Изобретение относится к области гидроакустики и может быть использовано для обеспечения обнаружения и оценки текущих координат морских объектов в заданных районах мирового океана.
При обнаружении в процессе гидролокации эхосигнала от подводного объекта гибкой протяженной буксируемой антенной (ГПБА), представляющей собой линейную антенну ненаправленных преобразователей, возникает неопределенность угла прихода эхосигнала в горизонтальной плоскости - слева или справа от оси антенны (неопределенность борта). Такой эффект обусловлен тем, что линейная антенна симметрична относительно своей оси [Смарышев М.Д. Направленность гидроакустических антенн. Л.: Судостроение. 1973].
В настоящее время для снятия неопределенности борта необходимо проведение собственного маневра носителя, который в реальных условиях не всегда допустим, что ведет к невозможности снять неоднозначность определения пеленга цели [Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. СПб.: Наука, 2004, с. 188-191].
Известны гидроакустические станции с ГПБА (журнал "Судостроение за рубежом", №10, 1984 г. Гидроакустические системы с ГПБА, авторы А.А. Гурвич, Н.М. Гусев, Г.В. Яковлев, стр. 34), включающие в себя гибкую протяженную буксируемую антенну, систему уплотнения и передачи сигналов, систему разуплотнения и первичной обработки сигналов, систему индикации и регистрации данных.
Для решения задачи обнаружения целей в кормовых углах обзора используется полная активная длина ГПБА, обеспечивающая обнаружение и пеленгование в узком кормовом секторе. Для формирования характеристики направленности применяется устройство компенсации фазового сдвига, представляющее собой линию задержки и суммирования сигналов от предварительных усилителей с целью формирования продольной характеристики направленности в узком кормовом секторе. При этом возникает неоднозначность определения пеленга в горизонтальной плоскости, что является существенным недостатком таких систем. Эта неоднозначность устраняется путем специального маневрирования корабля-носителя ГПБА, что требует весьма большого времени для восстановления рабочего положения антенны после маневра корабля-носителя, определения пеленга на шумящую цель и построения графика курса (около 10-15 мин).
Другим аналогом к заявленному предмету изобретения является способ, который применен в гидроакустической станции с ГПБА по патенту США №4173148, 1978 г., на «Комбинацию всенаправленной и двунаправленной антенны, однонаправленный прием в широком диапазоне углов в пространстве» (заявитель - фирма "Сандерс"). В этой станции используется приемная антенна в качестве горизонтально ориентированной системы, буксируемой кораблем или подводной лодкой, содержащая приемники давления и приемники градиента давления, расположенные по длине антенны определенным образом, которая предложена. При этом обеспечивается формирование характеристик направленности пространственных каналов антенны в виде кардиоиды и тем самым устраняется неоднозначность пеленгования акустических сигналов шумящих объектов.
Недостатком таких систем является то, что неоднозначность пеленгования удается устранить только в траверзном и близких к траверзному направлениях. Что касается кормового сектора, то неоднозначность пеленгования не устраняется, так как по своей форме кардиоида не обеспечивает пространственного разрешения в кормовых углах.
Известен способ, обеспечивающий однозначность пеленгования в кормовом секторе [Патент СССР 1840459. Шумопеленгаторная станция. Авторы: Гельфман Александр Александрович, Клюшин Виталий Викторович].
Для чего тракт шумопеленгаторной станции с гибкой протяженной антенной содержит вторую гибкую протяженную буксируемую антенну, второе устройство предварительной обработки сигналов и второе устройство аналого-цифрового преобразования и уплотнения информации, второй спектро-анализатор и m-канальный формирователь характеристик направленности, две линии задержки с n-отводами и два n-канальных умножителя, компенсирующих пространственное направление прихода звуковой волны в кормовом секторе. Также определено расстояние между антеннами в горизонтальной плоскости.
Таким образом, вышеупомянутые аналоги предлагаемого изобретения не способны решить задачу однозначного определения направления на цель в кормовом секторе обзора для ГПБА с одной антенной. Для его определения приходится прибегать к процессу длительного маневрирования ПЛ, что тактически и экономически не оправдано, или добавлять вторую гибкую протяженную буксируемую антенну, что усложняет приемную систему.
Авторам неизвестно техническое решение, обеспечивающее снятие неопределенности пеленга при одной линейной буксируемой антенне без длительного маневрирования.
Одним из способов определения координат и параметров движения цели является бистатическая гидролокация, в которой на одном из кораблей располагается излучатель гидролокационного сигнала, прием которого осуществляется на ГПБА другого корабля.
Излучателем может быть любая гидроакустическая антенна корабля, работающая в активном режиме в частотном диапазоне ГПБА.
Известны способы определения дистанции до цели в бистатическом режиме гидролокации при направленной приемной системе, описанные в работах Сташкевич А.П. Акустика моря. Л.: Судостроение, 1966. Сайбель А.Г. Основы теории точности радиотехнических методов местоопределения. М.: Оборонгиз, 1968. Аверьянов В.Я. Разнесенные радиолокационные станции и системы. Минск: Наука и техника. 1978.
Известны способы оценки скорости и курса цели в бистатическом режиме гидролокации по оценкам пеленга и дистанции до цели, приведенные в работе Колесниченко В.В., Соскунова И.А., Школьников И.С., Шутов А.Л. Вопросы точности определения координат и параметров движения цели // Гидроакустика. Вып. 17 (1). 2013. С. 61-72.
Недостатками способа являются:
- неполная исходная информация о параметрах движения цели из-за отсутствия использования доплеровского эффекта, то есть отсутствие использования суммарной относительной радиальной скорости цели, которую можно оценить по сдвигу частоты принятого сигнала, что ведет к снижению точности полученных оценок параметров;
- отсутствие определения борта нахождения цели при приеме на ГПБА.
Известен способ оценки скорости и курса цели в режиме бистатической гидролокации, включающий излучение гидроакустического сигнала неподвижным излучателем, обнаружение отраженного сигнала от цели направленным отнесенным от излучателя неподвижным приемником, определение дистанции до цели и определение скорости и курса цели, в котором измеряются суммарные относительные радиальные скорости цели по изменению частоты сигнала при перемещении объекта по эффекту Доплера и определяются пеленга на цель в два различных момента времени.
Способ описан в работе Шейнман Е.Л., Школьников И.С. Идентификация сигналов и оценка координат объектов, обнаруженных в ненаправленных системах при полистатическом режиме гидролокации // Гидроакустика. 2011. №13. С. 62-67.
Недостатком этого способа является
- использование не всей имеющейся исходной информация о параметрах движения цели из-за отсутствия использования полученных в бистатическом режиме оценок дистанции до цели, что ведет к снижению точности полученных оценок;
- невозможность определения скорости и курса цели для перемещающихся излучателя и приемника;
- невозможность однозначного определения координат нахождения цели при приеме на ГПБА (снятия неопределенности борта).
Задачей предлагаемого изобретения является снятие неопределенности борта при обнаружении цели ГПБА в режиме бистатической гидролокации, при подвижных излучателе и курсе носителя ГПБА, не совпадающем с базой разнесенных излучающей и приемной систем, а также повышение точности оценки скорости и курса.
Техническим результатом от использования изобретения является определение истинных координат цели при обнаружении гибкой протяженной буксируемой антенной (ГПБА) и уменьшение погрешностей оценок скорости и курса цели в режиме бистатической гидролокации кораблей тактической группы.
Для решения поставленной задачи предложен способ определения текущих координат цели в бистатическом режиме гидролокации, включающий излучение гидроакустического сигнала перемещающимся излучателем, обнаружение отраженного сигнала от цели направленной отнесенной от перемещающегося излучателя гибкой протяженной буксируемой антенной (ГПБА), при котором при курсе ГПБА, не совпадающем с направлением базы между перемещающимися фазовым центром ГПБА и излучателем, определяют скорость и курс цели методом, в котором используют полученные в два момента времени оценки прямого и зеркального пеленга и суммарные относительные радиальные скорости цели, измеренные с помощью эффекта Доплера, и методом, в котором используют выработанные в два момента времени оценки прямого и зеркального пеленга и дистанции до цели, определяют расхождение между оценками скорости и курса, полученными обоими методами для прямых и зеркальных пеленгов и дистанций, для пеленга и дистанции, для которых получено минимальное расхождение между полученными оценками, не превышающее пороговое значение, принимают решение, что цель истинная, а при несовпадении оценок цель считают ложной, оценки скорости и курса истинной цели уточняют с учетом неравноточности измерений по двум методам.
Заявленные технические признаки обеспечивают снятие неоднозначности координат цели, так как оценки скорости и курса цели, полученные с использованием различных физических предпосылок, должны совпадать. Уменьшение погрешностей оценок скорости и курса цели в режиме бистатической гидролокации достигается за счет расширения информационной базы, при определении оценок параметров движения цели.
Сущность изобретения поясняется фиг. 1, фиг 2 и фиг 3.
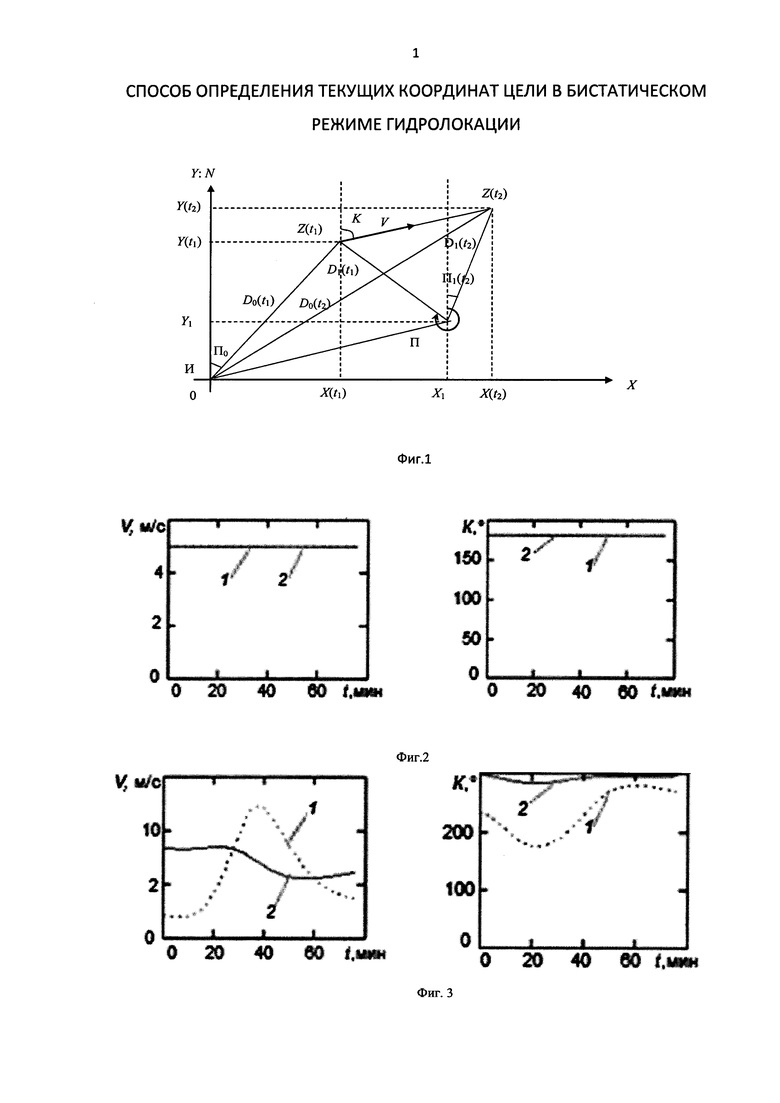
На фиг. 1 приведена схема распространения сигнала для истинной цели при разнесенном излучении (источник сигнала И) и направленном приеме (приемник сигнала П, совпадающий с фазовым центром ГПБА). Для зеркальной цели схема аналогична.
На фиг. 2 приведены математические ожидания оценок скорости и курса цели, полученные двумя методами для истинной цели, на фиг. 3 - для зеркальной цели.
Реализация способа осуществляется следующим образом: излучателем (И), установленным на одном из кораблей тактической группы, излучают зондирующий сигнал, отраженный от цели сигнал принимают ГПБА (П) (фиг. 1), буксируемой за другим кораблем-носителем тактической группы, при курсе ГПБА, не совпадающем с направлением базы между перемещающимися фазовым центром ГПБА и излучателем. В тракте обнаружения ГПБА определяют в моменты времени t1 и t2 прямой (П0(t1), П0(t2)), а также зеркальный пеленг цели (П0з(t1), П0з(t2)) и измеряют частоту принятого сигнала. По разнице частот излученного и принятого сигнала с использованием эффекта Доплера определяют суммарную относительную радиальную скорость цели и носителя VrΣ(t1), VrΣ(t2). По этим пеленгам рассчитывают прямую и зеркальную дистанцию до цели по формуле (1).
Расчет скорости и курса производят двумя методами в одни и те же моменты времени. Рассчитывают для прямого и зеркального пеленгов скорость V и курс K цели методом эффекта Доплера по формулам (2, 3) и методом, в котором используют выработанные в два момента времени оценки прямого и зеркального пеленга и дистанции до цели, по формулам (3, 4). Отдельно для прямого и отдельно для зеркального пеленга определяют расхождения значений между оценками скорости и курса, полученными по двум методам по формуле (6). Для того пеленга, для которого расстояние между оценками обоих параметров, полученных в двух методах, меньше заданного порогового значения, цель считается истинной, для второго пеленга - цель считается ложной и ее отбрасывают. Для истинной цели вырабатываются уточненные по двум методам оценки скорости и курса и оценки их погрешностей по формуле (6).
На фиг. 1 ось Y совпадает с направлением на север. Центр системы координат совмещен с положением излучателя зондирующего сигнала (И), находящегося в координатах (X0, Y0). Приемная система П - фазовый центр ГПБА - имеет известные координаты (X1, Y1) и (X2, Y2), в которых принят эхосигнал. Z(ti) - цель в момент времени ti. i=1, 2 - первый и второй отсчеты времени, D0(ti) и D1(ti) - расстояния в момент времени ti между излучателем и целью и между целью и фазовым центром ГПБА соответственно. П0(ti) и П1(ti) - пеленг на цель с излучателя и с ГПБА соответственно в момент времени ti. Пи(ti) - пеленг на излучатель с ГПБА соответственно в момент времени ti. V и K - скорость и курс цели соответственно, L - расстояние между излучателем и ГПБА соответственно. V0, K0, Vпр, Kпр - скорость и курс излучателя и ГПБА соответственно.
Дистанция до обнаруженной цели в ГПБА рассчитывается по формуле:
 ,
,
где α угол между отрезками «излучатель-приемник (ГПБА)» и «цель-приемник (ГПБА)»

Здесь Пи(ti), П1(ti) соответственно пеленг на излучатель и пеленг на цель относительно ГПБА (прямой или зеркальный).
R Σ=(tпр-tои)⋅C,
где RΣ(ti) - сумма расстояний «излучатель-цель» и «цель-ГПБА» в момент времени ti; tпр - время приема сигнала; tои - время окончания излучения сигнала.
Оценки параметров движения цели рассчитывают следующим образом.
Оценки скорости и курса с использованием эффекта Доплера определяются как решение системы уравнений для суммарной относительной скорости, полученной в два момента времени t1 и t2:
Vr Σ(t1)=V cos(К-Ппр(t1))+V cos(К-П0(t1))+V0 cos(К0-П0(t1))+Vпр cos(Кпр-Ппр(t1));
Vr Σ(t2)=V cos(К-Ппр(t2))+V cos(К-П0(t2))+V0 cos(К0-П0(t2))+Vпр cos(Кпр-Ппр(t2));
Vr Σ(ti) - суммарная относительная радиальная скорость цели, измеряемая в бистатическом режиме с помощью эффекта Доплера в момент времени ti; которая представляет собой сумму радиальных относительных скоростей: излучатель - цель и цель - приемник [Сташкевич А.П. Акустика моря. Л.: Судостроение, 1966. Сайбель А.Г. Основы теории точности радиотехнических методов местоопределения. М.: Оборонгиз, 1968. Аверьянов В.Я. Разнесенные радиолокационные станции и системы. Минск: Наука и техника. 1978].
Пеленг на цель излучающей системы может быть известен, если цель обнаружена в режиме моностатической гидролокации в излучающей системе или определен по информации тракта обнаружения ГПБА с использованием пеленга на цель ГПБА и оценки дальности до цели в ГПБА.
В этом случае пеленг на цель излучающей системы определяется по формуле:

где

Оценки скорости и курса цели определяются по формуле:


где
A(t1)=VrΣ(t1)-V0 cos(К0-П0(t1))-Vпр cos(Кпр-Ппр(t1))
A(t2)=VrΣ(t2)-V0 cos(К0-П0(t2))-Vпр cos(Кпр-Ппр(t2))
B(t1)=cosПпр(t1)+cosП0(t1), B(t2)=cosПпр(t2)+cosП0(t2)
C(t1)=sinПпр(t1)+sinП0(t1), C(t2)=sinПпр(t2)+sinП0(t2)
При оценке скорости и курса цели по динамике изменения пеленга и дистанции до цели без использования эффекта Доплера оценки этих параметров вырабатываются по формулам:


Погрешности рассчитываемых параметров определяются методом линеаризации [Вентцель Е.С. Теория вероятностей. М.: Наука, 1969]:
где xi - случайные величины, характеризующие параметр,
ϕ - функция, описывающая параметр.
Для каждой из оценок скорости и курса определяется минимальное расхождение между оценками, полученными по двум методам по формуле:

Здесь xji и  - полученные для прямого пеленга (зеркального) в i-м методе значения j-го параметра и его среднеквадратические погрешности.
- полученные для прямого пеленга (зеркального) в i-м методе значения j-го параметра и его среднеквадратические погрешности.
Оценки координат и параметров движения цели, для которых выполняется это неравенство, считаются истинными и оценки скорости и курса j-го параметра уточняются с учетом неравноточности измерения по формулам:

Таким образом, введение новых признаков позволяет снять неопределенность борта на ГПБА и уменьшить погрешность оценки скорости и курса цели за счет использования методов оценки параметров, основанных на различных физических предпосылках.
Достижение истинного направления на цель с помощью предложенного способа подтверждается приведенными ниже результатами расчетов.
Расчеты проводились для двух вариантов движения цели: цель движется на излучатель и цель движется перпендикулярно начальному направлению на цель (по касательной). Начальные координаты излучателя - (X,Y)0=(0,0), координаты фазового центра ГПБА - (X,Y)1=(5,0) км, координаты цели - (0,20) км, курсовой угол цели - 272° и 181°, скорость цели 6 м/с, шаг по времени Δt=300 c. Среднеквадратическая погрешность оценки дистанции 1% от дистанции и 1° для пеленга.
Параметры движения излучателя - K=90°, V=6 м/с.
Параметры движения ГПБА - K=30°, V=4 м/с.
На фиг. 2 приведены оценки скорости и курса для истинной цели, а на фиг. 3 оценки скорости и курса для зеркальной цели при К=181°, V=5 м/c, полученные по двум методам. На фиг. 2 и фиг. 3 использовались следующие обозначения: 1 - метод расчета с использованием эффекта Доплера, 2 - алгоритм, использующий изменения пеленга и дистанции.
В обоих случаях математические ожидания оценок скорости и курса цели, полученные двумя методами, для истинного пеленга совпадали (Фиг. 2), для зеркального пеленга различались на величину от 0 до 6 и от 15° до 110° для скорости и курса соответственно, причем в тех точках, в которых наблюдалось совпадение одного из параметров, другой параметр различался значительно (Фиг. 3).
При решении, что цель истинная, по оценкам скорости и курса, полученным по двум методам, можно уточнить оценки параметров. Для этого было проведено сравнение эффективности двух методов.
Показано, что в случае, когда цель движется на излучатель, наблюдается сильное изменение дистанции и малое изменение пеленга, когда цель движется перпендикулярно начальному направлению на цель, наблюдается малое изменение дистанции и большое изменение пеленга. Соответственно в первом случае было получено, что эффективнее метод с использованием эффекта Доплера, во втором случае эффективнее метод, использующий информацию об изменении пеленга и дистанции. В промежуточном варианте движения эффективность этих двух методов близка, что позволяет уточнить полученные оценки параметров.
В прототипе максимальные погрешности оценок параметров скорости и курса достигали величин соответственно σV=1.1 м/с, σK=75° в первом варианте движения (при К=181°) и σV=2.5 м/с, σK=4° во втором варианте движения (при К=272°).
В предлагаемом способе, с учетом уточнения параметров, максимальные погрешности оценок параметров скорости и курса достигали в первом варианте расчета величин σV=0.7 м/с и σK=8° соответственно, во втором σV=0.8 м/c, σK=3.5°.
Таким образом, для рассмотренного примера предложенный способ обеспечивает выигрыш в величине среднеквадратической погрешности оценок, равный 0.4 м/с и 67° для первого варианта движения и 1.7 м/с и 0.5° для второго варианта движения.
Кроме того, предложенный способ позволяет снять неопределенность борта цели для ГПБА при курсе ГПБА, не совпадающем с базой разнесенных систем.
Таким образом, на основании приведенного примера можно считать, что заявленный технический результат, заключающийся в определении истинных координат цели при обнаружении гибкой протяженной буксируемой антенной (ГПБА) и уменьшении погрешностей оценок скорости и курса цели, достигнут.
Источники информации
1. Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. СПб.: Наука, 2004, с. 188-191.
2. Андреев М.Я., Клюшин В.В., Охрименко С.Н. Белых В.Д. Гидроакустические станции с гибкими протяженными буксируемыми антеннами для ведения гидроакустической разведки и освещения подводной обстановки… / Гидроакустика №6. СПб. 2006. С 3-7.
3. Сташкевич А.П. Акустика моря. Л.: Судостроение, 1966.
4. Сайбель А.Г. Основы теории точности радиотехнических методов местоопределения. М.: Оборонгиз, 1968.
5. Аверьянов В.Я. Разнесенные радиолокационные станции и системы. Минск: Наука и техника. 1978.
6. Шейнман Е.Л., Школьников И.С. Идентификация сигналов и оценка координат объектов, обнаруженных в ненаправленных системах при полистатическом режиме гидролокации // Гидроакустика. 2011. №13. С. 62-67.
7. Вентцель Е.С. Теория вероятностей. М.: Наука, 1969.
8. И.В. Матвеева, Е.Л. Шейнман, И.С. Школьников. Эффективность определения параметров движения морских объектов при бистатической локации перемещающихся систем наблюдения. // Гидроакустика. 2016. №26. С. 28-32.
9. А.А. Гурвич, Н.М. Гусев, Г.В. Яковлев. Гидроакустические системы с ГПБА // Судостроение за рубежом", №10, 1984 г., стр. 34.
10. Комбинация всенаправленной и двунаправленной антенны; однонаправленный прием в широком диапазоне углов в пространстве. Патент США №4173148, 1978 г.
11. Шумопеленгаторная станция. Патент СССР 1840459.
12. Колесниченко В.В., Соскунова И.А., Школьников И.С., Шутов А.Л. Вопросы точности определения координат и параметров движения цели // Гидроакустика. Вып. 17 (1) 2013. С. 61-72.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2019 |
|
RU2715409C1 |
| Способ определения координат и параметров движения подводных объектов при мультистатической гидролокации | 2024 |
|
RU2830066C1 |
| Гидроакустический способ определения параметров движения цели в режиме шумопеленгования | 2023 |
|
RU2814151C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА ПО ИЗМЕРЕНИЯМ УГЛОВЫХ КООРДИНАТ | 2016 |
|
RU2608583C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| Способ измерения шумности подводного аппарата | 2023 |
|
RU2801077C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ОЦЕНКИ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ | 2012 |
|
RU2516594C1 |
| СПОСОБ ТЕЛЕУПРАВЛЯЕМОГО НАВЕДЕНИЯ ПОДВОДНОГО АППАРАТА | 2018 |
|
RU2700827C1 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681526C1 |
Изобретение относится к области гидроакустики и может быть использовано для обеспечения обнаружения и оценки текущих координат морских объектов в заданных районах мирового океана. Техническим результатом от использования изобретения является: определение истинных координат цели, обнаруженной гибкой протяженной буксируемой антенной (ГПБА), снятие неопределенности борта цели и уменьшение погрешностей оценок скорости и курса цели. Для этого в способе определения текущих координат цели в бистатическом режиме гидролокации, включающем излучение гидроакустического сигнала излучателем, обнаружение отраженного сигнала от цели направленным отнесенным от излучателя приемником, определение дистанции до цели и определение скорости и курса цели с использованием эффекта Доплера, определяют при перемещающемся излучателе гидроакустического сигнала и обнаружении отраженного сигнала от цели перемещающимся приемником в виде гибкой протяженной буксируемой антенны (ГПБА), при курсе ГПБА, не совпадающем с направлением базы между разнесенными излучателем и ГПБА, прямой и зеркальный пеленги и прямую и зеркальную дистанции, определяют скорость и курс цели дополнительно методом, использующим выработанные оценки пеленга и дистанции до цели, определяют расхождение между оценками скорости и курса, полученными обоими методами для прямых и зеркальных пеленгов и дистанций, для пеленга и дистанции, для которых получено минимальное расхождение между полученными оценками, не превышающее пороговое значение, принимают решение, что цель истинная, а при несовпадении оценок цель считают ложной, оценки скорости и курса истинной цели уточняют с учетом неравноточности измерений по двум методам. 3 ил.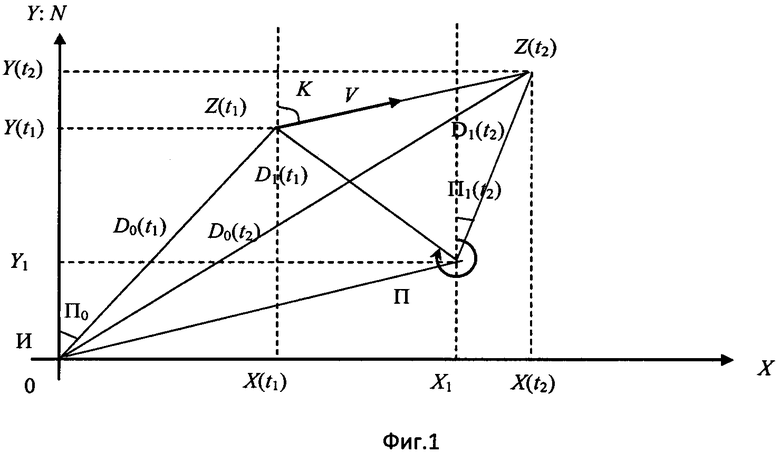
Способ определения текущих координат цели в бистатическом режиме гидролокации, включающий излучение гидроакустического сигнала перемещающимся излучателем, обнаружение отраженного сигнала от цели направленной отнесенной от перемещающегося излучателя гибкой протяженной буксируемой антенной (ГПБА), при котором при курсе ГПБА, не совпадающем с направлением базы между перемещающимися фазовым центром ГПБА и излучателем, определяют скорость и курс цели методом, в котором используют полученные в два момента времени оценки прямого и зеркального пеленга и суммарные относительные радиальные скорости цели, измеренные с помощью эффекта Доплера, и методом, в котором используют выработанные в два момента времени оценки прямого и зеркального пеленга и дистанции до цели, определяют расхождение между оценками скорости и курса, полученными обоими методами для прямых и зеркальных пеленгов и дистанций, для пеленга и дистанции для которых получено минимальное расхождение между полученными оценками, не превышающее пороговое значение, принимают решение, что цель истинная, а при несовпадении оценок цель считают ложной, оценки скорости и курса истинной цели уточняют с учетом неравноточности измерений по двум методам.
| Способ получения безуглеродистого феррохрома | 1959 |
|
SU137126A1 |
| СПОСОБ СИНХРОНИЗАЦИИ ФУНКЦИЙ ИЗЛУЧЕНИЯ И ПРИЕМА В БИСТАТИЧЕСКОМ ГИДРОЛОКАТОРЕ | 2013 |
|
RU2535238C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2195683C2 |
| СИСТЕМА АКТИВНОЙ ГИДРОЛОКАЦИИ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ | 2009 |
|
RU2393503C1 |
| А.А | |||
| Илларионов и др | |||
| Экспериментальная оценка бистатической силы цели сложных объектов при различных видах зондирующих сигналов | |||
| Известия ЮФУ | |||
| Технические науки | |||
| Счетная линейка для вычисления объемов земляных работ | 1919 |
|
SU160A1 |

