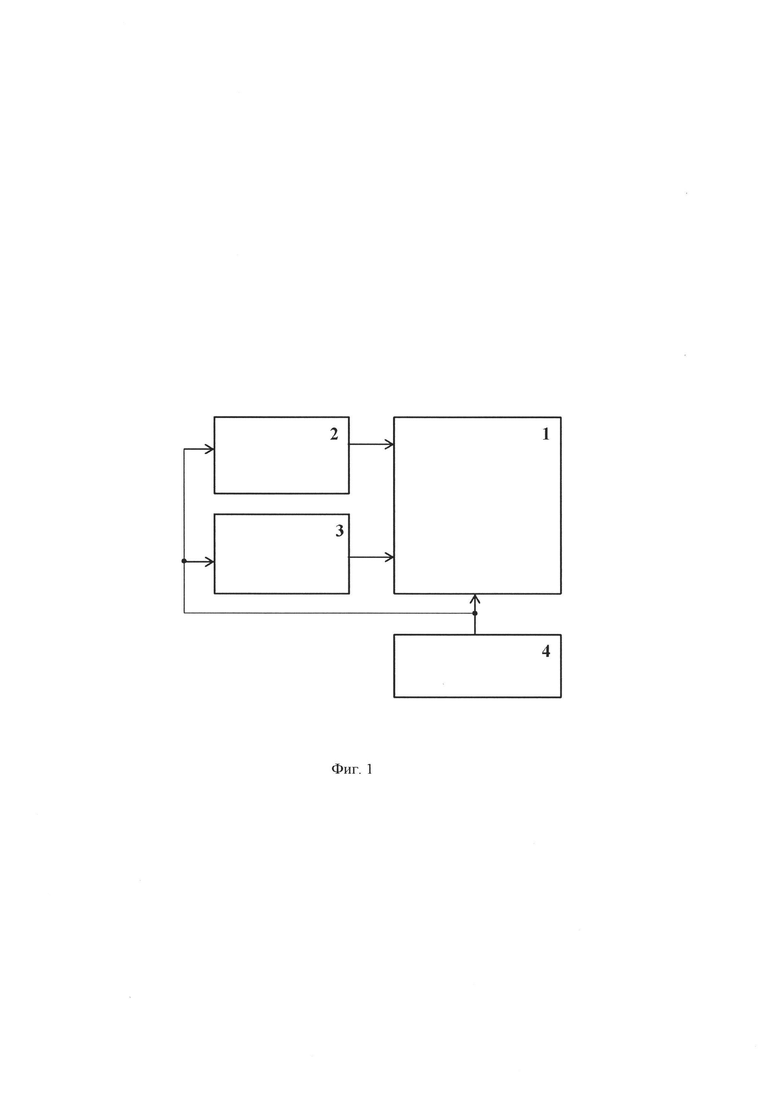
- на фиг. 1 - структурная схема системы, обеспечивающей реализацию предлагаемого способа;
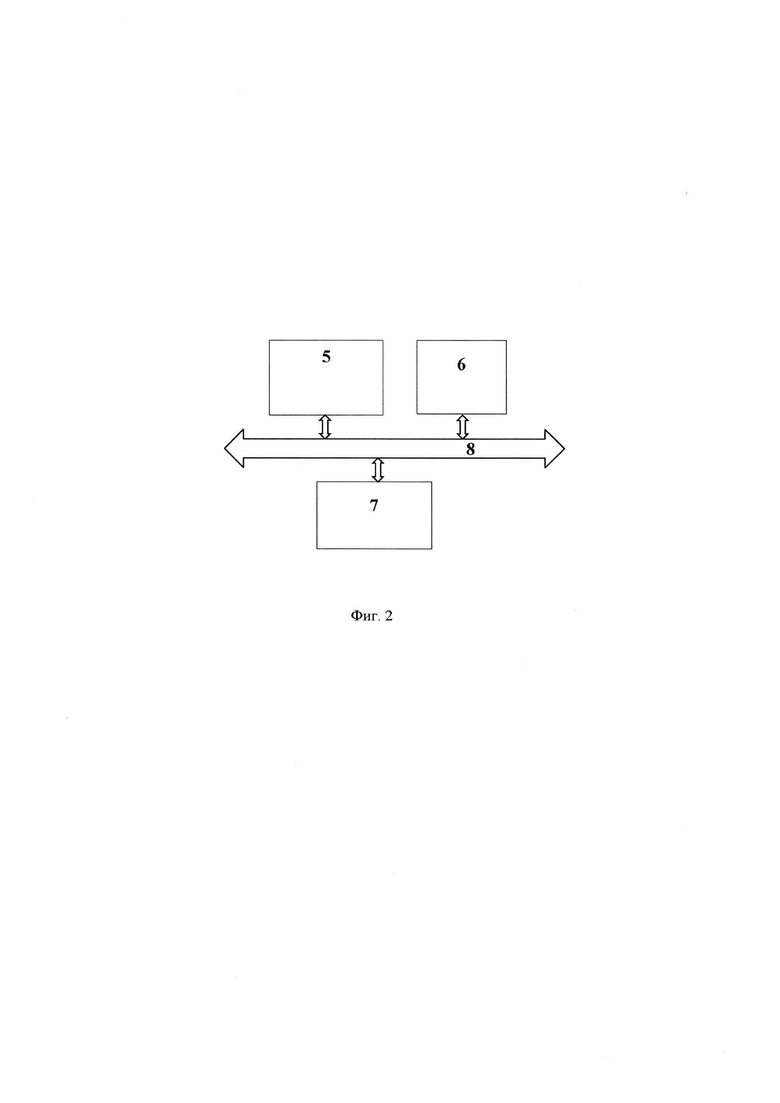
- на фиг. 2 - структурная схема информационно-управляющей системы;
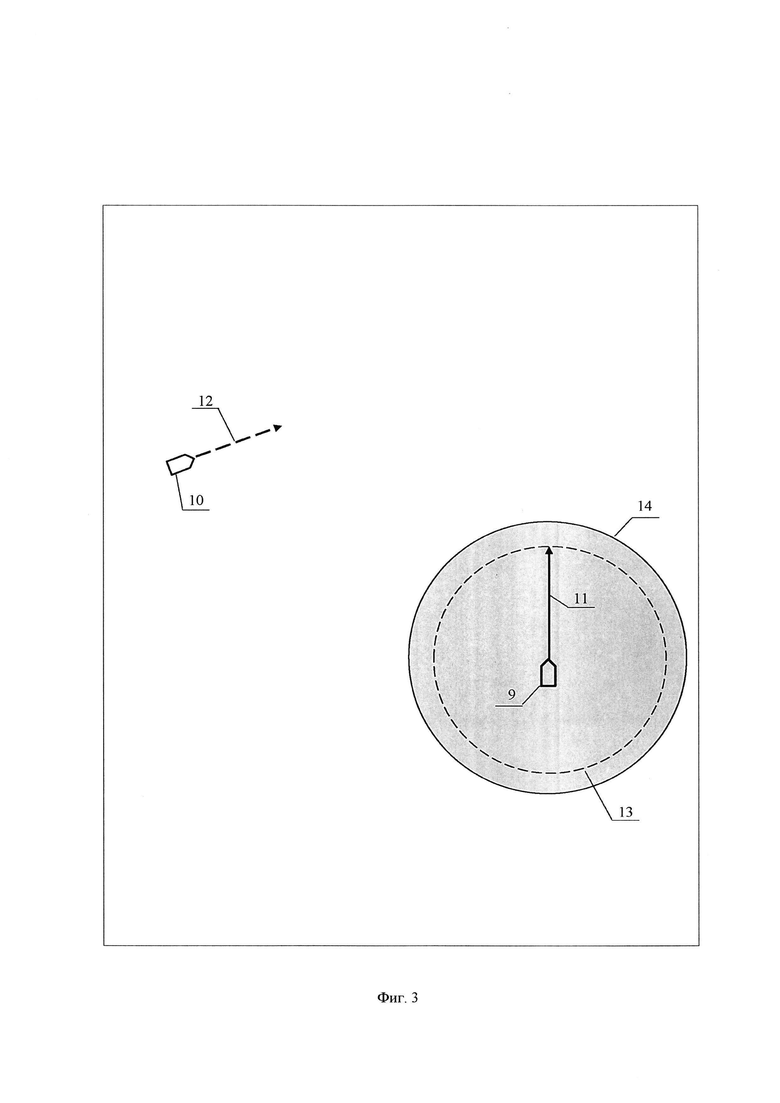
- на фиг. 3 - построение области опасного сближения маневрирующего судна и окружности позиций маневрирующего судна;
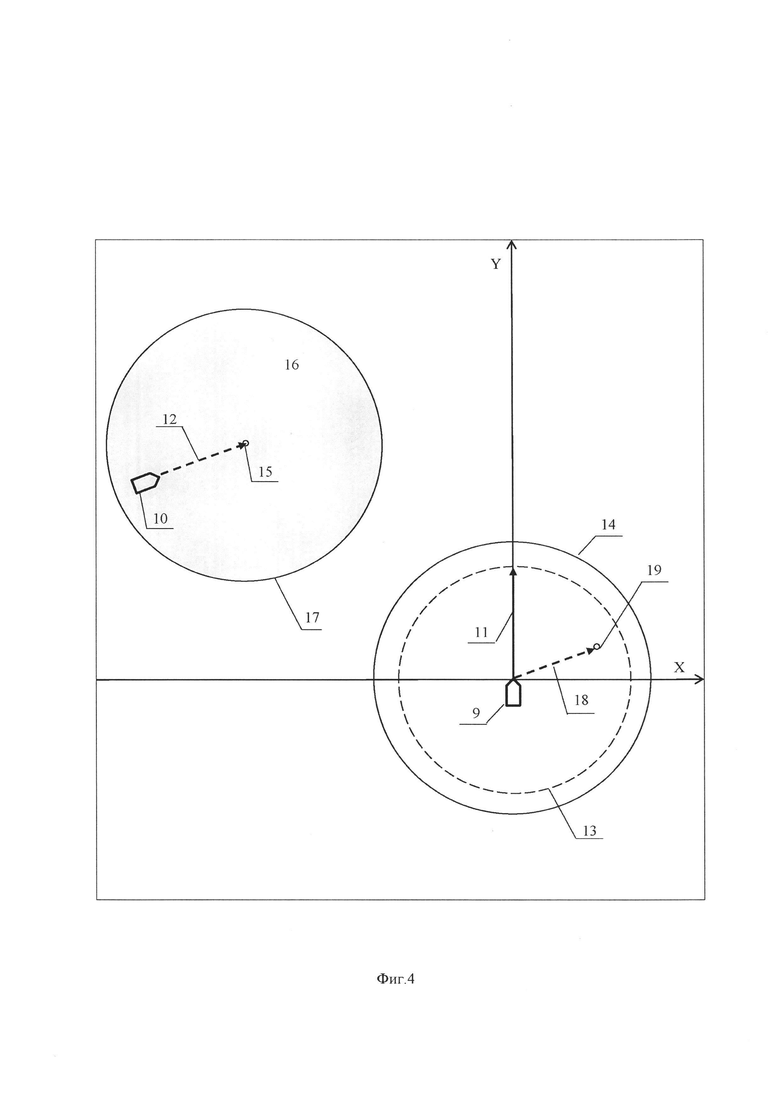
- на фиг. 4 - формирование относительной области опасного сближения объекта маневра;
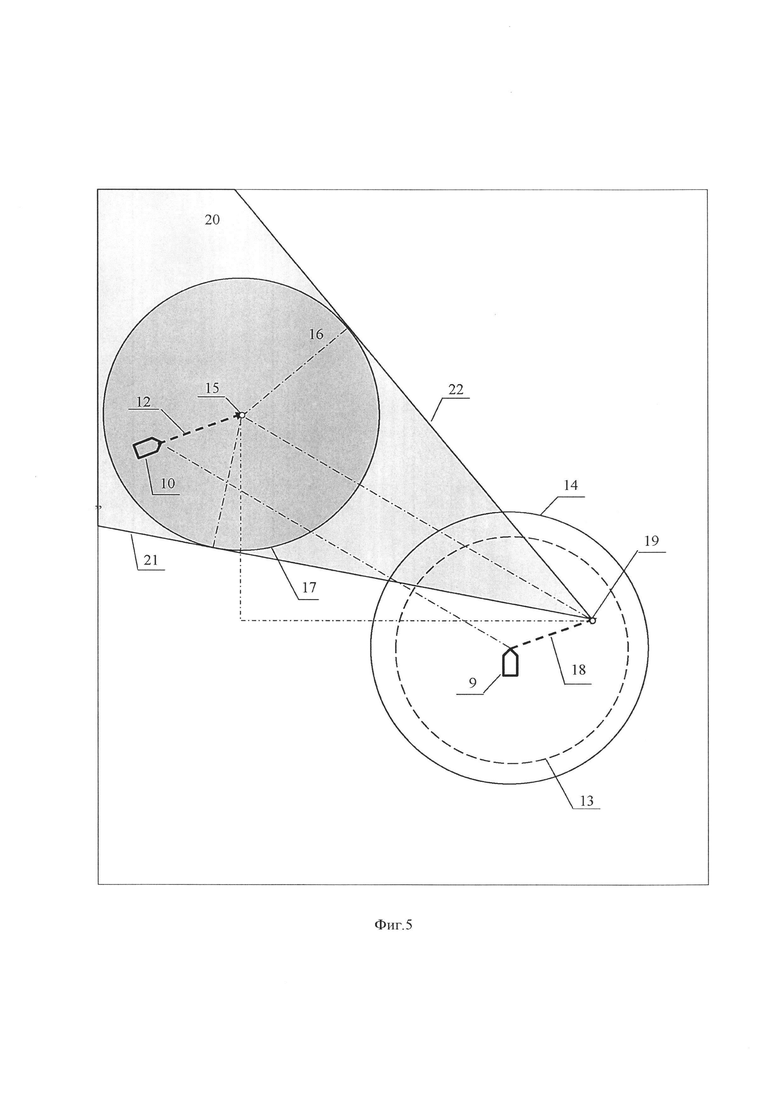
- на фиг. 5 - построение сектора относительных опасных курсов для объекта маневра;
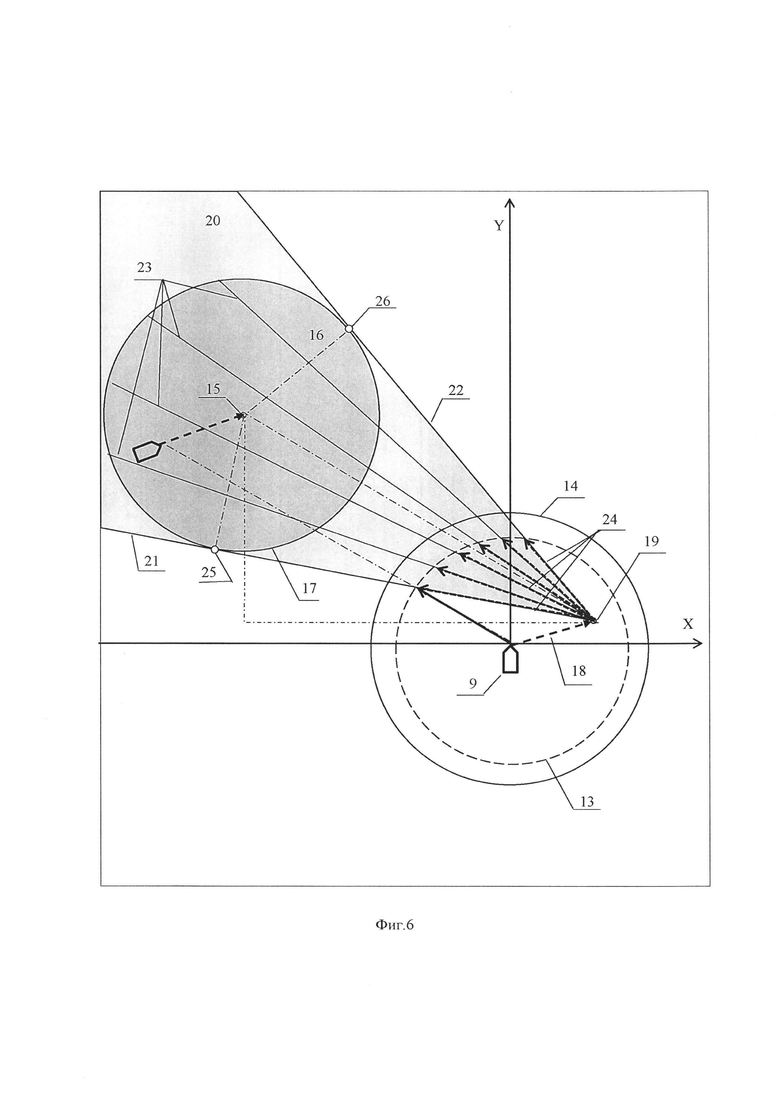
- на фиг. 6 - формирование линий относительного движения, пересекающих относительную область опасного сближения объекта маневра, и определение вектора относительной скорости для каждой линии;
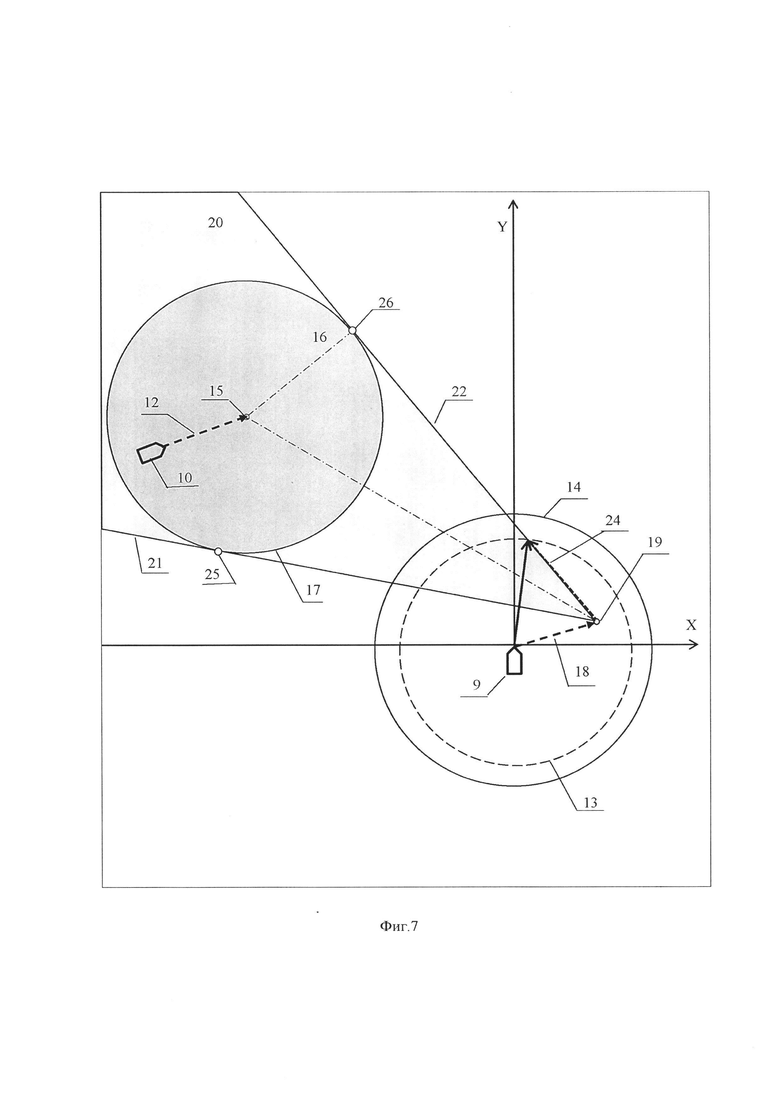
- на фиг. 7 - формирование линии относительного движения, касающейся относительной области опасного сближения объекта маневра, и определение вектора относительной скорости для данной линии;
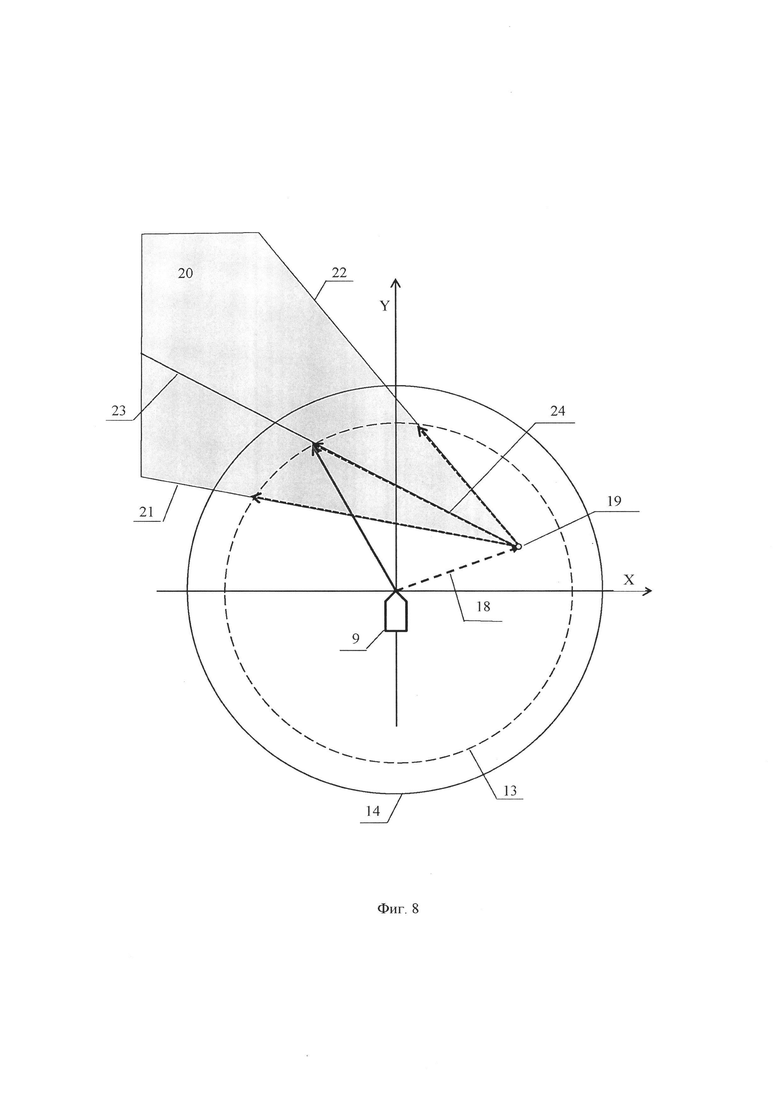
- на фиг. 8 - формирование линии относительного движения, пересекающей относительную область опасного сближения объекта маневра, и определение вектора относительной скорости для данной линии;
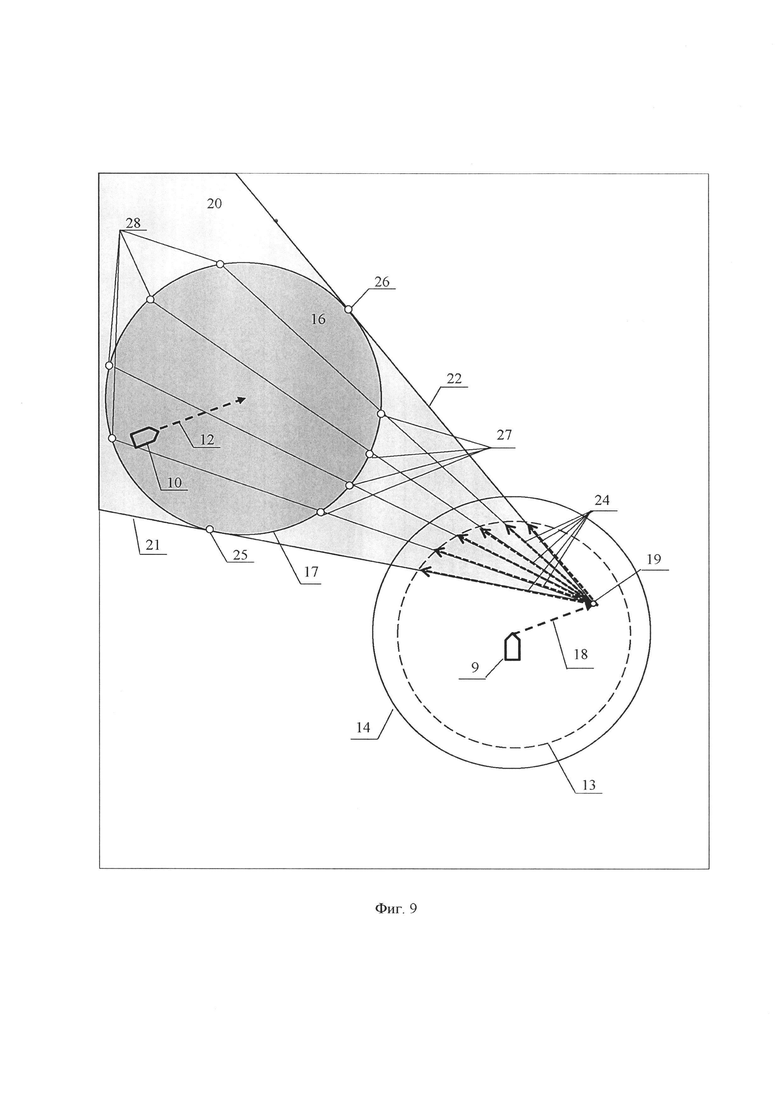
- на фиг. 9 - формирование точек пересечения линий относительного движения с окружностью, ограничивающей область относительного опасного сближения объекта маневра;
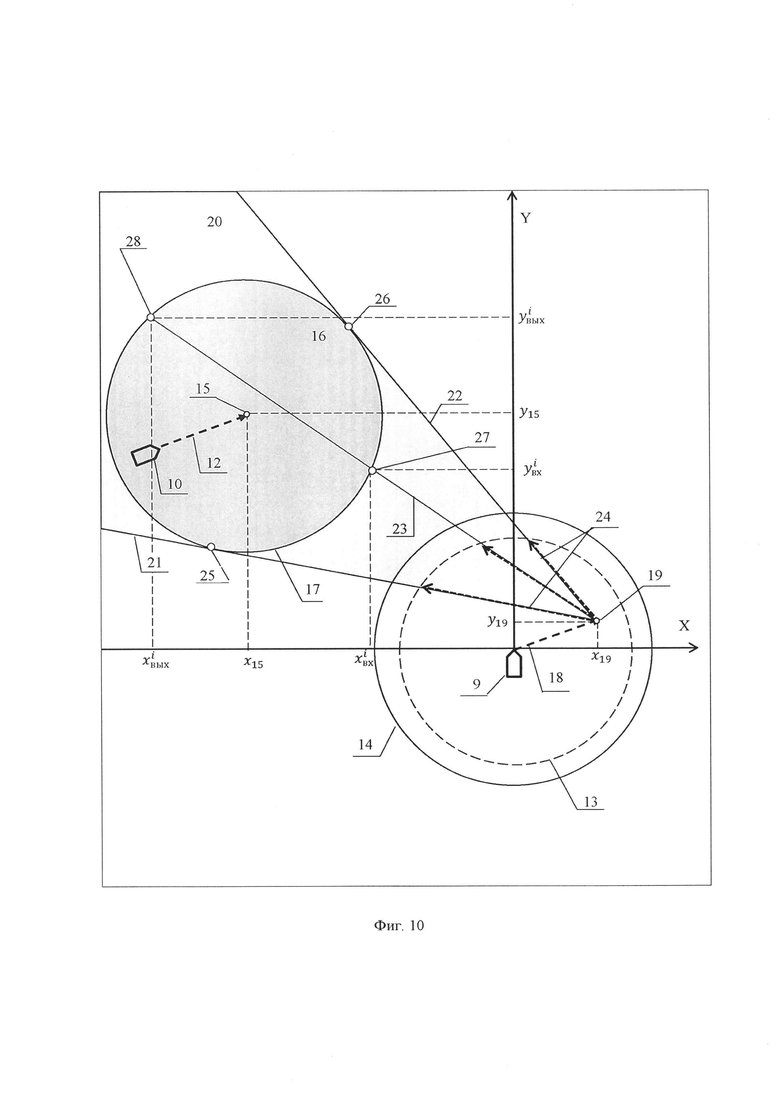
- на фиг. 10 - определение координат точек пересечения линии относительного движения с окружностью, ограничивающей область относительного опасного сближения объекта маневра;
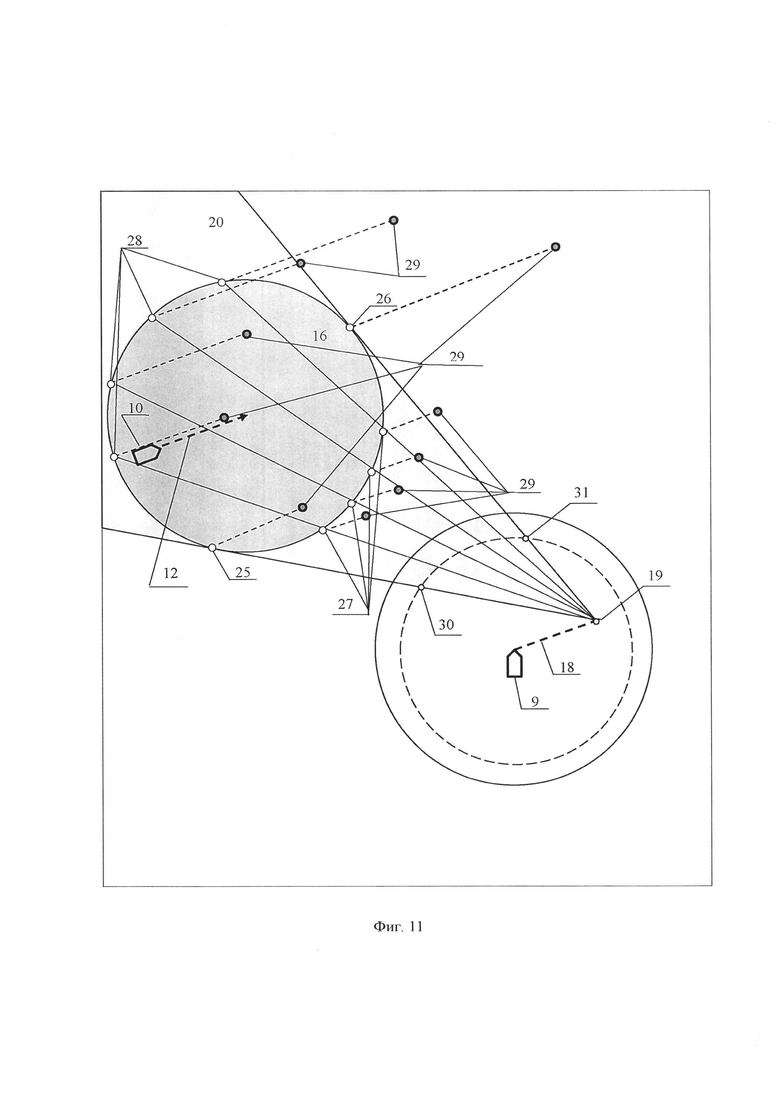
- на фиг. 11 - смещение точек входа и выхода линий относительного движения по вектору скорости объекта маневра;
- на фиг. 12 - формирование сектора опасных курсов маневрирующего судна;
- на фиг. 13 - формирование реальной области опасного сближения судов;
- на фиг. 14 - отображение реальной области опасного сближения судов на экране АРМ судоводителя;
- на фиг. 15 - формирование реальных областей опасного сближения судов при скорости объекта маневра, большей скорости маневрирующего судна.
Примечание: Рисунки на фиг. 3-15 соответствуют изображению на экране обстановки АРМ судоводителя, ограниченному границами экрана.
Способ может быть реализован с помощью системы, представленной на фиг. 1 Система, реализующая предложенный способ формирования областей опасного сближения судов (Фиг. 1), включает: информационно-управляющую систему 1, источник целевой информации о надводной обстановке 2, навигационную систему 3, систему единого времени 4.
Источник целевой информации о надводной обстановке 2, навигационная система 3 и система единого времени 4 соединены с информационно-управляющей системой 1, система единого времени соединена 4 с источником целевой информации о надводной обстановке 2 и навигационной системой 3.
Информационно-управляющая система (фиг. 2) включает устройство сопряжения 5, автоматизированное рабочее место (АРМ) судоводителя (оператора) 6, вычислитель 7, сеть обмена данными 8.
Система единого времени в ИУС 1 соединена со всеми вычислителями для обеспечения их синхронизации с единым временем.
Источник целевой информации о надводной обстановке 2 в ИУС 1 соединен с устройством сопряжения 5.
Навигационная система 3 в ИУС 1 соединена с устройством сопряжения 5.
При этом ИУС выполнена с возможностью:
- приема информации о координатах и параметрах движения надводных целей от источника целевой информации о надводной обстановке;
- приема информации о координатах и параметрах движения маневрирующего судна от навигационной системы;
- проведения вычислений;
- отображения графических объектов на индикаторе АРМ. Это обеспечивает реализацию предложенного способа.
В качестве навигационной системы может использоваться:
- инерциальная навигационная система любого типа, например, инерциальная навигационная система «Ладога-М» и ее модификации (см., например, [5]);
- система приемоиндикаторов спутниковой навигационной системы ГЛОНАС/GPS [6, 7], например, типа «Фарватер РК-2106, РК-2006», «Tranzas Т-701», «Samyung SPR-1400, SGN-500», «JRS JLR-7800, JLR-7500», «Furuno GP-37, GP-150».
Источник целевой информации о надводной обстановке может представлять собой навигационную радиолокационную станцию [8, 9], например, НРЛС МР-212/201-1, МР-231, МР-231-3 и другие.
В качестве системы единого времени 4 может использоваться система «Гном-2» [10] или система группы компаний «Экра» [11].
В составе информационно-управляющей системы 1 устройство сопряжения 5 и вычислитель 6 могут выполняться в виде стандартного компьютера любого типа, например:
- промышленные компьютеры фирмы Advantech [12];
- промышленные компьютеры фирмы Fastwel [13].
Автоматизированное рабочее место (пульт) оператора может представлять собой комплекс, включающий один или несколько вычислителей, средства отображения в виде мониторов и органы управления (клавиатура, трекбол, сенсорный экран). Примером может являться автоматизированное рабочее место оператора, выпускаемое отечественными предприятиями, например, АРМ оператора боевой информационно-управляющей системы «Требование-М» [14, 15, 16, 17] или «Сигма-Э» [14, 18].
Примером реализации системы может являться оборудование корабля [19], включающее:
- набор источников целевой информации о надводной обстановке в виде навигационных радиолокационных станций типа МР-212/201-1, Manta 2300 A/3/SU, МР-231,МР-231-3;
- боевую информационно-управляющую систему «Требование-М», включающую устройства (приборы) сопряжения, вычислители, автоматизированные рабочие места оператора, сеть обмена данными;
- навигационную систему типа «Ладога-М»;
- приемоиндикаторы спутниковых навигационных систем ГЛОНАС/GPS «АКВА-БОРТ-12/Р3007.
Функционирование системы (фиг. 1) для реализации способа осуществляется следующим образом.
Система единого времени 4 обеспечивает выдачу во все вычислители ИУС 1 данных текущего времени для обеспечения их синхронизации с единым временем.
Навигационная система 3 судна осуществляет формирование значений координат, курса и скорости маневрирующего судна и обеспечивает их выдачу в информационно-управляющую систему 1.
Источник целевой информации о надводной обстановке 2 осуществляет обзор пространства, обнаружение и сопровождение надводных целей. При этом он вырабатывает координаты и параметры движения сопровождаемых целей и выдает их в информационно-управляющую систему 1.
Формуляры целей от источника целевой информации 2, содержащие координаты и параметры движения целей, а также единое время их формирования, в информационно-управляющей системе 1 поступают (фиг. 2) в устройство сопряжения 5, где принимаются, обрабатываются и передаются в вычислитель 7 и АРМ 6. При поступлении каждого целевого формуляра от источника целевой информации устройство сопряжения 5 формирует из него стандартный формуляр внутреннего формата, включающий координаты и параметры движения цели в полярных, прямоугольных и географических координатах, а также время формирования данных.
Пересчет координат цели из полярных координат в прямоугольные, для системы координат, представленной на фиг. 4, производится в соответствии со следующими соотношениями:
где ε - угол места цели (для надводных объектов ε=0), φ - пеленг цели.
Пересчет координат и параметров движения цели из прямоугольных координат в полярные производится в соответствии со следующими соотношениями:
где D - дальность, ε - угол места (для надводных объектов ε=0), V - скорость, K - курс, П - пеленг, x=Хц, y=Yц, z=Zц, (для надводных объектов Zц=0).
Пересчет координат цели из геодезической системы координат в полярную может быть выполнен с использованием известного метода Бесселя [20] для обратной геодезической задачи (см. § 28, с. 133-142).
Выполнение расчетов и построение графических фигур осуществляется в прямоугольной системе координат с центром в точке расположения маневрирующего судна 9, координаты которой формируются навигационной системой 3 (ось Y - север, X - восток).
При необходимости (большом расстоянии между навигационной системой 3 и источником целевой информации 2) координаты целей пересчитываются в систему координат маневрирующего судна с учетом отстояния центра системы координат источника целевой информации 2 от центра системы координат навигационной системы 3.
Вычислитель 7 (фиг. 2) принимает стандартные формуляры целей, сохраняет их и при каждом поступлении формуляра производит формирование реальных областей опасного сближения судов в следующем порядке.
1. Строят окружность позиций и область опасного сближения для маневрирующего судна
Построение иллюстрируется фиг. 3, на которой изображены маневрирующее судно 9, объект маневра 10, вектор перемещения маневрирующего судна 11, вектор перемещения объекта маневра 12.
Определение координат xi, yi точек окружности радиуса R осуществляется соответствии со следующими соотношениями:

где Pi - пеленг i-й точки, хс, ус - координаты центра окружности.
1.1 Строят (фиг. 3) окружность 13 позиций маневрирующего судна радиуса R=Vм×Δt с центром в точке расположения маневрирующего судна 9 с координатами, выдаваемыми навигационной системой 3, где Vм - скорость маневрирующего судна, выдаваемая навигационной системой, Δt - время прогноза положения судов.
Примечание: значение Δt выбирается оператором с учетом скорости судна, рекомендуемый диапазон - несколько минут.
Координаты точек окружности определяются на основе соотношений (3) при хс=х9=0, ус=у9=0.

где Pi - пеленг точки.
1.2. Формируют область 14 опасного сближения судов для маневрирующего судна 9, ограниченную окружностью радиуса Rоп (фиг. 3) с центром в точке расположения маневрирующего судна, координаты которой выдаются навигационной системой 3 (фиг. 3). Координаты точек окружности определяются на основе соотношений (3) при хс=х9=0, ус=у9=0.

где Pi - пеленг точки.
2. Формируют область относительного опасного сближения объекта маневра Формирование области иллюстрируется фиг. 4, на которой изображены маневрирующее судно 9, объект маневра 10, вектор перемещения объекта маневра 12, окружность 13 позиций маневрирующего судна, окружность 14, ограничивающая область опасного сближения маневрирующего судна, точка 15 окончания вектора перемещения 12 объекта маневра, область 16 относительного опасного сближения судов для объекта маневра, окружностью 17 радиуса Rоп с центром в точке 15 окончания вектора 12 перемещения объекта маневра, ограничивающая область 16, вектор 18 перемещения объекта маневра 10, точка 19 окончания вектора перемещения 18. Формирование области осуществляется следующим образом.
2.1. Определяют координаты точки 15 окончания вектора перемещения 12 объекта маневра (Фиг. 4).
Определение координат точки 15 осуществляется следующим образом:
- по данным источника целевой информации о надводной обстановке включающим пеленг Рк и дальность Dк до объекта маневра, его путевой угол Кк (истинный курс) и скорость Vк определяют координаты местоположения объекта маневра:

- определяют координаты точки 15:

2.2. Формируют область 16 относительного опасного сближения судов для объекта маневра, ограниченную окружностью 17 радиуса Rоп (фиг. 4) с центром в точке 15 окончания вектора 12 перемещения объекта маневра.
Формирование осуществляется в соответствии с (3) путем определения координат точек окружности радиуса Rоп с центром в точке 15 с координатами хс=х15у, ус=у15:

где Pi - пеленг i-й точки окружности 17 из точки 15.
3. Строят сектор относительных опасных курсов для маневрирующего судна
Построение иллюстрируется фиг. 5, на которой дополнительно изображены точка 15 окончания вектора перемещения 12, область 16 относительного опасного сближения судов, окружность 17 радиуса Rоп, ограничивающая область 16, вектор 18 перемещения объекта маневра 10, точка 19 окончания вектора перемещения 18, точка 19 окончания вектора перемещения 18, сектор 20 относительных опасных курсов, касательные 21 и 22 к окружности 17.
3.1. Строят вектор 18 перемещения объекта маневра 10 длиной Vк×Δt, с началом в точке расположения маневрирующего судна 9, где Vк - скорость объекта маневра, выдаваемая источником целевой информации о надводной обстановке (фиг. 5), Δt - время прогноза.
3.2. Определяют координаты точки 19 окончания вектора перемещения 18 (фиг. 5):

3.3. Определяют пеленг  на точку 15 из точки 19 окончания вектора перемещения 18:
на точку 15 из точки 19 окончания вектора перемещения 18:

3.4. Определяют расстояние  от точки 19 до точки 15
от точки 19 до точки 15

3.5. Строят сектор 20 относительных опасных курсов путем формирования двух касательных 21 и 22 из точки 19 окончания вектора перемещения 18 к окружности 17 (области 16 относительного опасного сближения), ограничивающих данный сектор (Фиг. 5). Касательные 21 и 22 описываются уравнением
где х21, у21 координаты точки на линии 21;
х22, у22 координаты точки на линии 22.
3.6. Определяют угол ф между линией 21 и линией, проходящей через точки 15 и 19:

3.7. Определяют относительный пеленг для касательных 21 и 22, задающих границы сектора относительных опасных курсов:

4. В построенном секторе относительных опасных курсов формируют линии относительного движения 23, пересекающие область относительного опасного сближения объекта маневра, и соответствующие им вектора относительного перемещения 24.
Построение иллюстрируется:
- фиг. 6, на которой дополнительно изображены линии относительного движения 23 и вектора 24 относительного перемещения для каждой линии, точки 25 и 26 касания линиями 21 и 22 окружности 17, а также треугольник векторов относительного перемещения (скоростей) для линии 21;
- фиг. 7, на которой дополнительно изображен треугольник векторов относительного перемещения для линии относительного движения 22;
- фиг. 8, на которой изображен треугольник векторов относительного перемещения (скоростей) для линии относительного движения 23;
Началом векторов относительного перемещения 24 и линий относительного движения 23 является точка 19 окончания вектора 18 относительного перемещения объекта маневра, отложенного от места расположения маневрирующего судна, а окончанием вектора относительного перемещения 24 является точка пересечения с окружностью 13.
4.1. Вектор относительного перемещения 24 для соответствующей линии относительного движения 21 определяется следующим образом (фиг. 6):
Определяют углы треугольника векторов относительных перемещений (скоростей):

где  - угол, лежащий напротив вектора Vк×Δt относительного перемещения 18 объекта маневра;
- угол, лежащий напротив вектора Vк×Δt относительного перемещения 18 объекта маневра;
 - угол, лежащий напротив вектора Vм×Δt относительного перемещения маневрирующего судна;
- угол, лежащий напротив вектора Vм×Δt относительного перемещения маневрирующего судна;
 - угол, лежащий напротив вектора 24 относительного перемещения Vp×Δt для линии 21 относительного движения;
- угол, лежащий напротив вектора 24 относительного перемещения Vp×Δt для линии 21 относительного движения;
Определяют вектор относительного перемещения для линии 21:
или

4.2. Вектор  относительного перемещения 24 для соответствующей линии относительного движения 22 определяется следующим образом (фиг. 7):
относительного перемещения 24 для соответствующей линии относительного движения 22 определяется следующим образом (фиг. 7):
Находят точку пересечения линии 22 с окружностью 13, которое имеет место при выполнении условия:

С учетом (13):

где х - координата точки на линии относительного движения 22;


где
Откуда

В качестве точки  выбирают точку с координатами х, у более близкую к точке 26.
выбирают точку с координатами х, у более близкую к точке 26.
При этом относительный курс маневрирующего судна

а 
где  - найденные координаты точки пересечения линии 22 с окружностью 13.
- найденные координаты точки пересечения линии 22 с окружностью 13.
4.3 Вектор  относительного перемещения 24 для соответствующей i-й линии 23 относительного движения определяют следующим образом (фиг. 8):
относительного перемещения 24 для соответствующей i-й линии 23 относительного движения определяют следующим образом (фиг. 8):
Задают направление вектора  скорости маневрирующего судна
скорости маневрирующего судна 
где 
ΔKi - сдвиг по углу вектора скорости маневрирующего судна для i-й линии относительного движения 23:

где Δ - шаг по углу между векторами скорости маневрирующего, может использоваться как постоянный шаг, так и переменный.
Определяют величину вектора  относительного перемещения 24 для соответствующей линии относительного движения 23 в следующем порядке.
относительного перемещения 24 для соответствующей линии относительного движения 23 в следующем порядке.
Находят точку пересечения линии 23 с окружностью 13, которое имеет место при выполнении условия:

Учитывая, что

из (28) получаем

где х - координата точки на линии относительного движения 23

где 

Откуда
В качестве точки  выбирают точку с координатами х, у более близкую к точке 15.
выбирают точку с координатами х, у более близкую к точке 15.

5. Определяют координаты точек входа и точек выхода каждой линии относительного движения из области опасного сближения объекта маневра.
Процесс иллюстрируется фиг. 9, 10, на которых дополнительно изображены точки входа 27 и выхода 28 линий относительного движения 23 в относительную область опасного сближения 16 объекта маневра 10.
Координаты точек 25 и 26 входа-выхода (касания) для линий 21 и 22 определены выше.
Для i-й линии 23 координаты точек входа и выхода определяются следующим образом.
Находят точки 27 и 28 пересечения линией 23 окружности 17:

где х23, y23 координаты точки на линии 23, окружности 17, которое имеет место при выполнении условия:

С учетом (30):


где
Откуда

где х, у - найденные координаты точек входа и выхода линии 23 с окружностью 13.
Определение какая из точек является точкой входа, а какая точкой выхода производится по их отстоянию от точки 19. Ближняя к точке 19 является точкой входа, а дальняя - точкой выхода.
В результате получаем координаты точки входа  и точки выхода
и точки выхода 
6. Для каждой линии относительного движения рассчитывают относительное время входа и выхода маневрирующего судна из области относительного опасного сближения объекта маневра
Процесс иллюстрируется фиг. 11, на которой дополнительно изображены точки 27 входа, 28 выхода для линий относительного движения 23 и точки 25 и 26 входа-выхода (касания) для линий относительного движения 21 и 22 соответственно.
6.1. Определяют расстояние от начала линии относительного движения до ближней (точки входа) Lбл и дальней (точки выхода) Lдл точек пересечения линией относительного движения окружности 17, ограничивающей область относительного опасного сближения 16 объекта маневра (фиг. 6).

Для линий 21 и 22

6.2. Рассчитывают относительное время входа и выхода маневрирующего судна из относительной области опасного сближения объекта маневра:


7. Смещают точки входа и выхода линий относительного движения из относительной области опасного сближения объекта маневра по направлению вектора перемещения (скорости) объекта маневра на расстояние, равное произведению вектора перемещения объекта маневра на относительное время входа и выхода маневрирующего судна из относительной области опасного сближения объекта маневра соответственно.
Процесс смещения иллюстрируется фиг. 11, на которой дополнительно изображены точки 29, получаемые в результате смещения точек 25 и 26 входа-выхода (касания) для линий 21 и 22 относительного движения, а также точек 27 входа и 28 выхода для линий относительного движения 23.
7.1. Вычисляют величину смещения Lсм для каждой точки 25, 26 и 27:

7.2. Из соответствующей точки 25, 26, 27 откладывают отрезок соответствующей длины Lсм, параллельный вектору Vм×Δt перемещения (скорости) объекта маневра (фиг. 7).
Конец отрезка определяет смещенное положение точки.
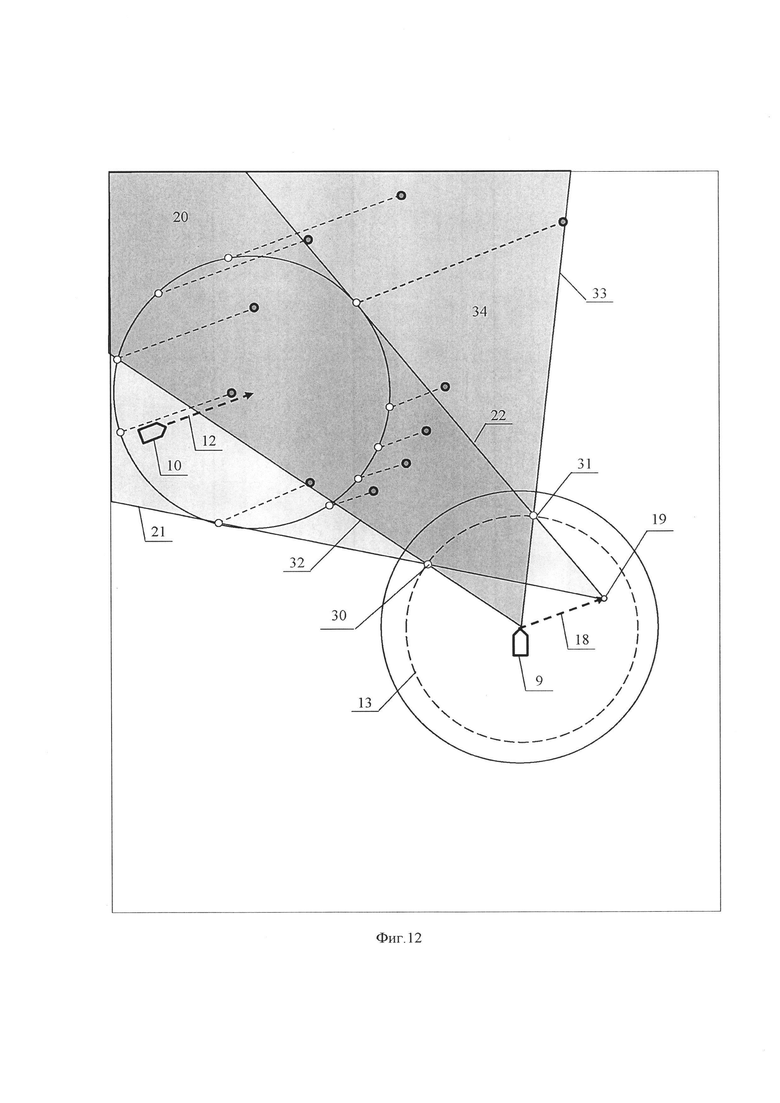
8. Формируют сектора опасных курсов маневрирующего судна
Формирование секторов иллюстрируется фиг. 12, на которой дополнительно изображены точки 30 и 31 пересечения линий 21 и 22, ограничивающих сектор относительных опасных курсов 20, с окружностью 13 позиций маневрирующего судна и линии 32 и 33, ограничивающие сектор опасных курсов 34.
Если скорость маневрирующего судна больше или равна скорости объекта маневра, то имеется один сектор опасных курсов, в противном случае таких секторов два.
Сектор опасных курсов 34 формируется путем формирования двух линий 32 и 33, начинающихся в точке расположения маневрирующего судна и проходящих через точки 30 и 31. Сектор 34, располагаемый между линиями 32 и 33 и является сектором опасных курсов.
Линии 32 и 33 описываются уравнениями:

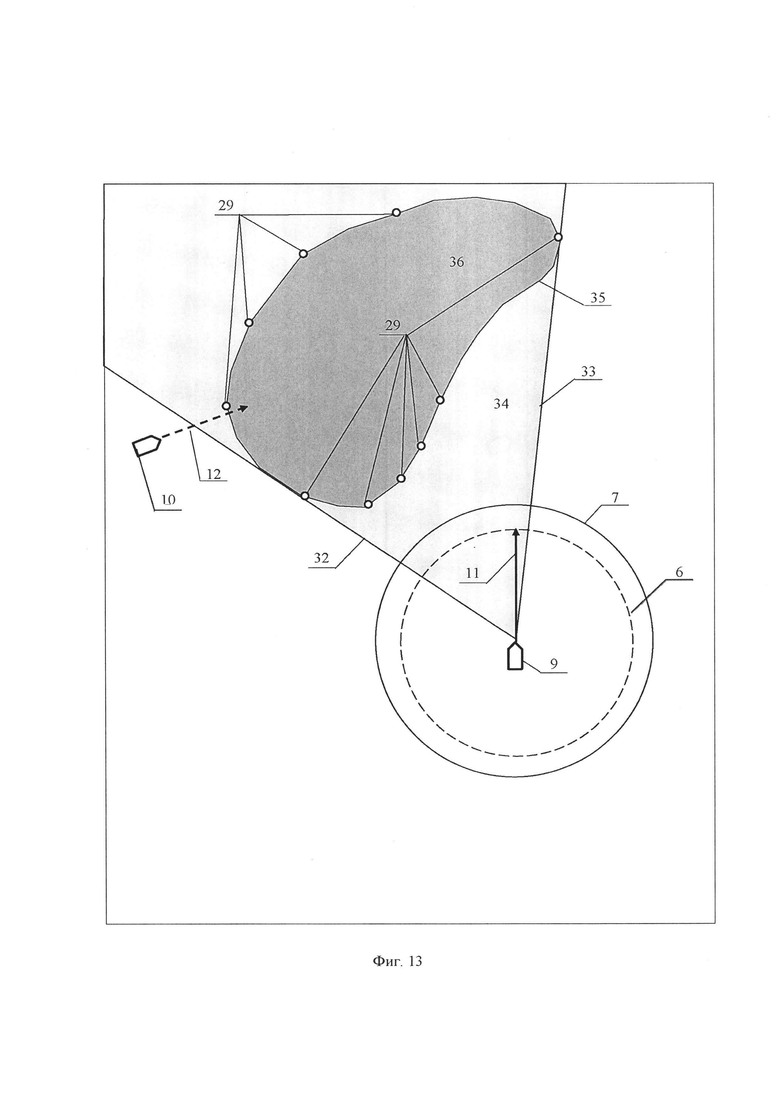
9. В каждом секторе опасных курсов формируют реальную область опасного сближения судов
Формирование реальной области опасного сближения иллюстрируется фиг. 13, на которой дополнительно изображены сектор опасных курсов 34, ограничивающие его линии 32 и 33, замкнутая линия 35, ограничивающая реальную область опасного сближения 36.
Формирование области осуществляется следующим образом.
Соседние смещенные точки 29 в каждом секторе опасных курсов 34 соединяются замкнутой линией 35, ограничивающей реальную область 36 опасного сближения судов (Фиг. 13).
Они образуют информационный массив координат точек границ реальной области опасного сближения.
Точки могут быть соединены либо плавной замкнутой линией, либо ломаной.
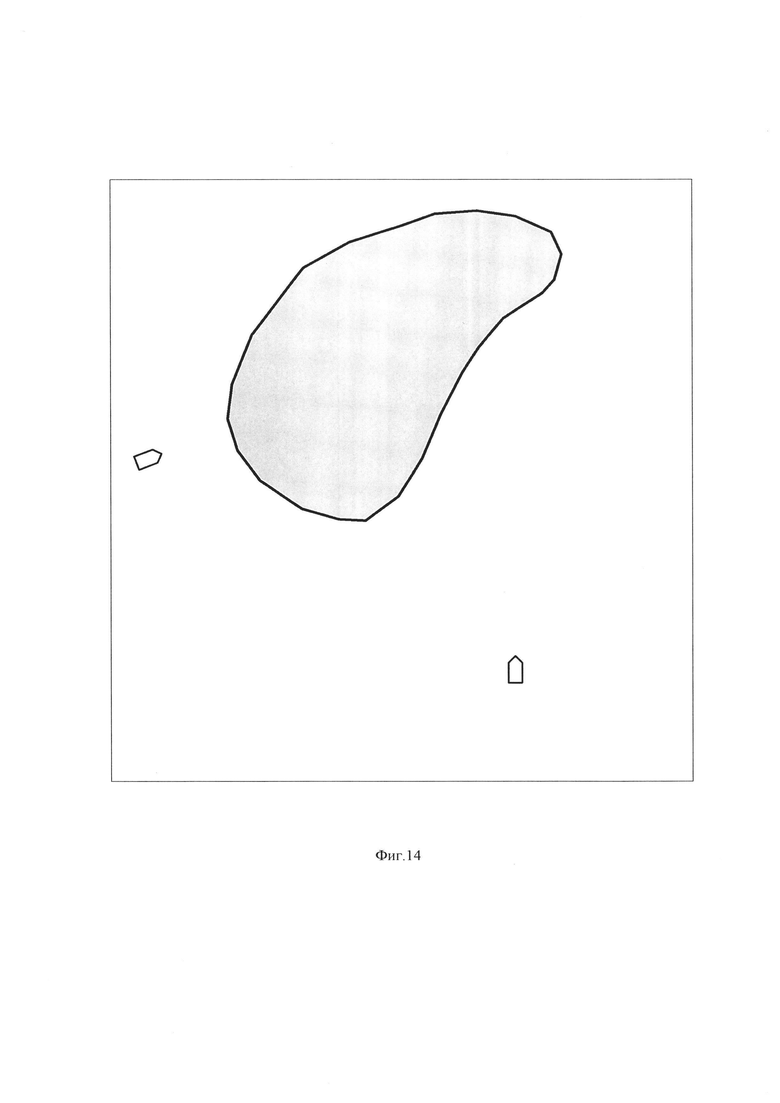
В результате получают реальную область 36 опасного сближения судов, которая находится в пределах сектора 34 опасных курсов. Данная область отображается на экране АРМ судоводителя (фиг. 14) и показывает область, движение в которую приводит к опасному сближению с объектом маневра.
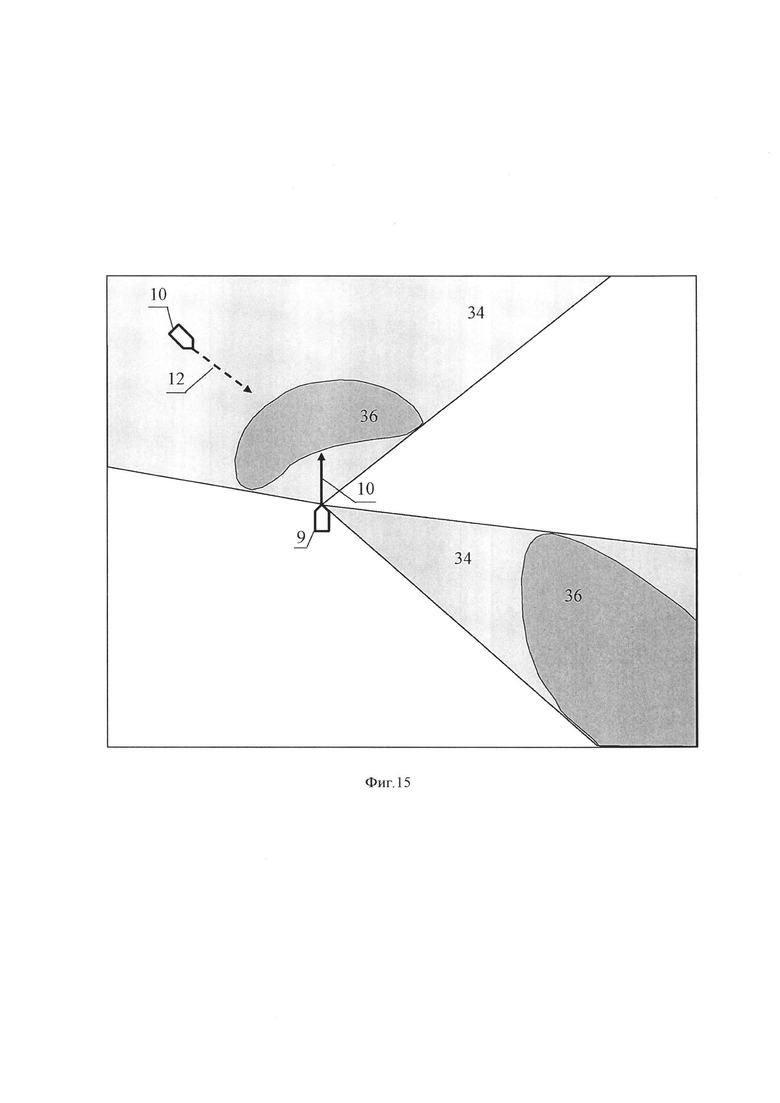
На фиг. 15 показан пример формирования и отображения реальных областей опасного сближения судов на индикаторе АРМ судоводителя для случая, когда скорость маневрирующего судна меньше скорости объекта маневра.
На фиг. 15 изображены маневрирующее судно 9, объект маневра 10, сектора опасных курсов 34, реальные области опасного сближения 36.
Техническим результатом предлагаемого технического решения является создание способа информационного обеспечения судоводителя данными о надводной обстановке, обеспечивающего формирование и отображение на экране АРМ судоводителя реальных областей опасного сближения судов, что обеспечивает повышение качества информационного обеспечения судоводителя о надводной обстановке и качество управления судном, решает задачу безопасного расхождения с судами, повышает безопасность плавания.
Рассмотренная система позволяет реализовать предложенный способ формирования областей опасного сближения судов.
Предложенный способ может использоваться в ручном режиме работы судоводителем путем выполнения всех операций на карте.
Таким образом, все существенные признаки способа и системы обеспечивают достижение технического результата и находятся в причинно-следственной связи с ним.
Источники информации
1. Патент РФ на изобретение № 2334996, МПК G01S 13/89, опубл. 27.09.2008. Способ представления судоводителю обобщенной информации для контроля и управления движением судна.
2. Патент РФ на изобретение № 2309083, МПК В63В 43/18, опубл. 27.10.2007, Способ распознавания опасного сближения двух маневрирующих судов.
3. Патент РФ на изобретение № 2262466, МПК В63В 43/18, опубл. 20.10.2005, Способ распознавания опасного сближения двух судов.
4. Патент РФ на изобретение №2077450, МПК В63В 49/00, опубл. 20.04.1997, Способ предоставления судоводителю обобщенной информации для контроля и управления движением судна.
5. Пешехонов В.Г., Шарыгин Б.Л., Миронов Ю.В. Единая система инерциальной навигации и стабилизации «Ладога-М» // Морская радиоэлектроника - 2003. - №1 (4). - С. 26-30.
Информационный ресурс:
http://wvm.elektropribor.spb.ru/katalog/sistemy-inertsialnoy-navigatsii-i-stabilizatsii/ladoga-me/
6. Информационный ресурс: river-sea.ru
7. Информационный ресурс: korabel.ru.ru
8. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А, Бараненко и др., Под ред. В.А. Кравченко. - СПб.: Политехника, 2003. - с. 34-36, 39-41, 216-218.
9. Информационные ресурсы: https://cirspb.ru/equipment-and-service/rls/mp-231/
https://4250107.ru/files/0001465-навигационная%20радиолокационная%20станция%20МР-231.pdf
http://промкаталог.рф/PublicDocuments/0624936.pdf
https://lk.rs-class.org/industry/getIndustry?d=DCB12A17-AE2D-B039-7407-699B7EA0754F
http://south.prom-ms.com/cat-elektrotehnicheskaya-prodykciya/apparatyra-svyazi-i-signalizacii/22894/
10. Информационный ресурс http://wvw.niichasprom.ru/catalog/produktsiya-spetsialnogo-naznacheniea/sisteme-edinogo-vremeni-i-etalonnykh-chastot-sev-i-ech/
11. Информационный ресурс
https://ekra.ru/product/ae/avtomatizatsiya-obektov-i-asu-ptk-evicon/sa-i-asu/s-o-e-v/
12. Информационные ресурсы
https://www.advantech.ru/products/embedded-automation-computers/sub_l-2mlckb
https://advantech.pro/catalog/
13. Информационные ресурсы
https://www.electronics.ru/files/article_pdf/6/article_6243_692.pdf
https://www.fastwel.ru/
https://masteropc.insat.ru/products/fastwel/Fastwel-IO_2015.pdf
14. Морская радиоэлектроника: Справочник / И.В. Соловьев, Г.Н. Корольков, А.А, Бараненко и др., под ред. В.А. Кравченко. - СПб: Политехника, 2003. - с. 88-92.
15. Копанев А.А., Музыченко О.Н. Новый этап в развитии БИУС «Требование-М» // Морская радиоэлектроника, 2011, №2 (36). - С. 17-23.
16. Копанев А.А., Музыченко О.Н. «Требование-М» - боевая информационно-управляющая система для Российского флота // Морские информационно-управляющие системы, 2012, №1, с. 8-15.
17. Копанев А.А., Музыченко О.Н. Современным кораблям флота России - новое поколение БИУС «Требование-М» // Морской вестник, 2012, №4 (44), с. 57-61.
18. Маклаев В.А. Союз традиций и современных технологий // Национальная оборона, 2011, №6. - С. 60-62.
19. Информационные ресурсы
https://topwar.ru/3632-russkie-fregaty-proekt-11356.html;
http//www.army-news.ru/2011/03/fregat-11356/httl,
http//www.topwar.ru/3632.russkie-fregaty-proekt-11356.html
https://wiki.wargaming.net/ru/Navy:Фрегаты_проекта_11356.
20. Морозов В.П. Курс сфероидной геодезии. Изд. 2, перераб. и доп. М., Недра, 1979, 296 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2077450C1 |
| Способ генерации предварительной прокладки пути судна и устройство для его реализации | 2021 |
|
RU2782617C1 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2334996C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ ОПАСНОГО СБЛИЖЕНИЯ СУДОВ, ИСПОЛЬЗУЮЩАЯ ОБЩЕЕ МОРСКОЕ ИНФОРМАЦИОННОЕ ПРОСТРАНСТВО | 2013 |
|
RU2548646C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ОПАСНОГО СБЛИЖЕНИЯ ДВУХ МАНЕВРИРУЮЩИХ СУДОВ | 2005 |
|
RU2309083C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗАВАРИЙНОГО ДВИЖЕНИЯ НАДВОДНОГО ИЛИ ПОДВОДНОГО СУДНА ПРИ НАЛИЧИИ ПОДВОДНЫХ ИЛИ НАДВОДНЫХ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ | 2012 |
|
RU2513198C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ СУДНА И ХАРАКТЕРИСТИК ЕГО ДВИЖЕНИЯ | 2013 |
|
RU2546846C2 |
| Оптико-электронная система преобразования данных изображения в элементы вектора состояния судна | 2023 |
|
RU2808873C1 |
Изобретение относится к судовождению, обеспечению безопасности плавания и расхождения с судами. В информационно-управляющей системе строят окружность позиций и область опасного сближения для своего судна. Формируют область относительного опасного сближения объекта маневра, строят сектор относительных опасных курсов маневрирующего судна, в данном секторе формируют линии относительного движения, пересекающие область относительного опасного сближения объекта маневра, и соответствующие им вектора относительного перемещения. Для каждой линии определяют координаты точек входа и выхода каждой линии относительного движения из области относительного опасного сближения объекта маневра. Рассчитывают относительное время входа и выхода своего судна из области относительного опасного сближения объекта маневра. Формируют сектора опасных курсов маневрирующего судна, а в них реальные области опасного сближения судов. Повышается качество информационного обеспечения судоводителя о надводной обстановке и качество управления судном. Решается задача безопасного расхождения с судами, повышается безопасность плавания. 2 з.п. ф-лы, 15 ил.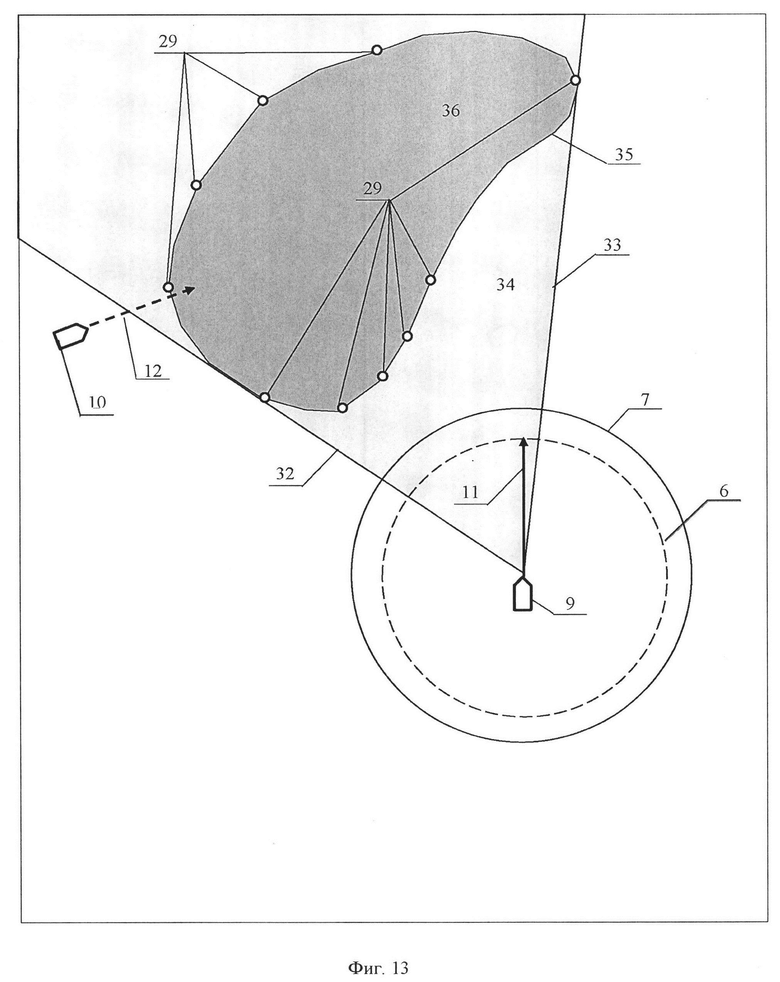
1. Способ информационного обеспечения судоводителя о надводной обстановке, заключающийся в том, что определяют координаты и параметры движения маневрирующего судна, определяют координаты и параметры движения объекта маневра, координаты и параметры движения маневрирующего судна от навигационной системы передаются в информационно-управляющую систему (ИУС), в ИУС строят окружность позиций и область опасного сближения для своего судна, формируют область относительного опасного сближения объекта маневра, строят сектор относительных опасных курсов маневрирующего судна, в данном секторе формируют линии относительного движения, пересекающие область относительного опасного сближения объекта маневра, и соответствующие им вектора относительного перемещения, для каждой линии определяют координаты точек входа и выхода линии относительного движения из области относительного опасного сближения объекта маневра, рассчитывают относительное время входа и выхода маневрирующего судна из области относительного опасного сближения объекта маневра, смещают точки входа и выхода линий относительного движения по направлению вектора перемещения объекта маневра на расстояние, равное произведению вектора перемещения объекта маневра на относительное время входа и выхода маневрирующего судна из относительной области опасного сближения объекта маневра соответственно, формируют сектора опасных курсов маневрирующего судна, а в них реальные области опасного сближения, для чего соединяют соседние смещенные точки в каждом из секторов опасных курсов в замкнутую линию, полученная реальная область опасного сближения судов отображается на экране автоматизированного рабочего места (АРМ) судоводителя и показывает область, движение в которую приводит к опасному сближению с объектом маневра.
2. Способ по п. 1, отличающийся тем, что точки соединяют ломаной линией, состоящей из отрезков прямых, соединяющих каждые две соседние точки области опасного сближения.
3. Способ по п. 1, отличающийся тем, что точки области опасного сближения соединяют плавной замкнутой линией.
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2077450C1 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2334996C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ОПАСНОГО СБЛИЖЕНИЯ ДВУХ МАНЕВРИРУЮЩИХ СУДОВ | 2005 |
|
RU2309083C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ОПАСНОГО СБЛИЖЕНИЯ ДВУХ СУДОВ | 2004 |
|
RU2262466C1 |
| WO 2007095671 A1, 30.08.2007 | |||
| US 3717873 A, 20.02.1973. | |||

