Изобретение относится к копрам, применяемым для погружения в грунт свай, обсадных труб и других элементов.
Известен механизм коррекции мачты копра по патенту ЕР 1983147, включающий два гидроцилиндра, обеспечивающих коррекцию мачты при наведении сваи и погружателя, а также для перевода мачты из транспортного положения в рабочее (и наоборот).
Приведенное техническое решение имеет следующий недостаток: данные гидроцилиндры имеют независимое управление, подача рабочей жидкости в их полости осуществляется от отдельных гидрораспределителей. Каждый из данных распределителей управляется либо вручную, либо от двух двухзолотниковых блоков управления, либо от одного четырехзолотникового блока управления. В любом случае сложно обеспечить при этом строго определенное положение гидрораспределителей, а следовательно, и требуемый расход рабочей жидкости в соответствующую полость гидроцилиндра, коррекция положения мачты копра осуществляется последовательными приближениями, что обуславливает потери времени и приводит к уменьшению производительности установки в целом.
Известно также техническое решение по патенту JP 10-317863, содержащее два гидроцилиндра, соединенных с мачтой копра, рабочая жидкость в полости которых поступает через один трехпозиционный гидрораспределитель, управляемый гидравлически с помощью двухпозиционного блока управления, одно из положений которого соответствует положению гидрораспределителя, при котором напорная линия сообщается со штоковыми полостями гидроцилиндров, а сливная - с поршневыми полостями, второе положение блока управления обеспечивает обратную коммутацию. Дополнительно механизм коррекции содержит два двухпозиционных клапана с электрическим управлением, при включении которых штоковая и поршневая полости одного из гидроцилиндров разобщаются как с напорной, так и со сливной линией. Таким образом, при блокировании одного из цилиндров работа вторым обуславливает поперечную коррекцию мачты.
Данное техническое решение имеет следующий недостаток: при блокировании одного из цилиндров с целью поперечной коррекции мачты, в силу кинематических особенностей системы неизбежно будет иметь место одновременный продольный наклон мачты, что потребует серии последовательных корректировок для достижения требуемого положения мачты.
Задачей предлагаемого изобретения является создание механизма коррекции мачты копра, обеспечивающего минимальное время установки мачты в требуемое положение, чем достигается повышение производительности копровой установки.
Поставленная задача решается тем, что механизм коррекции мачты копра, включающий сливную и напорную магистрали, два гидроцилиндра, каждый из которых приводится от трехпозиционного гидрораспределителя, управляющие полости которого соединены с выходами клапанов «или», четырехпозиционный блок управления, выходные каналы которого соединены с входными каналами клапанов «или», причем две из позиций блока управления соответствует положению гидрораспределителей, при которых рабочая жидкость из напорной магистрали поступает в поршневую полость одного из гидроцилиндров и в штоковую полость другого гидроцилиндра, а штоковая полость первого гидроцилиндра и поршневая второго соединены со сливной магистралью.
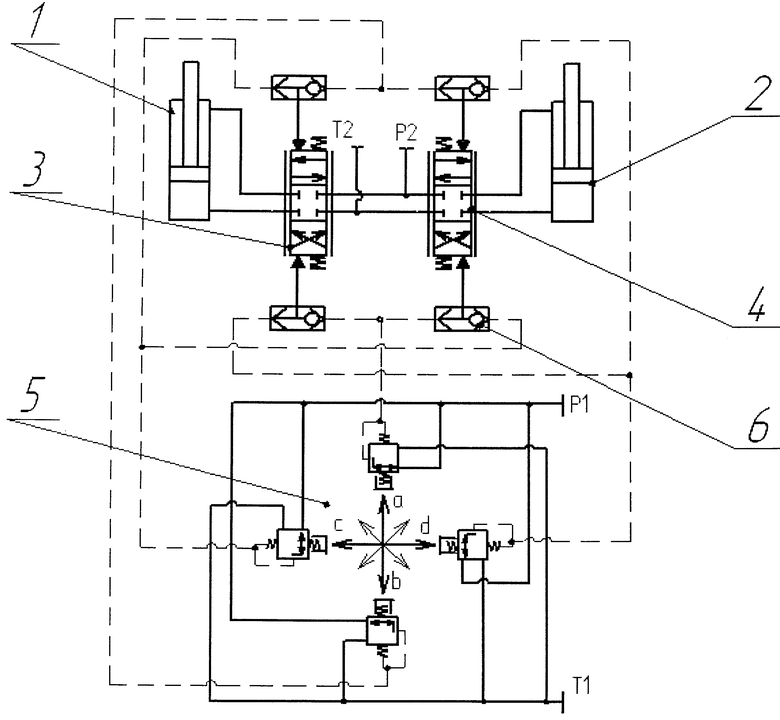
Предлагаемое изобретение поясняется чертежами: на фиг.1 представлена гидравлическая схема механизма.
Механизм коррекции мачты копра содержит гидроцилиндры 1 и 2, штоки которых шарнирно соединены с мачтой копра, а корпусы опираются на элементы конструкции копра, например стрелу. Штоковые и поршневые полости гидроцилиндров 1 и 2 периодически коммутируются с напорной (Р2) и сливной (Т2) магистралями посредством трехпозиционных гидрораспределителей 3 и 4, которые в нейтральном положении разобщают указанные полости с магистралями, тем самым блокируя гидроцилиндры. Для управления гидрораспределетелями 3 и 4 в составе механизма имеется четырехпозиционный блок управления 5, обеспечивающий подачу гидравлического сигнала низкого давления (магистрали Р1 и Т1) в управляющие полости гидрораспределителей 3 и 4 через клапан «или» 6, имеющийся на каждом их входе в соответствующую управляющую полость.
Механизм коррекции мачты работает следующим образом.
Четырехпозиционный блок управления 5 находится в нейтральном положении, полости гидроцилиндров 1 и 2 разобщены с напорной и штоковой магистралями, гидроцилиндры блокированы в соответствующих положениях, мачта зафиксирована. При переводе управляющего элемента четырехпозиционного блока управления в положение «а» рабочая жидкость от магистрали низкого давления (Р1) поступает через клапаны «или» одновременно в управляющие полости гидрораспределителей 3 и 4, перемещая соответствующие золотники, тем самым коммутируя поршневые полости гидроцилиндров 1 и 2 с магистралью высокого давления (Р2), а их штоковые полости - со сливной магистралью (Т2). Поскольку давление на входе в управляющие полости гидрораспределителей 3 и 4 одинаково, то их золотники будут перемещаться с одинаковыми скоростями, занимая в каждый момент времени одинаковые положения, что, при наличии на золотниках компенсаторов давления (на схеме не показаны), обусловит одинаковые расходы через гидрораспределители и, соответственно, одинаковые скорости движения штоков гидроцилиндров 1 и 2. Результатом описанной операции будет продольное перемещение мачты «вперед», без отклонений в поперечном направлении.
Описанный процесс работы механизма будет иметь место и при включении блока управления в положение «b», с той разницей, что рабочая жидкость будет поступать в штоковые полости гидроцилиндров 1 и 2 и вытесняться из поршневых, что соответствует наклону мачты «назад».
В положениях «c» и «d» блока управления золотники гидрораспределителей 3 и 4 перемещаются в противоположных направлениях, рабочая жидкость из напорной магистрали подается в поршневую полость одного гидроцилиндра и в штоковую другого, сливная магистраль соединяется с соответствующими штоковой и поршневой полостями, шток одного из гидроцилиндров выдвигается, другого - втягивается, осуществляется наклон мачты «вправо» или «влево». При применении в составе гидрораспределителей 3 и 4 асимметричных золотников данные наклоны будут осуществляться без одновременного смещения мачты «вперед» или «назад».
Помимо описанных выше вариантов перемещения мачты, возможны также ее движения, обусловленные одновременной активацией соседних положений блока управления: «a» и «c», «a» и «d», «c» и «b», «d» и «b». Все это многообразие положений блока управления позволяет позиционировать мачту по кратчайшему расстоянию с любым необходимым ее наклоном в двух плоскостях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД, ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2010 |
|
RU2449942C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ УСТАНОВКИ С КАЧАЮЩЕЙСЯ ЧАСТЬЮ | 2015 |
|
RU2629763C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНЫМ ЭЛЕМЕНТОМ | 2014 |
|
RU2570679C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ЛЮКОВОГО ЗАКРЫТИЯ | 2008 |
|
RU2364542C1 |
| ГИДРОПРИВОД ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2230020C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО КАНТОВАТЕЛЯ С ПОВОРОТНОЙ ПОДЪЕМНОЙ ПЛАТФОРМОЙ | 2008 |
|
RU2356829C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1998 |
|
RU2148196C1 |
| Устройство для разрушения бетонных покрытий | 1990 |
|
SU1818424A1 |
| ГИДРОСИСТЕМА СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1999 |
|
RU2161254C1 |
Изобретение относится к копрам, применяемым для погружения в грунт свай, обсадных труб и других элементов. Механизм коррекции мачты копра содержит сливную и напорную магистрали, два гидроцилиндра, каждый из которых приводится от трехпозиционного гидрораспределителя, управляющие полости которого соединены с выходами клапанов «или», четырехпозиционный блок управления, выходные каналы которого соединены с входными каналами клапанов «или». Две из позиций блока управления соответствует положению гидрораспределителей, при которых рабочая жидкость из напорной магистрали поступает в поршневую полость одного из гидроцилиндров и в штоковую полость другого гидроцилиндра, а штоковая полость первого гидроцилиндра и поршневая второго соединены со сливной магистралью. Технический результат состоит в обеспечении минимального времени установки мачты в требуемое положение, повышении производительности копровой установки. 3 з.п. ф-лы, 1 ил.
1. Механизм коррекции мачты копра, содержащий сливную и напорную магистрали, два гидроцилиндра, каждый из которых приводится от трехпозиционного гидрораспределителя, управляющие полости которого соединены с выходами клапанов «или», четырехпозиционный блок управления, выходные каналы которого соединены с входными каналами клапанов «или», отличающийся тем, что две из позиций блока управления соответствует положению гидрораспределителей, при которых рабочая жидкость из напорной магистрали поступает в поршневую полость одного из гидроцилиндров и в штоковую полость другого гидроцилиндра, а штоковая полость первого гидроцилиндра и поршневая второго соединены со сливной магистралью.
2. Механизм коррекции мачты копра по п.1, отличающийся тем, что трехпозиционные гидрораспределители имеют компенсаторы давления.
3. Механизм коррекции мачты копра по п.1, отличающийся тем, что трехпозиционные гидрораспределители выполнены асимметричными.
4. Механизм коррекции мачты копра по п.1, отличающийся тем, что в четырехпозиционном блоке управления одновременно активируются две позиции.
| EP 1983147 A2, 22.10.2008 | |||
| ГИДРОПРИВОД УПРАВЛЕНИЯ СТРЕЛОЙ СТРОИТЕЛЬНОЙ МАШИНЫ | 1997 |
|
RU2150553C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМИ ГИДРОЦИЛИНДРАМИ | 1999 |
|
RU2172407C1 |
| SU 11984822 A1, 30.11.1985 | |||
| Гидропривод механизма поворота стрелового самоходного крана | 1985 |
|
SU1324992A1 |

