Изобретение относится к области радиолокации, а именно к радиолокационным станциям (РЛС) с режимом пассивного обнаружения, установленным на одиночных носителях (надводные и подводные корабли, береговые наблюдательные пункты и т.д.), и может быть использовано для определения горизонтальных координат и элементов движения излучающих целей при неизвестном значении коэффициента километрического затухания электромагнитного излучения цели в среде распространения радиоволн.
Цель изобретения - повышение точности и быстродействия однопозиционного определения горизонтальных координат (ГК) и элементов движения цели (ЭДЦ) путем применения дополнительных аппаратных средств для адаптации оценки ГК ЭДЦ однопозиционным пассивным радиоэлектронным комплексом (ОПРЭК) к определенным значениям ККЗ в среде распространения электромагнитного излучения (радиоволн) цели, при соблюдении скрытности работы.
Уровень техники
Известен способ измерения расстояния и устройство для его осуществления (варианты) по Патенту РФ №2408842, 2009 г., МПК G01C 3/08; G01S 17/48, опубл. 10.01.2011 г. [1].
Сущность способа заключается в следующем. На объект направляют зондирующее излучение, генерируемое источником излучения, регистрируют отраженное от объекта излучение фотоприемными средствами и определяют расстояние до объекта L по формуле L=b/tg φ, где b - база триангуляции, а φ - угол триангуляции между осью зондирующего излучения и направлением на фотоприемник отраженного от объекта излучения. До регистрации отраженного излучения фотоприемными средствами осуществляют его задержку в световоде за счет отражения излучения от внутренней поверхности световода, при этом входная апертура световода находится на расстоянии b относительно направления зондирующего излучения. Угол φ определяют по времени Δt распространения в световоде отраженного от объекта излучения различными вариантами.
Варианты устройства содержат источник зондирующего излучения, фотоприемные средства регистрации отраженного от объекта излучения, которые связаны со средствами обработки сигнала. Кроме того, устройство снабжено световодом для задержки отраженного от объекта излучения. При этом в первом варианте устройства средства обработки сигнала снабжены средствами измерения временных интервалов, а во втором варианте - дополнительно содержатся фотоприемные средства регистрации отраженного излучения, которые выполнены в виде первого фотоприемника, размещенного у выходной апертуры световода и второго фотоприемника, расположенного в плоскости выходной апертуры источника зондирующего излучения и входной апертуры световода. Между источником зондирующего излучения и фотоприемниками, с одной стороны, и объектом, с другой стороны, размещен оптический модулятор. В свою очередь, средства обработки сигнала включают усилитель, подключенный входом к выходу первого фотоприемника, а вторым входом - к выходу второго фотоприемника, инвертор, частотомер и блок обработки сигнала, подключенный к выходу частотомера, причем вход инвертора связан с выходом усилителя, его первый выход - с входом блока управления источником зондирующего излучения, а его второй выход - с входом частотомера.
Недостатками известного способа являются использование демаскирующего зондирующего излучения для измерения дистанции, а также базы триангуляции, которая должна быть известна.
Известен способ определения параметров движения маневрирующего объекта по Патенту РФ №2196341, 2001 г., МПК G01S 3/80; G01S 11/14, опубл. 10.01.2003 г. [2].
Способ основан на приеме акустического шумового сигнала маневрирующего объекта, сближающегося с движущимся наблюдателем по траектории, на которой его вектор скорости непрерывно направлен на наблюдателя, гидроакустической антенной наблюдателя, преобразовании акустического шумового сигнала в электрический, автоматическом сопровождении маневрирующего объекта по углу, его классификации и последовательном измерении курсовых углов П1, П2 … Пi на маневрирующий объект через заданные интервалы ti определения собственной скорости наблюдателя Vн из массива скоростей объекта того класса, по которому классифицирован маневрирующий объект, выборе одного из возможных значений скорости V0 маневрирующего объекта, расчете начального значения дистанции Д1 и текущего значения дистанции Дi, расчете на i-й момент времени значения курсового угла Прасч.i, сравнении значений Пi и Прасч.i и, если модуль разности |Пi-Прасч.i| равен или меньше заданного значения, считают выбранную скорость маневрирующего объекта и рассчитанную дистанцию Дi до него истинными, при ином результате сравнения из массива возможных скоростей объекта данного класса выбирают другое значение скорости маневрирующего объекта и повторяют процедуру расчетов до выполнения заданного условия для модуля разности расчетного и измеренного значений курсовых углов.
Известный способ может быть использован для определения параметров движения объекта, сближающегося с наблюдателем по криволинейной траектории, и обеспечивает возможность работы в пассивном режиме гидроакустической станции (ГАС) без осуществления собственного маневра носителя ГАС.
Недостатками известного способа является малая точность и недостаточная скорость определения параметров движения объекта, обусловленные использованием при решении задачи априорного знания о скорости движения объекта. Кроме того, процедура определения скорости и дистанции представляет собой алгоритм перебора со случайными входными параметрами и для уменьшения вариантов перебора возможных значений скоростей и расстояний до объекта, предполагает знание класса объекта, который не всегда известен.
Известен пассивный радиоэлектронный комплекс (ПРЭК) для однопозиционного определения горизонтальных координат и элементов движения объекта методом линейной фильтрации Калмана-Бьюси по патенту РФ на полезную модель №112446, МПК G01S 11/12, G01S 5/00, 2011 г., опубл. 10.01.2012 г., Бюл. №1 [3].
Известный комплекс содержит антенну (антенну ОПРЭК*,*) - здесь и далее название в заявляемом комплексе), блок обнаружения радиолокационного сигнала, блок сопровождения сигнала по пеленгу (блок слежения за радиолокационными сигналами*), блок измерения параметров сигнала и пеленгов (блок измерения пеленгов на цель* и блок измерения мощности сигналов от цели*), блок статистической оценки начального пеленга (По), начальной величины изменения пеленга (ВИПо) и начальной величины изменения расстояния (ВИРо) [блок построения начального вектора состояния (НВС) По, ВИПо, ВИРо и дистанции до цели в начальный момент времени (D0) в каждом фильтре ККЗ*], блок построения множества фильтров Калмана (блок параллельной реализации фильтров Калмана для оценивания вектора состояния с заданным в каждом фильтре ККЗ*), блок оценки дистанции до объекта и элементов движения объекта (ЭДО) [блок вычисления текущих координат цели - пеленга и дистанции (Пt и Dt) и ЭДЦ - скорости и курса (Vt и Кt)*], экран (блок выдачи информации на экран*) и блок освещения текущей обстановки.
Известный комплекс работает следующим образом.
Антенна непрерывно принимает излучение от объекта, сигналы обрабатываются блоком обнаружения радиолокационного сигнала и поступают в блок измерения параметров сигнала и пеленгов, полученные значения пеленгов поступают в блок сопровождения сигнала по пеленгу, в котором формируется последовательность пеленгов, необходимая для получения статистических оценок По, ВИПо и ВИРо в блоке статистической оценки По, ВИПо и ВИРо, полученные оценки совместно с измеренными уровнями сигналов позволяют в блоке построения множества фильтров Калмана построить множество фильтров Калмана для получения оценок координат и ЭДО в блоке оценки дистанции до объекта и ЭДО, на основании полученных координат, которые отображаются на экране, формируются данные в блоке освещения текущей обстановки для принятия оперативного решения.
Сущность работы известного комплекса заключается в пассивном измерении горизонтальных координат движущегося объекта при оценивании изменения уровня принимаемого сигнала в процессе наблюдения и пеленга на цель при помощи ПРЭК и справедливо для объектов, работающих в сантиметровом диапазоне длин волн, по измеряемому пеленгу вычисляют начальные значения трехмерного вектора состояний цели, содержащего пеленг (П), величину изменения пеленга (ВИП), величину изменения расстояния (ВИР), которые после измерения мощности сигнала позволяют сформировать четырехмерный вектор состояния объекта, содержащий, кроме трех указанных величин, еще и дистанцию до объекта, в процессе дальнейшего измерения пеленга на объект и мощности сигнала с помощью фильтра Калмана определяют координаты и ЭДО для плоской задачи.
Недостатком известного комплекса являются малые точность и быстродействие, обусловленные невозможностью решения задачи в условиях параметрической неопределенности параметра δ - коэффициента километрического затухания, характеризующего влияние изменения окружающей среды (атмосферы, приводного слоя и т.д.) на прохождение электромагнитного излучения (радиосигнала) цели.
Решаемой задачей является повышение точности и быстродействия работы применением дополнительных аппаратных средств (блока получения априорных значений δ и плотностей вероятности δ, блока определения априорных значений δi и плотностей вероятности δi для каждого фильтра с номером i, блока вычисления значений апостериорных вероятностей случайной дискретной величины в каждом фильтре с номером i и блока взвешенного суммирования оценок вектора состояния всех фильтров δi) для обеспечения использования адаптивного метода «разделенного» оценивания вектора состояния Х(δ) и параллельной реализации n фильтров Калмана, каждый из которых независимо от остальных решает задачу оценки вектора состояния X(δi), в условиях параметрической неопределенности параметра δi - коэффициента километрического затухания, с последующим суммированием взвешенных оценок X(δi), где i=1, 2, 3, … n.
Раскрытие изобретения
Задачи оптимального оценивания в условиях параметрической неопределенности модели требуют применения специальных адаптивных методов, в частности метода разделенного оценивания, использующего байесовский подход построения оценок и требующего дополнительных аппаратных средств.
Введем обозначение, указывающее на параметрическую неопределенность соответствующей модели.

где Х - вектор состояний;
П0 - пеленг в начальный момент времени;


D0 - дистанция до объекта в начальный момент времени.
Параметр δ, как этого требует байесовский подход, предполагается случайной переменой с заданным априорным распределением плотностей вероятностей р (δi) на конечном числе точек i=1, 2, 3, … n значений параметра δ.
В результате уравнения адаптивной оценки вектора состояния Х(δ) принимают вид:
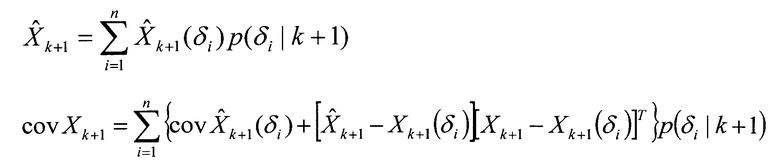
где 
cov Xk+1(δi) - ковариационная матрица ошибки оценки вектора состояния Х(δi) в k+1 момент времени;
р(δi |k+1) - значение апостериорной вероятности случайного параметра δ в i-м фильтре в (k+1)-й момент.
p(δi|k) - значение апостериорной вероятности случайного параметра δ в i-м фильтре в k-й момент времени;

П(Xk|δi) и U(Xk|δi) - прогнозы пеленга и уровня сигнала в i-м фильтре в k-й момент времени.
Т - знак транспонирования.
Сущность изобретения
Сущность изобретения заключается в том, что в однопозиционном пассивном радиоэлектронном комплексе (ОПРЭК) для определения горизонтальных координат (ГК), элементов движения цели (ЭДЦ) и коэффициента километрического затухания (ККЗ, δ) электромагнитного излучения цели, содержащем антенну ОПРЭК, блок слежения за радиолокационными сигналами (БСРЛС), блок измерения пеленгов на цель (БИП), блок измерения мощности сигналов на цель (БИМС), блок построения начального вектора состояния - начального пеленга (По), начальной величины изменения пеленга (ВИПо), начальной величины расстояния (ВИРо) и дистанции до цели в начальный момент времени (Do) в каждом фильтре ККЗ (δi)(БПНВС), блок параллельной реализации фильтров Калмана для оценивания текущих векторов состояния (ТВС - X(δi)) с заданным в каждом фильтре (δi) (БПРФК), блок вычисления текущих координат цели - пеленга и дистанции (Пt и Dt) и ЭДЦ - скорости и курса (Vt и Kt) (БВТК и ЭДЦ), блок освещения текущей обстановки (БОТО) и блок выдачи информации на экран (БВИЭ), в состав дополнительно введены блок получения априорных значений δ и плотностей вероятности δ (р(δ)) (БПАЗ δ и р(δ)), блок определения априорных значений δi и плотностей вероятности δi для каждого фильтра (р(δi)) для каждого фильтра с номером i (БОАЗ δi и p(δi)), блок вычисления значений апостериорных вероятностей случайной дискретной величины в каждом фильтре с номером i (БВАЗВ δ), при i=1, 2, 3, … n и блок взвешенного суммирования оценок вектора состояния (Xк(δi)) всех фильтров δi (БВСО Хк(δi)), при этом выход антенны ОПРЭК соединен со входом БСРЛС, первый и второй выходы которого соединены соответственно со входами БИП и БИМС, выходы последних соединены соответственно с первым и вторым входами БПНВС, первый и второй выходы которого соединены соответственно с первыми входами БПРФК и БВАЗВ δ, выход БПАЗ δ и р(δ) соединен со входом БОАЗ δi и р(δi), первый выход которого соединен с третьим входом БПНВС, а его второй - со вторым входом БВАЗВ δ, первый выход последнего соединен со вторым входом БПРФК, а его второй выход - со вторым входом БВСО Хк(δi), первый вход которого соединен с выходом упомянутого БПРФК, а его выход - со входом БВТК и ЭДЦ, кроме того, первый и второй выходы последнего соединены соответственно со входами БОТО и БВИЭ.
Разработан ОПРЭК, позволяющий производить адаптивную оценку ГК и ЭДЦ при неизвестном значении ККЗ электромагнитного излучения цели в среде распространения радиоволн.
ОПРЭК не требует выполнения специальных маневров носителя локационного измерителя или привлечения других носителей, которые обычно применяются при традиционных методах определения местоположения источников излучения радиоволн.
Описание ОПРЭК приведено для плоской (двумерной) радиолокации при решении задачи определения полярных координат объектов различной природы.
Заявляемое изобретение поясняется структурной схемой, где:
1 - антенна ОПРЭК;
2 - блок слежения за радиолокационными сигналами (БСРЛС);
3 - блок измерения пеленгов на цель (БИП);
4 - блок измерения мощности сигналов от цели (БИМС);
5 - блок построения начального вектора состояния - начального пеленга (По), начальной величины изменения пеленга (ВИПо), начальной величины расстояния (ВИРо) и дистанции до цели в начальный момент времени (Do) в каждом фильтре коэффициента километрического затухания (ККЗ - δi) (БПНВС);
6 - блок параллельной реализации фильтров Калмана для оценивания текущих векторов состояний (ТВС - X(δi)) с заданным в каждом фильтре δi (БПРФК);
7 - блок получения априорных значений δ и плотностей вероятности δ (р(δ)) (БПАЗ δ и р(δ));
8 - блок определения априорных значений δi и плотностей вероятности δi р(δi) для каждого фильтра с номером i (БОАЗ δi и p(δi));
9 - блок вычисления значений апостериорных вероятностей случайной дискретной величины δ в каждом фильтре с номером i (БВАЗВ δ);
10 - блок взвешенного суммирования оценок вектора состояния Хк(δi) всех фильтров δi (БВСО Хк(δi));
11 - блок вычисления текущих координат цели - пеленга Пt и дистанции Dt и ЭДЦ - скорости Vt и курса Kt (БВТК и ЭДЦ);
13 - блок выдачи информации на экран (БВИЭ);
12 - блок освещения текущей обстановки (БОТО).
Осуществление изобретения
Заявляемый однопозиционный пассивный радиоэлектронный комплекс (ОПРЭК) для определения горизонтальных координат (ГК), элементов движения цели (ЭДЦ) и коэффициента километрического затухания (ККЗ, δ) электромагнитного излучения цели работает следующим образом.
Сигналы от цели, принятые антенной ОПРЭК 1, обрабатываются в блоке слежения за радиолокационными сигналами 2 для их сопровождения и последующего измерения пеленгов на цель в блоке измерения параметров сигнала на цель 3 и измерения мощности сигналов от цели в блоке измерения сигналов от цели 4, одновременно с этим в блоке получения априорных значений δ и плотностей вероятности δ (р(δ)) 7 получают априорные значения δ и плотностей вероятности δ (р(δ)), а в блоке определения априорных значений δi и плотностей вероятности δi (P(δi)) для каждого фильтра с номером i 8 определяют априорные значения δi и плотностей вероятности δi (p(δi)), параллельно данные из блока измерения параметров сигнала на цель 3 и блока измерения мощности сигналов от цели 4, а также данные из блока определения априорных значений δi и плотностей вероятности δi (p(δi)) для каждого фильтра с номером i 8 используют для построения НВС - По, ВИПо, ВИРо и Do в каждом фильтре δi в блоке построения НВС 5, из значений По, ВИПо, ВИРо и Do и значений δi и (p(δi)) из блока определения априорных значений δi и плотностей вероятности δi (p(δi)) для каждого фильтра с номером i 8 поступают в блок вычисления значений апостериорных вероятностей случайной дискретной величины δ в каждом фильтре с номером i 9 для вычисления апостериорных значений вероятности случайной дискретной величины δ в каждом фильтре с номером i, одновременно из блока построения НВС 5 значения По, ВИПо, ВИРо и Do и вычисленные апостериорные значения вероятности случайной дискретной величины δ в каждом фильтре с номером i из блока вычисления значений апостериорных вероятностей случайной дискретной величины δ в каждом фильтре с номером i 9 поступают в блок параллельной реализации фильтров Калмана для оценивания ТВС - X(δi) с заданным в каждом фильтре (δi) 6 с целью параллельной реализации работы фильтров Калмана для оценивания ТВС - X(δi) с заданным в каждом фильтре δi, эти оценки и вычисленные апостериорные значения вероятности случайной дискретной величины δ в каждом фильтре с номером i из блока вычисления значений апостериорных вероятностей случайной дискретной величины δ в каждом фильтре с номером i 9 поступают в блок взвешенного суммирования оценок вектора состояния (Хк(δi)) всех фильтров δi 10 для организации взвешенного суммирования оценок вектора состояния (Хк(δi)) всех фильтров δi, с последующим вычислением текущих координат цели - Пt и Dt и ЭДЦ - Vt и Kt в блоке вычисления текущих координат цели - пеленга и дистанции (Пt и Dt) и ЭДЦ - скорости и курса (Vt и Kt) 11, на основании полученных координат цели и ЭДЦ, которые отображаются на экране БВИЭ 13, формируются данные для освещения текущей обстановки в БОТО 12 и принятия оперативного решения.
Входной информацией для определения координат и ЭДЦ могут служить выходные формуляры системы сопровождения цели в пассивных каналах радиолокационных станций (РЛС) и данные систем геоинформационного обеспечения.
Осуществление изобретения может быть выполнено путем внедрения реализации алгоритма в программное обеспечение работающих станций или изготовления вычислительного блока - приставки к действующим РЛС при условии измерения РЛС пеленгов и мощностей сигналов цели на входе приемной антенны.
Возможно изготовление отдельного блока - приставки, который после настройки входа может решать задачу определения полярных координат и ЭДЦ в пассивном режиме.
Технический результат от использования изобретения заключается в повышении точности и быстродействия работы применением дополнительных аппаратных средств для обеспечения использования адаптивного метода «разделенного» оценивания вектора состояния Х(δ) и параллельной реализации n фильтров Калмана, каждый из которых независимо от остальных решает задачу оценки вектора состояния X(δi), в условиях параметрической неопределенности параметра δi - коэффициента километрического затухания, с последующим суммированием взвешенных оценок X(δi), где i=1, 2, 3, … n.
Указанный технический результат достигается совокупностью отличительных признаков, определяющих новизну заявляемого изобретения, а именно дополнительным введением блока получения априорных значений δ и плотностей вероятности δ (р(δ)), блока определения априорных значений δi и плотностей вероятности δi (p(δi)) для каждого фильтра с номером i, блока вычисления значений апостериорных вероятностей случайной дискретной величины 5 в каждом фильтре с номером i и блока взвешенного суммирования оценок вектора состояния (Хк(δi)) всех фильтров δi.
Представленные описание и структурная схема заявляемого однопозиционного пассивного радиоэлектронного комплекса позволяют, используя покупные комплектующие изделия, существующие материалы и оснастку, изготовить его промышленным способом и использовать для определения координат цели - дистанции и пеленга и элементов движения цели - скорости и курса с учетом коэффициента километрического затухания электромагнитного излучения цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ | 1993 |
|
RU2048684C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2528113C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| Способ распознавания функционального назначения летательных аппаратов пары по принципу "ведущий-ведомый" | 2019 |
|
RU2726869C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| Способ распознавания варианта наведения подвижного объекта на один из летательных аппаратов группы | 2019 |
|
RU2713212C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
Изобретение относится к области радиолокации, а именно к радиолокационным станциям с режимом пассивного обнаружения, установленным на одиночных носителях, и может быть использовано для определения горизонтальных координат и элементов движения излучающих целей. Достигаемый технический результат - повышение точности и быстродействия однопозиционного определения горизонтальных координат, элементов движения цели (ЭДЦ) и коэффициента километрического затухания (δ) электромагнитного излучения цели. Указанный результат достигается тем, что однопозиционный пассивный радиоэлектронный комплекс содержит антенну, блок слежения за радиолокационными сигналами, блок измерения пеленгов на цель, блок измерения мощности сигналов на цель, блок построения начального вектора состояния начального пеленга, начальной величины изменения пеленга, начальной величины расстояния и дистанции до цели в начальный момент времени в каждом фильтре δi, блок параллельной реализации фильтров Калмана для оценивания текущих векторов состояния с заданным в каждом фильтре δi, блок вычисления текущих координат цели - пеленга и дистанции и ЭДЦ - скорости и курса, блок освещения текущей обстановки, блок выдачи информации на экран, блок получения априорных значений δ и плотностей вероятности δ (р(δ)), блок определения априорных значений δi и плотностей вероятности δi для каждого фильтра (р(δi)), для каждого фильтра с номером i, блок вычисления значений апостериорных вероятностей случайной дискретной величины в каждом фильтре с номером i, при i=1, 2, 3, … n и блок взвешенного суммирования оценок вектора состояния (Xк(δi)) всех фильтров δi. 1 ил.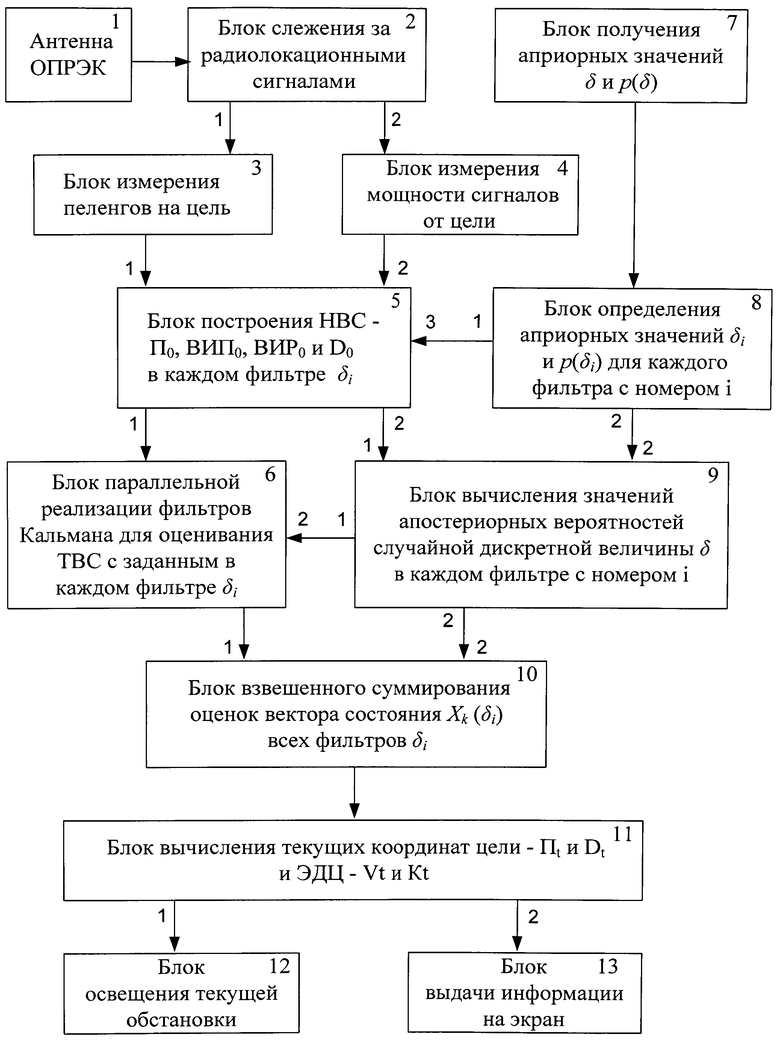
Однопозиционный пассивный радиоэлектронный комплекс (ОПРЭК) для определения горизонтальных координат, элементов движения цели (ЭДЦ) и коэффициента километрического затухания электромагнитного излучения цели (ККЗ, δ), содержащий антенну ОПРЭК, блок слежения за радиолокационными сигналами (БСРЛС), блок измерения пеленгов на цель (БИП), блок измерения мощности сигналов на цель (БИМС), блок построения начального вектора состояния - начального пеленга (По), начальной величины изменения пеленга (ВИПо), начальной величины расстояния (ВИРо) и дистанции до цели в начальный момент времени (Do) в каждом фильтре ККЗ (δi) (БПНВС), блок параллельной реализации фильтров Калмана для оценивания текущих векторов состояния (ТВС - X(δi)) с заданным в каждом фильтре δi (БПРФК), блок вычисления текущих координат цели - пеленга (Пt) и дистанции (Dt) и ЭДЦ - скорости (Vt) и курса (Kt) (БВТК и ЭДЦ), блок освещения текущей обстановки (БОТО) и блок выдачи информации на экран (БВИЭ), отличающийся тем, что в состав дополнительно введены блок получения априорных значений δ и плотностей вероятности δ (р(δ)) (БПАЗ δ и р(δ)), блок определения априорных значений δi и плотностей вероятности δi (p(δi)) для каждого фильтра с номером i (БОАЗ δi и p(δi)), блок вычисления значений апостериорных вероятностей случайной дискретной величины δ в каждом фильтре с номером i (БВАЗВ δ) и блок взвешенного суммирования оценок вектора состояния (XК (δi)) всех фильтров δi (БВСО XК(δi)), при этом выход антенны ОПРЭК соединен со входом БСРЛС, первый и второй выходы которого соединены соответственно со входами БИП и БИМС, выходы последних соединены соответственно с первым и вторым входами БПНВС, первый и второй выходы которого соединены соответственно с первыми входами БПРФК и БВАЗВ δ, выход БПАЗ δ и р(δ) соединен со входом БОАЗ δi и p(δi), первый выход которого соединен с третьим входом БПНВС, а его второй - со вторым входом БВАЗВ δ, первый выход последнего соединен со вторым входом БПРФК, а его второй выход - со вторым входом БВСО ХК(δi), первый вход которого соединен с выходом упомянутого БПРФК, а его выход - со входом БВТК и ЭДЦ, кроме того, первый и второй выходы последнего соединены соответственно со входами БОТО и БВИЭ.
| Сборная железобетонная крепь для горных выработок | 1957 |
|
SU112446A1 |
| Способ определения плотности жидкости | 1960 |
|
SU136587A1 |
| ПОДВИЖНЫЙ ПУНКТ ЦЕЛЕУКАЗАНИЯ И УПРАВЛЕНИЯ | 2010 |
|
RU2480705C2 |
| ПАССИВНЫЙ МЕТОД И СИСТЕМА ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ В ВОДЕ ОБЪЕКТОВ | 2010 |
|
RU2488844C2 |
| FR 2920886 A1, 13.03.2009 | |||
| JP 2012154853 A, 16.08.2012 | |||
| US 20030143975 A1, 31.07.2003. | |||

