Известно оптико-локационное устройство, изложенное в патенте №2288483, автор Часовской А.А., от 27 ноября 2006 года, БИ №33 под названием «Устройство обработки локационных сигналов». Его можно представить и как оптико-локационное устройство. В нем используются узлы, выполняющие функции датчика дальности и угловых координат, состоящего из инфракрасных и радиолокационных элементов, осуществляющих поиск и слежение, и выдается значение дальности и угловых координат в блок вторичной обработки, который может выделять комету или болид и выдавать целеуказания оптическим средствам. Аналогичная аппаратура может быть размещена и в космическом летательном аппарате. Однако устройство не способно осуществить поражение кометы или болида, угрожающего Земле.
Известно оптико-локационное устройство, изложенное в книге «Авиация ПВО России и научно-технический прогресс». - М.: Дрофа, 2005 г., Е.А.Федосова, стр.495, 496. В нем также используется датчик дальности и угловых координат, представляющий из себя трехкоординатный обнаружитель, состоящий из инфракрасных и радиолокационных узлов. Он может предварительно получать целеуказания от наземных средств и быть размещен и в космических летательных аппаратах, способных перемещаться в космическом пространстве. Угловые координаты и дальность поступают в блок вторичной обработки, который может выделять болид или комету, угрожающую планете, по их характеристикам и осуществлять автосопровождение. При этом постоянно выдаются угловые координаты в следующую платформу, жестко связанную с лазерным дальномером.
Однако вероятность поражения объекта также отсутствует. С помощью предлагаемого устройства обеспечивается поражение кометы. Достигается это введением непрерывного лазера увеличенной мощности, жестко связанного со следящей платформой, блока управления излучением лазера, блока сравнения кодов и элемента совпадения, при этом выход и третья группа выходов блока вторичной обработки соответственно соединены с входом лазерного передатчика и с первой группой входов блока сравнения кодов, выход и вторая группа входов которого соответственно соединены с первым входом элемента совпадения и с группой выходов лазерного дальномера, соединенного также с группой входов блока управления излучением лазера, имеющего выход, соединенный с вторым с входом элемента совпадения, выход которого соединен с входом непрерывного лазера увеличенной мощности, жестко связанного со следящей платформой.
На фиг. 1 и в тексте приняты следующие обозначения
1 - блок вторичной обработки
2 - следящая платформа
3 - непрерывный лазер увеличенной мощности
4 - лазерный дальномер
5 - датчик дальности и угловых координат
6 - элемент совпадения
7 - блок сравнения кодов
8 - блок управления излучением лазера,
ри этом первая, вторая и третья группы выходов датчика дальности и угловых координат 5 соответственно соединены с первой, второй и третьей группами входов блока вторичной обработки 1, имеющего выход и первую, вторую и третью группы выходов, соответственно соединенные с входом лазерного передатчика 4, с первой и второй группами входов следящей платформы 2 и с первой группой входов блока сравнения кодов 7, имеющего выход и вторую группу входов, соответственно соединенные с первым входом элемента совпадения 6 и с группой выходов лазерного дальномера 4, соединенной также с группой входов блока управления излучением лазера 8, выход которого соединен с вторым входом элемента совпадения 6, имеющего выход, соединенный с входом непрерывного лазера увеличенной мощности 3, жестко связанного с следящей платформой 2 и лазерным дальномером 4.
Работа устройства осуществляется следующим образом.
С помощью датчика дальности и угловых координат 5 осуществляется поиск и слежение за объектом, имеющим характеристики, характерные для кометы или болида, следующего к Земле. В состав устройства входят радиолокационные и инфракрасные узлы. Датчик 5 может получать целеуказания с наземных устройств обнаружения кометы или болида.
Коды, характеризующие дальность, азимут и угол места с первой, второй и третьей группы выходов блока 5, поступают на первую, вторую и третью группу входов блока вторичной обработки 1. Последняя осуществляет построение траектории движения кометы или болида. При этом могут выдаваться угловые координаты с блока 1 в исполнительный механизм летательного космического аппарата, на котором размещено устройство для ориентации его движения в сторону обнаруженной кометы или болида. После подлета к космическому объекту скорость аппарата устанавливается равной скорости этого объекта (болида или кометы) и на определенном от него расстоянии обеспечивается его поражение непрерывным лазерным лучом увеличенной мощности, излучаемой лазером 3. Последний жестко связан со следящей платформой 2 и лазерным дальномером 4. На первую и вторую группы входов следящей платформы 2 поступают азимутальные и угломестные координаты с первой и второй группы выходов блока вторичной обработки 1. Лазерный дальномер 4 определяет дальность до объекта, находящегося на более близком расстоянии, и получает разрешение на это с блока 1, имеющего выход, соединенный с входом этого дальномера, который выдает дальность в виде кода в блок сравнения кодов 7 и в блок управления излучением лазера 8. Одновременно код дальности выделенного объекта поступает на другую группу входов блока 7, с третьей группы выходов блока 1. При равенстве кодов фиксируется отождествление информации о дальности с лазерного дальномера 4 и с блока вторичной обработки 1, что свидетельствует о принадлежности этих кодов к одному и тому же объекту, и выдается сигнал в элемент совпадения 6, разрешающий прохождение сигнала от блока 8 на вход непрерывного лазера увеличенной мощности 3. Выдача этого сигнала может происходить при минимальном расстоянии от объекта. В результате лазер 3 начинает излучать световую энергию, поражающую объект, только при совмещении его луча с лучом лазерного дальномера 4 и нахождении аппарата на дальности, обеспечивающей поражение объекта, что способствует энергосбережению при излучении.
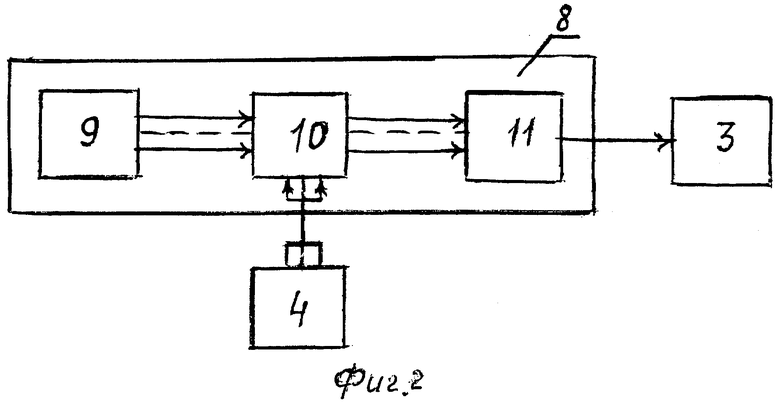
На фиг.2 показана блок-схема блока 8 и приняты следующие обозначения:
9 - датчик дальности, необходимый для поражения объекта
10 - вычитатель
11 - дешифратор.
Код дальности, характеризующий максимальное расстояние до объекта, при котором он может быть поражен, с группы выходов датчика 9 поступает на первую группу входов вычитателя 10, а на вторую его группу входов поступает текущий код дальности с группы выходов лазерного дальномера 4, который вычитается из кода с датчика 9. При положительной разности с группы выходов вычитателя 10 сработает дешифратор 11 и выдаст разрешение непрерывному лазеру увеличенной мощности 3 на излучение световой энергии в сторону кометы или болида.
Пример конкретного исполнения блока вторичной обработки представлен в книге В.П.Пестряков и др. «Радиотехнические системы», 1985 г., стр.219. Пример конкретного исполнения непрерывного лазера увеличенной мощности представлен в книге «Мир физики и техники» Ю.Айхлер, Г.И.Айхлер, М., 2012 г., стр.396, и в патенте №2270498 от 19 июля 2004 г., автор Часовской А.А. Таким образом при воздействии в течение необходимого времени непрерывного лазерного луча на определенный участок объекта обеспечивается его разрушение или изменение курса при достаточной мощности излучения.
Предлагаемое устройство может быть использовано для уменьшения последствий столкновения с Землей кометы, болида или другого небесного объекта. Его можно использовать и для исключения столкновения и с другими объектами в космосе и воздушном пространстве, что обеспечит безопасность полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2013 |
|
RU2515291C1 |
| ТРЕХКООРДИНАТНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2510889C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ БЕРЕГОВОГО НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505836C1 |
| АККУСТИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2013 |
|
RU2525472C1 |
| УСТРОЙСТВО ПОИСКА ОБЛАКОВ И МОЛНИЕВЫХ РАЗРЯДОВ | 2014 |
|
RU2568653C1 |
| ВЫСОТОМЕР | 2012 |
|
RU2501036C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2507528C1 |
| РАДИОЛОКАТОР | 2013 |
|
RU2533349C1 |
| ЗАГОРИЗОНТНЫЙ РАДИОЛОКАТОР | 2013 |
|
RU2515610C1 |
| ЛОКАЦИОННОЕ УСТРОЙСТВО | 1992 |
|
RU2032918C1 |
Изобретение может быть использовано в системе обнаружения комет и болидов. Достигаемый технический результат изобретения - возможность обеспечения поражения кометы или болида благодаря введению непрерывного лазера увеличенной мощности, блока сравнения кодов, блока управления излучением лазера и элемента совпадения, при этом выход и третья группа выходов блока вторичной обработки соответственно соединены с входом лазерного передатчика и с первой группой входов блока сравнения кодов, выход и вторая группа входов которого соответственно соединены с первым входом элемента совпадения и с группой выходов лазерного дальномера, соединенного также с группой входов блока управления излучением лазера, имеющего выход, соединенный с вторым входом элемента совпадения, выход которого соединен с входом непрерывного лазера увеличенной мощности, жестко связанного со следящей платформой. 2 ил.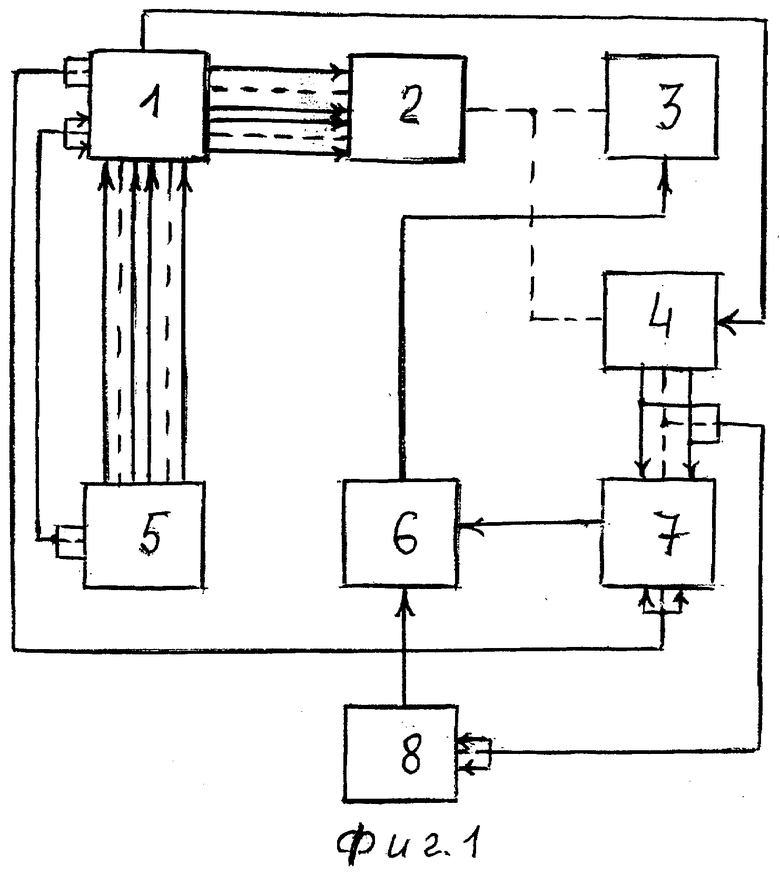
Оптико-локационное устройство, состоящее из датчика дальности и угловых координат, блока вторичной обработки, следящей платформы и лазерного дальномера, где первая, вторая и третья группы выходов датчика дальности и угловых координат соответственно соединены с первой, второй и третьей группами входов блока вторичной обработки, имеющего первую и вторую группы выходов, соответственно соединенные с первой и второй группами входов следящей платформы, жестко связанной с лазерным дальномером, отличающийся тем, что вводится непрерывный лазер увеличенной мощности, блок сравнения кодов, блок управления излучением лазера и элемент совпадения, при этом выход и третья группа выходов блока вторичной обработки соответственно соединены с входом лазерного дальномера и с первой группой входов блока сравнения кодов, выход и вторая группа входов блока сравнения кодов соответственно соединены с первым входом элемента совпадения и с группой выходов лазерного дальномера, соединенного также с группой входов блока управления излучением лазера, имеющего выход, соединенный с вторым входом элемента совпадения, выход которого соединен с входом непрерывного лазера увеличенной мощности, жестко связанного со следящей платформой.
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2288483C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2002 |
|
RU2247941C2 |
| ОДНОКАНАЛЬНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ СВЕТОВОЗВРАЩАЮЩИХ ОПТИЧЕСКИХ СИСТЕМ И ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО НИХ | 2008 |
|
RU2400770C1 |
| WO 2008071866 A1, 19.06.2008 | |||
| DE 3104318 A1, 26.08.1982 | |||
| JP 2002062109 A, 28.02.2002 | |||
| US 2012218546 A1, 30.08.2012 | |||

