Изобретение относится к радиолокации воздушных целей (ВЦ) и может быть использовано в стационарных и мобильных импульсно-доплеровских радиолокаторах (ИДРЛ) с квазинепрерывным излучением (КНИ) при линейной частотной модуляции несущей частоты (ЛЧМ), предназначенных для решения многоцелевых задач обнаружения, измерения траекторных параметров, таких как дальность, скорость и ускорение ВЦ.
Известно [1,2], что повышение дальности обнаружения/точности измерения при близких к единице отношениях «сигнал/шум» (для ВЦ на больших удалениях и/или ВЦ с малой ЭПР) достигается путем увеличения базы когерентного накопления сигнала ВЦ. Для этого реализуются относительно длительные (от нескольких десятков до сотен мс) сеансы КНИ с высокой (ВЧПИ) частотой повторения простых и/или сложных коротких импульсов и малой скважностью. Режим ВЧПИ обладает рядом известных преимуществ [3-6], проявляющихся, прежде всего, при обзоре «вверх» и при обнаружении доплеровского сигнала ВЦ с относительно высокой радиальной скоростью, попадающего в широкую «прозрачную» зону спектра, свободную от частотных составляющих МО от земли, принимаемых по БЛ. В то же время при ВЧПИ возникает неоднозначность измерений внутрипериодного положения сигнала ВЦ (ВПЦ) и значительное количество «слепых» зон по дальности, обусловленных бланкированием приемника на время излучения импульса.
В указанных способах обнаружения/измерения дальности при ВЧПИ всегда присутствует «гладкая» пачка импульсов (немодулированная заданной ЛЧМ) и, следовательно, обеспечивается возможность непосредственного однозначного измерения доплеровской частоты (скорости), которое, как правило, выполняется по сигналам той же ПЗИ, на которой была обнаружена цель.
Недостатком указанных способов обнаружения/измерения дальности и скорости ВЦ при ВЧПИ отмечается ограничение по их применению для широкого класса ВЦ (например, мини- и микро-БЛА), доплеровская частота которых попадает в спектральную зону МО по БЛ, причем, особенно мощных при малой высоте размещения антенны (или малой высоте полета носителя ИДРЛ). На фоне мощных МО обнаружение сигналов таких ВЦ является практически невозможным.
Прототипом заявляемого способа является «Способ одновременного измерения дальности, скорости и ускорения малоскоростной маневрирующей воздушной цели в импульсно-доплеровских радиолокационных станциях при высокой частоте повторения импульсов и линейной частотной модуляции» (Патент РФ №2692912, МПК G01S 13/00, опубл. 01.07.2019, Бюл. №19).
Данный способ предполагает выполнение следующих действий.
Поиск/обнаружение цели с раскрытием слепых зон по дальности выполняют при ВЧПИ и заданной с заданной крутизной S0, а после обнаружения цели при ЧПИ Fп излучают еще две пачки с ЛЧМ при той же ЧПИ и крутизне S1 и S2 при соблюдении симметричности для приращений крутизны ЛЧМ относительно крутизны S0;
По принятым сигналам от трех ПЗИ(i), (i=0,1,2) с заданными значениями крутизны ЛЧМ S0, S1 и S2 выполняют измерение и запоминание неоднозначных задержек τi (ВПЦ), смещенных при заданной ЛЧМ доплеровских частот Fia для всех трех ПЗИ;
На основании частотных и временных измерений Fia, τi (i=0,1,2), при известных значениях частоты повторения Fп, длины волны λ, постоянного интервала времени Тпачки между моментами излучения ближайших ПЗИ, крутизны S0, S1, S2 определяют одновременно (в рамках одного сеанса обнаружения/измерения) текущие значения радиального ускорения, скорости и дальности до цели путем выполнения следующих вычислительных операций: определяют отклонения ΔF1a, ΔF2a измеренных значений дальномерной частоты F01, F02, полученных по второй и третьей пачке с ЛЧМ, от базовой дальномерной частоты F0a, определенной по первой пачке с ЛЧМ, а также сумму этих отклонений ΔFсумм а по формулам:
ΔF1a = F1a - F0a ; ΔF2a = F2a - F0a; ΔFсумм а = ΔF1a +ΔF2a;
Вычисляют среднее значение Δτср смещения ВПЦ за время Тпачки между ближайшими моментами излучения ПЗИ по измерениям ВПЦ τ0 и τ2 , полученным по первой и третьей ПЗИ:
Δτср = (τз 0 - τз 2)/2;
Определяют значение крутизны Sa дополнительной ЛЧМ, обусловленной радиальным ускорением, а также значение ац этого ускорения по соотношениям
Sa = [ΔFсумм а + [S1 + 2S2]⋅Δτср] / [3 (Тпачки - Δτср)]; ац = (λ/2) Sa;
Вычисляют доплеровское смещение частоты сигнала цели Fд2 и радиальную скорость Vц, соответствующие моменту излучения третьей пачки по формулам:
 ; Vц= (λ/2) Fд 2;
; Vц= (λ/2) Fд 2;
Определяют дальность R2 до ВЦ на момент излучения третьей пачки по формуле:
R2= 
 ;
;
с использованием рассчитанной однозначной дальности R2 при известной длительности ППИ Тп = 1/Fп, измеренного/оцененного по сигналам третьей пачки ВЦЦ τ32 вычисляют уточненное значение дальности R на момент излучения третьей ПЗИ по известным формулам:
 ;
;  ,
,
где: int{•} - процедура взятия целой части числа, заключенного в скобках.
Недостатком способа-прототипа является функциональное ограничение - возможность применения только в одноцелевой ситуации, когда в пространстве ГЛ находится только одна цель, а на всех ЛЧМ-пачках дискрету дальности, в котором ВЦ обнаруживается, соответствует только одна измеряемая дальномерная частота.
Задачей изобретения является создание способа позволяющего определения дальности, радиальных составляющих скорости и ускорения для всех обнаруженных целей, в т. ч. при наличии мешающих сигналов, создающих «ложные» частотные измерения при ПЗИ с ВЧПИ с заданной ЛЧМ.
Техническим результатом заявляемого способа является расширение функциональных возможностей ИДРЛ в части, касающейся обеспечения возможности его применения в многоцелевых ситуациях при сложной сигнально-помеховой обстановке.
Технический результат достигается тем, что в способе обнаружения, измерения дальностей, скоростей и ускорений нескольких малоскоростных низковысотных целей в главном луче при ЛЧМ несущего колебания в импульсно-доплеровских радиолокаторах, заключающемся в излучении при поиске и обнаружении пачек зондирующих радиоимпульсов (ПЗИ) при высокой частоте повторения импульсов (ЧПИ) с варьируемым значением ЧПИ для раскрытия слепых зон по дальности и заданной крутизной ЛЧМ S0, приеме отраженных от земли и целей сигналов многоканальным приемным устройством с ЛЧМ-гетеродином, измерении по сигналам обнаруженных целей и запоминании их дальномерных частот и неоднозначных задержек - внутрипериодных дискретов дальности, излучении двух дополнительны ПЗИ с такой же ЧПИ, но со значениями заданной крутизны ЛЧМ S1 и S2, приеме отраженных от земли и целей сигналов, обнаружении и измерении ДМЧ целей, причем в тех же каналах дальности, в которых цели были обнаружены по ПЗИ с крутизной S0 , запоминании измерений, дополнительно к моменту излучения ПЗИ с крутизной S0 для всех дискретов дальности рассчитывают границы слепых зон по частоте, в которых присутствуют мешающие отражения от земли (МО) по боковым лепесткам (БЛ), основываясь при этом на текущей информации об ориентации и угловых размерах БЛ, формирующих «следы» на земле, о высоте и скорости фазового центра антенны, а также на данных о параметрах излучения таких как ЧПИ, длительность импульса, скважность, крутизна ЛЧМ, ширина доплеровского фильтра, далее в каждом канале дальности рассматривают на предмет превышения «порога обнаружения» только те доплеровские фильтры, которые находятся вне «слепых зон по частоте», и после этого измеряют и запоминают ДМЧ и номера дискретов неоднозначной дальности для всех обнаруженных целей, к моментам излучения ПЗИ со крутизной S1 и S2 для тех же каналов дальности, в которых обнаруживались цели при ПЗИ с S0, аналогично определяют границы «слепых зон по частоте», анализируют превышение порога обнаружения в фильтрах, расположенных вне «слепой зоны», измеряют и запоминают ДМЧ обнаруженных целей, на основании частотных измерений по всем трем ПЗИ с различными значениями крутизны ЛЧМ, для каждого дискрета дальности идентифицируют «триады» частотных измерений, каждая из которых соответствует определенной неразличимой по дальности цели, находящейся в рассматриваемом дискрете дальности, и для каждой выявленной «целевой триады частот» с учетом внутрипериодного положения дискрета дальности определяют дальность, скорость и ускорение.
Технический результат достигается при выполнении следующих действий:
При задаваемых различных значениях крутизны ЛЧМ и предварительно рассчитываемых границах спектра мешающих отражений обеспечивают возможность обнаружения/измерения дальномерных частот сигналов нескольких ВЦ, вынесенных с помощью ЛЧМ за границы этого спектра, причем ВЦ могут быть высоко- и малоскоростными, зависшими, неразличимыми/различимыми по дальности, соответственно находящимися в одном/в разных дискретах дальности. При идентификации комбинаций (триад) дальномерных частот каждой ВЦ, выполняемой для каждого дискрета дальности с обнаружением, обеспечивают на основе выявленных триад дальномерных частот определение дальности, скорости и ускорения для всех обнаруженных целей. В совокупности это приводит к техническому результату - расширению функциональных возможностей радара в части, касающейся возможности его применения при многоцелевых ситуациях в главном луче и сложной сигнально-помеховой обстановке, обусловленной мешающими отражениями от земли.
Предлагаемый способ осуществляется следующим образом:
При поиске/обнаружении излучают ПЗИ с ВЧПИ (с варьируемой ЧПИ - для раскрытия «слепых зон по дальности») и с заданной крутизной ЛЧМ S0;
Осуществляют прием отраженных от земли и ВЦ сигналов многоканальным (по дальности и доплеровской частоте) приемным устройством с ЛЧМ-гетеродином и при обнаружении ВЦ выполняют измерение по сигналам целей и запоминание значений ДМЧ и ВПЦ (в дискретах дальности ППИ).
После первоначального обнаружения/измерения параметров целей при такой же частоте повторения излучают еще две ПЗИ с заданными значениями крутизны S1 и S2 , причем S0 является средним между S1 и S2, а приращения крутизны имеют разные знаки;
Осуществляют прием отраженных от земли и целей сигналов по этим пачкам, обнаружение и измерение/запоминание ДМЧ целей, причем, в отличие от прототипа, обнаружение малоскоростных и зависающих ВЦ производят в тех же каналах дальности, в которых цели были обнаружены по первой пачке с крутизной S0
В отличие от прототипа и указанных аналогов, к моменту начала излучения ПЗИ с крутизной ЛЧМ S0 на этапе поиска/обнаружения для всех каналов дальности (внутрипериодных дискретов) рассчитывают границы «слепых зон по частоте», в которых присутствуют мощные мешающие отражения от земли по БЛ, основываясь при этом:
- на текущей информации об ориентации и угловых размерах БЛ, облучающих фрагменты земной поверхности, на которых формируются мешающие отражения, о высоте размещения или высоте и скорости движения фазового центра (ФЦА) антенны (для мобильных вариантов ИДРЛ);
- на априорных данных о параметрах излучения (ЧПИ, длительность импульса, скважность, крутизна ЛЧМ, ширина доплеровского фильтра и др.), и далее при обработке эхо-сигнала в каждом канале дальности на предмет превышения «порога обнаружения» рассматривают только те доплеровские фильтры, которые находятся вне «слепых зон по частоте», и после этого измеряют и запоминают значения ДМЧ и ВПЦ (номера внутрипериодных дискретов дальности) всех обнаруженных целей.
К моментам излучения ПЗИ с крутизной S1 и S2 для тех же каналов дальности, в которых обнаруживались цели при ПЗИ с крутизной S0, аналогично позиции 5, определяют границы «слепых зон по частоте», и анализируют превышение порога обнаружения в фильтрах, расположенных вне «слепой зоны», измеряют и запоминают ДМЧ обнаруженных целей.
Используя запомненные измерения ДМЧ по всем трем ПЗИ с различными значениями крутизны, для каждого дискрета дальности, в котором происходило обнаружение, идентифицируют триады частотных измерений, каждая из которых соответствует определенной цели из возможной совокупности неразличимых по дальности целей в рамках рассматриваемого дискрета дальности, для чего:
относительно максимальной частоты F01 из ранжированного (по убыванию) базового набора запомненных частотных измерений {F0 k,, k=1,..N0} по пачке П0 с крутизной S0 определяют все положительные отклонения для частот из ранжированного набора измерений по пачке П1 при крутизне ЛЧМ S1>S0 {F1 m, m=1,..N1} и все отрицательные отклонения частот из ранжированного набора измерений по пачке П2 при крутизне ЛЧМ S2< S0 {F2 n, n=1,..N2}, рассчитывают все возможные комбинации сумм одного положительного и одного отрицательного отклонения от максимальной базовой частоты («невязок» модулей частотных отклонений);
рассчитывают квадратичные формы нормированных невязок (нормируемых расчетным среднеквадратическим отклонением (СКО) для ошибок частотных измерений, обусловленных дискретизацией измерений, отношением сигнал/шум, ошибками девиации частоты при реализации ЛЧМ и другими факторами), определяют триады частот (базовая частота и две частоты, полученные при S1 и S2), для которых квадратичная форма является минимальной и не превышает значения 5,243 (по критерию распределения χ2 с одной степенью свободы);
для каждой триады частот по известным формулам вида (2)-(8), упрощенным при Δτср =0, τз 0 = τз 1 = τз 2 = τз (нахождение ВЦ в одном и том же дискрете дальности на всех трех ПЗИ), рассчитывают дальность, радиальные составляющие скорости, ускорения цели и исключают из дальнейшего рассмотрения все частоты из использованной триады, кроме базовой частоты;
выполняют процедуры, аналогичные позициям 1-3, для всех остальных базовых частот из набора {F0 k, k=1,..N0}, оперируя при этом постепенно сокращающимися (при каждой итерации) наборами частотных измерений {F1 m, m=1,..N*1}и {F2 n, n=1,..N*2}, где: N*1, N*2 - количество частотных измерений с учетом исключения частотных измерений на предыдущей итерации.
Выполняют операции, аналогичные позициям 1 - 4, для всех дискретов дальности в рамках ППИ, в которых обнаруживались цели и, в итоге, завершают решение многоцелевой задачи обнаружения, измерения дальности, скорости и ускорения на основе трех ПЗИ с постоянной ВЧПИ и различной заданной крутизной ЛЧМ.
Значительная относительная ширина «зоны прозрачности по частоте», характерная для режима ВЧПИ и ВЧПИ с ЛЧМ, в частности, позволяет применять предложенный способ для одновременного обнаружения/измерения дальности, скорости, ускорения как для малоскоростных и зависающих целей, так и для высокоскоростных целей, тоже находящихся в зондируемом пространстве ГЛ. Эта способность может также рассматриваться как технический эффект изобретения, заключающийся в расширении функциональных возможностей ИДРЛ в рамках одного режима квазинепрерывного излучения при решении многоцелевых задач обнаружения и захвата ВЦ в широких диапазонах радиальных скоростей (включающем и нулевые значения скорости) и дальностей до ВЦ.
Работоспособность и эффективность применения заявляемого изобретения проверена аналитически, подтверждена результатами серии экспериментов, выполненных на базе программного комплекса имитационного «сквозного» моделирования работы стационарного и самолетного ИДРЛ (включая все процедуры первичной обработки имитируемого эхо-сигнала от земли и целей, обнаружения, идентификации, измерения, вторичной обработки) в сложной многоцелевой сигнально-помеховой обстановке, а также результатами натурных летных экспериментов с применением бортового алгоритмико-программного модуля, разработанного на основе заявляемого способа.
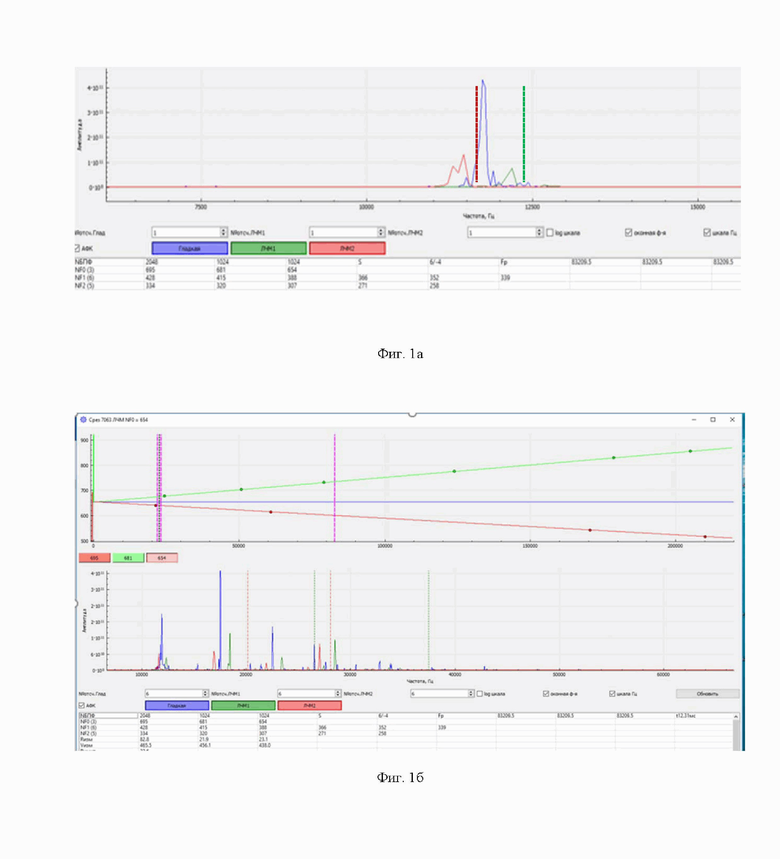
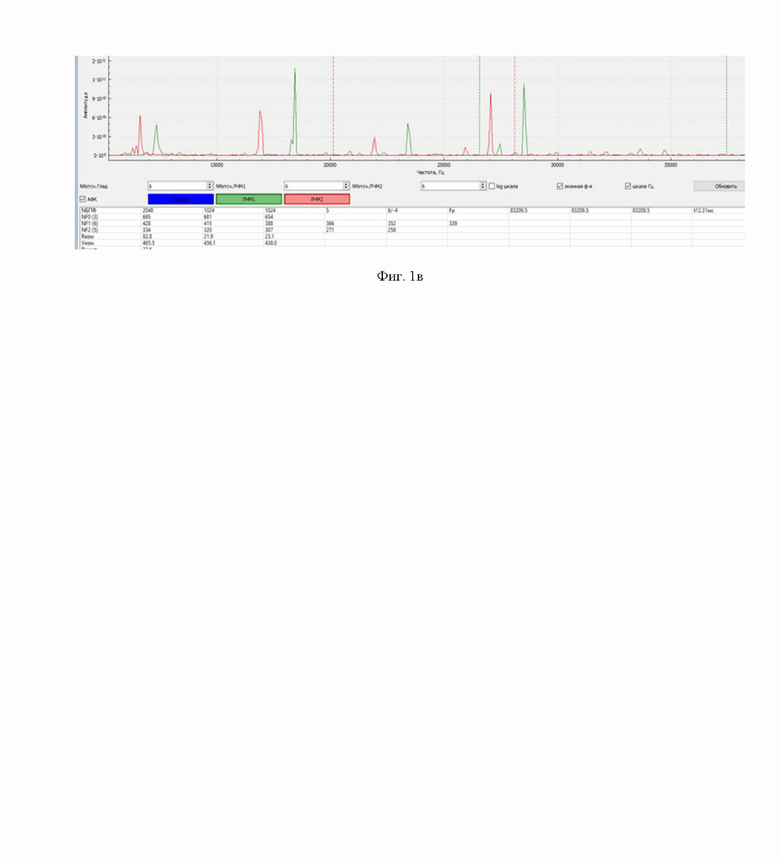
На фиг.1 показаны характерные экспериментальные результаты, полученные на основе данных бортовой регистрации РЛ эхо-сигналов от земли и ВЦ, данных РЛ измерений и других параметров на самолете - носителе ИДРЛ Х-диапазона в режиме ВЧПИ с ЛЧМ - в горизонтальном полете на высоте около 6100 м при путевой скорости около 230 м/с. При этом ось ГЛ ДНА направлена над горизонтом с углом места 2,5° при азимуте 51,8° и в пространстве ГЛ (2° [азимутальная плоскость] × 3° [угломестная плоскость]) на различных удалениях находятся несколько приближающихся целей. На фиг.1а показаны спектры реальных сигналов мешающих отражений от земли, поступающих по БЛ (спектры сигналов «слепой зоны» по частоте) при «гладкой» ПЗИ (синий цвет), при ПЗИ с положительной крутизной ЛЧМ 6 кГц/мс (зеленый цвет), при ПЗИ с отрицательной крутизной ЛЧМ - 4 кГц/мс (красный), а также рассчитанные (в соответствии с заявленным способом) значения верхних границ «слепых зон» для ПЗИ с ЛЧМ (отмеченные, соответственно, зеленой и красной штриховой линией). Спектры сигналов на фиг.1а приводятся для первого внутрипериодного дискрета дальности, котором ВЦ отсутствует и присутствую только отражения от земли по БЛ. На фиг.1б показаны аналогичные спектры сигналов от земли и от ВЦ, соответствующие тому дискрету дальности, где первоначально произошло обнаружение. В верхней части фиг.1б: ордината - номера доплеровских фильтров; абсцисса - дальность в метрах; прямые - соответствуют значениям крутизны; проекции точек на прямых на ось дальности показывают дальности до действительных и ложных целей. Нижняя часть фиг.1б отражает сложные многочастотные спектры отражений от земли по БЛ, от ВЦ, ложных целей, «фюзеляжные» и «турбовинтовые» составляющие спектрального портрета ВЦ, присутствующие при «гладкой» ПЗИ и ПЗИ с ЛЧМ. На фиг.1в в масштабированном виде приводятся показаны спектры только для ЛЧМ-сигналов. Штриховые линии - расчетные границы, используемые при идентификации ЛЧМ-сигналов целей.
В таблицах на фиг.1б и 1в приведены измеренные (заявленным способом) значения дальности/скорости сближения для всех трех действительных целей, обнаруженных и идентифицированных в поличастотной ситуации, причем при сопоставлении с данными внешнетраекторных измерений подтверждается достаточно высокая точность измерений (близкая к потенциальной точности, определяемой инструментальными погрешностям частотных и временных измерений).
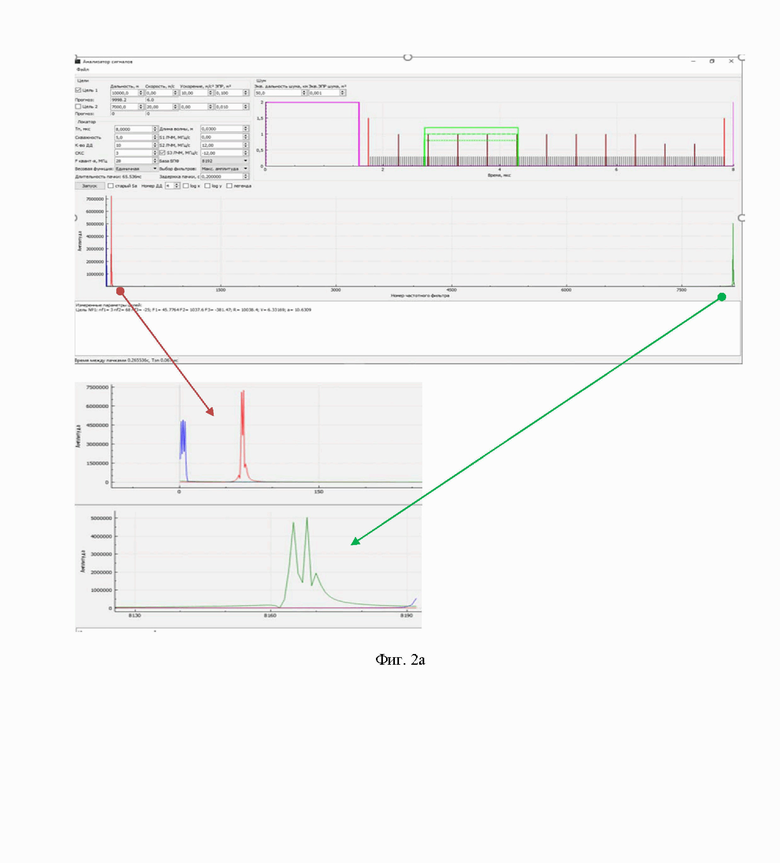
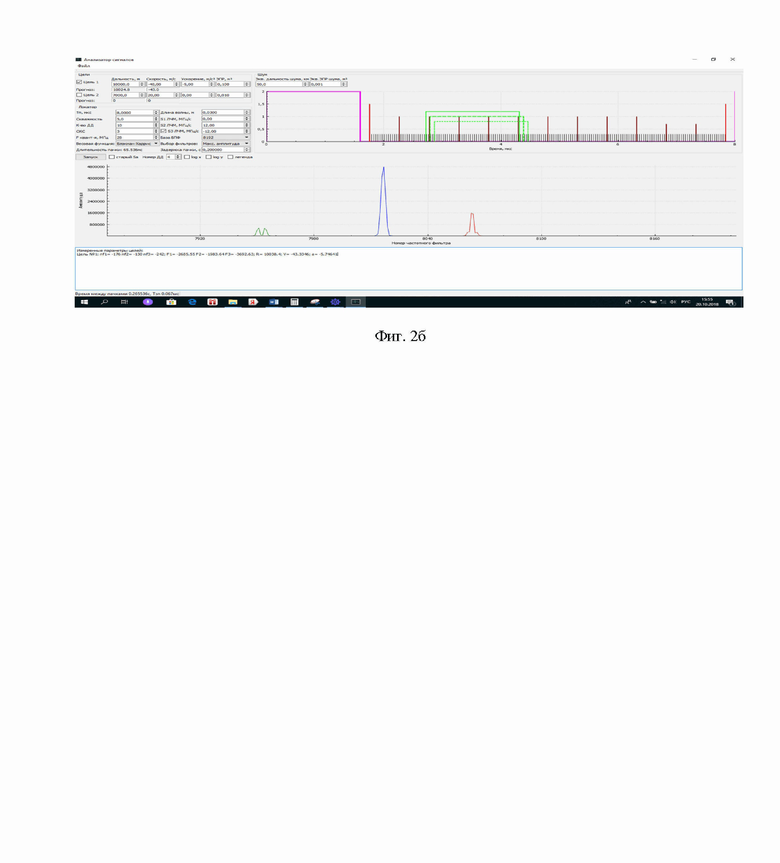
На фиг.2 показаны характерные экспериментальные результаты, полученные при «сквозном» имитационном моделировании работы стационарного (наземного) варианта ИДРЛ с использованием заявляемого способа, выполненном с целью оценки точностных характеристик измерений дальности, скорости и ускорения каждой обнаруженной цели, включая неподвижные и удаляющиеся ВЦ.
В качестве примера результатов эксперимента из статистической серии на фиг.2а показаны спектры сигналов и результаты измерений для неподвижной ВЦ, находящейся на удалении 10 км, которая момент излучения первой ПЗИ начинает сближение с постоянным ускорением 10 м/с2, а на фиг.2б - для цели, удаляющейся с начальной скоростью - 40 м/с и постоянным отрицательным ускорением - 5 м/с2. По результатам серии модельных экспериментов на уровне СКО погрешности по дальности составляют несколько десятков метров, по скорости - несколько десятых м/с, по ускорения - несколько десятых м/с2.
Результаты экспериментов показали работоспособность и эффективность заявляемого способа в диапазонах положительных, отрицательных и нулевых скоростей и ускорений ВЦ, в широком диапазоне дальностей, а также простоту практической реализации способа на базе типовых аппаратных средств ИДРЛ, только на основе совершенствования специального алгоритмико-программного обеспечения типовых и разрабатываемых ИДРЛ.
Источники информации, принятые во внимание.
1. Радиолокационные системы многофункциональных самолетов. Т. 1. РЛС - информационная основа боевых действий многофункциональных самолетов. / Под ред. Канащенкова А. И. и Меркулова В. И. М.: Радиотехника, 2006. 656 с.
2. Справочник по радиолокации. Том 3. /Под ред. М. Сколника, Нью-Йорк, 1970. Пер. с англ. (в 4-х томах) // Под общей ред. К.Н. Трофимова. М.: Сов. Радио, 1979.
3. Поттер Н.С. Устранение неоднозначности по дальности в РЛС с высокой частотой повторения, ВРЭ, Серия ОТ, Вып.11, 1977.
4. Редди Н.С., Свейми М.Н. Устранение неоднозначности по дальности и доплеровскому смещению частоты в РЛС со средней частотой повторения при наличии многочисленных целей, перевод Л-46681, Всесоюзный центр переводов, Москва, 1985.
5. У. Х. Лонг III, К.Э. Харригер. РЛС AN\APG-66 со средней частотой повторения.
6. S. A. Hovantssian. Medium PRF performance analysis. IEEE Trans. Aerosp. Eltctron. Syst. vol. AES-18, no 3, pp 286-296, May 1982.
Изобретение относится к радиолокации воздушных целей (ВЦ) и может быть использовано в стационарных и мобильных импульсно-доплеровских радиолокаторах (ИДРЛ) с квазинепрерывным излучением при линейной частотной модуляции несущей частоты (ЛЧМ). Техническим результатом является расширение функциональных возможностей ИДРЛ в части, касающейся обеспечения возможности его применения в многоцелевых ситуациях в главном луче при сложной сигнально-помеховой обстановке, обусловленной мешающими отражениями от земли. В заявленном способе при задаваемых различных значениях крутизны ЛЧМ и предварительно рассчитываемых границах спектра мешающих отражений обеспечивают возможность обнаружения и измерения дальномерных частот сигналов нескольких ВЦ, вынесенных с помощью ЛЧМ за границы этого спектра, причем ВЦ могут быть высоко- и малоскоростными, зависшими, неразличимыми или различимыми по дальности, соответственно находящимися в одном или в разных дискретах дальности. При идентификации комбинаций – триад дальномерных частот каждой ВЦ, выполняемой для каждого дискрета дальности с обнаружением, обеспечивают на основе выявленных триад дальномерных частот определение дальности, скорости и ускорения для всех обнаруженных целей. 5 ил.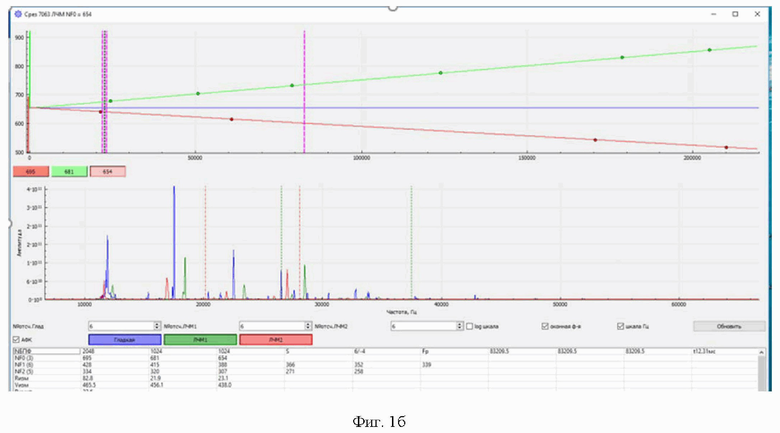
Способ обнаружения, измерения дальностей, скоростей и ускорений нескольких малоскоростных низковысотных целей в главном луче при линейной частотной модуляции несущего колебания в импульсно-доплеровских радиолокаторах, заключающийся в излучении при поиске и обнаружении пачек зондирующих радиоимпульсов (ПЗИ) при высокой частоте повторения импульсов (ЧПИ) с варьируемым значением ЧПИ для раскрытия слепых зон по дальности и заданной крутизной S0 линейной частотной модуляции несущей частоты (ЛЧМ), приеме отраженных от земли и целей сигналов многоканальным приемным устройством с ЛЧМ-гетеродином, измерении по сигналам обнаруженных целей и запоминании их дальномерных частот (ДМЧ) и неоднозначных задержек – внутрипериодных дискретов дальности, излучении двух дополнительных ПЗИ с такой же ЧПИ, но со значениями заданной крутизны ЛЧМ S1 и S2, при этом S0 является средним между S1 и S2, а приращения крутизны ЛЧМ S1 и S2 относительно крутизны S0 имеют разные знаки, приеме отраженных от земли и целей сигналов, обнаружении и измерении ДМЧ целей, причем в тех же каналах дальности, в которых цели были обнаружены по ПЗИ с крутизной S0, запоминании измерений, отличающийся тем, что к моменту излучения ПЗИ с крутизной S0 для всех дискретов дальности рассчитывают границы слепых зон по частоте, в которых присутствуют мешающие отражения от земли (МО) по боковым лепесткам (БЛ), основываясь при этом на текущей информации об ориентации и угловых размерах БЛ, формирующих МО, о высоте и скорости фазового центра антенны, а также на данных о ЧПИ, длительности импульса, скважности, крутизне ЛЧМ, ширине доплеровского фильтра, далее в каждом канале дальности рассматривают на предмет превышения «порога обнаружения» только те доплеровские фильтры, которые находятся вне «слепых зон по частоте», и после этого измеряют и запоминают ДМЧ и номера дискретов неоднозначной дальности для всех обнаруженных целей, к моментам излучения ПЗИ с крутизной S1 и S2 для тех же каналов дальности, в которых обнаруживались цели при ПЗИ с S0, аналогично определяют границы «слепых зон по частоте», анализируют превышение порога обнаружения в фильтрах, расположенных вне «слепой зоны», измеряют и запоминают ДМЧ обнаруженных целей, на основании частотных измерений по всем трем ПЗИ с различными значениями крутизны ЛЧМ, для каждого дискрета дальности идентифицируют «триады» частотных измерений, каждая из которых включает базовую частоту, полученную при крутизне ЛЧМ S0, и две частоты, полученные при крутизне ЛЧМ S1, S2 и для которых квадратичная форма невязки модулей отклонений от базовой частоты, нормируемая расчетным среднеквадратическим отклонением для ошибок частотных измерений, обусловленных дискретизацией измерений, отношением сигнал/шум, ошибками девиации частоты при реализации ЛЧМ, является минимальной, и затем во всех дискретах дальности с превышением порога обнаружения для каждой выявленной «триады» частотных измерений, соответствующей цели в рассматриваемом дискрете дальности, с учетом внутрипериодного положения дискрета дальности определяют дальность, скорость и ускорение.
