Область техники
Настоящее изобретение относится к коррекции систематических ошибок в сенсорном устройстве. В частности, в настоящем изобретении предлагается устройство и способ коррекции систематических ошибок в сенсорном устройстве для измерения гравитации.
Уровень техники
При проведении разведки углеводородов обычно требуются точные и надежные измерения в формациях, которые могут содержать резервуары углеводородов. Обычно измеряются различные параметры, относящиеся к коллектору/породе. Одним из важных параметров является ускорение силы тяжести.
Зная величину ускорения силы тяжести в одном из местоположений в скважине, проходящей через формацию, можно определить фактическую вертикальную глубину этого местоположения. Кроме того, посредством измерения изменения ускорения силы тяжести в каком-то местоположении в скважине может контролироваться содержание резервуара.
Для измерения физических параметров, таких как ускорение силы тяжести или сила тяжести, обычно используются сенсорные устройства (датчики). Параметры, такие как значение силы тяжести, могут быть трудны для измерения в виду того, что величины параметра очень низки или наложения на сенсорное устройство ограничений, обусловленных окружающими условиями. В попытках преодолеть трудности измерения параметров некоторые сенсорные устройства приобретали комплексную структуру. В результате эти сенсорные устройства могут быть подвержены неточностям, известным как систематические ошибки.
Систематические ошибки представляют собой отклонения в измерении или в выходных данных сенсорного устройства. Отклонения имеются в виду такие, что многие измерения значительно отличаются от истинного значения измеряемого параметра. Систематические ошибки растут, когда величина ошибки и соответствующий знак неизвестны.
Систематические ошибки очень трудны для подсчета, поскольку влияние этих ошибок поддается наблюдению, только если эти ошибки могут быть исключены. Повторяемые измерения или осреднение большого количества измерений не могут быть использованы для устранения систематических ошибок.
Имеется несколько типов систематических ошибок. Один тип представляет "систематическое отклонение (постоянную погрешность)" (offset bias). При систематическом отклонении выходные данные сенсорного устройства отклоняются на фиксированную величину от истинного значения на протяжении интервала значений. Таким образом, когда истинная величина равна нулю, выходные данные измерений этой величины сенсорным устройством указывают фиксированную величину отклонения, такую как пять единиц, например. Когда измеряемая истинная величина составляет, например, 100 единиц, на выходе сенсорного устройства будет 105 единиц.
Другим типом систематической ошибки является пропорциональная ошибка, называемая также масштабный фактор (scaling factor) или ошибка, чувствительная к масштабированию (scaling sensitivity error). Пропорциональная ошибка относится к пропорциональной доле истинного измеряемого значения. Например, если истинное значение измеряемой силы составляет 100 единиц и пропорциональная ошибка составляет плюс 10 процентов, тогда на выходе сенсорного устройства будет 110 единиц. Если истинное значение измеряемой силы составляет десять единиц, тогда на выходе сенсорного устройства будет 11 единиц.
Для обеспечения надежных и точных измерений важна возможность устранения систематических ошибок.
Соответственно, требуются средства для устранения или корректирования систематических ошибок в сенсорных устройствах. В частности, это требуется в отношении сенсорных устройств, измеряющих силу тяжести в подземной скважине.
Раскрытие изобретения
В настоящем изобретении предлагается способ для коррекции систематической ошибки сенсорного устройства, имеющего множество акселерометров, сконфигурированных для измерения ускорения силы тяжести, способ включает: вращение множества акселерометров вокруг первой оси; получение первой группы калибровочных измерений от множества акселерометров в результате вращения вокруг первой оси; определение первой систематической ошибки для каждого из множества акселерометров с использованием первой группы калибровочных измерений; и исключение первой систематической ошибки из измерений сенсорного устройства для коррекции систематической ошибки.
Также предлагается сенсорное устройство для измерения ускорения силы тяжести и коррекции систематической ошибки, содержащее: множество совместно размещенных (по соседству) акселерометров, обеспечивающих выходной сигнал, используемый для измерения ускорения силы тяжести, причем каждый из множества акселерометров имеет направление чувствительности и по меньшей мере два из этого множества акселерометров имеют различные направления чувствительности; вращательное устройство, выполненное с возможностью вращения множества совместно размещенных акселерометров вокруг первой оси; и систему обработки (данных), связанную с множеством совместно размещенных акселерометров и выполненную с возможностью: получения первой группы калибровочных измерений от множества акселерометров в результате вращения этого множества вокруг первой оси; определения первой систематической ошибки для каждого из множества акселерометров с использованием первой группы калибровочных измерений; и исключение первой систематической ошибки из измерений сенсорного устройства для коррекции систематической ошибки.
Кроме того, предлагается устройство для измерения ускорения силы тяжести в скважине и коррекции систематической ошибки, содержащее: каротажный прибор; множество акселерометров, совместно размещенных на каротажном приборе и обеспечивающих выходной сигнал, используемый для измерения ускорения силы тяжести, причем каждый акселерометр этого множества имеет направление чувствительности и по меньшей мере два из множества акселерометров имеют различные направления чувствительности; вращательное устройство, выполненное с возможностью вращения множества совместно размещенных акселерометров вокруг первой оси; и систему обработки, связанную с множеством совместно размещенных акселерометров и сконфигурированную с возможностью: получения группы калибровочных измерений от множества акселерометров в результате его вращения вокруг первой оси; определения систематической ошибки для каждого из множества акселерометров, используя группу калибровочных измерений; и устранения первой систематической ошибки из измерений сенсорного устройства для коррекции систематической ошибки.
Краткое описание чертежей
Основные признаки объектов изобретения отдельно и ясно сформулированы в пунктах формулы изобретения, приведенных в конце настоящего описания, а указанные выше и прочие особенности и преимущества изобретения будут более ясны из нижеследующего подробного описания, приведенного в сочетании с приложенными чертежами, на которых одинаковые элементы обозначены одними и теми же номерами. На чертежах показано:
фиг.1 - пример осуществления каротажного прибора, расположенного в стволе скважины, проходящей через пласты пород,
фиг.2 - пример осуществления сенсорного устройства для измерения ускорения свободного падения,
фиг.3А и 3Б (вместе фиг.3) - пример осуществления акселерометра,
фиг.4 - другой пример осуществления сенсорного устройства для измерения ускорения свободного падения,
фиг.5 - вектор силы тяжести,
фиг.6 - сферическая система координат,
фиг.7 - пример реализации компьютерного оборудования, связанного с каротажным прибором,
фиг.8 - пример способа измерения ускорения свободного падения;
фиг.9 - пример выполнения вращательного устройства, соединенного с сенсорным устройством; и
фиг.10 - пример способа коррекции систематической ошибки.
Подробное описание осуществления изобретения
Настоящее изобретение предоставляет средства для измерения ускорения силы тяжести или ускорения свободного падения с высокой степенью точности и прецизионности, которые снижают восприимчивость к помехам и случайному отклонению параметров и обеспечивают коррекцию систематической ошибки. Кроме того, предлагаемые средства могут быть использованы для измерения ориентации.
Далее описывается техника измерения ускорения свободного падения. В одном из вариантов используется сенсорное устройство, включающее множество акселерометров, расположенных вокруг трехмерной структуры. "Расположенных вокруг" означает множество акселерометров, расположенных по меньшей мере на трехмерной структуре или внутри нее в расположении "бок-о-бок". Альтернативно, акселерометры могут быть соединены друг с другом в расположении "бок-о-бок". Термин "совместно размещенные" используется для описания того, что акселерометры расположены близко друг к другу в расположении "бок-о-бок" или вокруг одной и той же трехмерной структуры или соединены с друг с другом. Каждый акселерометр множества используется для проведения измерения (ускорения) силы тяжести. Данное множество акселерометров обеспечивает соответствующее множество выходных сигналов, связанных с измерением ускорения силы тяжести. Эти выходные сигналы объединяются для получения точного и прецизионного измерения ускорения силы тяжести. Благодаря объединению выходных сигналов множество акселерометров обеспечивает измерение ускорения силы тяжести, которое менее восприимчиво к помехам и случайному уходу параметров, чем измерение ускорения силы тяжести посредством только одного акселерометра. В частности, помехи и случайный уход параметров можно уменьшить на величину квадратного корня из общего числа акселерометров в множестве. В соответствии с этим данная методика предусматривает использование множества из сотен акселерометров для значительного уменьшения помех и случайного ухода параметров.
Некоторые акселерометры измеряют силу преимущественно в одном направлении. Это одно направление может быть определено как "направление измерения" или "направление чувствительности". Акселерометры этого типа могут измерять векторную компоненту ускорения силы тяжести, совпадающую преимущественно с одним направлением измерения акселерометра. Поскольку значение ускорения силы тяжести, измеренное акселерометрами этого типа, зависит от ориентации акселерометра относительно направления силы тяжести, выходной сигнал такого акселерометра, зависящего от направления, должен быть скорректирован. Данная методика включает способ коррекции выходных сигналов акселерометров этого типа. Кроме того, данная методика включает способ определения ориентации множества акселерометров относительно направления силы тяжести.
Данная методика предусматривает суммирование скорректированных выходных сигналов с использованием квадратного корня суммы по методу квадратов. Этот метод обеспечивает уменьшение помех и случайного ухода параметров.
В контексте настоящего описания термины "ускорение силы тяжести" и "ускорение свободного падения" являются взаимозаменяемыми. Термин "сила тяжести" относится к силе, действующей на тело вследствие земного притяжения. Зная массу тела и силу тяжести, приложенную к телу, можно определить ускорение свободного падения. Акселерометр, измеряющий ускорение свободного падения, может измерять силу тяжести.
Для удобства в настоящем описании вводится ряд определений. Термин "корпус" относится к конструкции каротажного прибора. Корпус может использоваться по меньшей мере для одной из целей, а именно для размещения и поддержки аппаратуры, используемой с каротажным прибором. Эта аппаратура может представлять собой трехмерную структуру с множеством акселерометров. Термин "трехмерная структура" относится к структуре, для которой требуются три координаты, чтобы описать какую-либо точку на ней. Трехмерная структура является частью измерительного устройства. В соответствии с этим размеры трехмерной структуры выбираются таким образом, чтобы она помещалась в корпус каротажного прибора. Термин "акселерометр, зависящий от направления" относится к акселерометру, который измеряет силу ускорения (и, следовательно, ускорение) преимущественно в одном направлении. Термин "результирующее значение ускорения свободного падения" относится к значению ускорения свободного падения, определенному посредством измерения ускорения свободного падения каждым акселерометром из множества акселерометров. Термины "наноэлектромеханическая система (НЭМС)" и "микроэлектромеханическая система (МЭМС)" относятся к "микромашинам (микроизделиям)" или "машинам на чипе". В общем, НЭМС и МЭМС выполняются на подложке, такой как кремниевая пластина. НЭМС и МЭМС изготавливаются технологиями, связанными с изготовлением полупроводниковой электроники. Эти технологии включают фотолитографию, травление и микрообработку. МЭМС устройства обычно имеют размеры от 20 мкм до миллиметра, тогда как компоненты МЭМС устройств обычно имеют размеры между 1 и 100 мкм. НЭМС устройства и их компоненты даже еще меньше.
На фиг.1 представлен вариант осуществления каротажного прибора 10 с продольной осью 11, расположенного в стволе скважины 2. Каротажный прибор 10 может быть использован для измерения ускорения силы тяжести. Каротажный прибор 10 содержит корпус 8, приспособленный для использования в стволе скважины 2. Скважина 2 пробурена в толще пород 7 и проходит через свиту пластов 4, включающую различные пласты 4А-4Е. Спускоподъемные операции с каротажным прибором 10 в стволе скважины 2 обычно производятся с помощью армированного электрического кабеля 6 или аналогичного средства перемещения, известного специалистам. В варианте осуществления на фиг.1 внутрь корпуса 8 помещено сенсорное (измерительное) устройство 9. Сенсорное устройство 9 содержит множество акселерометров, расположенных вокруг трехмерной структуры (т.е. "совместно размещенные"). На фиг.1 также показан блок электроники 5, расположенный внутри корпуса 8. Блок электроники 5 осуществляет обработку выходных сигналов всех акселерометров из множества акселерометров, входящих в состав сенсорного устройства 9. Эти выходные сигналы обрабатываются блоком электроники 5 для определения ускорения свободного падения на сенсорном устройстве 9. Кроме того, блок электроники 5 может обрабатывать измерения, выполняемые множеством акселерометров, для получения калибровочных данных и обрабатывает калибровочные данные для коррекции систематических ошибок. На ускорение свободного падения на сенсорном устройстве 9 могут оказывать влияние пласты 4.
Ясно, что термин "пласты/формации" может включать в себя различные характеристики, относящиеся к горным породам. Соответственно, следует иметь в виду, что хотя термином "пласт" обычно именуется целевая толща пород, термин "пласты" в контексте настоящего описания может в отдельных случаях включать любые геологические объекты исследования (например, область проведения съемки).
В контексте настоящего описания предполагается, что ствол скважины 2 является вертикальным, а пласты 4 - горизонтальными. Настоящее изобретение, однако, может быть с тем же успехом применено к наклонно направленным и горизонтальным скважинам либо к случаю, когда пласты 4А-4Е расположены под произвольным углом. Настоящее изобретение равным образом подходит для проведения каротажа в процессе бурения (в англоязычной литературе "logging while drilling" - LWD), измерений в процессе бурения ("measurement while drilling" - MWD) и для кабельных операций в открытом и обсаженном стволе скважины. При проведении операций LWD/MWD каротажный прибор 10 может располагаться в утяжеленной бурильной трубе. В случае операций LWD/MWD бурение может быть временно приостановлено для предотвращения вибрации в период использования множества акселерометров 3 для выполнения измерения по меньшей мере одного из ускорения силы тяжести и ориентации. В дополнение к конфигурации для перемещения на армированном кабеле 6 или на утяжеленной бурильной трубе, прикрепленной к буровой колонне, каротажный прибор 10 может также быть сконфигурирован для транспортировки на скользящей муфте или гибкой колонне труб.
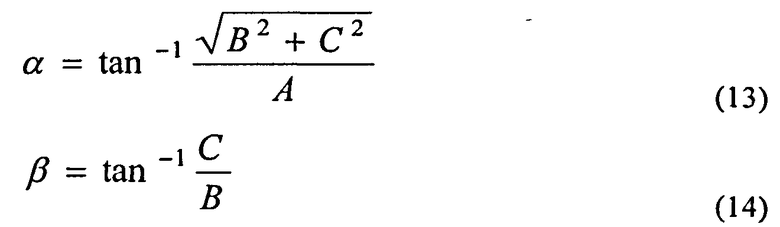
На фиг.2 представлен пример осуществления сенсорного измерительного устройства 9. Как видно из чертежа, множество акселерометров 3 расположено на трехмерной структуре (конструкции) 20. В варианте осуществления на фиг.2 трехмерная структура 20 имеет форму куба. Трехмерная структура 20 может также иметь другие формы, например криволинейную форму, представленную в одном из последующих примеров осуществления изобретения, либо комбинированную форму. Поскольку положение каждого акселерометра 3 на структуре 20 известно, можно использовать любую форму. На фиг.2 показано, что множество акселерометров 3 расположено на трех ортогональных сторонах структуры 20. Как упоминалось выше, данная методика предусматривает использование сотен акселерометров 3. В варианте осуществления на фиг.2 структура 20, которой придана форма куба со стороной около 2,54 сантиметра (1 дюйм), может содержать свыше 100 акселерометров 3 на одной стороне. Такое большое количество акселерометров 3 на малом участке предполагает их исполнение по меньшей мере в одном из таких масштабов, как нано- и микромасштаб. Возможность исполнения акселерометров 3 в столь мелких масштабах обеспечивается использованием твердотельной технологии, например аналогичной той, что используется при изготовлении полупроводниковых устройств.
В одном варианте осуществления акселерометры 3 могут быть выполнены с использованием по меньшей мере одной из систем, известных специалистам в данной области, а именно наноэлектромеханической системы (НЭМС) и микроэлектромеханической системы (МЭМС). В этом варианте осуществления для измерения силы тяжести используется контрольный груз. Контрольный груз связан с дифракционной решеткой таким образом, что по меньшей мере одна координата дифракционной решетки изменяется со смещением контрольного груза. Дифракционная решетка используется вместе с источником света и приемником света, действуя как интерферометрический датчик смещения. Световое излучение из источника света может быть дифрагировано посредством дифракционной решетки для получения дифрагированного светового излучения. Характеристики дифрагированного светового излучения могут быть измерены посредством приемника света и сопоставлены со смещением контрольного груза с целью определения силы тяжести. При известных величинах массы контрольного груза и силы тяжести можно определить ускорение свободного падения.
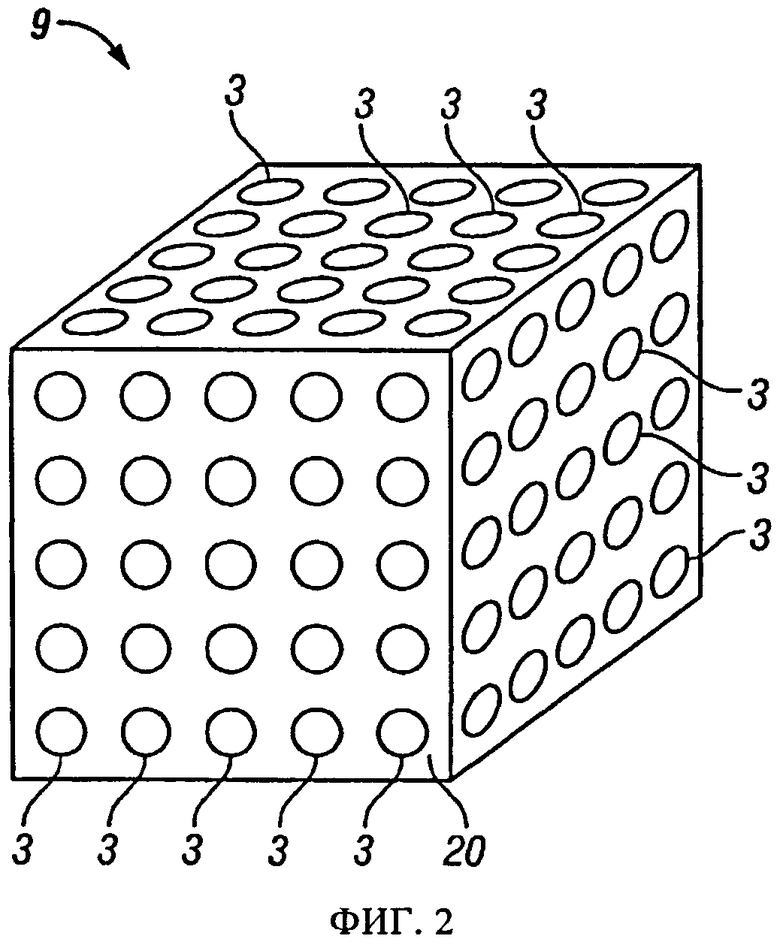
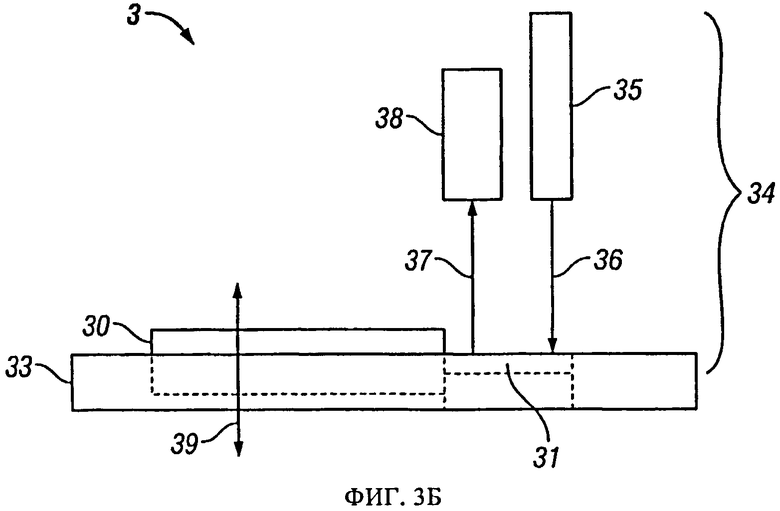
На фиг.3 представлен пример осуществления одного из акселерометров 3, выполненного с использованием по меньшей мере одной из систем НЭМС или МЭМС. На фиг.3А показан вид акселерометра 3 сверху. Как следует из фиг.3А, акселерометр 3 содержит контрольный груз 30, связанный с дифракционной решеткой 31. Контрольный груз 30 подвешен на пружинах 32, соединенных с опорной подложкой 33. Пружины 32 создают силу, противодействующую силе тяжести, в то же время допуская смещение контрольного груза 30, обусловленное силой тяжести. В варианте осуществления, изображенном на фиг.3А, контрольный груз 30, дифракционная решетка 31 и пружины 32 выполнены с использованием по меньшей мере одной из систем НЭМС или МЭМС.
На фиг.3Б показан вид акселерометра 3 сбоку. Акселерометр 3 изображен здесь с источником света и приемником света. Дифракционная решетка 31, источник света 35 и приемник света 38 образуют интерферометрический датчик смещения 34. Источник света 35 испускает входящее световое излучение 36. Входящее световое излучение 36, дифрагированное дифракционной решеткой 31, образует дифрагированное световое излучение 37. Как следует из фиг.3Б, пружины 32 допускают перемещение контрольного груза 30 в основном в направлении 39. По мере перемещения контрольного груза 30 происходит изменение по меньшей мере одной координаты, определяемой дифракционной решеткой 31. В свою очередь, интенсивность одномодового дифрагированного светового излучения 37 связана по меньшей мере с одной координатой. Таким образом, смещение контрольного груза 30 можно определить, измеряя интенсивность одномодового дифрагированного светового излучения 37. Далее, это смещение можно сопоставить с величиной силы тяжести или ускорения свободного падения, действующих на контрольный груз 30.
В одном варианте осуществления изобретения источник света 35 может быть выполнен как лазерный диод. В одном варианте осуществления изобретения приемник света 38 может быть выполнен как фотодиод.
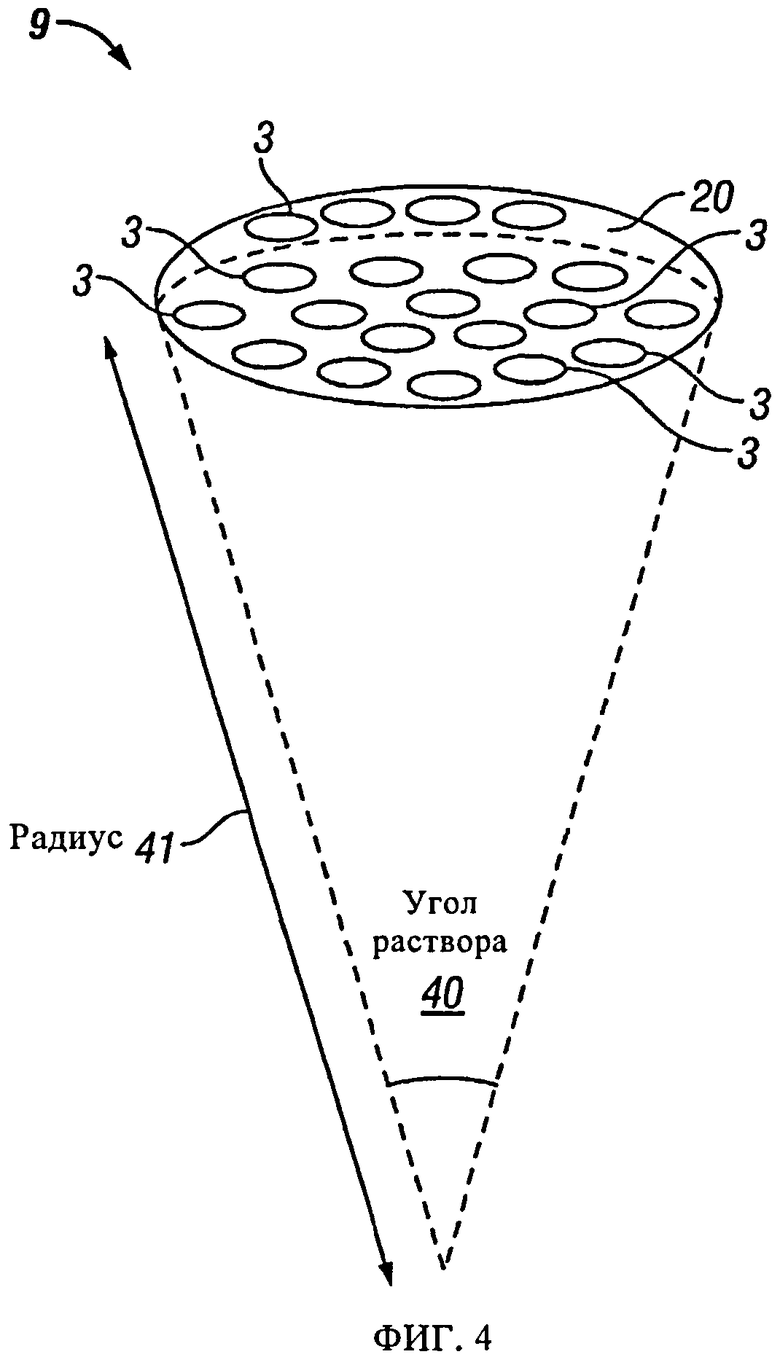
На фиг.4 представлен пример выполнения множества акселерометров 3, расположенных на трехмерной структуре 20, имеющей криволинейную поверхность. Эта криволинейная поверхность представляет собой часть поверхности сферы. В варианте осуществления на фиг.4 часть сферы имеет угол раствора 40, равный приблизительно четырем градусам, и радиус 41, равный приблизительно 21,38 мм (0,84 дюйма), что примерно равно радиусу мяча для гольфа.
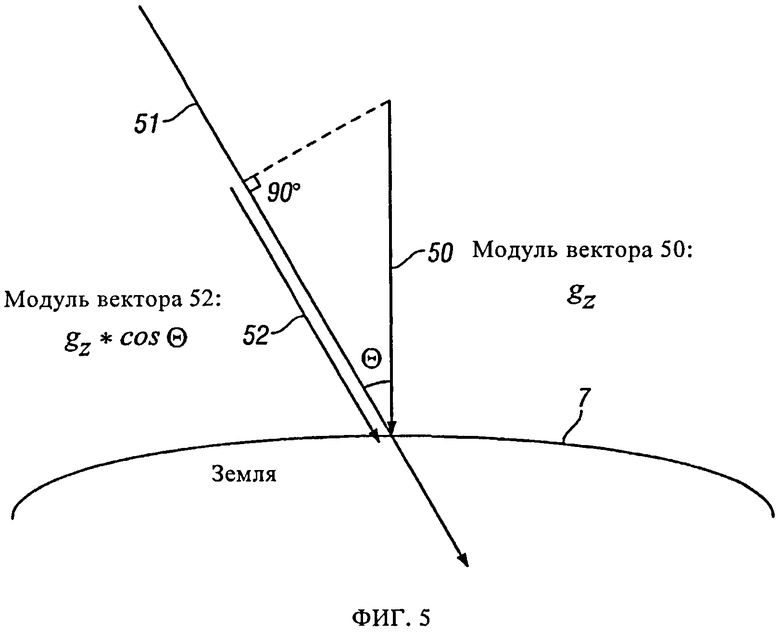
Как упоминалось выше, акселерометры 3, зависящие от направления, могут измерять векторную компоненту силы тяжести, совпадающую с направлением измерения акселерометра 3. На фиг.5 представлена диаграмма, показывающая вектор 50 с модулем gz. На фиг.5 также показано направление измерения 51 одного из множества акселерометров 3, измеряющего ускорение преимущественно в одном направлении. Как видно из фиг.5, составляющая 52 вектора 50 силы тяжести совпадает с указанным направлением измерения 51. Направление вектора 50 силы тяжести используется для определения вертикального направления на земной поверхности 7 и в стволе скважины 2.
Как видно из фиг.5, модуль составляющей 52 вектора 50 силы тяжести, измеренный одним из акселерометров 3, равен gz*cos(Θ), где Θ - угол между векторной составляющей 52 и вектором 50 силы тяжести. Следовательно, gz можно определить путем деления результата измерения акселерометра 3 на cos(Θ).
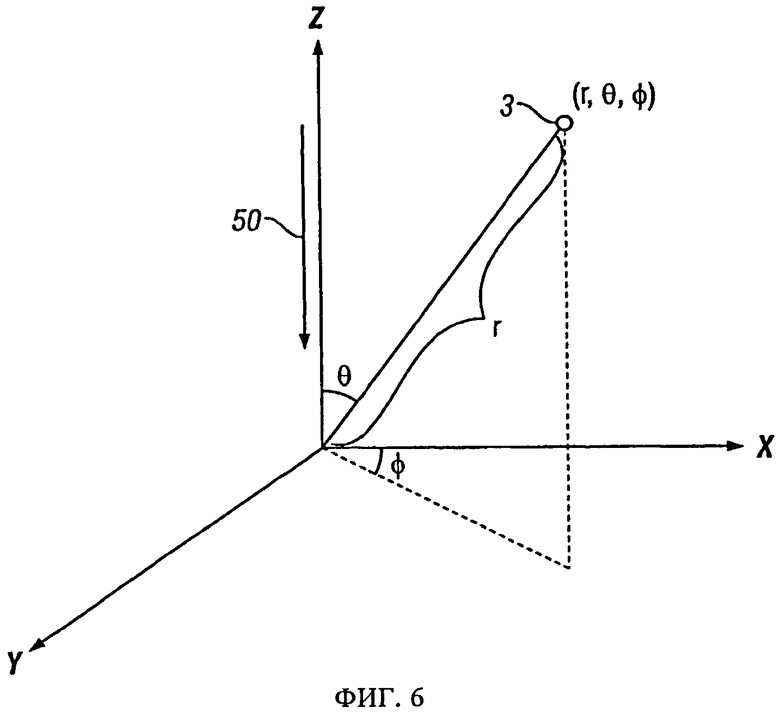
Результаты измерений, выполненных посредством множества акселерометров 3, могут быть скорректированы. Коррекция производится с использованием сферической системы координат, изображенной на фиг.6. Сферическая система координат используется для указания положения каждого из акселерометров 3. Как видно из фиг.6, ось Z совпадает с направлением вектора 50 силы тяжести. Угол θ определяет угловое положение относительно оси Z. Угол ϕ определяет угловое положение относительно оси X. Ось Х определяется как произвольное направление, ортогональное оси Z. Положение i-го акселерометра из множества акселерометров 3 обозначается как (ri, θi, ϕi).
Если в варианте осуществления на фиг.4 криволинейная поверхность вращается вокруг центра кривизны таким образом, что ось Z вращающейся системы координат не совпадает с направлением вектора 50 силы тяжести, то влияние вращения на измерение ускорения силы тяжести можно учесть с помощью ряда приведенных ниже уравнений. Для представления вращения сферической системы координат можно использовать матрицу вращения R. Матрица вращения R в уравнении (1) представлена с использованием сферической системы координат (фиг.6), где α - угол вращения в плоскости X-Z, а β - угол вращения в плоскости X-Y.

Поскольку ось Z вращающейся системы координат не совпадает с вектором 50 силы тяжести, вращающаяся система координат возвращается в исходное положение до начала вращения. Обратное вращение вращающейся системы координат может быть отражено посредством инверсии R, что также представляет собой транспонирование R. Уравнение (2) используется при расчете вращения системы координат для возврата к первоначальной системе прямоугольных координат.

В уравнении (2) можно раскрыть скобки для определения Z-составляющей, z. Уравнение (3) используется для определения z.

Уравнение (3) может быть использовано для представления измерения ускорения силы тяжести gi посредством i-го акселерометра из множества акселерометров 3, как видно из уравнения (4), где gz - модуль вектора 50 силы тяжести.

Уравнение (4) можно упростить, как это показано в уравнении (5), где di, A, В и С определяются соответственно уравнениями (6), (7), (8) и (9).
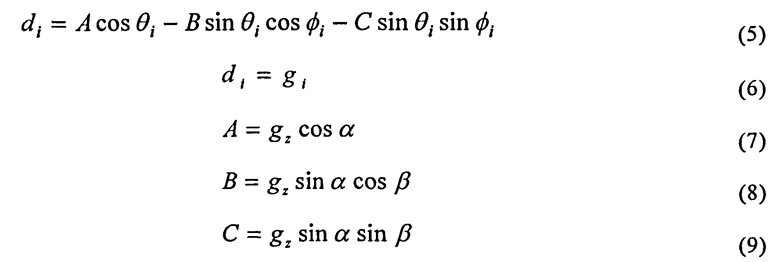
Из уравнений (5)-(9) может быть получена целевая функция, как показано в уравнении (10).

Приравняв к нулю производную представленной в уравнении (10) целевой функции с параметрами А, В и С, можно определить А, В и С путем решения уравнения (11).

Модуль gz вектора 50 силы тяжести можно вычислить из уравнения (12).

Можно также вычислить углы α и β. Для вычисления α используется уравнение (13), а β - уравнение (14).
Как правило, каротажный прибор 10 включает модификации, могущие оказаться необходимыми для проведения операций в процессе бурения или после его завершения.
На фиг.7 изображено устройство, посредством которого реализуется настоящее изобретение. Устройство, показанное на фиг.7, включает систему 70 обработки (данных), связанную с каротажным прибором 10. Система 70 обработки обычно содержит компоненты, необходимые для обработки в режиме реального времени данных, полученных от каротажного прибора 10. Примеры компонентов включают, без ограничений, по меньшей мере один процессор, носитель, запоминающее устройство, устройства ввода и вывода данных и т.д. Поскольку эти компоненты известны специалистам в данной области, они не изображены детально на приведенных здесь чертежах.
Альтернативно или в дополнение к блоку 5 электроники, система 70 обработки может быть сконфигурирована с возможностью обработки выходных данных от множества акселерометров 3 для вычисления ускорения силы тяжести и/или коррекции систематической ошибки в сенсорном устройстве 9.
В целом, некоторые идеи настоящего изобретения сводятся к одному алгоритму, записанному на машиночитаемом носителе. Этот алгоритм выполняется системой 70 обработки, и операторы получают на выходе требуемые данные. Эти данные обычно поступают в режиме реального времени.
Каротажный прибор 10 может быть использован для проведения в режиме реального времени измерений различных параметров, например ускорения силы тяжести. В контексте настоящего описания получение данных "в режиме реального времени" означает получение данных со скоростью, подходящей или адекватной для принятия решений в ходе таких процессов, как добыча, исследование, проверка и другие типы съемки или использования, которые могут быть выбраны пользователем или оператором. В качестве не ограничивающего примера можно указать измерения и расчеты в режиме реального времени, предоставляющие пользователям информацию, необходимую для осуществления требуемых корректировок в ходе процесса бурения. В одном варианте осуществления корректировки могут проводиться на постоянной основе (со скоростью бурения), тогда как в другом варианте осуществления для проведения корректировок может потребоваться периодическая остановка бурения для оценки данных. Следовательно, необходимо понимать, что понятие "в режиме реального времени" относится к данному контексту и не означает обязательно мгновенного получения данных, оставляя возможность для любых других вариантов периодичности сбора и анализа данных.
Осуществление настоящего изобретения дает возможность обеспечения высокого уровня контроля качества данных. Например, контроль качества может осуществляться по известной методике итерационной обработки и сравнения данных. В соответствии с этим предусматривается, что для обработки в режиме реального времени могут быть учтены дополнительные поправочные коэффициенты и прочие аспекты. В предпочтительном варианте осуществления пользователь может применить к данным требуемые допуски контроля качества и тем самым сохранить баланс между скоростью получения и уровнем качества данных.
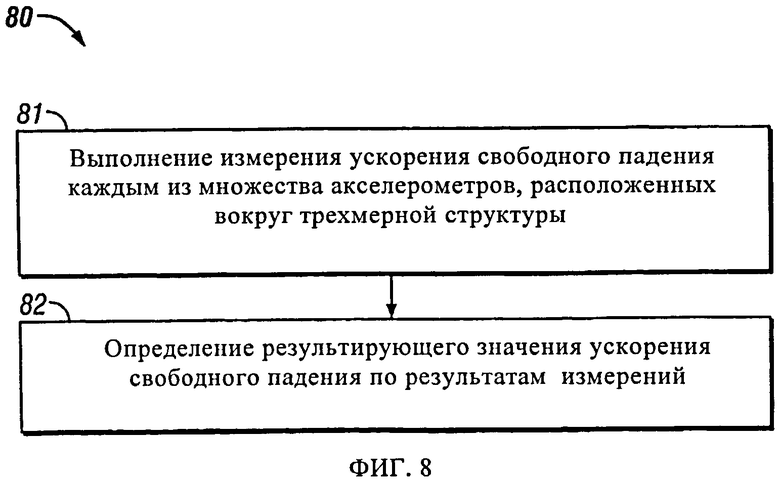
На фиг.8 представлен пример способа 80 определения ускорения свободного падения внутри ствола скважины 2. Способ 80 предусматривает выполнение измерения (шаг 81) ускорения свободного падения каждым из акселерометров 3. Кроме того, способ 80 предусматривает определение (шаг 82) результирующего значения ускорения свободного падения из отдельных измерений.
В некоторых вариантах осуществления множества акселерометров 3 и трехмерной структуры 20 множество акселерометров 3 встраивается в трехмерную структуру 20. Например, трехмерная структура 20 может представлять собой полупроводник, на котором создано множество акселерометров 3.
В некоторых вариантах осуществления может быть использована связка из двух и более каротажных приборов 10, где каждый каротажный прибор 10 содержит по меньшей мере множество акселерометров 3, расположенных на трехмерной структуре 20. В этих вариантах осуществления выходные данные с каждого каротажного прибора 10 могут быть использованы по отдельности или совместно с другими выходными данными для получения общего массива данных.
Теперь будут представлены способы коррекции систематических ошибок. В отношении настоящего раскрытия систематические ошибки представляют собой отклонения в измерении ускорения силы тяжести или в выходных данных каждого акселерометра 3. Отклонения таковы, что среднее значение множества измерений ускорения силы тяжести значительно отличается от истинного измеряемого значения ускорения силы тяжести. Систематические ошибки растут, когда величина ошибки и соответствующий знак неизвестны.
В сенсорном устройстве 9 могут иметь место систематические ошибки различного типа. Один тип представляет собой "систематическое отклонение". При систематическом отклонении выходные данные акселерометра 3 отклоняются на фиксированную величину от истинного значения на протяжении диапазона значений. Так, когда истинное значение ускорения силы тяжести равно нулю в соответствующем направлении чувствительности акселерометра 3, выходные данные акселерометра 3 отразят фиксированную величину отклонения.
Другой тип систематической ошибки представляет собой пропорциональную ошибку, которая также может называться масштабный фактор или ошибка, чувствительная к масштабированию. Пропорциональная ошибка относится к пропорциональной доли истинного значения измеряемого (ускорения силы тяжести. Например, если истинное значение измеряемого ускорения силы тяжести составляет 1,0 g, а пропорциональная ошибка - десять процентов, тогда на выходе сенсорного устройства будет 1,1 g.
Способы коррекции систематических ошибок предлагаются для сенсорного устройства 9, вращающегося вокруг оси (первая ось) и выполнения ряда измерений акселерометрами 3. Ряд измерений, которые могут быть использованы для калибровки, затем анализируются для определения любой систематической ошибки. Например, если ось вращения представляет собой продольную ось 11, а скважина 2 вертикальна, тогда акселерометры 3 с направлением чувствительности, перпендикулярным продольной оси 11, не предполагаются для измерения какого-либо ускорения силы тяжести. Любое считывание ненулевого ускорения силы тяжести может быть отнесено к систематической ошибке и, таким образом, ее выявлению и корректировке.
Для этих акселерометров 3 с направлением чувствительности, параллельном продольной оси 11 на протяжении вращения, предполагается, что измерения будут постоянны. Таким образом, непостоянные результаты измерений этих акселерометров 3 могут быть отнесены к систематической ошибке, такой как вызванная отклонением от оси акселерометра 3 по отношению к сенсорному устройству 9.
В предлагаемых способах также предусматривается, что сенсорное устройство 9 вращается вокруг другой оси (вторая ось) и выполняет второй ряд (группу) калибровочных измерений. В общем, вторая ось перпендикулярна продольной оси 11. При вращении на 360° вокруг второй оси эти акселерометры 3 с направлениями чувствительности, изменяющимися по отношению к направлению ускорения силы тяжести, имеют выходные данные в синусоидальной форме. Предполагается, что выходные данные этих акселерометров 3 изменяются: (1) от нуля, когда направление чувствительности перпендикулярно направлению ускорения силы тяжести, (2) до положительного значения ускорения силы тяжести, когда направление чувствительности параллельно и в том же направлении, как направление ускорения силы тяжести, (3) обратно к нулю, когда направление чувствительности снова перпендикулярно направлению ускорения силы тяжести, и (4) до отрицательного значения ускорения силы тяжести, когда направление чувствительности параллельно и противоположно направлению ускорения силы тяжести. Отклонения от ожидаемых результатов могут указывать на систематическую ошибку.
При вращении вокруг первой оси эти акселерометры 3 с направлениями чувствительности, которые (1) не изменяются на протяжении вращения и (2) перпендикулярны направлению ускорения силы тяжести, ожидаемо выдают измерение нулевого ускорения силы тяжести. Отклонения ускорение силы тяжести от нуля могут указывать на систематическую ошибку.
Систематическая ошибка также может быть выявлена путем вращения на 360° вокруг второй оси. Например, систематическое отклонение может быть выявлено, если выходное синусоидальное изменение не равно нулю, когда направление чувствительности перпендикулярно направлению ускорения силы тяжести.
Выходные сигналы этих акселерометров 3 с тем же направлением чувствительности могут быть сверены в течение или после любого такого вращения. Различия в выходных сигналах могут быть использованы для выявления систематической ошибки, такой как чувствительность к масштабированию.
Вращение сенсорного устройства 9 для целей калибровки требует точной и надежной информации о позиционировании. Информация о позиционировании ненадежна и может приводить к систематическим ошибкам, которые представляют пропорциональную долю к величине ошибки позиционирования.
В одном из вариантов измерение в одном положении вращения может быть сравнено с другим измерением, сделанным с интервалом 180°. В то время как знак одного измерения может быть противоположным знаку другого измерения, ожидается, что модуль будет тем же самым. Таким образом, различия в модуле могут указывать систематическую ошибку. Аналогично, измерения могут быть сверены с другими угловыми положениями, в которых ожидается получение измерений такого же модуля.
В то время как в одном описанном выше варианте осуществляется вращение сенсорного устройства 9 вокруг двух ортогональных осей, сенсорное устройство 9 может также вращаться вокруг третей ортогональной оси с систематической ошибкой, выявляемой с использованием выше описанных техник.
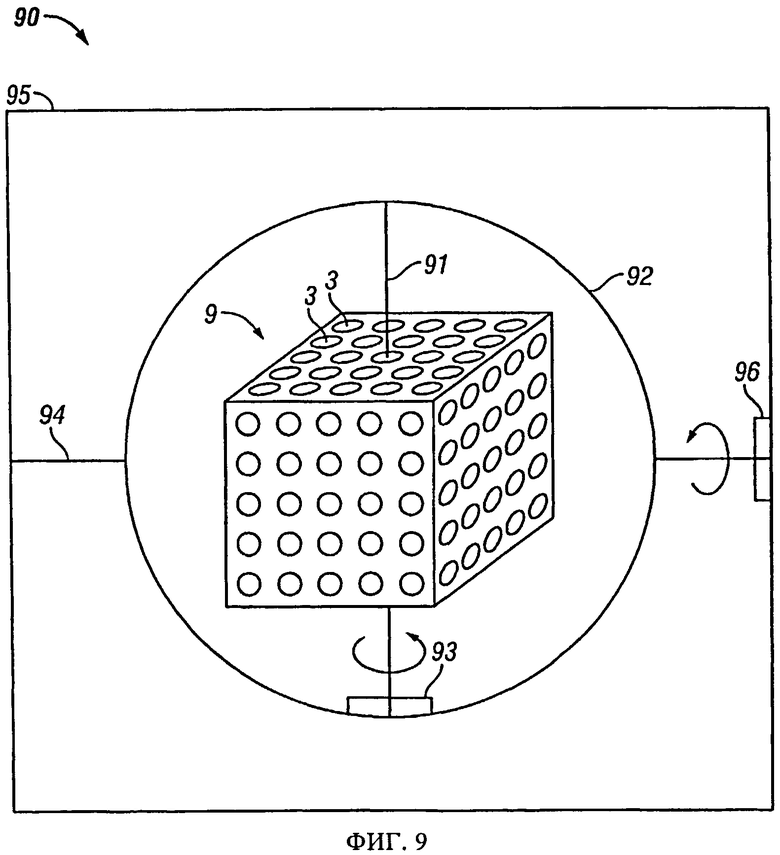
Пример варианта вращательного устройства 90 для вращения сенсорного устройства 9 вокруг первой оси 91 и второй оси 94 проиллюстрированы на фиг.9. В варианте фиг.9 вторая ось 94 ортогональна первой оси 91. Вращательное устройство 90 включает первую вращаемую опору 92, функционально связанную с первым устройством 93 привода во вращение для вращения сенсорного устройства 9 вокруг первой оси 91. Аналогично, вращательное устройство 90 включает вторую вращаемую опору 95, функционально связанную с устройством 96 привода во вращение для вращения сенсорного устройства 9 вокруг второй оси 94. В одном варианте первая вращаемая опора 92 и вторая вращаемая опора 95 представляют собой карданные шарниры.
Как только систематическая ошибка выявлена и определена количественно, она может быть устранена из измерений ускорения силы тяжести посредством сенсорного устройства 9. В одном варианте систематическая ошибка, связанная с каждым отдельным акселерометром 3, удаляется до объединения измерений от множества акселерометров 3 для определения ускорения силы тяжести. В другом варианте систематические ошибки от каждого акселерометра 3 объединены как среднее или средневзвешенное значение, и затем объединенная систематическая ошибка устраняется из объединенных выходных данных акселерометров 3.
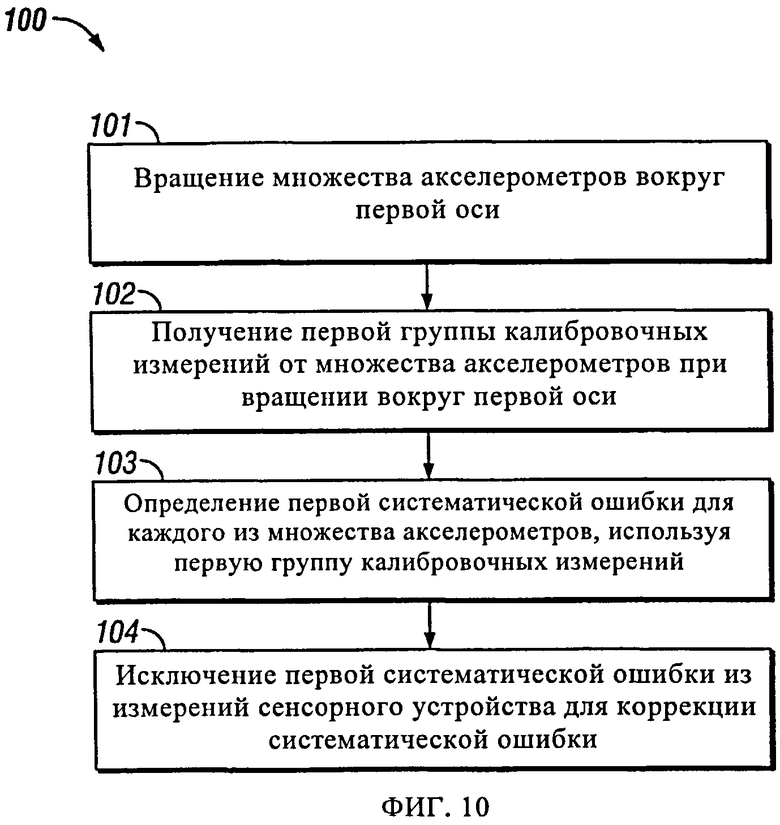
Фиг.10 представляет один пример способа 100 коррекции систематической ошибки сенсорного устройства 9, имеющего множество акселерометров 3, сконфигурированных для измерения ускорения силы тяжести. В способе 100 осуществляют (шаг 101) вращение множества акселерометров 3 вокруг первой оси 91. Далее, в способе 100 (шаг 102) получают первый ряд (группу) калибровочных измерений от множества акселерометров 3 при вращении вокруг первой оси 91. Далее, в способе 100 (шаг 103) определяют первую систематическую ошибку для каждого акселерометра 3 из множества с использованием первой группы калибровочных измерений. Далее, в способе 100 (шаг 104) исключают первую систематическую ошибку из измерений сенсорного устройства для коррекции систематической ошибки. Систематическая ошибка отклонения может быть устранена добавлением или вычитанием в зависимости от знака отклонения. Пропорциональная систематическая ошибка может быть устранена посредством коррекции выходных данных каждого акселерометра 3 или сенсорного устройства 9 на величину, определенную из пропорциональной доли и в направлении для компенсации пропорциональной ошибки.
В качестве вспомогательных средств для устройств настоящего изобретения могут быть использованы различные аналитические компоненты, в том числе цифровые и/или аналоговые системы. Цифровые и/или аналоговые системы могут быть использованы в блоке электроники 5, где предусмотрен по меньшей мере один выход для обработанных данных и сбора данных от каждого акселерометра 3 или в системе 70 обработки. Блок электроники 5 может быть расположен в каротажном устройстве 10 или встроен в систему 70 обработки. Система может включать такие компоненты как процессор, носитель, запоминающее устройство, устройства ввода и вывода данных, канал связи (проводной, беспроводной, гидроимпульсный, оптический и другие), интерфейсы пользователя, программное обеспечение, устройства обработки сигналов (цифровые или аналоговые) и прочие подобные компоненты (например, резисторы, конденсаторы, катушки индуктивности и т.д.) для обеспечения работы и анализа устройств и способов, соответствующих настоящему изобретению, согласно любой из различных методик, известных специалистам в данной области. Предполагается, что эти устройства и способы могут (но не обязательно) быть реализованы в сочетании с набором исполняемых компьютером команд, хранящихся на машиночитаемых носителях, включая запоминающие устройства (ПЗУ, ОЗУ), оптические носители (компакт-диски), магнитные носители (дискеты, жесткие диски) и носители любого иного типа, которые, будучи использованными, обеспечивают выполнение компьютером программы для реализации настоящего изобретения. Эти команды могут обеспечить работу оборудования, контроль, сбор и анализ данных и другие функции, рассматриваемые как необходимые разработчиком, владельцем или пользователем системы либо другими лицами дополнительно к функциям, приведенным в настоящем описании.
Далее, для реализации вариантов настоящего изобретения могут быть использованы и предусмотрены различные другие компоненты. Например, в качестве вспомогательных устройств при реализации различных вариантов настоящего изобретения или иных функций, не раскрытых в настоящем описании, могут быть использованы блок питания (например, по меньшей мере одно из следующих устройств: генератор, удаленный источник питания и аккумуляторная батарея), блок охлаждения, блок нагрева, датчик, передатчик, приемник, приемопередатчик, антенна, блок управления, линза, оптический блок, источник света, приемник света, электрический блок или электромеханический блок, вращаемая опора, или тяговое средство для обеспечения вращения, поступательного движения или привода в движение.
Элементы вариантов осуществления могут быть введены здесь в единственном числе, что не исключает возможности и множественного числа. Термины "включающий" и "имеющий" не исключают возможности наличия и других элементов, кроме приведенных. Союз "или", используемый с перечнем по меньшей мере двух предметов, предполагает любой предмет или их комбинацию. Термины "первый" и "второй" использованы для различения элементов, а не для обозначения определенного порядка.
Ясно, что различные компоненты или технологии могут обеспечить различные потребности, полезные функции или элементы. В соответствии с этим функции и элементы, могущие оказаться необходимыми в качестве вспомогательных для объектов изобретения, указанных в прилагаемых пунктах формулы изобретения, и их модификаций, признаются неотъемлемой частью настоящего изобретения.
Хотя настоящее изобретение описано со ссылками на варианты его осуществления, должно быть ясно, что оно допускает возможность различных изменений, а элементы изобретения могут быть заменены их эквивалентами в пределах его объема. Кроме того, многие модификации вариантов осуществления изобретения могут быть выполнены посредством адаптации к последним конкретных устройств, условий или материалов в пределах сущности и объема изобретения. В силу вышесказанного это подразумевает, что настоящее изобретение не ограничивается описанными конкретными вариантами осуществления, рассматриваемыми как наилучшие, а включает все варианты осуществления, находящиеся в пределах его объема, охватываемого прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ УСОВЕРШЕНСТВОВАНИЯ ИЗМЕРЕНИЯ ГРАДИЕНТА УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ (ВАРИАНТЫ) | 1999 |
|
RU2185642C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВТОРИЧНОЙ ДОБЫЧИ УГЛЕВОДОРОДОВ | 1999 |
|
RU2203397C2 |
| МНОГОКОМПОНЕНТНЫЙ АКСЕЛЕРОМЕТР С ОДНОЙ МАССОЙ | 2016 |
|
RU2733974C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИНЫ | 2014 |
|
RU2567064C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| ПЕРЕВОРАЧИВАЮЩИЙСЯ ИНКЛИНОМЕТР С ГИРОДАТЧИКАМИ | 2015 |
|
RU2703042C2 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕМЕЩЕНИЙ И КОЛЕБАНИЙ ПОДВИЖНЫХ СТРУКТУР | 2014 |
|
RU2636412C2 |
Изобретение относится к коррекции систематических ошибок в сенсорном устройстве. Сущность изобретения заключается в том, что производится коррекция систематической ошибки сенсорного устройства, имеющего множества акселерометров, сконфигурированных для измерения ускорения силы тяжести. В способе осуществляют: вращение множества акселерометров вокруг первой оси; получение первой группы калибровочных измерений от множества акселерометров в результате вращения вокруг первой оси; определение первой систематической ошибки для каждого из множества акселерометров с использованием первой группы калибровочных измерений; и исключение первой систематической ошибки из измерений сенсорного устройства для коррекции систематической ошибки. Технический результат - устранение или корректирование систематических ошибок в сенсорных устройствах. 3 н. и 17 з.п. ф-лы, 11 ил.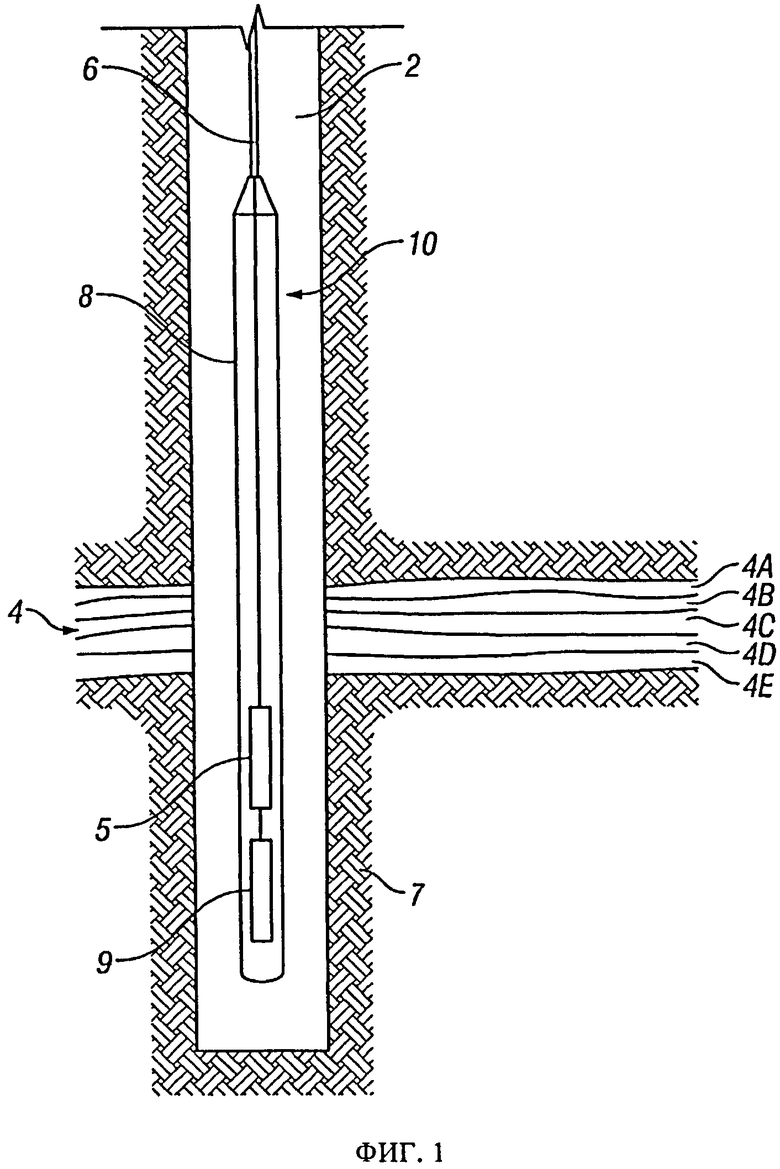
1. Способ коррекции систематической ошибки сенсорного устройства, содержащего множество акселерометров, выполненных с возможностью измерения ускорения силы тяжести, включающий:
вращение множества акселерометров вокруг первой оси;
получение первой группы калибровочных измерений от множества акселерометров в результате вращения вокруг первой оси;
определение первой систематической ошибки для каждого из множества акселерометров с использованием первой группы калибровочных измерений; и
исключение первой систематической ошибки из измерений сенсорного устройства для коррекции систематической ошибки.
2. Способ по п.1, дополнительно включающий:
вращение сенсорного устройства вокруг второй оси;
получение второй группы калибровочных измерений от множества акселерометров в результате вращения вокруг второй оси;
определение второй систематической ошибки для каждого из множества акселерометров с использованием первой группы калибровочных измерений; и
исключение второй систематической ошибки из будущих измерений.
3. Способ по п.2, в котором первая ось продольна оси каротажного прибора, содержащего сенсорное устройство.
4. Способ по п.3, в котором вторая ось ортогональна первой оси.
5. Способ по п.1, в котором первая группа калибровочных измерений включает ряд измерений, выполненных по меньшей мере одним из множества сенсорных устройств.
6. Способ по п.1, в котором сенсорное устройство поворачивают на 360° вокруг первой оси.
7. Способ по п.6, в котором первая группа калибровочных измерений коррелируется с синусоидой.
8. Способ по п.1, в котором каждое сенсорное устройство имеет направление чувствительности и первое из множества сенсорных устройств имеет первое направление чувствительности, а второе из множества сенсорных устройств имеет второе направление чувствительности, отличающееся от первого направления чувствительности.
9. Способ по п.1, в котором систематическая ошибка представляет собой по меньшей мере систематическое отклонение или ошибку, пропорциональную величине выходного сигнала сенсорного устройства из упомянутого множества.
10. Способ по п.1, в котором систематическая ошибка вызвана несоосностью акселерометров в упомянутом множестве.
11. Способ по п.1, в котором первую систематическую ошибку исключают посредством вычитания соответствующей первой систематической ошибки из измерения, выполненного каждым акселерометром.
12. Способ по п.1, в котором первую систематическую ошибку исключают посредством усреднения первых систематических ошибок для определения средней систематической ошибки; и вычитания средней систематической ошибки из комбинированного выходного сигнала, объединяющего измерения, выполненные акселерометрами упомянутого множества.
13. Способ по п.1, осуществляемый посредством компьютерного программного продукта, хранящегося на машиночитаемом носителе, содержащем машиновыполняемые команды.
14. Сенсорное устройство для измерения ускорения силы тяжести с коррекцией систематической ошибки, содержащее:
множество, совместно размещенных акселерометров, обеспечивающих выходной сигнал, используемый для измерения ускорения силы тяжести, причем каждый из множества акселерометров имеет направление чувствительности и по меньшей мере два из множества акселерометров имеют различные направления чувствительности;
вращательное устройство, выполненное с возможностью вращения множества совместно размещенных акселерометров вокруг первой оси; и
систему обработки данных, связанную с множеством совместно размещенных акселерометров и выполненную с возможностью:
получения первой группы калибровочных измерений от множества акселерометров в результате его вращения вокруг первой оси;
определения первой систематической ошибки для каждого из множества акселерометров с использованием первой группы калибровочных измерений; и
исключение первой систематической ошибки из измерений сенсорного устройства для коррекции систематической ошибки.
15. Сенсорное устройство по п.14, в котором первая ось продольна оси каротажного прибора, содержащего сенсорное устройство.
16. Сенсорное устройство по п.14, в котором вращательное устройство выполнено с возможностью вращения множества акселерометров вокруг второй оси.
17. Сенсорное устройство по п.16, в котором система обработки выполнена с возможностью:
получения второй группы калибровочных измерений от множества акселерометров в результате вращения его вокруг второй оси;
определения второй систематической ошибки для каждого из множества акселерометров с использованием второй группы калибровочных измерений; и
исключения второй систематической ошибки из измерений сенсорного устройства.
18. Сенсорное устройство по п.17, в котором вторая ось ортогональна первой оси.
19. Сенсорное устройство по п.14, в котором вращательное устройство содержит карданный шарнир.
20. Устройство для измерения ускорения силы тяжести в скважине с коррекцией систематической ошибки, содержащее:
каротажный прибор;
множество акселерометров, совместно размещенных на каротажном приборе, обеспечивающих выходной сигнал, используемый для измерения ускорения силы тяжести, причем каждый акселерометр этого множества имеет направление чувствительности и по меньшей мере два из множества акселерометров имеют различные направления чувствительности;
вращательное устройство, выполненное с возможностью вращения множества совместно размещенных акселерометров вокруг первой оси; и
систему обработки данных, связанную с множеством совместно размещенных акселерометров и выполненную с возможностью:
получения группы калибровочных измерений от множества акселерометров в результате его вращения вокруг первой оси;
определения систематической ошибки для каждого из множества акселерометров с использованием группы калибровочных измерений; и
исключения первой систематической ошибки из измерений сенсорного устройства для коррекции систематической ошибки.
| US 7093370 B2, 22.08.2006 | |||
| US 7065449 B2, 20.06.2006 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИИ | 1995 |
|
RU2144686C1 |
| СПОСОБ УСОВЕРШЕНСТВОВАНИЯ ИЗМЕРЕНИЯ ГРАДИЕНТА УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ (ВАРИАНТЫ) | 1999 |
|
RU2185642C1 |

