Изобретение относится к области радиолокации и может быть использовано в береговых радиолокаторах надводной обстановки.
Известно устройство обработки радиолокационных сигналов, входящее в состав радиолокатора, который может быть и береговым, навигационным, представленное в книге «Радиотехнические системы», Ю.М.Казаринов, М., Высшая школа, 1990 г., стр.194-197. В его состав входят передающее и приемное устройство, синхронизатор, датчик азимута, индикатор, счетчик интервала, блок элементов совпадения и блок вторичной обработки. Синхронизатор выдает синхроимпульсы как команды на излучение зондирующего импульса передающему устройству и в счетчик интервала, считающего интервал между следующими друг за другом синхроимпульсами с синхронизатора и выдающего в процессе счета параллельный код в блок элементов совпадения, который пропускает его при наличии сигнала с приемного устройства в виде кода дальности в индикатор, куда также поступает код об азимуте с датчика азимута. Информация о дальности и азимуте также поступает в блок вторичной обработки, где происходит построение направлений смещения надводных объектов. Устройство можно использовать при осуществлении швартовки. Однако безопасность плавания при швартовке обеспечивается недостаточно.
Известно устройство обработки сигналов навигационного радиолокатора, который может размещаться и на берегу, представленное в книге «Вооружение и военно-морская техника России», М., 2003 г., «Военный парад», стр.177. Оно состоит из тех же узлов, что и вышеупомянутый аналог, но выполнено на более совершенной элементной базе. Однако так же не обеспечивается безопасность движения судна при осуществлении швартовки. С помощью предлагаемого устройства увеличивается безопасность при осуществлении швартовки.
Достигается это введением элемента сравнения кодов триггера, второго блока элементов совпадения постоянного запоминающего устройства, датчика координат места швартовки, передатчика курса и дальности до места швартовки, приемника радиолокационного излучения, указателя курса и дальности до места швартовки, приемника курса и дальности до места швартовки, передатчика ответного сигнала, приемника ответного сигнала, при этом группа выходов счетчика интервала соединена с первой группой входов элемента сравнения кодов, имеющего вторую группу входов, соединенную через постоянное запоминающее устройство с группой выходов датчика азимута и имеющего выход, соединенный с первым входом триггера, второй вход и выход которого соответственно соединены с выходом синхронизатора и со вторым входом блока элементов совпадения, а третья группа входов блока вторичной обработки и группа выходов соответственно соединены с группой выходов датчика координат места швартовки и с группой входов передатчика курса и дальности до места швартовки, имеющего электромагнитный выход, связанный с электромагнитным входом приемника курса и дальности до места швартовки, группа выходов которого соединена с группой входов второго блока элементов совпадения, имеющего группу выходов и вход, соответственно соединенные с группой входов указателя курса дальности до места швартовки и с выходом приемника радиолокационного излучения, соединенного так же с входом передатчика ответного сигнала и имеющего электромагнитный вход, связанный с электромагнитным выходом передающего устройства, причем передатчик ответного сигнала имеет электромагнитный выход, связанный с электромагнитным входом приемника ответного сигнала, выход которого соединен с входами индикатора и блока вторичной обработки.
На фиг.1 и в тексте приняты следующие обозначения:
1 - синхронизатор
2 - передающее устройство
3 - приемное устройство
4 - счетчик интервала
5 - элемент сравнения кодов
6 - триггер
7 - блок элементов совпадения
8 - постоянное запоминающее устройство
9 - датчик азимута
10 - индикатор
11 - датчик координат места швартовки
12 - блок вторичной обработки
13 - передатчик курса и дальности до места швартовки
14 - приемник ответного сигнала
15 - приемник курса и дальности до места швартовки
16 - передатчик ответного сигнала
17 - приемник радиолокационного излучения
18 - блок элементов совпадения
19 - указатель курса и дальности до места швартовки,
при этом выход синхронизатора 1 соединен с входами: передающего устройства 2, счетчика интервала 4 и с вторым входом триггера 6, имеющего первый вход и выход, соответственно соединенные с выходом элемента сравнения кодов 5 и с вторым входом блока элемента совпадения 7, имеющего первый вход, группу входов и группу выходов, соответственно соединенные с выходом приемного устройства 3, с группой выходов счетчика интервала 4 и с первыми группами входов блока вторичной обработки 12 и индикатора 10, имеющего вторую группу входов, соединенную с группой выходов датчика азимута 9, соединенной через постоянное запоминающее устройство 8, через элемент сравнения кодов 5 с группой выходов счетчика интервала 4 и со второй группой входов блока вторичной обработки 12, имеющего третью группу входов и группу выходов, соответственно соединенные с группой выходов датчика координат места швартовки 11 и с группой входов передатчика курса и дальности до места швартовки 13, имеющего электромагнитный выход, связанный с электромагнитным входом приемника курса и дальности до места швартовки 15, группа выходов которого соединена с группой входов блока элементов совпадения 18, имеющего группу выходов и вход, соответственно соединенные с группой входов указателя курса и дальности до места швартовки 19 и с выходом приемника радиолокационного излучения 17, имеющего электромагнитный вход, связанный с электромагнитным выходом передающего устройства 2, а вышеупомянутый выход приемника радиолокационного излучения 17 соединен так же с входом передатчика ответного сигнала 16, электромагнитный выход которого связан с электромагнитным входом приемника ответного сигнала 14, имеющего выход, соединенный с входами блока вторичной обработки 12 и индикатора 10.
Работа устройства осуществляется следующим образом.
Синхронизатор 1 выдает синхроимпульсы как команды на излучение зондирующих импульсов длительностью, например, 0,05-0,1 мксек, передающему устройству 2. В зависимости от характера использования может быть обеспечено вращение луча в секторном или круговом режиме обзора. При этом расстояние устройства до береговой линии на разных азимутах может иметь разное значение. Синхроимпульсы также поступают в счетчик интервала 4, считающий временной интервал между следующими друг за другом синхроимпульсами и выдающий параллельный код в блок элементов совпадения 7, который пропускает его при поступлении на его первый вход электрического сигнала с приемного устройства 3, преобразованного из отраженного от объекта электромагнитного сигнала, и при поступлении на его второй вход сигнала с триггера 6. Триггер устанавливается в единичное состояние после поступления сигнала на первый вход с элемента сравнения кодов 5 и устанавливается в нулевое состояние после поступления на его второй вход сигнала с синхронизатора 1. Элемент сравнения 5 сработает при равенстве кодов, поступающих со счетчика 4 и постоянного запоминающего устройства 8, где зашиты коды дальности до береговой линии, соответствующие определенным азимутам. Поэтому при поступлении значения соответствующего азимута с датчика азимута 9 в постоянное запоминающее устройство 8, с него считывается соответствующая дальность до берега в элемент сравнения кодов 5, и как только эта дальность сравняется с кодом со счетчика 4, элемент 5 сработает. Таким образом, дальность будет определяться только до тех объектов, которые находятся на акватории, т.е. на водной поверхности. Это исключит ошибки при определении дальности на индикаторе 10 до плавсредств, находящихся у мест швартовки, так как ближе их отображение не будет иметь место на индикаторе 10, куда поступает информация о дальности с блока элемента совпадения 7 и об азимуте с датчика азимута 9. От блока 7 и от датчика 9 также поступает информация в блок вторичной обработки 12, который осуществляет построение направлений движения объектов, а также определяет их протяженность. В блок вторичной обработки также поступает код места швартовки судна с датчика координат места швартовки 11. При этом место швартовки определяется с помощью индикатора 10. Пример конкретного исполнения блока вторичной обработки представлен в книге «Радиотехнические системы», Пестряков В.П. и др., 1985 г., стр.219. Анализируя информацию, блок вторичной обработки 12 также определяет курс судна и его дальность до места швартовки и выдает параллельный код, несущий в себе эту информацию. Выдача информации блоком 12 осуществляется в момент очередного поступления на него кода дальности с блока элемента совпадения 7, т.е. в момент облучения передающим устройством 2 судна в процессе вращения луча и получения разрешения с приемника ответного сигнала 14, поэтому другие плавающие объекты, следующие к месту швартовки, облучаются в разное время, так как находятся на разных азимутальных направлениях. Информация излучается с помощью передатчика курса и дальности до места швартовки 13. Последний осуществляет преобразование электрических сигналов с блока вторичной обработки 12 в электромагнитные, поступающие в приемник курса и дальности до места швартовки 15, размещенного на корабле, где осуществляется преобразование электромагнитных сигналов в электрические и выдача кода курса и дальности до места швартовки в блок элементов совпадения 18. Пример конкретного исполнения передатчика 13 и приемника 15 представлен в книге «Радиоэлектронная промышленность России», ООО ИД «Военный парад», М., 2010 г., стр.367-368. Блок элементов совпадения 18 пропускает информацию при поступлении сигнала с приемника радиолокационного излучения 17 в указатель курса и дальности до места швартовки 19 в момент облучения приемника 17 вращающимся лучом передающего устройства 2. Однако информация с блока вторичной обработки 12 выдается только при условии поступления ответного электромагнитного сигнала с передатчика ответного сигнала 16 в момент облучения вращающимся лучом приемника радиолокационного облучения 17, который выдает также электрический сигнал в вышеупомянутый передатчик 16, преобразующий его в электромагнитный, поступающий в приемник ответного сигнала 14, где преобразуется в электрический, поступающий так же в момент облучения судна вращающимся лучом на входы блока вторичной обработки 12 и в индикатор 10, где фиксируется в момент отображения объекта. При этом только после поступления этого сигнала блок 12 выдает информацию в передатчик 13.
Пример конкретного исполнения передатчика 16 и приемника 14 аналогичен вышеупомянутому в книге «Радиоэлектронная промышленность в России». Движение к месту швартовки может осуществляться по определенной траектории, задаваемой вышеупомянутым блоком вторичной обработки 12 в зависимости от расположения судна. Таким образом, в предлагаемом устройстве создается возможность выдавать информацию на многие корабли, находящиеся на акватории, и обеспечить их швартовку. Предлагаемое устройство можно также использовать для предупреждения столкновений. Таким образом, использование устройства обеспечивает безопасность плавания, а следовательно, и дает экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2507528C1 |
| ВЫСОТОМЕР | 2012 |
|
RU2501036C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ВОДНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2506539C1 |
| ТРЕХКООРДИНАТНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2510889C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2013 |
|
RU2515291C1 |
| ОПТИКО-ЛОКАЦИОННОЕ УСТРОЙСТВО | 2013 |
|
RU2518533C1 |
| АККУСТИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2013 |
|
RU2525472C1 |
| СИСТЕМА РАДИОСВЯЗИ | 2013 |
|
RU2545513C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2073881C1 |
| ЗАГОРИЗОНТНЫЙ РАДИОЛОКАТОР | 2013 |
|
RU2515610C1 |
Изобретение относится к области радиолокации и может быть использовано в береговых радиолокаторах надводной обстановки. Технический результат заключается в увеличении безопасности при осуществлении швартовки. Для этого устройство содержит синхронизатор, передающее устройство, приемное устройство, счетчик интервала, блок элементов совпадения, датчик азимута, индикатор и блок вторичной обработки, а также дополнительно введенные элемент сравнения кодов, триггер, второй блок элементов совпадения, постоянное запоминающее устройство, датчик координат места швартовки, передатчик курса и дальности до места швартовки, приемник радиолокационного излучения, приемник курса и дальности до места швартовки, указатель курса и дальности до места швартовки, передатчик ответного сигнала и приемник ответного сигнала. 1 ил. 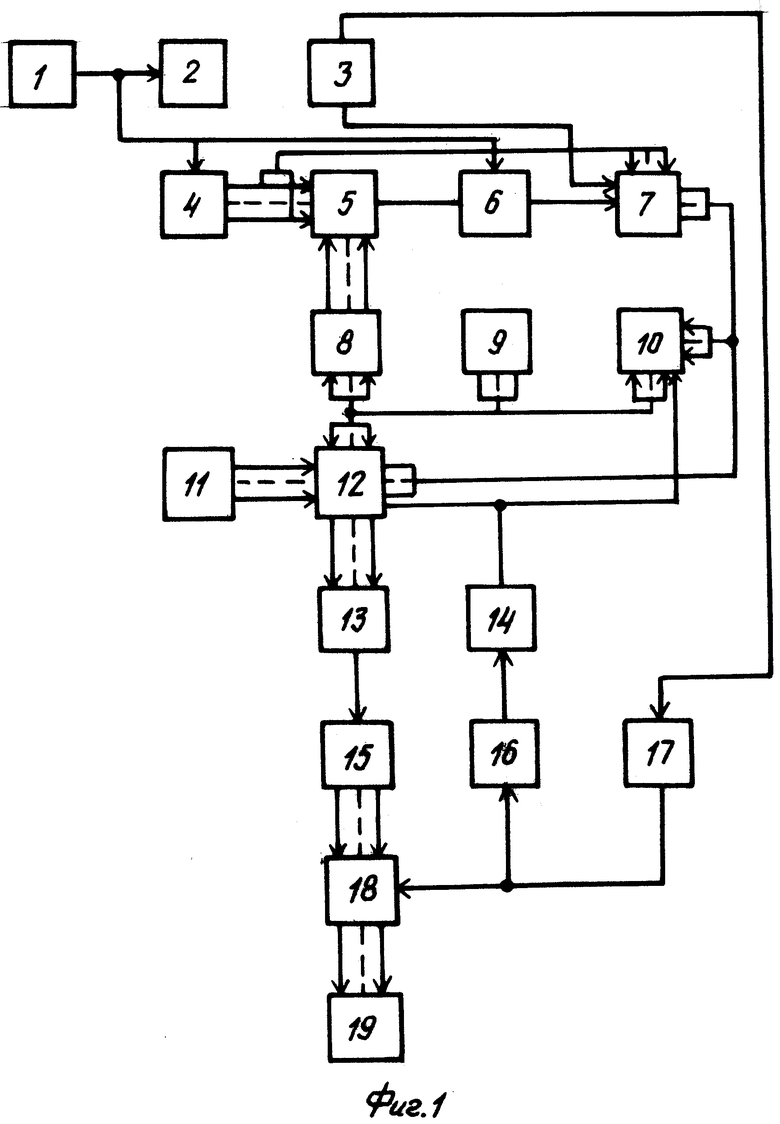
Устройство обработки сигналов берегового навигационного радиолокатора, состоящего из синхронизатора, передающего устройства, приемного устройства, счетчика интервала, блока элементов совпадения, датчика азимута, индикатора и блока вторичной обработки, где выход синхронизатора соединен с входом передающего устройства и с входом счетчика интервала, имеющего группу выходов, соединенную с группой входов блока элементов совпадения, имеющего первый вход и группу выходов, соответственно соединенные с выходом приемного устройства и с первой группой входов индикатора и первой группой входов блока вторичной обработки, вторая группа входов которого соединена с группой выходов датчика азимута, соединенного также со второй группой входов индикатора, отличающееся тем, что вводится элемент сравнения кодов, триггер, второй блок элементов совпадения, постоянное запоминающее устройство, датчик координат места швартовки, передатчик курса и дальности до места швартовки, приемник радиолокационного излучения, приемник курса и дальности до места швартовки, указатель курса и дальности до места швартовки, передатчик ответного сигнала, приемник ответного сигнала, при этом группа выходов счетчика интервала соединена с первой группой входов элемента сравнения кодов, имеющего вторую группу входов, соединенную через постоянное запоминающее устройство с группой выходов датчика азимута, и имеющего выход, соединенный с первым входом триггера, второй вход и выход которого соответственно соединены с выходом синхронизатора и со вторым входом блока элементов совпадения, а третья группа входов блока вторичной обработки и группа выходов соответственно соединены с группой выходов датчика координат места швартовки и с группой входов передатчика курса и дальности до места швартовки, имеющего электромагнитный выход, связанный с электромагнитным входом приемника курса и дальности до места швартовки, группа выходов которого соединена с группой входов второго блока элементов совпадения, имеющего группу выходов и вход, соответственно соединенные с группой входов указателя курса дальности до места швартовки и с выходом приемника радиолокационного излучения, соединенного также с входом передатчика ответного сигнала, и имеющего электромагнитный вход, связанный с электромагнитным выходом передающего устройства, причем передатчик ответного сигнала имеет электромагнитный выход, связанный с электромагнитным входом приемника электромагнитного излучения, выход которого соединен с входами индикатора и блока вторичной обработки.
| Казаринов Ю.М | |||
| Радиотехнические системы | |||
| - М.: Высшая школа, 1990, с.194-197 | |||
| СПОСОБ КОНТРОЛЯ ПОДХОДА К ПРИЧАЛУ ЗАДАННОЙ ДЛИНЫ L СУДНА | 1992 |
|
RU2018862C1 |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК | 2002 |
|
RU2234109C1 |
| Челнок для трубчатых початков автоматических ткацких станков | 1947 |
|
SU82345A1 |
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2000 |
|
RU2170444C1 |
| US 6249241 B1, 19.06.2001 | |||
| Вырубной штамп для пластических масс | 1929 |
|
SU26054A1 |
| US 4510496 A, 09.04.1985 | |||
| US 2005122250 A1, 09.06.2009. | |||

