Изобретение относится к области гидроакустики и радиолокации и может быть применено в автоматических системах вторичной обработки информации радиолокационных и гидроакустических станций, установленных на подвижном носителе.
Одной из задач, решаемой в системе вторичной обработки информации, является снижение вероятности ложной тревоги при принятии решения об обнаружении цели по результатам обнаружения сигналов на фоне помех в приемных каналах, имеющих фиксированную пространственную ориентацию относительно диаметральной плоскости носителя. Известные методы решения данной задачи базируются на использовании результатов последовательной обработки оценок пространственных координат сигнала [Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации // М., издательство «Советское радио», 1974]. Если по результатам траекторией обработки оценок координат на интервале наблюдения за сигналом, начиная от момента первичного обнаружения сигнала и до текущего момента наблюдения, выявлена закономерность (определен закон) изменения координат с необходимой точностью, то принимается решение, что сигнал принадлежит цели класса "истинная", в противном случае - сигнал принадлежит цели класса "ложная". При данном способе отсутствие закономерности в изменении координат (хаотичный характер изменения) характерно только для ложных тревог, т.е. для сигналов, обнаружение которых обусловлено случайным превышением помехой порога, установленного для обнаружения, и не характерно для источников помех с другой природой возникновения, обусловленных, например, движением носителя. Данные источники, в силу фиксированного местоположения относительно конструкции носителя (например, его диаметральной плоскости), вызывают формирование помех, которые в силу своей интенсивности могут быть обнаружены как сигналы, с постоянным значением пространственной координаты "курсовой угол". Подобными источниками являются работающие на носителе механизмы, элементы конструкции носителя, отражающие излученные сигналы, гидродинамические шумы потока обтекания конструкции антенн или аналогичные.
Прототипом предлагаемого способа является способ слежения за одиночной рыбой с подвижной платформы при использовании расщепленного луча, описанный в статье: Nils Olav Handegard, Ruben Patel, Vidar Hjellvik. Tracking individual fish from a moving platform using a split-beam transducer. // J. Acoust. Soc. Am., Vol. 118, No. 4, October 2005, p.2210-2223.
Слежение за одиночными целями с подвижных платформ осложнено незнанием закона движения приемника (например, при его дрейфе), поэтому в прототипе для оценивания движения платформы используется корреляция сигналов от источников, полученных в различных реализациях для нескольких каналов наблюдения, а для получения оценки позиции платформы используется фильтр Калмана.
Недостатком этого способа является то, что оценивание движения приемника невозможно при слежении за сигналами, перемещающимися в пространстве синхронно с движением платформы, т.е. источник которых конструктивно связан с мобильной платформой.
Задачей изобретения является снижение вероятности ложной тревоги при обнаружении источников сигналов (целей) гидроакустическими и радиолокационными станциями, установленными на движущихся мобильных носителях, за счет обеспечения возможности распознавания источников сигналов, порожденных движением носителя, как ложных.
Для решения поставленной задачи используется способ, основанный на вычислении корреляционной функции между совокупностью значений курса носителя и курсовым углом на обнаруженную цель, измеренных на интервале наблюдения. Носитель приемной гидроакустической системы с целью удержания заданного направления движения в пространстве осуществляет колебательные движения относительно направления генерального перемещения, противодействуя внешним возмущающим воздействиям (выполняет так называемое рысканье по курсу).
При изменении курса носителя (угла между направлением на север и направлением диаметральной плоскости носителя) по этому же закону, но с противоположным знаком, изменяется и курсовой угол на истинную цель (угол между направлением диаметральной плоскости и направлением на цель), при этом курсовой угол на ложную цель, обусловленную сигналами от носителя, будет постоянным и не коррелирован с колебаниями курса носителя. По уровню статистической взаимосвязи этих процессов принимается решение принадлежности наблюдаемой цели к классу "истинная" или "ложная".
Вышеуказанная задача решается за счет учета в системе дополнительной информации о параметрах движения носителя радиолокационных и гидроакустических станций - мгновенном значении курса движения.
Сущность предложенного способа поясняется фигурой 1, на которой изображена функциональная схема устройства, реализующего данный метод распознавания. В результате работы системы траекторией обработки 1, на первый вход коррелятора 3 поступает измеренная на интервале времени наблюдения за целью совокупность оценок курсовых углов на источник сигнала (цель). От навигационной системы 2 на второй вход коррелятора 3 поступает совокупность оценок курса движения носителя, измеренных синхронно по времени с оценками курсовых углов на источник сигнала, на интервале его наблюдения. В корреляторе 3 вычисляется корреляционная функция для совокупности значений курсового угла носителя на цель и курса носителя на интервале времени наблюдения от tн до tтек
где
tн - начало времени измерения курсового угла на источник сигнала;
tтек - текущее время наблюдения;
qi - оценка курсового угла на цель, измеренная в ti-й момент времени, ti∈[tн, tтек];
ki - оценка курса носителя, измеренная в ti-й момент времени;
L - число измерений курсового угла на цель и курса носителя на интервале времени наблюдения от tн до tтек.
Для целей, обусловленных сигналами от носителя, коэффициент корреляции с ростом времени наблюдения (размера выборки) будет стремиться к нулю, а для истинных целей коэффициент корреляции будет стремиться к значению дисперсии курса носителя со знаком минус (поскольку изменения курсового угла на истинную цель и курса носителя противоположно направлены). Оценка дисперсии курса носителя σk по массиву оценок, накопленному на интервале наблюдения от tн до tтек, выполняется в блоке оценки дисперсии 4
Оценка дисперсии курса носителя с выхода блока оценки дисперсии 4 поступает на первый вход компаратора 5, на второй вход компаратора 5 поступает оценка коэффициента корреляции с выхода коррелятора 3. В компараторе 5 производится сравнение двух величин, по результатам сравнения принимается решение о классе цели:
- если K<-σk - цель относится к классу "истинная",
- если K>-σk, - цель относится к классу "ложная".
Предлагаемый способ позволяет отличить ложные цели, вызванные сигналами от движущегося носителя, от прочих целей, расположенных вне носителя. Таким образом, задачу изобретения можно считать решенной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2017 |
|
RU2653956C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ПОДВИЖНОЙ ЦЕЛИ ПРИ СГЛАЖИВАНИИ В ДЕКАРТОВЫХ КООРДИНАТАХ С УЧЕТОМ ИЗМЕРЕНИЙ РАДИАЛЬНОЙ СОСТАВЛЯЮЩЕЙ СКОРОСТИ | 2019 |
|
RU2724115C1 |
| ОДНОПОЗИЦИОННЫЙ ПАССИВНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС ДЛЯ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНЫХ КООРДИНАТ, ЭЛЕМЕНТОВ ДВИЖЕНИЯ ЦЕЛИ И КОЭФФИЦИЕНТА КИЛОМЕТРИЧЕСКОГО ЗАТУХАНИЯ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ЦЕЛИ | 2014 |
|
RU2586078C2 |
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ ПО КОРРЕЛЯЦИОННОМУ ПРИЗНАКУ | 2019 |
|
RU2743027C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2019 |
|
RU2715409C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ОБЪЕКТА НА ЛИНЕЙНОЙ ТРАЕКТОРИИ С ИСПОЛЬЗОВАНИЕМ ИЗМЕРЕНИЙ ЕГО РАДИАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2714884C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ОБЪЕКТА НА ЛИНЕЙНОЙ ТРАЕКТОРИИ С ИСПОЛЬЗОВАНИЕМ ВЫБОРОК КВАДРАТОВ ДАЛЬНОСТИ | 2020 |
|
RU2753615C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ МАНЕВРИРУЮЩЕГО ОБЪЕКТА | 2001 |
|
RU2196341C1 |
Изобретение относится к областям гидроакустики и радиолокации и может быть применено в автоматических системах вторичной обработки радиолокационных и гидроакустических станций, установленных на подвижном носителе. В нем рассматривается способ снижения вероятности ложной тревоги за счет повышения эффективности классификации ложных целей, вызванных собственными шумами носителя. Сущность способа состоит в том, что при классификации ложных целей используется дополнительный статистический критерий - коэффициент корреляции между курсом носителя и курсовым углом на цель. Для ложных целей, обусловленных собственными шумами носителя, коэффициент корреляции с ростом размера выборки будет стремиться к нулю, а для истинных целей коэффициент корреляции будет стремиться к значению дисперсии курса носителя со знаком минус (так как изменения курсового угла на истинную цель и курса носителя противоположно направлены). Техническим результатом изобретения является снижение вероятности ложной тревоги за счет использования дополнительной информации о параметрах движения носителя станции. 1 ил.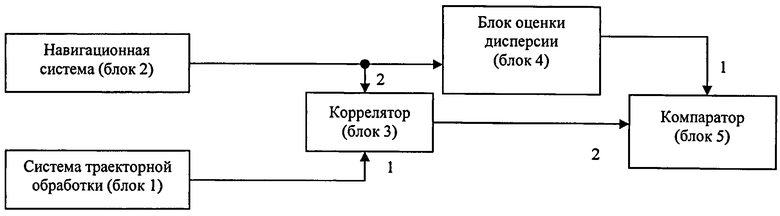
Способ распознавания целей на классы "истинная" и "ложная", заключающийся в том, что для принятия решения о классе цели применяется корреляционная обработка совокупности значений курсового угла на цель и курса движущегося носителя, синхронно измеренных на интервале наблюдения, отличающийся тем, что дополнительно вычисляется значение коэффициента корреляции между совокупностью значений курса носителя и курсового угла на цель, производится сравнение значения коэффициента корреляции со значением дисперсии курса носителя, взятого со знаком минус, и принимается решение о принадлежности цели классу "ложная", если значение коэффициента корреляции превышает значение дисперсии курса носителя, взятого со знаком минус, в противном случае принимается решение о принадлежности цели классу "истинная".
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| УСТРОЙСТВО КЛАССИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ДВИЖЕНИЯ | 2009 |
|
RU2416106C2 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНОГО РАДИОЛОКАЦИОННОГО ОБЪЕКТА НАБЛЮДЕНИЯ С ВЫБОРОМ ИНТЕРВАЛА МАКСИМИЗАЦИИ УГЛОВОЙ СКОРОСТИ ЕГО ПОВОРОТА ПРИ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЯХ ДВИЖЕНИЯ | 2010 |
|
RU2427001C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2079857C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Устройство для непрерывного получения раствора из быстро твердеющих вяжущих | 1947 |
|
SU76464A1 |
| УСТРОЙСТВО ЛОГИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1998 |
|
RU2149420C1 |
| СПОСОБ СЕЛЕКЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 1995 |
|
RU2083996C1 |
| US20090073027 A1, 19.03.2009 | |||
| US2007159379 A1, 12.07.2007 | |||

