Область техники, к которой относится изобретение
Настоящее изобретение относится к терапевтической области, в частности к электромагнитному слежению за медицинскими процедурами, и будет описано с конкретной ссылкой на него.
Предшествующий уровень техники
Для повышения точности расположения инструментария (например, расположения катетера) в ткани были предложены различные способы, основанные на измерениях в форматах трехмерного изображения. Эти форматы изображения используются в попытках определить местоположение устройства ввода иглы относительно ткани, назначенной для терапии, как, например, целевой ткани, обнаруженной с помощью MRI. Эти форматы изображения формируют данные для получения изображения, которые используются при определении соответствующего расположения иглы во время лечения, когда игла обычно помещается в направляющее устройство и вводится внутрь ткани.
Во многих случаях медицинское устройство вводится исключительно на основе этой информации о данных изображения и подтверждение конечного положения медицинского устройства относительно цели требует получения второго набора изображения. В случаях, когда изменения жесткости ткани являются предельными, медицинское устройство может отклоняться от требуемого пути. Точно также медицинское устройство может само искажать ткань и, таким образом перемещать целевую ткань в новое местоположение, так что исходные координаты места назначения далее будут неправильными.
Соответственно, существует потребность в способе и системе для точного размещения хирургических устройств в целевой анатомии во время медицинской процедуры.
Сущность изобретения
Этот раздел представляется с пониманием того, что он не будет использоваться для интерпретации или ограничения объема или сущности формулы изобретения.
В соответствии с одним аспектом примерных вариантов осуществления способ слежения за медицинским устройством может содержать этапы, на которых: обеспечивают, по меньшей мере, три маркера для регистрации электромагнитного пространства целевой анатомии с помощью пространства для формирования изображения целевой анатомии, причем маркеры содержат первый маркер и второй маркер; располагают первый маркер в целевой анатомии пациента, и первый маркер имеет первый электромагнитный (EM) датчик и участок, обеспечивающий изображение; и располагают второй маркер на пациенте вблизи целевой анатомии, и второй маркер имеет второй электромагнитный датчик и обеспечивает изображение; индуцируют ток в первом и втором датчиках, используя для этого генератор поля, внешний по отношению к пациенту; определяют положения первого и второго маркеров на основе индуцированных токов; выполняют получение изображения целевой анатомии, которое содержит визуализацию изображаемой области и второго маркера, и регистрируют электромагнитное пространство целевой анатомии вместе с пространством для получения изображения целевой анатомии, основываясь, по меньшей мере частично, на определенных положениях первого и второго маркеров и визуализации изображаемой области и второго маркера.
В соответствии с другим аспектом примерных вариантов осуществления считываемый компьютером носитель может содержать исполняемую компьютером программу, хранящуюся на нем, причем исполняемая компьютером программа выполнена с возможностью инструктировать компьютерное устройство, в котором предусмотрен считываемый компьютером носитель, выполнять этапы: получения положений первого и второго маркеров, основываясь на индуцированных токах в первом и втором маркерах, при этом первый маркер находится в целевой анатомии и второй маркер является внешним по отношению к целевой анатомии, получение изображения целевой анатомии, которое содержит визуализацию второго маркера и участка, обеспечивающего изображение, связанное с первым маркером, и регистрации электромагнитного пространства целевой анатомии вместе с пространством, для которого может быть получено изображение целевой анатомии, основываясь, по меньшей мере, частично, на положениях первого и второго маркеров и визуализации изображаемой области и второго маркера.
В соответствии с другим аспектом примерных вариантов осуществления, система слежения за целевой анатомией пациента может содержать: первый маркер, имеющий размер и форму для введения в пациента, чтобы достигнуть целевой анатомии, причем первый маркер имеет первый электромагнитный (EM) датчик и участок, обеспечивающий изображение; множество вторых маркеров, имеющих размер и форму для приклеивания к пациенту вблизи целевой анатомии, при этом каждый из вторых маркеров имеет второй электромагнитный датчик и является обеспечивающим изображение, генератор поля, выполненный с возможностью приложения магнитного поля к целевой анатомии и индуцирования тока в первом и вторых датчиках, и процессор, имеющий контроллер, выполненный с возможностью определения положений первого и вторых маркеров, основываясь на индуцированных токах.
Примеры вариантов осуществления, описанные в данном описании, имеют много преимуществ перед современными системами и процессами, в том числе по точности расположения хирургических устройств. Дополнительно система и способ, описанные в данном описании, могут использоваться вместе с существующими хирургическими устройствами, использующими устройства слежения. Другие дополнительные преимущества и выгоды станут очевидны для специалистов в данной области техники после прочтения и понимания следующего подробного описания.
Краткое описание чертежей
Описанные выше и другие признаки и преимущества настоящего раскрытия должны быть оценены и понятны специалистам в данной области техники из последующего подробного описания, чертежей и формулы изобретения.
На чертежах:
Фиг. 1 изображает вид с пространственным разделением деталей для внутреннего маркера, используемого совместно с системой слежения, согласно варианту осуществления;
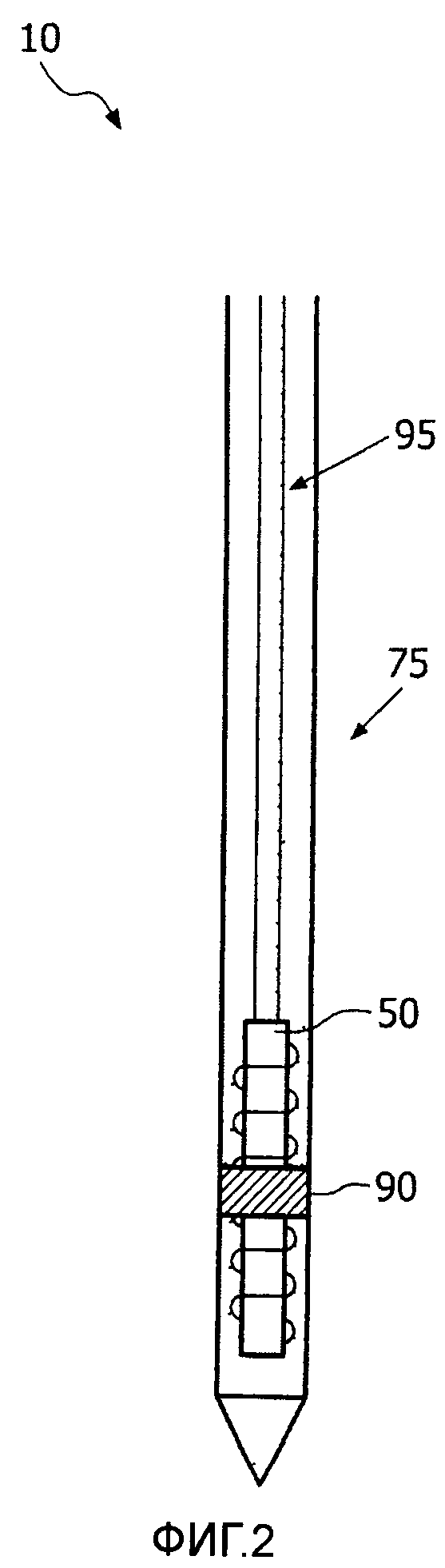
Фиг. 2 изображает внутренний маркер, отличный от показанного на фиг. 1;
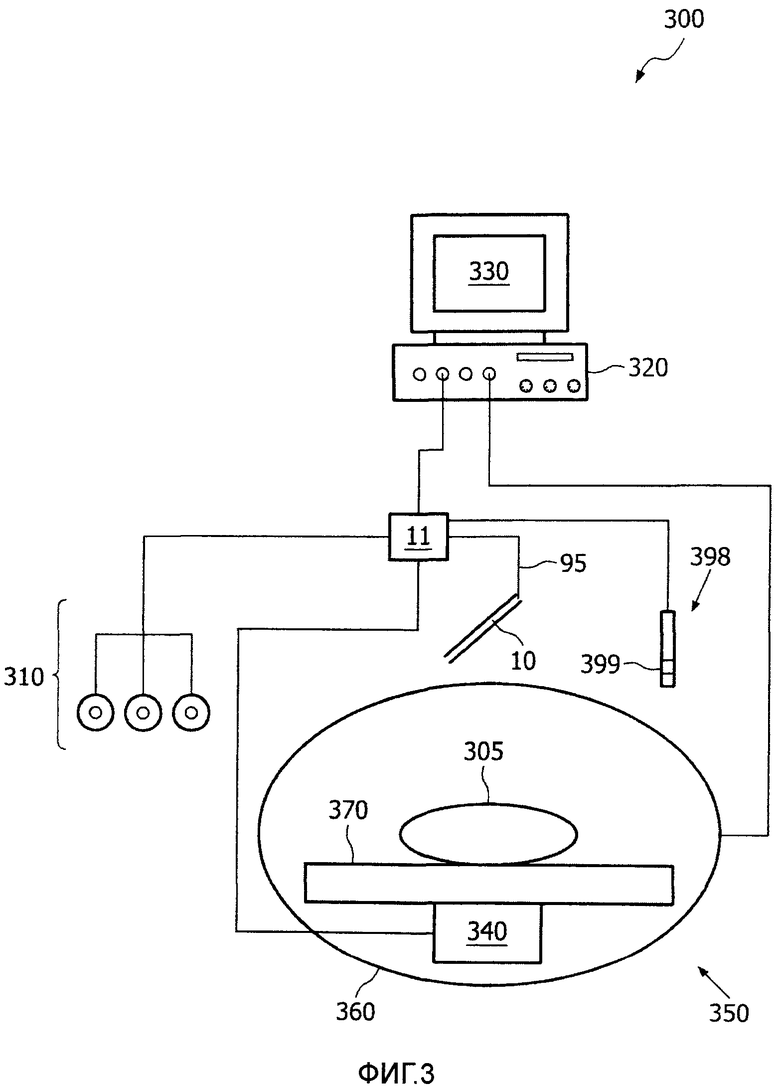
Фиг. 3 изображает схему системы слежения, подключенную к внутреннему маркеру;
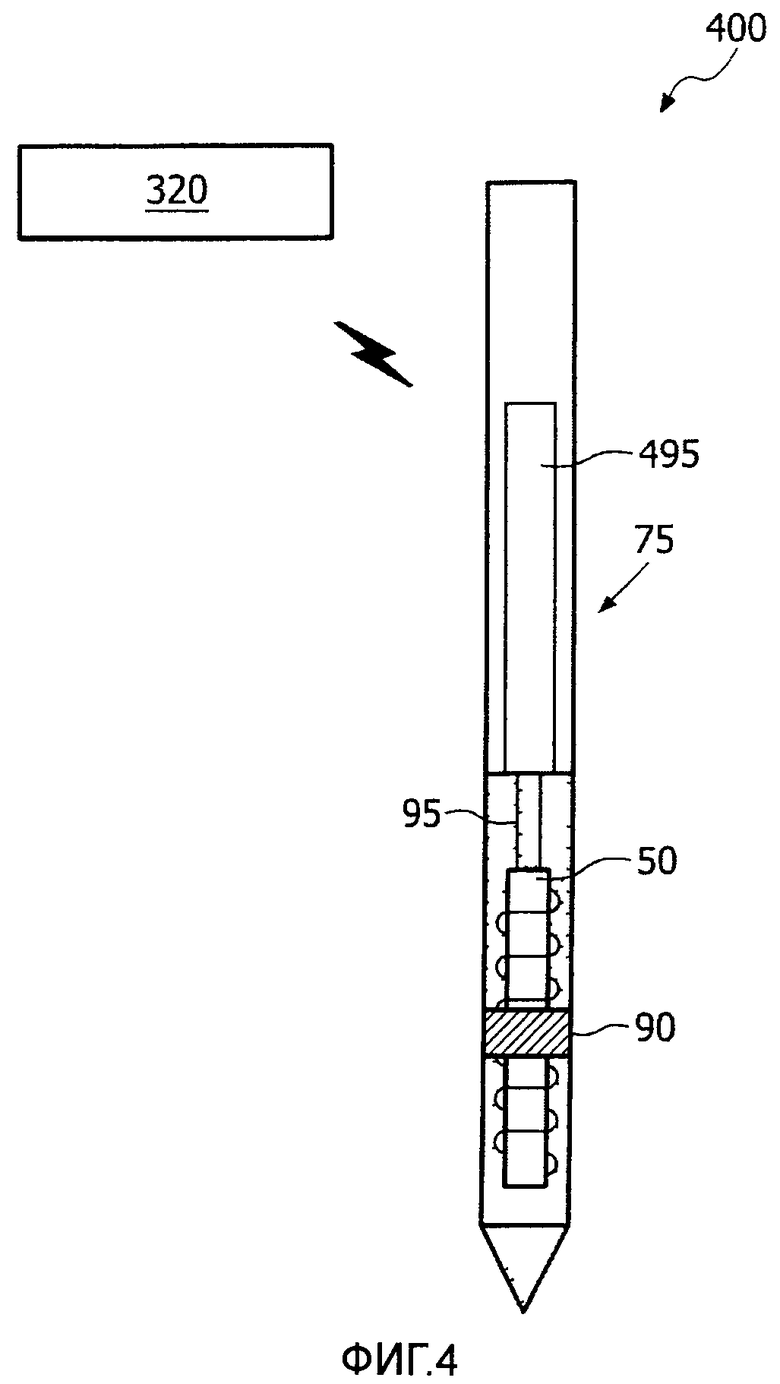
Фиг. 4 изображает другой вариант осуществления внутреннего маркера;
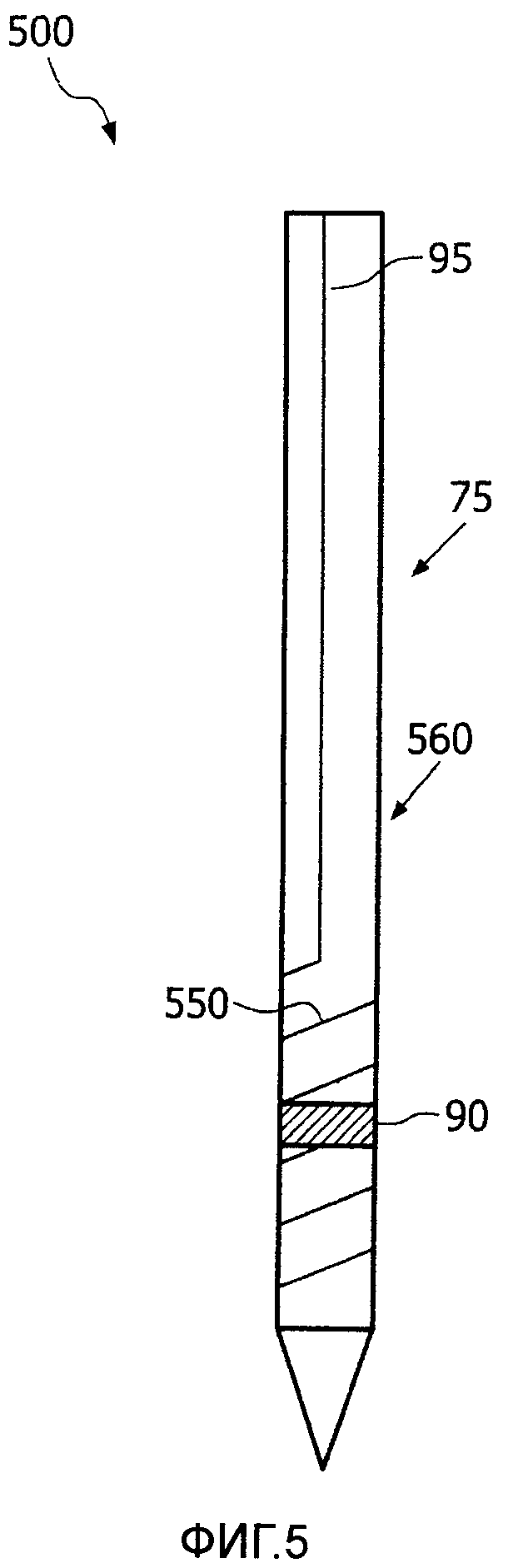
Фиг. 5 изображает другой вариант осуществления внутреннего маркера;
Фиг. 6 изображает другой вариант осуществления внутреннего маркера;
Фиг. 7 изображает блок-схему способа, который может использоваться системой, показанной на фиг. 1-6, для выполнения слежения за медицинским устройством.
Описание вариантов осуществления изобретения
Примерные варианты осуществления настоящего изобретения описываются со ссылкой на электромагнитную систему слежения за хирургическим или другим медицинским устройством, которое должно использоваться во время процедуры на человеке. Специалисты в данной области техники должны понимать, что примерные варианты осуществления настоящего изобретения могут применяться и использоваться совместно с различными типами медицинских или хирургических устройств, различными типами процедур и различными частями тела, независимо от человека или животного. Использование способа и системы, показанных в примерных вариантах осуществления настоящего изобретения, может быть применено к другим типам внутренних маркеров.
Со ссылкой на чертежи, в частности на фиг. 1-3, система 300 слежения может иметь внутренний маркер 10 с устройством 50 датчика. Устройство 50 датчика может быть выполнено как катушка датчика с сердечником 55 (например, металлическим сердечником), причем провод 60 обмотки наматывается на сердечник. Катушка 50 датчика может иметь размер и форму, чтобы обеспечивать индукцию тока, проходящего через провод 60, когда устройство 50 подвергается воздействию магнитного поля. Конкретные размеры катушки 50, в том числе диаметр, длина катушки и пространство между кольцевыми частями катушки, могут быть основаны на многих факторах, включая напряженность магнитного поля, целевой анатомии и/или присутствии или потенциальном присутствии вблизи целевой анатомии металлических элементов, вносящих искажения. Настоящее изобретение рассматривает использование других конфигураций катушки, которые позволяют получать в ней индукционный ток при воздействии магнитного поля.
В одном варианте осуществления катушка 50 датчика может быть вставлена внутрь или как-либо иначе объединена с иглой 75 или другим устройством, которое позволяет располагать катушку датчика внутри целевой анатомии, такой как ткань, смежная с органом, и т.д. Например, игла 75 может иметь конический конец 80 для облегчения введения в пациента для достижения целевой анатомии и канал 85 или другое отверстие вдоль его длины для размещения в нем катушки 50 датчика. Канал 85 также позволяет с помощью проводов 95 или других соединений соединять катушку 50 датчика с внешним процессором 11 или другим компьютерным устройством.
Игла 75 может иметь видимую полоску 90 или другую область идентификации. Полоска 90 может быть изготовлена из материала и иметь размер и форму, позволяющие видеть ее во время получения изображения целевой анатомии. Конкретный тип материала, а также его размер и форма могут основываться на многих факторах, включая тип получения изображения, который будет использоваться, и целевую анатомию, которая отображается. Например, полоска 90 может содержать легированный гадолинием материал, когда способом получения изображения является магнитно-резонансная томография. Как другой пример, полоска 90 может содержать пластмассовое или подобное кости вещество достаточной плотности, чтобы обеспечить затухание рентгеновского излучения, когда способом получения изображения является компьютерная томография или получение рентгеновского изображения. В одном варианте осуществления полоска 90 может быть расположена вблизи от центра катушки 50. Расположение полоски относительно катушки 50 датчика может помочь представить положение и ориентацию, которые определяются по индуцированному току в катушке датчика.
В одном варианте осуществления система 300 слежения может содержать процессор 11, соединенный с внутренним маркером 10, например, через провода 95, проходящие сквозь иглу 75, а также генератор 340 поля, который создает магнитное поле в целевой анатомии. Датчик 50 внутреннего маркера 10 может принимать электромагнитные сигналы, генерируемые генератором 340 поля, который может быть расположен вблизи пациента 305, например под кроватью 370 или другой конструкцией, поддерживающей пациента.
В одном варианте осуществления генератор 340 поля может иметь множество антенн с различными ориентациями. Датчик 50 может получать сигналы от антенн в различных местах и ориентациях в целевой анатомии. Из их относительных характеристик сигнала, например относительной мощности сигнала, относительной фазы и т.д., может быть определено местоположение датчика 50 относительно антенн.
Система 300 слежения может также включать в себя один или более внешних маркеров 310, которые могут быть установлены на пациенте 305 вблизи целевой анатомии. Каждый маркер 310 может содержать блок электромагнитного датчика, такой как катушка датчика, связанная с процессором 11. Внешние маркеры 310 могут содержать материал, который может быть виден во время получения изображения. Внутренний маркер 10 и внешние маркеры 310 могут предоставлять процессору 11 информацию о положении и ориентации, основываясь на индуцировании тока в блоке датчика, используя для этого генератор 340 поля. Индуцированный ток в маркерах 10, 310 может быть функцией положения и ориентации датчика 50 относительно генератора 340 поля. Процессор 11 может анализировать ток или данные, представляющие ток, чтобы сделать определение в отношении положения и ориентации. Как будет описано ниже, системой 300 слежения могут использоваться различные количества внутренних маркеров 10 и внешних маркеров 310, в том числе три или более маркеров.
Система 300 слежения может использоваться вместе или может включать в себя способ 350 получения изображения, такой как способ получения изображения с высокой разрешающей способностью, включая сканер 360 компьютерной томографии. Например, изображение целевой анатомии пациента 305 с высокой разрешающей способностью, содержащее внутренний маркер 10, один или более внешних маркеров 310 и окружающую область (например, ткань, органы, сосуды, и т.д.), может быть создано сканером 360 компьютерной томографии и сохранено в памяти изображений компьютерной томографии. Память изображений компьютерной томографии может быть введена в состав рабочей станции 320 и/или может быть отдельным запоминающим устройством и/или устройством обработки. На фиг. 3 обведенное сканирующее устройство 360 компьютерной томографии показано для иллюстративных целей, но настоящее изобретение подразумевает использование различных устройств получения изображения, в том числе движущегося устройства с C-образным кронштейном или открытого MRI. Настоящее изобретение подразумевает использование различных способов получения изображения, одного или в комбинации, включая MRI, ультразвук, рентгеновское излучение, компьютерную томографию и т.д. Настоящее изобретение также рассматривает способ 350 получения изображения, являющийся отдельной системой, основанной на сборе изображения, включая предоперационные изображения и/или изображения, получаемые во время операции.
В одном варианте осуществления процессор 11 может быть процессором системы электромагнитного слежения, который принимает обнаруженный ток от катушек датчиков множества маркеров и в комбинации с информацией от генератора электромагнитного поля вычисляет информацию о положении и ориентации для катушки датчика. Процессор 11 может затем предоставлять информацию о положении и об ориентации другому процессору 320 (например, компьютерной рабочей станции). В другом варианте осуществления изображения от сканера 360 компьютерной томографии могут предоставляться или взаимодействовать напрямую с компьютерной рабочей станцией 320. Точно так же информация о положении и ориентации от процессора 11 может предоставляться на компьютерную рабочую станцию 320, чтобы руководить медицинской процедурой. Примеры вариантов осуществления описывают использование отдельных процессоров 11 и 320 для выполнения обработки сигналов токов датчиков и выполнения регистрации. Однако настоящее изобретение подразумевает использование одиночного процессора или более чем двух процессоров для выполнения этих функции или части этих функций, как это делает компьютерная рабочая станция, которая принимает необработанные текущие данные от маркеров 10, 310 и принимает данные изображения от сканера 360 компьютерной томографии, и затем выполняет регистрацию, основываясь, по меньшей мере частично, на этой информации.
Компьютерная рабочая станция 320 может использовать электромагнитные данные от маркеров 10 и 310 для регистрации электромагнитного пространства вместе с пространством для получения изображения. Полоска 90 внутреннего маркера 10 и каждый из внешних маркеров 310 видны при получении изображения, и они позволяют использовать различные способы регистрации, включая регистрацию по точкам. Например, положение и ориентация маркеров 10, 310 с электромагнитным слежением и их видимость в компьютерном изображении по способу 350 получения изображения могут использоваться для регистрации результатов электромагнитных измерений в системе отсчета изображения компьютерной томографии.
Результирующая регистрация электромагнитного пространства вместе с изображаемым пространством может затем быть использована во время операции для слежения за хирургическим устройством 398, включающим в себя электромагнитные датчики 399. Регистрация может быть использована для передачи результатов электромагнитных измерений датчиков 399 хирургических устройств от электромагнитной системы отсчета в систему отсчета изображения компьютерной томографии, которые могут отображаться на устройстве 330 дисплея. В одном варианте осуществления отображение хирургического устройства 398 посредством использования электромагнитного слежения и получения изображения может производиться в реальном времени. В другом варианте осуществления система 300 может зарегистрировать результаты электромагнитных измерений маркеров 10, 310 и/или хирургического устройства 398 в системе отсчета изображения компьютерной томографии без вмешательства пользователя. В другом варианте осуществления система 300 может графически отображать положение, полученное в результате электромагнитного измерения, наложенное или приложенное к изображению компьютерной томографии так, как это делается посредством использования дисплея 330. В одном варианте осуществления пользователь может принять, отклонить или отредактировать зарегистрированные результаты электромагнитных измерений положения в качестве точной регистрации и затем продолжить хирургическую процедуру.
Настоящее изобретение предполагает другие способы, используемые в дополнение к маркерам 10, 310. Например, примеры вариантов осуществления могут использовать алгоритмы корреляции или обработки изображения для их локализации. Например, один или более признаков, которые появляются в изображении и имеют известное положение, могут быть использованы алгоритмами корреляции изображения, такого как изображение части хирургического устройства 398.
В одном варианте осуществления система 300 слежения может использовать различные компоненты слежения, чтобы следить за хирургическим устройством 398, таким как те, которые предлагаются компаниями Traxtal Inc. или Northern Digital Inc. Слежение за хирургическим устройством 398 может выполняться используя генератор 340 поля и процессор 11, или может выполняться используя другие компоненты, основываясь на регистрации, выполняемой компьютерной рабочей станцией 320.
На фиг. 4 представлен другой пример варианта осуществления внутреннего маркера, который в целом обозначен ссылочной позицией 400. Маркер 400 может содержать один или более компонентов, описанных выше в отношении маркера 10, включая катушку 50 датчика, иглу 75 и полоску 90. Маркер 400 может включать в себя контроллер 495, имеющий беспроводной передатчик. Контроллер 495 может быть оперативно связан с катушкой 50 датчика проводами 95 и может с помощью беспроводных технологий передавать данные местоположения, представляющие индуцированный ток в катушке датчика, приемнику, такому как тот, который оперативно соединяется с процессором 11. В одном варианте осуществления контроллер 495 может создавать данные местоположения, проводя свой собственный анализ индуцированного тока в катушке 50 датчика. Компоненты и способы, используемые для беспроводной передачи данных местоположения, могут изменяться и могут включать в себя радиочастотные сигналы. Контроллер 495 может иметь свой собственный источник электропитания (например, аккумулятор) и/или может быть пассивным устройством, которое питается внешним сигналом, таким как радиочастотный сигнал или другое беспроводное силовое поле.
На фиг. 5 представлен другой внутренний маркер, в целом обозначенный ссылочной позицией 500. Маркер 500 может содержать один или более компонентов, описанных выше со ссылкой на маркер 10, включая иглу 75 и полоску 90. Маркер 500 может предусматривать катушку 550 датчика, которая формируется вдоль наружной поверхности 560 иглы или укладывается в нее (так, чтобы располагаться в канале или канавке, сформированной в наружной поверхности). Катушка 550 может быть подсоединена к проводам 95, которые также укладываются вдоль наружной поверхности 560 иглы или укладываются в нее (так, чтобы располагаться в канале или канавке, сформированной в наружной поверхности) и которые могут подключаться к процессору 11 для подачи на него индуцированного тока. В одном варианте осуществления катушка 550 и/или провода 75 (или их часть) могут быть выполнены в виде печатных проводников вдоль наружной поверхности 560. В этом примере печатные проводники могут затем подключаться к изолированным проводам, например, посредством пайки, которые присоединяются к процессору 11.
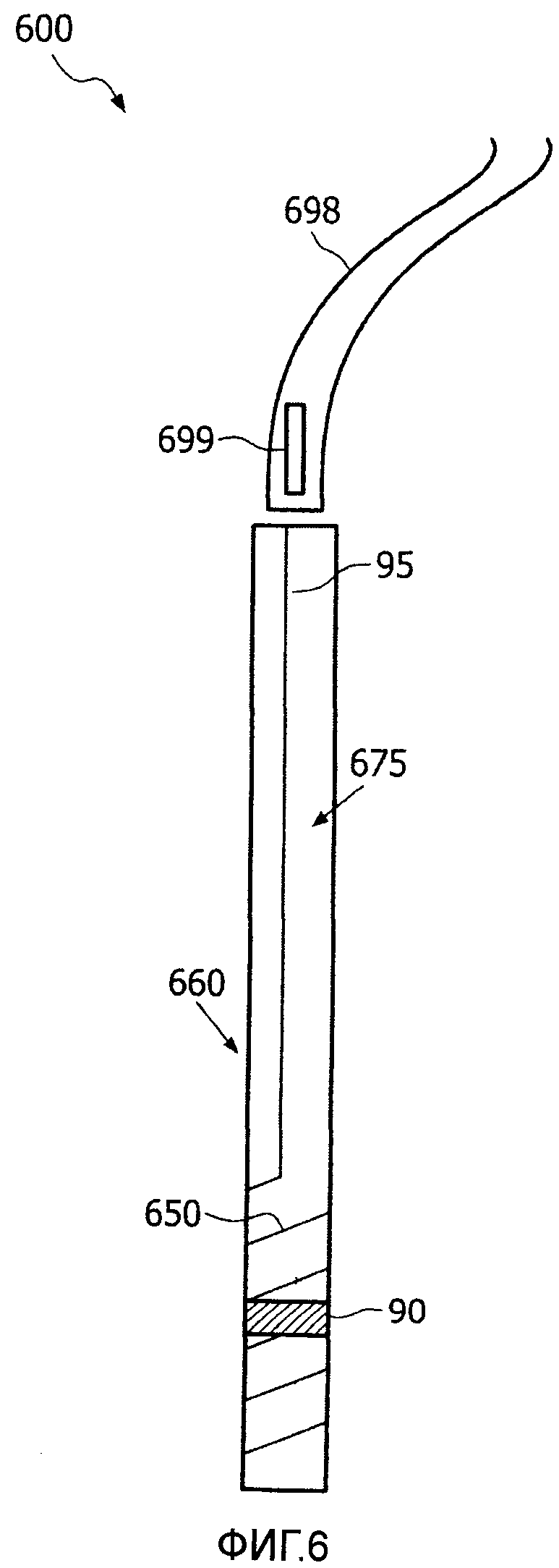
На фиг. 6 представлен катетер, в целом обозначенный ссылочной позицией 600. Катетер 600 может быть пустотелым устройством, позволяющим пропускать через него хирургические инструменты, такие как хирургическое устройство 698. Катетер 600 может содержать в себе один или более компонентов, описанных выше в отношении маркера 10, включая полоску 90. Катетер 600 может предусматривать катушку 650 датчика, которая укладывается вдоль или вкладывается в наружную поверхность 660 корпуса 675 катетера вблизи дистального конца катетера. Катушка 650 может быть подсоединена к проводам 95, которые также укладываются вдоль или вкладываются внутрь наружной поверхности 660 корпуса 675 катетера и которые могут быть соединены с процессором 11 для обеспечения подачи на него индуцированного тока. В одном варианте осуществления катушка 650 и/или провода 95 (или их часть) могут быть печатными проводниками на наружной поверхности 660. В этом примере печатные проводники могут затем быть соединены с изолированными проводами, например, посредством пайки, которые соединяются с процессором 11.
Хирургическое устройство 698 может содержать один или более датчиков 699 слежения, таких как датчик, расположенный на наконечнике или на дистальном конце хирургического устройства так, чтобы устройство могло прослеживаться системой 300. В одном варианте осуществления катетер 600 может быть гибким, в том числе использующим сплавы с памятью формы. В другом варианте осуществления катетер 600 может иметь нелинейную форму с множеством катушек 650 датчиков и полосок 90, расположенных вдоль катетера, например вдоль выступов и впадин по нелинейной длине.
Дополнительно на фиг. 7 показан способ 700 электромагнитного слежения за медицинской процедурой. Способ 700 может использоваться для различных типов лечения, когда расположение медицинского устройства является необходимым критерием процедуры. На этапе 702 внутренний маркер 10 может быть введен в целевую анатомию. Внутренний маркер 10 может иметь размер и форму, которые позволяют вводить непосредственно в целевую анатомию без необходимости применения вспомогательных инструментов, таких как катетер и т.п., хотя настоящее изобретение также подразумевает использование таких вспомогательных инструментов совместно с маркером 10.
На этапе 704 один или более внешних маркеров 310 могут быть установлены на пациенте 305 вблизи целевой анатомии и имплантированного внутреннего маркера 10. На этапе 706 изображение целевой анатомии с высокой разрешающей способностью, в том числе внутренних и внешних маркеров 10, 310 и окружающей ткани, может быть сформировано устройством получения изображения и передано на компьютерную рабочую станцию 320. На этапе 708 положение и ориентация каждого из маркеров 10, 310 могут быть получены используя систему слежения, через индуцирование тока в каждом из маркеров при использовании генератора 340 поля и затем, анализируя ток, включая его силу и фазу, чтобы определить положение и ориентацию маркеров, например, посредством использования процессора 11. Процессор 11 может затем передать эту информацию на компьютерную рабочую станцию 320.
На этапе 710 компьютерная рабочая станция 320 может использовать электромагнитные данные от маркеров 10, 310, обработанные процессором 11, и в комбинации с визуальными данными от полоски 90 и внешних маркеров в изображении компьютерной томографии может зарегистрировать электромагнитное пространство вместе с изображаемым пространством. Процесс регистрации может быть основан на различном количестве маркеров, включая три или более маркеров. Эти три или более маркеров могут создавать различные комбинации внутренних и внешних маркеров 10, 310, содержащие один внутренний маркер 10 и два или более внешних маркеров 310. На этапе 712 медицинская процедура выполняется используя хирургическое устройство, за которым ведется электромагнитное слежение.
В одном варианте осуществления процесс регистрации может быть регистрацией по точкам. Как только регистрация произошла, электромагнитное пространство может затем быть использовано для слежения за медицинским устройством 398 во время медицинской процедуры посредством использования электромагнитных датчиков 399, присоединенных к устройству. В другом варианте получение изображения может быть произведено во время медицинской процедуры и электромагнитное слежение за медицинским устройством 398 объединяется с получением изображения для их отображения на дисплее для врача. Точность электромагнитного слежения за медицинским устройством 398 может быть повышена посредством применения процесса регистрации, который использует внутренний маркер 10 и внешние маркеры 310.
Настоящее изобретение может обеспечивать внутренний активный опорный маркер, который будет использоваться при минимально инвазивных медицинских процедурах и который имеет катушку датчика, маркированную так, чтобы она была видна на медицинском изображении, и которая обеспечивает считывания положения в электромагнитном пространстве системы слежения. Внутренний активный опорный маркер может быть размещен в теле пациента. Маркер может содержать катушку датчика, распознаваемую электромагнитной системой слежения. Центральная область катушки датчика может быть маркирована так, чтобы она была видна на медицинском изображении. Активный опорный маркер может быть интегрирован в механический инструмент так, чтобы он мог вводиться в тело. Механический инструмент может также обеспечивать канал для проводов катушки датчика. Электромагнитная система слежения может вычислять положение катушки датчика и из него положение медицинского инструмента прослеживается электромагнитной системой слежения. Активный опорный маркер может быть видимым в изображаемом пространстве и может давать данные положения в пространстве электромагнитной системы слежения, позволяя регистрацию обоих пространств. Активный опорный маркер может также компенсировать ошибку положения в пространстве электромагнитной системы слежения в результате искажения электромагнитного поля, вызванного металлом внутри или вблизи пространства электромагнитной системы слежения.
Изобретение, включающее в себя этапы способов, описанные выше, может быть реализовано аппаратным обеспечением, программным обеспечением или комбинацией аппаратного и программного обеспечения. Изобретение может быть реализовано централизованным способом в одной компьютерной системе или распределенным способом, когда различные элементы разбросаны по нескольким соединенным компьютерным системам. Пригодным для этих целей является любой вид компьютерной системы или другого устройства, приспособленных для выполнения описанных выше способов. Типичной комбинацией аппаратного обеспечения и программного обеспечения может быть универсальная компьютерная система с компьютерной программой, которая, когда загружена и выполняется, управляет компьютерной системой так, что она выполняет описанные в данном описании способы.
Изобретение, включающее в себя этапы описанных выше способов, может быть реализовано в компьютерном программном продукте. Компьютерный программный продукт может содержать считываемый компьютером носитель, в который введена компьютерная программа, содержащая исполняемую компьютером программу управления компьютерным устройством или компьютерной системой для выполнения различных процедур, процессов и описанных здесь способов. Компьютерная программа в представленном контексте означает любое выражение, на любом языке, программу или условную запись набора команд, предназначенных, чтобы инструктировать систему, имеющую возможность обработки информации, выполнять определенную функцию непосредственно или после одной или обеих из следующих операций: а) преобразование в другой язык, программу или условную запись; b) воспроизведение в различной материальной форме.
Иллюстрации вариантов осуществления, описанные здесь, предназначены для обеспечения общего понимания структуры различных вариантов осуществления и не предназначены быть полным описанием всех элементов и признаков устройств и систем, которые могли бы использовать описанные здесь структуры. После рассмотрения упомянутого выше описания специалистам в данной области техники будут очевидны многочисленные другие варианты осуществления. Другие варианты осуществления могут быть использованы и построены на их основе таким образом, чтобы структурные и логические замены и изменения могли быть сделаны, не отступая от объема настоящего раскрытия. Чертежи также являются простыми иллюстрациями и не могут быть вычерчены в масштабе. Определенные их пропорции могут быть преувеличены, тогда как другие могут быть минимизированы. Соответственно описание и чертежи должны рассматриваться в иллюстративном, но не в ограничительном смысле.
Таким образом, хотя здесь были показаны и описаны конкретные варианты осуществления, следует понимать, что любая структура, считающаяся пригодной для решения той же самой задачи, может заменять собой конкретные раскрытые варианты осуществления. Подразумевается, что настоящее изобретение содержит в себе любые и все модификации или изменения различных вариантов осуществления. Комбинации упомянутых выше вариантов осуществления и других вариантов осуществления, не описанных здесь конкретно, должны быть очевидны специалистам в данной области техники после рассмотрения упомянутого выше описания. Поэтому подразумевается, что изобретение не ограничивается определенным вариантом/ами осуществления, раскрытым в качестве наилучшего, подразумеваемого для выполнения настоящего изобретения, и настоящее изобретение будет содержать все варианты осуществления, попадающие в пределы объема прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ БРАХИТЕРАПИИ | 2009 |
|
RU2515527C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 2008 |
|
RU2483674C2 |
| УЗЕЛ МАГНИТНО-РЕЗОНАНСНОЙ КАТУШКИ ДЛЯ ФИДУЦИАЛЬНЫХ МАРКЕРОВ | 2014 |
|
RU2665343C1 |
| ТЕРАПЕВТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ ПАЦИЕНТА С ИСПОЛЬЗОВАНИЕМ МАГНИТНЫХ НАНОЧАСТИЦ | 2010 |
|
RU2545896C2 |
| СОВМЕЩЕНИЕ СИСТЕМ КООРДИНАТ | 2007 |
|
RU2445007C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ БИОПСИИ | 2009 |
|
RU2510699C2 |
| УСТРОЙСТВО СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ | 2014 |
|
RU2687883C2 |
| УСТРОЙСТВО ОКАЗАНИЯ ПОМОЩИ ПОЛЬЗОВАТЕЛЮ ВО ВРЕМЯ ХИРУРГИЧЕСКОЙ ПРОЦЕДУРЫ | 2014 |
|
RU2687826C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ЛОКАЛЬНОЙ ПОГРЕШНОСТИ В ЭЛЕКТРОМАГНИТНЫХ СИСТЕМАХ СЛЕЖЕНИЯ | 2007 |
|
RU2434578C2 |
| ЛИНЕЙНЫЙ УСКОРИТЕЛЬ, НАПРАВЛЯЕМЫЙ МАГНИТНЫМ РЕЗОНАНСОМ | 2013 |
|
RU2631910C2 |

Система слежения (300) за целевой анатомией пациента (305) может содержать первый маркер (10), имеющий размер и форму, пригодные для введения в пациента, чтобы достигнуть целевой анатомии, причем первый маркер имеет первый электромагнитный (EM) датчик (50) и участок, обеспечивающий изображение (90), множество вторых маркеров (310), имеющих размеры и формы для присоединения к пациенту вблизи целевой анатомии, причем каждый из вторых маркеров имеет второй электромагнитный датчик и является обеспечивающим изображение, генератор (340) поля, выполненный с возможностью приложения магнитного поля к целевой анатомии и индуцирования тока в первом и вторых датчиках, и процессор (11, 320), имеющий контроллер, выполненный с возможностью определения положений первого и вторых маркеров, основываясь на индуцированных токах. 2 с. и 13 з.п. ф-лы, 7 ил.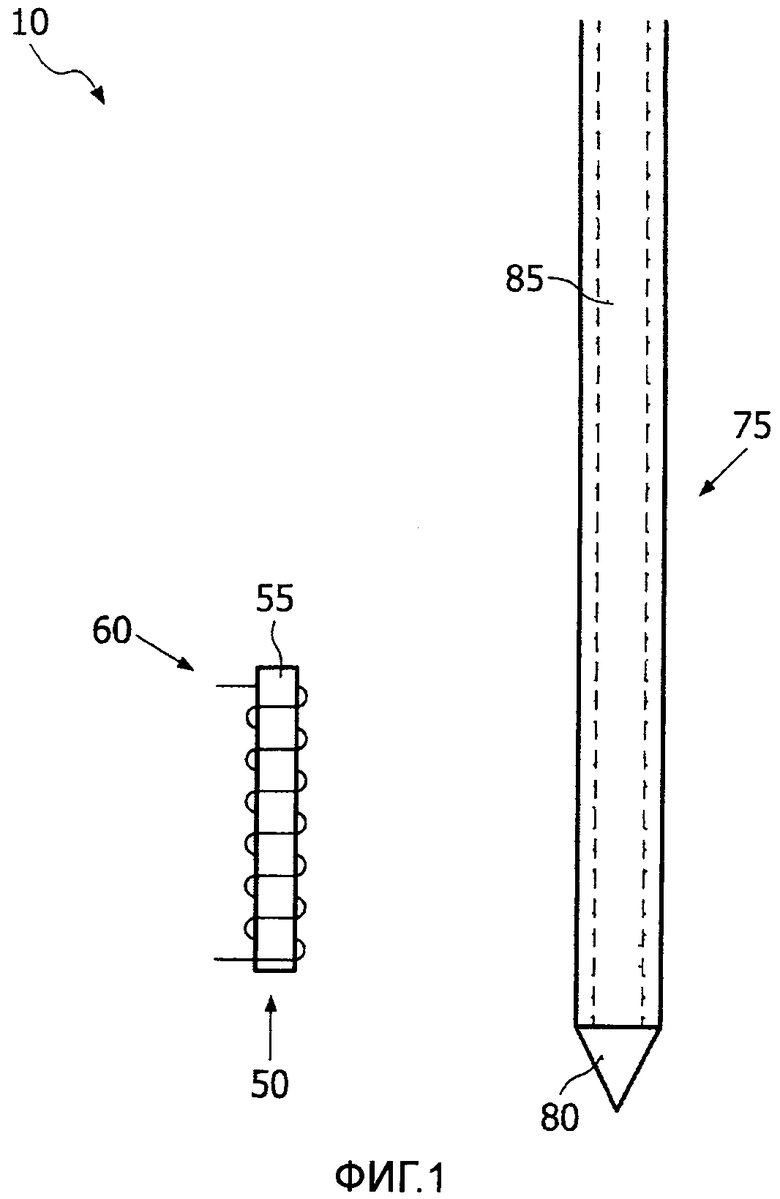
1. Способ слежения за медицинским устройством, содержащий этапы, на которых:
обеспечивают, по меньшей мере, три маркера для регистрации электромагнитного пространства целевой анатомии вместе с изображаемым пространством целевой анатомии, причем, по меньшей мере, три маркера, содержат первый маркер (10) и второй маркер (50), при этом, по меньшей мере, три маркера имеют участки, обеспечивающие изображение, видимые во время получения изображения целевой анатомии;
помещают первый маркер в целевую анатомию пациента (305), причем первый маркер имеет первый электромагнитный (ЕМ) датчик (50) и участок (90), обеспечивающий изображение;
размещают второй маркер (310) на пациенте вблизи целевой анатомии, причем второй маркер имеет второй электромагнитный датчик и является обеспечивающим изображение;
индуцируют ток в первом и втором датчиках, используя генератор (340) поля, внешний по отношению к пациенту;
определяют положения и ориентации первого и второго маркеров, основываясь на индуцированных токах;
выполняют получения изображения целевой анатомии, которое содержит визуализацию участка, обеспечивающего изображение, и второго маркера; и
регистрируют электромагнитное пространство целевой анатомии вместе с изображаемым пространством целевой анатомии, основываясь, по меньшей мере, частично на определенных положениях и ориентациях первого и второго маркеров и визуализации участков, обеспечивающих изображение, первого и второго маркеров.
2. Способ по п.1, дополнительно содержащий этапы, на которых:
размещают третий маркер из, по меньшей мере, трех маркеров на пациенте вблизи целевой анатомии, причем третий маркер имеет третий электромагнитный датчик и является обеспечивающим изображение;
выполняют регистрацию электромагнитного пространства целевой анатомии вместе с изображаемым пространством целевой анатомии, основываясь, по меньшей мере, частично, на определенных положениях и ориентациях первого, второго и третьего маркеров и визуализации изображаемого участка и второго и третьего маркеров;
помещают медицинское устройство (398) в целевую анатомию; и
осуществляют слежение за положениями медицинского устройства, используя генератор (340) поля и, по меньшей мере, один электромагнитный датчик (399), соединенный с медицинским устройством.
3. Способ по п.2, дополнительно содержащий этап, на котором накладывают прослеженные положения медицинского устройства (398) на изображение целевой анатомии.
4. Способ по п.3, дополнительно содержащий этап, на котором отображают наложенные изображения в режиме реального времени.
5. Способ по п.1, в котором первый маркер (10) является иглой, имеющей конусный дистальный конец (80) с размером и формой, приспособленными для введения через ткань пациента (305) в целевую анатомию.
6. Способ по п.5, в котором первый датчик (50) сконфигурирован в виде катушки, указанная катушка расположена в канале (85), сформированном в игле (10).
7. Способ по п.1, дополнительно содержащий этап, на котором подают индуцированный ток первого маркера (10) на процессор (11) посредством проводов (95), проходящих от проксимального конца первого маркера, причем процессор определяет положение и ориентацию первого маркера.
8. Способ по п.1, дополнительно содержащий этап, на котором выполняют получение изображения, используя, по меньшей мере, компьютерную томографию или магнитно-резонансную томографию, или ультразвук.
9. Способ по п.1, дополнительно содержащий этап, на котором осуществляют беспроводную передачу данных, представляющих индуцированный ток, на процессор (11), внешний по отношению к пациенту (305).
10. Система (300) слежения для слежения за медицинским устройством внутри целевой анатомии пациента (305), содержащая:
первый маркер (10), имеющий размер и форму для введения в пациента, выполненный с возможностью достижения целевой анатомии, причем первый маркер имеет первый электромагнитный датчик (50) и участок (90), обеспечивающий изображение, видимый во время получения изображения (визуализации) целевой анатомии;
множество вторых маркеров (310), имеющих размер и форму для присоединения (прилипания) к пациенту вблизи целевой анатомии, причем каждый из вторых маркеров имеет второй электромагнитный датчик и является обеспечивающим изображение во время получения изображения (визуализации) целевой анатомии;
генератор (340) магнитного поля, выполненный с возможностью приложения магнитного поля к целевой анатомии и индуцирования тока в первом и втором датчиках; и
процессор (11, 320), имеющий контроллер, выполненный с возможностью определения положений и ориентации первого и второго маркеров, основываясь на индуцированных токах.
11. Система по п.10, дополнительно содержащая другой процессор (320), имеющий контроллер, выполненный с возможностью:
получения изображений целевой анатомии, путем визуализации первого визуализируемого участка, и вторых маркеров; и
регистрации электромагнитного пространства целевой анатомии вместе с изображаемым пространством целевой анатомии, основываясь на определенных положениях и ориентациях первого и второго маркеров (10, 310) и визуализации обеспечивающих изображение вторых маркеров и визуализируемого участка первого маркера.
12. Система по п.10, в которой контроллер процессора (11, 320) выполнен с возможностью:
получения изображения целевой анатомии, которое содержит визуализацию участков, обеспечивающих изображение, вторых маркеров и участка, обеспечивающего изображение, первого маркера, и
регистрации электромагнитного пространства целевой анатомии вместе с изображаемым пространством целевой анатомии, основываясь на определенных положениях и ориентациях первого и второго маркеров, и визуализации участков, обеспечивающих изображение, вторых маркеров и участка, обеспечивающего изображение, первого маркера.
13. Система по п.12, дополнительно содержащая хирургическое устройство (398), имеющее третий датчик (399), при этом генератор (340) магнитного поля выполнен с возможностью индуцирования тока в третьем датчике и при этом процессор (11, 320) выполнен с возможностью слежения за положением хирургического устройства, основываясь на индуцированном токе в третьем датчике и регистрации между электромагнитным пространством и изображаемым пространством.
14. Система по п.13, в которой хирургическое устройство (398) содержит катетер и третий датчик (399) расположен на дистальном конце катетера.
15. Система по п.10, в которой визуализируемый участок расположен поперек первого электромагнитного датчика, оставляя остальные участки первого электромагнитного датчика не визуализируемыми на противоположных сторонах визуализируемого участка.
| US2006084867 A1 (TREMBLAY BRIAN M ET AL), 20.04.2006, описание | |||
| US2007135803 A1 (BELSON AMIR), 14.06.2007, [0568]-[0694] | |||
| US2004002643 A1 (HASTINGS ROGER N ET AL), 01.01.2004, [0013]-[0051] | |||
| US6618612 B1 (ACKER DAVID E ET AL), 09.09.2003, кол.5-кол.13 | |||
| US2002143317 A1 (GLOSSOP NEIL DAVID), 03.10.2002, [0008]-[0101] | |||
| МИКРОВОЛНОВОЕ ТОМОГРАФИЧЕСКОЕ УСТРОЙСТВО ДЛЯ СПЕКТРОСКОПИИ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2238033C2 |

