Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для оценки аэродинамического коэффициента, а также к устройству для обнаружения отказа/повреждения управляющей поверхности с использованием устройства для оценки аэродинамического коэффициента. В частности, настоящее изобретение относится к устройству для оценки аэродинамического коэффициента, способному оценивать аэродинамические коэффициенты, показывающие аэродинамические характеристики летательного аппарата, и к устройству для обнаружения отказа/повреждения управляющей поверхности, способному обнаруживать отказавшие или поврежденные управляющие поверхности летательного аппарата с использованием оцениваемых аэродинамических коэффициентов.
Уровень техники
В отношении оценки аэродинамических коэффициентов, показывающих аэродинамические характеристики летательного аппарата, известно применение способа, включающего регистрацию показаний различных датчиков, имеющихся на летательном аппарате, в частности такой информации от датчиков, как угол атаки, угол бокового скольжения, воздушная скорость, угловая скорость, угол пространственного положения и угол отклонения управляющих поверхностей, и выполнение на основании полученной информации вычислений итерационным методом наименьших квадратов или методом нейронной сети. Также известен способ обнаружения отказа или повреждения управляющих поверхностей путем сравнения оцененных таким образом аэродинамических коэффициентов с аэродинамическими коэффициентами летательного аппарата в его нормальном состоянии.
Например, в выложенной до проведения экспертизы японской заявке на изобретение с номером публикации 2003-175896 [1] раскрыто устройство для обнаружения отказа/повреждения управляющей поверхности, оценивающее аэродинамические коэффициенты с использованием итерационного метода наименьших квадратов, по оцененным аэродинамическим коэффициентам вычисляющее окончательные аэродинамические коэффициенты с использованием метода нейронной сети и с помощью программных средств обнаруживающее отказы или подобные неисправности управляющих поверхностей на основании вычисленных окончательных аэродинамических коэффициентов.
Также возможен способ, предусматривающий оснащение летательного аппарата соответствующим оборудованием, например прокладку оптического волокна или электрического провода, для непосредственного обнаружения повреждений управляющих поверхностей.
Раскрытие изобретения
Техническая задача
Однако в случае, когда для оценки аэродинамических коэффициентов используется вышеупомянутый итерационный метод наименьших квадратов, для вычисления аэродинамических коэффициентов необходимо знать угловое ускорение. Для этого летательный аппарат нужно оснастить датчиком угловых ускорений. Добавлению же нового датчика сопутствует проблема увеличения веса планера летательного аппарата. Кроме того, оценивание аэродинамических коэффициентов с опорой только на один метод, такой как итерационный метод наименьших квадратов или метод нейронной сети, проблематично риском получения неточных оценочных значений аэродинамических коэффициентов. Так, при использовании аэродинамических коэффициентов, полученных итерационным методом наименьших квадратов или методом нейронной сети, для обнаружения отказа/повреждения управляющей поверхности, может произойти ошибочное обнаружение отказа/повреждения управляющей поверхности, и с этим связана та проблема, что результат обнаружения невозможно с легкостью отразить в законе управления полетом. Кроме того, проблема способа, предполагающего прокладку по планеру летательного аппарата оптического волокна или подобного оборудования, заключается в том, что хотя такой способ и позволяет распознать повреждение управляющей поверхности, обнаружение отказа управляющей поверхности невозможно.
Настоящее изобретение было создано для решения описанных выше проблем, и его целью является разработка устройства для оценки аэродинамического коэффициента, способного вычислять достоверные оценочные значения аэродинамических коэффициентов, а также разработка устройства для обнаружения отказа/повреждения управляющей поверхности, способного точно обнаружить, или распознать, отказ/повреждение управляющей поверхности путем вычисления достоверных оценочных значений аэродинамических коэффициентов при одновременном уменьшении дискомфорта для пассажиров.
Решение задачи
Решение поставленной задачи достигается в настоящем изобретении следующим образом.
Объектом настоящего изобретения является устройство для оценки аэродинамического коэффициента, содержащее: средство выработки командных сигналов угла отклонения, вырабатывающее командный сигнал угла отклонения управляющей поверхности для оценки аэродинамического коэффициента, показывающего аэродинамическую характеристику планера (корпуса) летательного аппарата; средство регистрации параметра движения (кинетического состояния), регистрирующее параметр движения планера летательного аппарата, полученный в результате перемещения предусмотренной на планере летательного аппарата управляющей поверхности на основании командного сигнала угла отклонения; средство вычисления предварительных значений, вычисляющее предварительные значения, предназначенные для оценки аэродинамического коэффициента, по параметру движения с использованием двух или более различных методов оценки; и средство определения оценочного значения аэродинамического коэффициента, определяющее на основании предварительных значений оценочное значение аэродинамического коэффициента.
В предлагаемом в изобретении устройстве для оценки аэродинамического коэффициента средство выработки командных сигналов угла отклонения вырабатывает командный сигнал угла отклонения, вызывающий перемещение управляющих поверхностей, чтобы сообщить планеру летательного аппарата определенное движение с целью оценки аэродинамического коэффициента, причем управляющие поверхности перемещаются в соответствии с командным сигналом угла их отклонения. Затем средство регистрации параметра движения регистрирует параметры движения, такие как угол атаки, угол бокового скольжения, воздушная скорость, угловая скорость, угол пространственного положения и угол поворота планера летательного аппарата, получившего движение в результате перемещения управляющих поверхностей, получаемые от датчика или иного воспринимающего средства, предварительно установленного по планеру летательного аппарата. Средство вычисления предварительных значений вычисляет предварительные значения, которые служат значениями-кандидатами для вычисления оценочного значения аэродинамического коэффициента, на основании параметров движения с использованием двух или более различных методов оценки, например двух или более различных методов оценки, выбираемых из расширенного фильтра Калмана, ансцентного (unscented) фильтра Калмана, метода регрессии с помощью преобразования Фурье, метода нейронной сети, фильтра частиц и других методов. В конце средство определения оценочного значения аэродинамического коэффициента определяет оценочное значение аэродинамического коэффициента путем выбора из этих предварительных значений или вычисления по ним, т.е. на их основе, значения, наиболее подходящего для оценочного значения аэродинамического коэффициента. Таким образом, для получения оценочного значения аэродинамического коэффициента сначала двумя или более различными методами оценки вычисляют предварительные значения, а затем по предварительным значениям окончательно определяют оценочное значение аэродинамического коэффициента. Это позволяет внести избыточность в вычисление оценочного значения аэродинамического коэффициента и таким образом позволяет вычислять аэродинамический коэффициент с высокой достоверностью.
В первом варианте выполнения предлагаемого в изобретении устройства для оценки аэродинамического коэффициента средство определения оценочного значения аэродинамического коэффициента определяет в качестве оценочного значения аэродинамического коэффициента среднее или медиану предварительных значений.
Поскольку в первом варианте выполнения предлагаемого в изобретении устройства для оценки аэродинамического коэффициента в качестве оценочного значения аэродинамического коэффициента определяют среднее или медиану предварительных значений, вычисленных различными методами оценивания, это позволяет внести избыточность в вычисление оценочного значения аэродинамического коэффициента и таким образом позволяет вычислять аэродинамический коэффициент с высокой достоверностью.
Во втором варианте выполнения предлагаемого в изобретении устройства для оценки аэродинамического коэффициента средство определения оценочного значения аэродинамического коэффициента определяет в качестве оценочного значения аэродинамического коэффициента предварительное значение, соответствующее одному из воспроизведенных значений параметра движения, вычисленных на основании соответствующих предварительных значений, являющемуся ближайшим к параметру движения.
Таким образом, во втором варианте выполнения предлагаемого в изобретении устройства для оценки аэродинамического коэффициента воспроизведенное значение параметра движения может вычисляться с использованием каждого предварительного значения. Поэтому воспроизведенные значения параметра движения, полученные из соответствующих предварительных значений, сравнивают с фактическим параметром движения, зарегистрированным средством регистрации параметра движения, и в качестве оценочного значения аэродинамического коэффициента определяют предварительное значение, соответствующее воспроизведенному значению, ближайшему к фактическому параметру движения. Это позволяет внести избыточность в вычисление оценочного значения аэродинамического коэффициента и таким образом позволяет вычислять аэродинамический коэффициент с высокой достоверностью.
Кроме того, объектом изобретения является устройство для обнаружения отказа/повреждения управляющей поверхности, которое содержит средство оценки возможности отказа/повреждения, делающее вывод о возможности отказа/повреждения управляющей поверхности, и средство обнаружения отказа/повреждения управляющей поверхности, которое выявляет отказавшую или поврежденную управляющую поверхность на основании оценочного значения аэродинамического коэффициента, полученного устройством для оценки аэродинамического коэффициента, если средством оценки возможности отказа/повреждения сделан вывод о возможности отказа/повреждения какой-либо управляющей поверхности.
Если в предлагаемом в изобретении устройстве для обнаружения отказа/повреждения управляющей поверхности сделан вывод о возможности отказа/повреждения управляющей поверхности, то вычисляется оценочное значение аэродинамического коэффициента и на основании этого оценочного значения определяется отказавшая или поврежденная управляющая поверхность, т.е. определяется, какая именно управляющая поверхность отказала или повреждена. Таким образом, изобретение обеспечивает точное выявление отказа или повреждения управляющей поверхности за счет непрерывного отслеживания возможного отказа/повреждения управляющих поверхностей, при этом сводя к минимуму нежелательные движения летательного аппарата, такие как нежелательное покачивание планера летательного аппарата, и тем самым уменьшая дискомфорт для пассажиров.
В предлагаемом устройстве для обнаружения отказа/повреждения управляющей поверхности в его первом варианте средство оценки возможности отказа/повреждения содержит другой блок выработки командных сигналов угла отклонения, вырабатывающий командный сигнал угла отклонения для перемещения управляющей поверхности таким образом, чтобы не сообщать движение планеру летательного аппарата, и другое средство регистрации параметра движения, регистрирующее параметр движения планера летательного аппарата, полученный в результате перемещения предусмотренной на планере летательного аппарата управляющей поверхности на основании командного сигнала угла отклонения, причем вывод о возможности отказа/повреждения управляющей поверхности делается на основании параметра движения.
В первом варианте выполнения предлагаемого в изобретении устройства для обнаружения отказа/повреждения управляющей поверхности, для того чтобы судить о возможности отказа/повреждения управляющей поверхности, другой (дополнительный) блок выработки командных сигналов угла отклонения вырабатывает командный сигнал угла отклонения для управления положением управляющих поверхностей с использованием комбинации углов отклонения, которая не сообщает планеру летательного аппарата какого-либо движения. Другое (дополнительное) средство регистрации параметра движения регистрирует параметр движения планера летательного аппарата, полученный в результате перемещения управляющих поверхностей в соответствии с командным сигналом угла отклонения, выработанным для оценки возможности отказа/повреждения управляющей поверхности. При этом если по полученному параметру движения можно констатировать, что планер летательного аппарата совершает движение, когда в нормальном состоянии он не должен этого делать, средство оценки возможности отказа/повреждения делает, на основании параметра движения, вывод о возможности отказа/повреждения управляющей поверхности. Как указано выше, в случае невозможности, т.е. маловероятности, отказа/повреждения управляющей поверхности планер летательного аппарата не совершает движение. Таким образом, изобретение обеспечивает точное выявление отказа или повреждения управляющей поверхности за счет непрерывного или периодического отслеживания возможного отказа/повреждения управляющей поверхности, при этом сводя к минимуму нежелательные движения планера летательного аппарата, например его нежелательное покачивание, и тем самым уменьшая дискомфорт для пассажиров.
Во втором варианте выполнения предлагаемого в изобретении устройства для обнаружения отказа/повреждения управляющей поверхности средство оценки возможности отказа/повреждения содержит еще одно (дополнительное) средство выработки командных сигналов угла отклонения, вырабатывающее командный сигнал угла отклонения управляющей поверхности для изменения пространственного положения планера летательного аппарата на требуемое или сохранения требуемого пространственного положения планера летательного аппарата, еще одно (дополнительное) средство регистрации параметра движения, регистрирующее параметр движения планера летательного аппарата во время полета на основании командного сигнала угла отклонения, и средство расчета параметра движения, вычисляющее расчетное значение параметра движения, представляющее параметр движения, рассчитанный (спрогнозированный) при допущении, что планер летательного аппарата находится в нормальном состоянии, причем вывод о возможности отказа/повреждения управляющей поверхности делается на основании зарегистрированного параметра движения и расчетного значения параметра движения.
Во втором варианте выполнения предлагаемого в изобретении устройства для обнаружения отказа/повреждения управляющей поверхности вывод о возможности отказа/повреждения управляющей поверхности делается на основании фактического параметра движения, зарегистрированного во время полета, и расчетного значения параметра движения, рассчитанного при допущении, что планер летательного аппарата находится в нормальном состоянии. Таким образом, изобретение обеспечивает точное выявление отказа или повреждения управляющей поверхности за счет непрерывного отслеживания возможного отказа/повреждения управляющей поверхности, при этом сводя к минимуму нежелательные движения планера летательного аппарата, например его нежелательное покачивание, и тем самым уменьшая дискомфорт для пассажиров.
В третьем варианте своего выполнения предлагаемое в изобретении устройство для обнаружения отказа/повреждения управляющей поверхности содержит оптическое волокно или электрический провод, проложенное(ый) по планеру летательного аппарата, и средство контроля состояния, обнаруживающее ненормальное состояние оптического волокна или электрического провода, причем средство оценки возможности отказа/повреждения содержит: еще одно (дополнительное) средство выработки командных сигналов угла отклонения, вырабатывающее командный сигнал угла отклонения управляющей поверхности для изменения пространственного положения планера летательного аппарата на требуемое или сохранения требуемого пространственного положения планера летательного аппарата; средство регистрации угла отклонения управляющей поверхности, регистрирующее угол отклонения управляющих поверхностей, получаемый в результате их перемещения на основании командного сигнала угла отклонения управляющей поверхности; и средство расчета угла отклонения, вычисляющее расчетное значение угла отклонения, представляющее угол отклонения управляющей поверхности, рассчитанный на основании командного сигнала угла отклонения при допущении, что планер летательного аппарата находится в нормальном состоянии, причем вывод о возможности повреждения управляющей поверхности делается на основании результата обнаружения на выходе средства контроля состояния оптического волокна или электрического провода, а вывод о возможности отказа управляющей поверхности делается на основании угла отклонения и расчетного значения угла отклонения.
В третьем варианте выполнения предлагаемого в изобретении устройства для обнаружения отказа/повреждения управляющей поверхности вывод о возможности повреждения управляющей поверхности делается на основании результата обнаружения ненормального состояния, полученного от оптического волокна или электрического провода, а вывод о возможности отказа управляющей поверхности делается на основании фактического угла отклонения управляющей поверхности во время полета и расчетного значения угла отклонения, рассчитанного при допущении, что планер летательного аппарата находится в нормальном состоянии. Таким образом, изобретение обеспечивает точное выявление отказа или повреждения управляющей поверхности за счет непрерывного отслеживания возможного отказа/повреждения управляющей поверхности, при этом сводя к минимуму нежелательные движения планера летательного аппарата, например его нежелательное покачивание, и тем самым уменьшая дискомфорт для пассажиров.
В четвертом варианте выполнения предлагаемого в изобретении устройства для обнаружения отказа/повреждения управляющей поверхности средство обнаружения отказа/повреждения управляющей поверхности выявляет отказ/повреждение управляющей поверхности путем сравнения оценочного значения аэродинамического коэффициента либо с оценочным значением аэродинамического коэффициента планера летательного аппарата в нормальном состоянии, либо с оценочным значением аэродинамического коэффициента, полученным при предыдущем обнаружении отказа/повреждения управляющей поверхности.
Четвертый вариант выполнения предлагаемого в изобретении устройства для обнаружения отказа/повреждения управляющей поверхности предусматривает осуществляемое предварительно и последовательно сохранение в памяти оценочного значения аэродинамического коэффициента планера летательного аппарата в нормальном состоянии и ранее вычисленного значения аэродинамического коэффициента, а также использование этих значений для их сравнения при обнаружении отказа/повреждения управляющей поверхности. Это позволяет точно обнаруживать отказ или повреждение управляющей поверхности в случае постепенного развития (усугубления) такого отказа или повреждения.
Преимущества изобретения
Как было указано выше, изобретение обеспечивает возможность вычисления достоверных оценочных значений аэродинамических коэффициентов с одновременным уменьшением дискомфорта для пассажиров летательного аппарата, а использование вычисляемых оценочных значений аэродинамических коэффициентов обеспечивает точное обнаружение отказа/повреждения управляющей поверхности.
Краткое описание чертежей
На фиг.1 приведена структурная схема, схематически изображающая конфигурацию устройства для оценки аэродинамического коэффициента, которое является первым объектом настоящего изобретения.
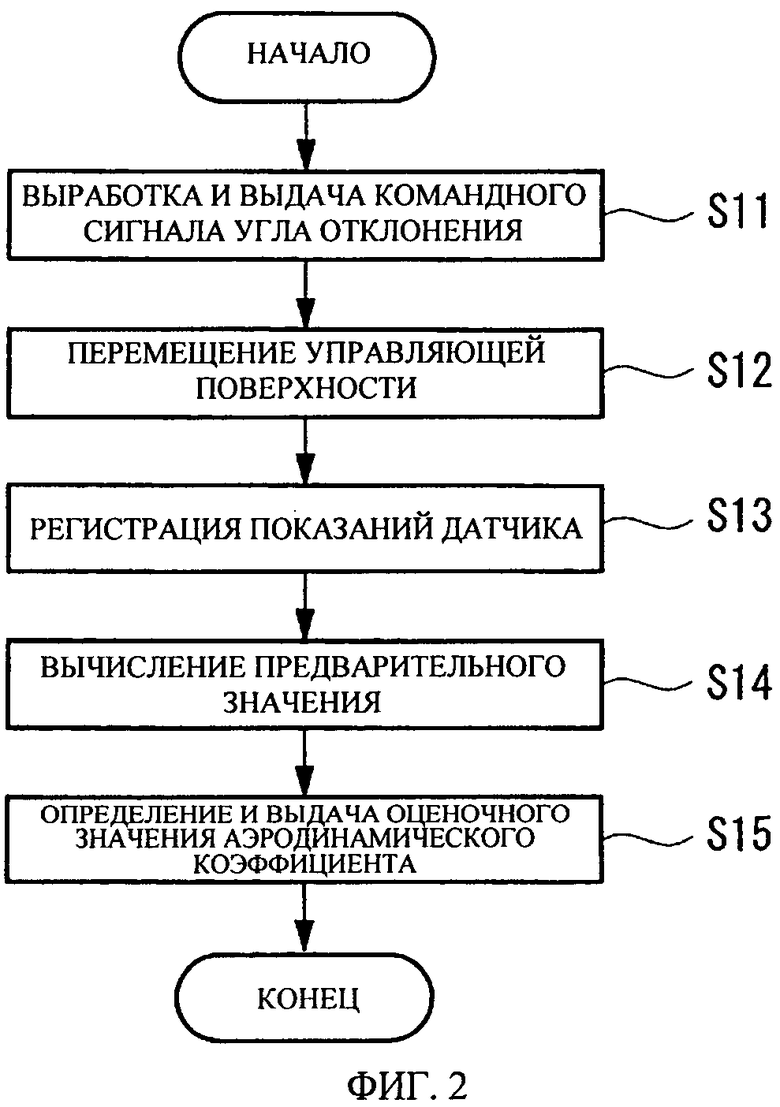
На фиг.2 приведена блок-схема, иллюстрирующая процесс оценки аэродинамических коэффициентов устройством для оценки аэродинамического коэффициента, которое является первым объектом настоящего изобретения.
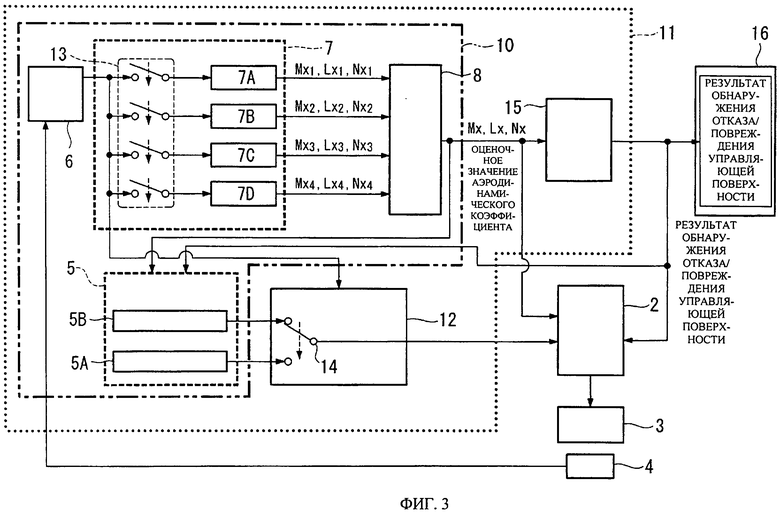
На фиг.3 приведена структурная схема, схематически изображающая конфигурацию устройства для обнаружения отказа/повреждения управляющей поверхности, которое является вторым объектом настоящего изобретения.
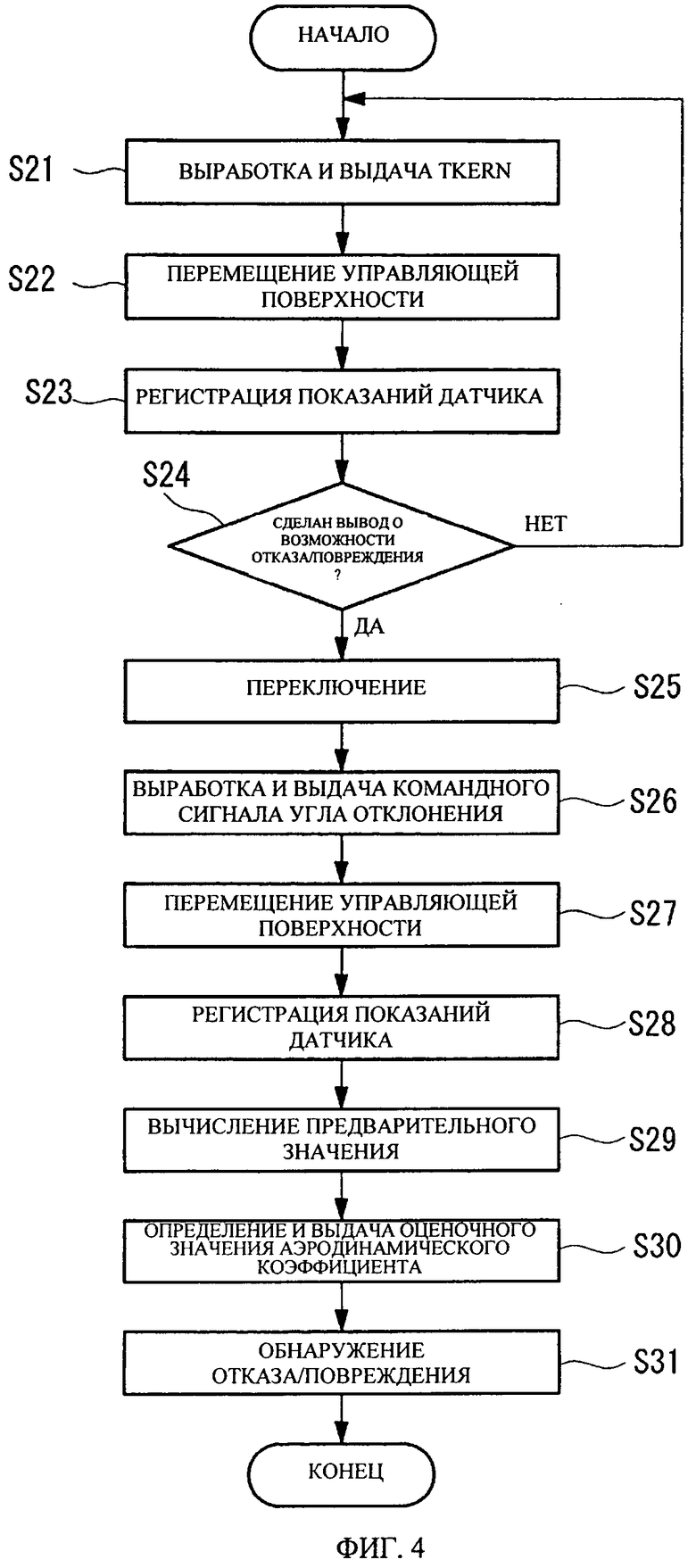
На фиг.4 приведена блок-схема, иллюстрирующая процесс оценки возможности отказа/повреждения управляющей поверхности, выполняемый устройством для обнаружения отказа/повреждения управляющей поверхности являющимся вторым объектом настоящего изобретения.
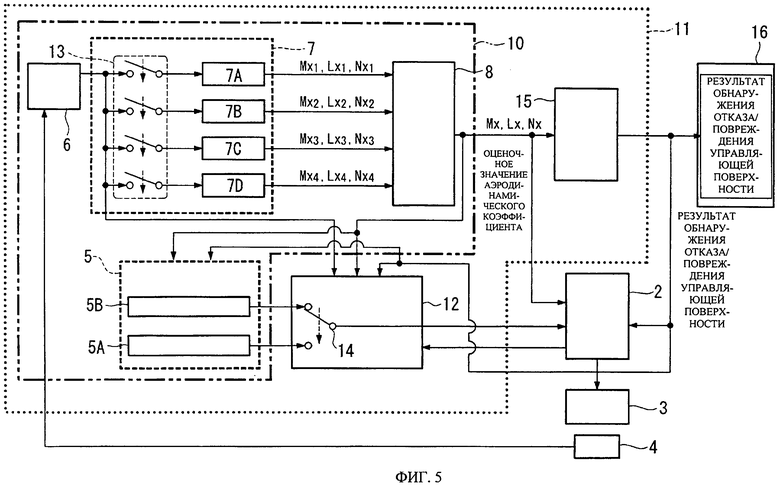
На фиг.5 приведена структурная схема, схематически изображающая конфигурацию устройства для обнаружения отказа/повреждения управляющей поверхности в другом варианте его выполнения.
На фиг.6 приведена структурная схема, схематически изображающая конфигурацию устройства для обнаружения отказа/повреждения управляющей поверхности в характерном примере осуществления настоящего изобретения.
Осуществление изобретения
Первый объект изобретения
Ниже со ссылкой на чертежи рассматривается устройство для оценки аэродинамического коэффициента, представляющее собой первый объект настоящего изобретения.
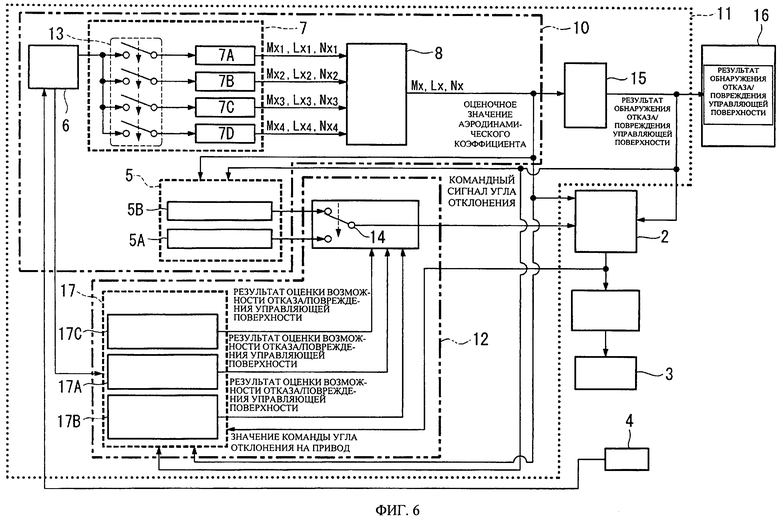
На фиг.1 приведена структурная схема, схематически изображающая конфигурацию предлагаемого в изобретении устройства для оценки аэродинамического коэффициента. Устройством 1 для оценки аэродинамического коэффициента является устройство, оценивающее аэродинамические коэффициенты, показывающие аэродинамические характеристики летательного аппарата, причем устройство 1 находится на летательном аппарате, как это показано на фиг.1, и связано с системой 2 управления полетом, управляющей планером летательного аппарата, положением управляющих поверхностей 3, создающих аэродинамические силы для управления пространственным положением планера летательного аппарата, и с датчиком 4, воспринимающим параметры движения (кинетического состояния) планера летательного аппарата.
Система 2 управления полетом осуществляет общее управление летательным аппаратом, настраивает закон управления полетом в соответствии с состоянием планера летательного аппарата или режимом полета и перестраивает закон управления полетом на основании оценочных значений аэродинамических коэффициентов, оцениваемых устройством 1 для оценки аэродинамического коэффициента. В этом случае система 2 управления полетом выдает управляющий сигнал в различное оборудование (на чертежах не показано), предусмотренное на летательном аппарате, в соответствии с законом управления полетом.
Управляющие поверхности 3 включают в себя руль высоты, обеспечивающий управление по тангажу, т.е. подъем или опускание носа летательного аппарата, руль направления, обеспечивающий управление по рысканию, т.е. поворот носа летательного аппарата влево или вправо, элерон, обеспечивающий поперечное управление, т.е. крен планера летательного аппарата влево или вправо, и взлетно-посадочную механизацию крыла (закрылок, предкрылок), изменяющую профиль основного крыла таким образом, чтобы увеличить подъемную силу. Управляющие поверхности 3 перемещаются приводами не показанной на чертежах исполнительной системы в соответствии с командным сигналом угла отклонения, описываемым ниже, посредством системы управления полетом. Посредством аэродинамических сил, создаваемых в результате перемещения управляющих поверхностей 3, осуществляется управление пространственным положением планера летательного аппарата.
Под датчиком 4 понимаются различные датчики, такие как датчик воздушных сигналов, инерциальный датчик и датчик угла отклонения. Датчик 4 воспринимает информацию, относящуюся к различным параметрам движения планера летательного аппарата, таким как угол атаки, угол бокового скольжения, воздушная скорость, угловая скорость, угол пространственного положения и угол отклонения поверхностей планера летательного аппарата, и выдает свои показания, т.е. полученную им информацию, в блок 6 регистрации показаний датчиков.
Устройство 1 для оценки аэродинамического коэффициента содержит блок 5 выработки командных сигналов угла отклонения (средство выработки командных сигналов угла отклонения), блок 6 регистрации показаний датчиков (средство регистрации параметра движения), блок 7 вычисления предварительных значений (средство вычисления предварительных значений) и блок 8 определения оценочных значений аэродинамических коэффициентов (средство определения оценочного значения аэродинамического коэффициента).
Блок 5 выработки командных сигналов угла отклонения вырабатывает командный сигнал угла отклонения, вызывающий перемещение управляющих поверхностей 3 для того, чтобы сообщить планеру летательного аппарата определенное движение с целью оценки аэродинамических коэффициентов, и выдает выработанный командный сигнал угла отклонения в систему 2 управления полетом для перемещения управляющих поверхностей 3 в соответствии с командным сигналом угла отклонения. Кроме того, во время полета летательного аппарата система 2 управления полетом вырабатывает командный сигнал угла отклонения для изменения пространственного положения планера летательного аппарата на требуемое или сохранения требуемого пространственного положения планера летательного аппарата, накладывает командный сигнал угла отклонения, выработанный блоком 5 выработки командных сигналов угла отклонения, на этот командный сигнал угла отклонения и выдает полученный в результате этого наложения (результирующий) сигнал приводам не показанной на чертежах исполнительной системы.
Блок 6 регистрации показаний датчиков осуществляет с помощью датчика 4 сбор информации, относящейся к параметрам движения планера летательного аппарата, полученным в результате перемещения управляющей поверхности 3 в соответствии с командным сигналом угла отклонения, и выдает полученные параметры движения в блок 7 вычисления предварительных значений, описываемый ниже.
Блок 7 вычисления предварительных значений содержит вычислительное устройство 7А, в котором хранится алгоритм на основе расширенного фильтра Калмана, вычислительное устройство 7В, в котором хранится алгоритм на основе ансцентного фильтра Калмана, вычислительное устройство 1C, в котором хранится алгоритм на основе метода регрессии с помощью преобразования Фурье, и вычислительное устройство 7D, в котором хранится алгоритм на основе метода нейронной сети, причем вычислительные устройства 7A-7D организованы таким образом, чтобы каждое из них индивидуально, т.е. отдельно от других вычислительных устройств, по показаниям датчиков вычисляло на основании заложенного в нем соответствующего алгоритма предварительные значения для оценки аэродинамических коэффициентов. Блок 7 вычисления предварительных значений выдает предварительные значения, вычисленные вычислительными устройствами 7A-7D, в блок 8 определения оценочных значений аэродинамических коэффициентов. В рассматриваемом случае блок 7 вычисления предварительных значений может иметь конфигурацию, в которой все вычислительные устройства 7A-7D используются для вычисления предварительных значений по отдельности, или может иметь конфигурацию, в которой для вычисления предварительных значений по отдельности используются два или три из вычислительных устройств 7A-7D. Кроме того, вычисление предварительных значений вычислительными устройствами 7A-7D не ограничивается использованием алгоритмов, относящихся к описанным выше четырем методам оценивания, так что использоваться могут и алгоритмы, связанные с другими методами оценивания, такие как фильтр частиц (particle filter).
Следует заметить, что конкретные операционные выражения и т.п., основанные на оценках, предназначенных для вычисления предварительных значений вычислительными устройствами 7А-7С, уже были опубликованы автором настоящего изобретения, например на симпозиуме, проводившемся Японским обществом по аэронавтике и космонавтике (ссылочный номер: JSASS-2009-5057) и являются известными, так что их дальнейшее описание в настоящем описании не приводится.
Блок 8 определения оценочных значений аэродинамических коэффициентов определяет оценочное значение аэродинамического коэффициента по нескольким предварительным значениям, вычисленным в блоке 7 вычисления предварительных значений. В частности, при этом вычисляется среднее или медиана предварительных значений, и вычисленное(ая) среднее или медиана в завершение может быть определено(а) в качестве оценочного значения аэродинамического коэффициента. Кроме того, с использованием соответствующих предварительных значений можно вычислять воспроизведенные значения показаний датчика, каждое из которых соответствует одному из предварительных значений, и сравнивать воспроизведенные значения с показаниями датчика, тем самым определяя в качестве оценочного значения аэродинамического коэффициента предварительное значение, соответствующее тому воспроизведенному значению, которое совпадает с показаниями датчика или является ближайшим к ним. Определенное оценочное значение аэродинамического коэффициента выдается в систему 2 управления полетом.
Ниже со ссылкой на блок-схему, приведенную на фиг.2, описывается процесс вычисления оценочных значений аэродинамических коэффициентов устройством 1 для оценки аэродинамического коэффициента, имеющим описанную выше конфигурацию.
Как показано на фиг.2, на шаге S11 блок 5 выработки командных сигналов угла отклонения вырабатывает командный сигнал угла отклонения, вызывающий перемещение управляющих поверхностей 3 таким образом, чтобы сообщить планеру летательного аппарата определенное движение с целью оценки аэродинамических коэффициентов, и выдает выработанный командный сигнал угла отклонения в систему 2 управления полетом. Затем процесс переходит к следующему шагу S12. На шаге S12 система 2 управления полетом вырабатывает командный сигнал угла отклонения для изменения пространственного положения планера летательного аппарата на требуемое или сохранения требуемого пространственного положения планера летательного аппарата, накладывает командный сигнал угла отклонения, выработанный блоком 5 выработки командных сигналов угла отклонения, на этот командный сигнал угла отклонения и выдает полученный в результате этого наложения сигнал угла отклонения приводам не показанной на чертежах исполнительной системы, которые перемещают управляющие поверхности 3 в соответствии с командным сигналом угла отклонения.
На шаге S13, поскольку управляющие поверхности 3 на предыдущем шаге S12 переместились, сообщив таким образом планеру летательного аппарата движение, например движение покачивания, в соответствии с командным сигналом угла отклонения, параметры движения планера летательного аппарата, непрерывно или периодически воспринимаемые датчиком 4, изменяются. Датчик 4 фиксирует изменившиеся параметры движения и выдает полученную им информацию в блок 6 регистрации показаний датчиков.
На шаге S14 вычислительные устройства 7A-7D, входящие в состав блока 7 вычисления предварительных значений, отдельно друг от друга вычисляют предварительные значения, и результаты этого вычисления выдаются в блок 8 определения оценочных значений аэродинамических коэффициентов. На следующем шаге S15 блок 8 определения оценочных значений аэродинамических коэффициентов определяет окончательные оценочные значения аэродинамических коэффициентов на основании предварительных значений, полученных от блока 7 вычисления предварительных значений, и выдает определенные оценочные значения аэродинамических коэффициентов в систему 2 управления полетом. На этом последовательность действий предлагаемого в изобретении устройства для определения аэродинамических коэффициентов завершается. Реагируя на поступление оценочных значений аэродинамических коэффициентов, система 2 управления полетом может перестроить закон управления полетом.
Таким образом, посредством вычислительных устройств 7A-7D на основании двух или более различных методов оценивания вычисляют предварительные значения для оценивания аэродинамических коэффициентов, а затем по этим предварительным значениям определяют окончательные оценочные значения аэродинамических коэффициентов. Это позволяет внести избыточность в вычисление оценочных значений аэродинамических коэффициентов и поэтому позволяет вычислять достоверные аэродинамические коэффициенты. Кроме того, поскольку показания датчика, т.е. воспринимаемая датчиком информация, необходимая при вычислении предварительных значений с помощью расширенного фильтра Калмана, ансцентного фильтра Калмана, метода регрессии с помощью преобразования Фурье и метода нейронной сети, реализуемых в вычислительных устройствах 7A-7D, не включает в себя угловое ускорение планера летательного аппарата, то планер летательного аппарата не нужно оснащать датчиком угловых ускорений, что позволяет избежать увеличения веса планера летательного аппарата.
Второй объект изобретения
Ниже со ссылкой на чертежи рассматривается устройство для обнаружения отказа/повреждения управляющей поверхности, представляющее собой второй объект настоящего изобретения.
На фиг.3 приведена структурная схема, схематически изображающая конфигурацию устройства для обнаружения отказа/повреждения управляющей поверхности как второго объекта изобретения. Устройство 11 для обнаружения отказа/повреждения управляющей поверхности представляет собой устройство, способное обнаруживать, или выявлять, отказ управляющей поверхности 3, например ситуацию, в которой управляющая поверхность уже не реагирует на значение командного сигнала угла отклонения управляющей поверхности или уже не может перемещаться (заблокирована), либо повреждение управляющей поверхности, например ситуацию, в которой управляющая поверхность частично или полностью разрушилась. С этой целью устройство 11 для обнаружения отказа/повреждения управляющей поверхности содержит, как показано на фиг.3, блок 12 оценки возможности отказа/повреждения управляющей поверхности и блок 15 обнаружения отказа/повреждения управляющей поверхности, а также устройство 10 для оценки аэродинамических коэффициентов. Кроме того, устройство 11 для обнаружения отказа/повреждения управляющей поверхности находится на летательном аппарате и связано с системой 2 управления полетом, управляющей планером летательного аппарата, с датчиком 4, воспринимающим параметры движения планера летательного аппарата, и с устройством 16 индикации, предусмотренным в кабине экипажа или в ином месте летательного аппарата.
Устройство 10 для оценки аэродинамических коэффициентов, включенное в состав устройства 11 для обнаружения отказа/повреждения управляющей поверхности, имеет ту же конфигурацию, что и устройство 1 для оценки аэродинамического коэффициента, описанное выше в качестве первого объекта изобретения, но отличается от устройства 1 для оценки аэродинамического коэффициента тем, что оно выполнено для применения в устройстве 11 для обнаружения отказа/повреждения управляющей поверхности. В приведенном ниже описании конфигурация устройства 11 в части, совпадающей с конфигурацией устройства 1 для оценки аэродинамических коэффициентов, не рассматривается, а описываются лишь отличия.
В частности, для оценки аэродинамического коэффициента блок 5 выработки командных сигналов угла отклонения вырабатывает командный сигнал угла отклонения управляющей поверхности, в соответствии с которым управляющие поверхности 3 перемещаются, сообщая планеру летательного аппарата движение, с целью оценки аэродинамических коэффициентов, а также вырабатывает, либо на основании аэродинамических коэффициентов, заранее сохраненных в памяти для нормального полета, либо на основании оценочных значений аэродинамических коэффициентов, полученных при предыдущем обнаружении отказа/повреждения управляющей поверхности, командный сигнал (Tkern) угла отклонения, предназначенный для проверки в отношении возможности отказа/повреждения управляющей поверхности, с целью перемещения управляющих поверхностей с использованием комбинации углов отклонения, не сообщающей планеру летательного аппарата какого-либо движения, чтобы сделать вывод о возможности отказа/повреждения управляющей поверхности. Для этого блок 5 выработки командных сигналов угла отклонения содержит управляющее устройство 5А для оценки аэродинамических коэффициентов, вырабатывающее командный сигнал угла отклонения управляющей поверхности для оценки аэродинамического коэффициента, и управляющее устройство 5В для проверки возможности отказа/повреждения управляющей поверхности, вырабатывающее командный сигнал угла отклонения, предназначенный для проверки в отношении возможности отказа/повреждения управляющей поверхности. Кроме того, система 2 управления полетом вырабатывает командный сигнал угла отклонения для изменения пространственного положения планера летательного аппарата на требуемое или сохранения требуемого пространственного положения планера летательного аппарата во время полета, накладывает командный сигнал угла отклонения, выработанный блоком 5 выработки командных сигналов угла отклонения, на этот командный сигнал угла отклонения, и выдает полученный в результате этого наложения командный сигнал угла отклонения приводам исполнительной системы.
Для вычисления оценочных значений аэродинамических коэффициентов, если блок 12 оценки возможности отказа/повреждения управляющей поверхности, описываемый ниже, сделал вывод о возможности отказа/повреждения управляющей поверхности, устройство 10 для оценки аэродинамических коэффициентов содержит переключатель 13, предусмотренный в блоке 7 вычисления предварительных значений, чтобы показания датчика поступали на вход только в том случае, если блок 12 оценки возможности отказа/повреждения управляющей поверхности сделал вывод о возможности отказа/повреждения управляющей поверхности.
Блок 12 оценки возможности отказа/повреждения управляющей поверхности связан с блоком 6 регистрации показаний датчиков, с блоком 5 выработки командных сигналов угла отклонения и с системой 2 управления полетом и может обмениваться разного рода информацией с блоком 6 регистрации показаний датчиков, блоком 5 выработки командных сигналов угла отклонения и системой 2 управления полетом. Блок 12 оценки возможности отказа/повреждения управляющей поверхности также содержит переключатель 14, расположенный на стыке с блоком 5 выработки командных сигналов угла отклонения, и этот переключатель выполняет переключение таким образом, чтобы блок 12 оценки возможности отказа/повреждения управляющей поверхности, оценивая возможность отказа/повреждения управляющей поверхности, мог принимать из управляющего устройства 5В для проверки возможности отказа/повреждения управляющей поверхности командный сигнал угла отклонения управляющей поверхности, а также мог принимать из управляющего устройства 5А для оценки аэродинамических коэффициентов командный сигнал угла отклонения управляющей поверхности, если сделан вывод о возможности отказа/повреждения управляющей поверхности.
Для суждения о возможности отказа/повреждения управляющей поверхности блок 12 оценки возможности отказа/повреждения управляющей поверхности принимает на входе командный сигнал угла отклонения, предназначенный для проверки в отношении возможности отказа/повреждения управляющей поверхности и поступивший из управляющего устройства 5В для проверки возможности отказа/повреждения управляющей поверхности, и выдает этот командный сигнал угла отклонения, предназначенный для проверки в отношении возможности отказа/повреждения управляющей поверхности, в систему 2 управления полетом. Блок 12 оценки возможности отказа/повреждения управляющей поверхности принимает показания датчика, полученные в результате перемещения управляющих поверхностей 3 в соответствии с этим командным сигналом угла отклонения, предназначенным для проверки в отношении возможности отказа/повреждения управляющей поверхности, из блока 6 регистрации показаний датчиков, и судит о том, существует ли возможность того, что какая-либо из управляющих поверхностей 3 отказала или повреждена, например, путем сравнения зарегистрированных показаний датчика с заданным порогом. Если сделан вывод о возможности отказа/повреждения какой-либо управляющей поверхности, блок 12 оценки возможности отказа/повреждения управляющей поверхности принимает на входе командный сигнал угла отклонения, предназначенный для оценки аэродинамических коэффициентов, из управляющего устройства 5А для оценки аэродинамических коэффициентов, и выдает этот командный сигнал угла отклонения, предназначенный для оценки аэродинамических коэффициентов, в систему 2 управления полетом.
Следует заметить, что работа переключателя 13 и работа переключателя 14 взаимосвязаны, и когда переключатель 14 соединяет блок 12 оценки возможности отказа/повреждения управляющей поверхности с управляющим устройством 5В для проверки возможности отказа/повреждения управляющей поверхности, переключатель 13 разомкнут, в результате чего показания датчика не поступают на входы вычислительных устройств 7A-7D. Когда переключатель 14 соединяет блок 12 оценки возможности отказа/повреждения управляющей поверхности с управляющим устройством 5А для оценки аэродинамических коэффициентов, переключатель 13 замкнут, в результате чего показания датчика поступают на входы вычислительных устройств 7A-7D.
Если сделан вывод о возможности отказа/повреждения какой-либо из управляющих поверхностей 3, блок 15 обнаружения отказа/повреждения управляющей поверхности принимает на входе оценочные значения аэродинамических коэффициентов, вычисленные устройством 10 для оценки аэродинамических коэффициентов, и на основании оценочных значений аэродинамических коэффициентов определяет, какая именно управляющая поверхность отказала или повреждена. Например, для выявления отказа/повреждения управляющей поверхности блок 15 обнаружения отказа/повреждения управляющей поверхности заранее сохраняет в памяти аэродинамические коэффициенты, получаемые во время нормального полета летательного аппарата, и сравнивает эти аэродинамические коэффициенты с аэродинамическими коэффициентами, выдаваемыми устройством 10 для оценки аэродинамических коэффициентов. Соответственно, на основании результата такого сравнения можно определить, какая именно управляющая поверхность отказала или повреждена. Кроме того, в случае, например, постепенного развития отказа или повреждения управляющей поверхности, оценочные значения аэродинамических коэффициентов можно сравнивать с оценочными значениями аэродинамических коэффициентов, полученными при предыдущем обнаружении отказа/повреждения управляющей поверхности, и выявлять отказ или повреждение управляющей поверхности на основании результата этого сравнения. Результат обнаружения отказавшей/поврежденной управляющей поверхности выдается в систему 2 управления полетом, в блок 5 выработки командных сигналов угла отклонения и в устройство 16 индикации.
После поступления результата обнаружения отказа/повреждения управляющей поверхности и оценочных значений аэродинамических коэффициентов блок 5 выработки командных сигналов угла отклонения обрабатывает информацию и затем использует относящуюся к отказу/повреждению часть информации и иные аналогичные составляющие информации для выработки командного сигнала угла отклонения в следующий раз, в то время как система 2 управления полетом решает, на основании результата обнаружения отказа/повреждения управляющей поверхности и оценочных значений аэродинамических коэффициентов, а также в зависимости от тяжести отказа или повреждения управляющей поверхности, использовать ли отказавшую/поврежденную управляющую поверхность в дальнейшем, и перестраивает закон управления полетом. Кроме того, устройство 16 индикации, получив результат обнаружения отказавшей/поврежденной управляющей поверхности, информирует пилота или другого члена экипажа о том, какая именно управляющая поверхность отказала или повреждена.
Ниже со ссылкой на блок-схему, приведенную на фиг.4, рассматривается процесс оценки возможности отказа/повреждения управляющей поверхности, выполняемый в соответственно выполненном устройстве 11 для обнаружения отказа/повреждения управляющей поверхности.
Во время нормального полета летательного аппарата переключатель 14 соединяет управляющее устройство 5В для проверки возможности отказа/повреждения управляющей поверхности с блоком 12 оценки возможности отказа/повреждения управляющей поверхности, и в непрерывном или периодическом режиме оценивается возможность отказа/повреждения управляющей поверхности. Таким образом, как показано на фиг.4, на шаге S21 блок 5 выработки командных сигналов угла отклонения непрерывно или периодически вырабатывает командный сигнал (Tkern) угла отклонения, предназначенный для проверки в отношении возможности отказа/повреждения управляющей поверхности, и выдает этот командный сигнал в блок 12 оценки возможности отказа/повреждения управляющей поверхности. Через блок 12 оценки возможности отказа/повреждения управляющей поверхности командный сигнал угла отклонения, предназначенный для проверки в отношении возможности отказа/повреждения управляющей поверхности, выдается в систему 2 управления полетом. На следующем шаге S22 этот командный сигнал угла отклонения накладывается на командный сигнал угла отклонения, предназначенный для изменения пространственного положения планера летательного аппарата на требуемое или сохранения требуемого пространственного положения планера летательного аппарата и выработанный системой 2 управления полетом, и на основании полученного в результате этого наложения командного сигнала угла отклонения управляющие поверхности 3 перемещаются приводами исполнительной системы, на чертежах не показанной.
На шаге S23 датчик 4 непрерывно или периодически воспринимает параметры движения планера летательного аппарата и выдает свои показания в блок 6 регистрации показаний датчиков. Из блока 6 регистрации показаний датчиков переданная датчиком информация выдается в блок 12 оценки возможности отказа/повреждения управляющей поверхности, который на шаге S24 делает вывод о возможности (вероятности) или невозможности (маловероятности) отказа/повреждения. Блок 12 оценки возможности отказа/повреждения управляющей поверхности исходит из того, что даже в том случае, когда управляющие поверхности 3 перемещаются в соответствии с командным сигналом угла отклонения, предназначенным для проверки в отношении возможности отказа/повреждения управляющей поверхности, это перемещение в нормальном состоянии не должно сообщать движения планеру летательного аппарата. Если показания датчика 4 позволяют заключить, что планер летательного аппарата совершает движение, например раскачивается, блок 12 оценки возможности отказа/повреждения управляющей поверхности делает вывод о возможности отказа/повреждения управляющей поверхности. Тогда процесс переходит к следующему шагу S25. Если же показания датчика 4 позволяют заключить, что планер летательного аппарата не совершает движения, например не раскачивается, блок 12 оценки возможности отказа/повреждения управляющей поверхности делает вывод о невозможности отказа/повреждения управляющей поверхности. Оценка, проводимая на шаге S24, повторяется периодически.
На шаге S25, поскольку блок 12 оценки возможности отказа/повреждения управляющей поверхности сделал вывод о возможности отказа/повреждения управляющей поверхности, коммутационное состояние переключателей 13 и 14 изменяется с тем, чтобы устройство 10 для оценки аэродинамических коэффициентов оценило аэродинамические коэффициенты. В результате блок 12 оценки возможности отказа/повреждения управляющей поверхности соединяется с управляющим устройством 5А для оценки аэродинамических коэффициентов, а блок 6 регистрации показаний датчиков - с каждым из вычислительных устройств 7A-7D. На следующем шаге S26 управляющим устройством 5А для оценки аэродинамических коэффициентов вырабатывается командный сигнал угла отклонения, предназначенный для оценки аэродинамических коэффициентов, и этот сигнал выдается в систему 2 управления полетом. Затем процесс переходит к следующему шагу S27. На шаге S27 система 2 управления полетом вырабатывает командный сигнал угла отклонения для изменения пространственного положения планера летательного аппарата на требуемое или сохранения требуемого пространственного положения планера летательного аппарата, накладывает командный сигнал угла отклонения, выработанный блоком 5 выработки командных сигналов угла отклонения, на этот командный сигнал угла отклонения и выдает полученный в результате этого наложения командный сигнал угла отклонения приводам исполнительной системы, и исполнительная система перемещает управляющие поверхности 3 в соответствии с командным сигналом угла отклонения для оценки аэродинамического коэффициента.
Поскольку перемещение управляющих поверхностей 3 на шаге S27 вызвало, в соответствии с командным сигналом угла отклонения, движение планера летательного аппарата, например покачивание, параметры движения планера летательного аппарата, воспринимаемые датчиком 4 и непрерывно или периодически регистрируемые на шаге S28, изменяются. Датчик 4 воспринимает изменившиеся параметры движения и выдает соответствующую информацию в блок 6 регистрации показаний датчиков.
На шаге S29 вычислительные устройства 7A-7D, входящие в состав блока 7 вычисления предварительных значений, отдельно друг от друга вычисляют предварительные значения, и результаты этого вычисления выдаются в блок 8 определения оценочных значений аэродинамических коэффициентов. На следующем шаге S30 блок 8 определения оценочных значений аэродинамических коэффициентов определяет окончательные оценочные значения аэродинамических коэффициентов на основании предварительных значений, поступивших в него из блока 7 вычисления предварительных значений, и выдает определенные оценочные значения аэродинамических коэффициентов в блок 15 обнаружения отказа/повреждения управляющей поверхности, в блок 5 выработки командных сигналов угла отклонения и в систему 2 управления полетом. Кроме того, на шаге S31 блок 15 обнаружения отказа/повреждения управляющей поверхности на основании оценочных значений аэродинамических коэффициентов определяет, какая именно управляющая поверхность отказала или повреждена. Результат обнаружения отказавшей/поврежденной управляющей поверхности выдается в систему 2 управления полетом, в блок 5 выработки командных сигналов угла отклонения и в устройство 16 индикации, и на этом выполнение программы завершается.
Как описано выше, для выявления отказа/повреждения управляющей поверхности осуществляется предварительная оценка возможности отказа/повреждения управляющей поверхности, и если сделан вывод о возможности отказа/повреждения управляющей поверхности, то вычисляются оценочные значения аэродинамических коэффициентов, на основании которых определяют отказавшую/поврежденную управляющую поверхность. Таким образом, изобретение обеспечивает точное выявление отказа или повреждения управляющей поверхности за счет непрерывного отслеживания возможного отказа/повреждения управляющей поверхности, при этом сводя к минимуму нежелательные движения планера летательного аппарата, например его нежелательное покачивание, и тем самым уменьшая дискомфорт для пассажиров. Для оценки аэродинамических коэффициентов с целью выявления отказа/повреждения управляющей поверхности предварительные значения, используемые для оценки значений аэродинамических коэффициентов, вычисляют на основании двух или более различных методов оценки с помощью вычислительных устройств 7A-7D, после чего на основании предварительных значений окончательно определяют оценочные значения аэродинамических коэффициентов. Это позволяет внести избыточность в оценку значений аэродинамических коэффициентов и поэтому позволяет вычислять достоверные аэродинамические коэффициенты.
Вариант второго объекта изобретения
Ниже со ссылкой на фиг.5 рассматривается устройство для обнаружения отказа/повреждения управляющей поверхности в одном варианте его выполнения.
На фиг.5 приведена структурная схема, схематически представляющая конфигурацию устройства для обнаружения отказа/повреждения управляющей поверхности в другом варианте. В этом варианте устройство для обнаружения отказа/повреждения управляющей поверхности отличается от рассмотренного выше устройства для обнаружения отказа/повреждения управляющей поверхности тем, что независимо от того, выдавался ли командный сигнал угла отклонения, предназначенный для проверки в отношении возможности отказа/повреждения управляющей поверхности, происходит вычисление расчетных значений параметров движения, выполняемое при допущении, что планер летательного аппарата находится в нормальном состоянии, а оценка возможности отказа/повреждения управляющей поверхности проводится на основании расчетных и фактических значений параметров движения планера летательного аппарата. Поэтому в этом варианте устройство для обнаружения отказа/повреждения управляющей поверхности не обязательно должно включать в себя управляющее устройство 5В для проверки возможности отказа/повреждения управляющей поверхности. В приведенном ниже описании конфигурация устройства в части, совпадающей с конфигурацией описанного выше устройства для обнаружения отказа/повреждения управляющей поверхности, не рассматривается, а описываются лишь отличия.
Блок 12 оценки возможности отказа/повреждения управляющей поверхности связан с блоком 6 регистрации показаний датчиков, с блоком 5 выработки командных сигналов угла отклонения, с блоком 8 определения оценочных значений аэродинамических коэффициентов, с системой 2 управления полетом и с блоком 15 обнаружения отказа/повреждения управляющей поверхности и может обмениваться с этими блоками/устройствами разного рода информацией. В памяти блока 12 оценки возможности отказа/повреждения управляющей поверхности заранее сохранена модель движения планера летательного аппарата. В данном случае под моделью движения планера летательного аппарата понимается математическая модель, которая может быть получена при проектировании летательного аппарата, оснащаемого предлагаемым устройством для обнаружения отказа/повреждения управляющей поверхности, и которая выражает движения летательного аппарата. Когда планер летательного аппарата находится в нормальном состоянии, параметры движения планера летательного аппарата могут вычисляться по модели движения планера летательного аппарата. По этой причине во время полета летательного аппарата блок 12 оценки возможности отказа/повреждения управляющей поверхности непрерывно или периодически вычисляет расчетные значения параметров движения при допущении, что планер летательного аппарата находится в нормальном состоянии, на основании модели движения планера летательного аппарата и на основании либо командного сигнала угла отклонения управляющей поверхности, предназначенного для изменения пространственного положения планера летательного аппарата на требуемое или сохранения требуемого пространственного положения планера летательного аппарата во время полета, либо объединенного командного сигнала угла отклонения, полученного наложением командного сигнала угла отклонения, предназначенного для проверки в отношении возможности отказа/повреждения управляющей поверхности, на этот командный сигнал угла отклонения, выработанный системой 2 управления полетом. Одновременно блок 12 оценки возможности отказа/повреждения управляющей поверхности получает, в качестве информации, поступающей из блока 6 регистрации показаний датчиков, фактические параметры движения планера летательного аппарата во время полета на основании либо командного сигнала угла отклонения, предназначенного для изменения или сохранения пространственного положения планера летательного аппарата во время полета, либо объединенного командного сигнала угла отклонения, полученного наложением командного сигнала угла отклонения, предназначенного для проверки в отношении возможности отказа/повреждения управляющей поверхности, на этот командный сигнал угла отклонения, выработанный системой 2 управления полетом.
Для суждения о возможности отказа/повреждения управляющей поверхности блок 12 оценки возможности отказа/повреждения управляющей поверхности получает из блока 6 регистрации показаний датчиков информацию от датчика, полученную в результате перемещения управляющих поверхностей 3 в соответствии либо с командным сигналом угла отклонения управляющей поверхности, предназначенным для изменения или сохранения пространственного положения планера летательного аппарата, либо с объединенным командным сигналом угла отклонения управляющей поверхности, полученным наложением командного сигнала угла отклонения, предназначенного для проверки в отношении возможности отказа/повреждения управляющей поверхности, на этот командный сигнал угла отклонения, выданный из системы 2 управления полетом. Затем блок 12 оценки возможности отказа/повреждения управляющей поверхности сравнивает вычисленные расчетные значения параметров движения с показаниями датчика и на основании различия между расчетными значениями и показаниями датчика делает вывод о возможности или невозможности отказа/повреждения какой-либо из управляющих поверхностей 3.
Иначе говоря, если это различие превышает заданный порог, делается вывод о возможности отказа/повреждения какой-либо из управляющих поверхностей 3, а если это различие не превышает заданного порога, делается вывод о невозможности отказа/повреждения какой-либо из управляющих поверхностей 3. Если сделан вывод о возможности отказа/повреждения управляющей поверхности, блок 12 оценки возможности отказа/повреждения управляющей поверхности принимает на входе командный сигнал угла отклонения управляющей поверхности для оценки аэродинамического коэффициента из управляющего устройства 5А для оценки аэродинамических коэффициентов и выдает этот командный сигнал угла отклонения управляющей поверхности для оценки аэродинамического коэффициента в систему 2 управления полетом. Затем устройство 10 для оценки аэродинамических коэффициентов оценивает аэродинамические коэффициенты, а блок 15 обнаружения отказа/повреждения управляющей поверхности выявляет отказавшие или поврежденные управляющие поверхности 3.
Если установлены отказавшие или поврежденные управляющие поверхности 3, результат обнаружения отказа/повреждения выдается в систему 2 управления полетом, в устройство 16 индикации, в блок 5 выработки командных сигналов угла отклонения и в блок 12 оценки возможности отказа/повреждения управляющей поверхности. Блок 5 выработки командных сигналов угла отклонения, а также блок 12 оценки возможности отказа/повреждения управляющей поверхности накапливают данные результатов обнаружения отказа/повреждения и оценочные значения аэродинамических коэффициентов в случае развития отказа или повреждения управляющих поверхностей 3 и отражают накопленные результаты обнаружения и оценочные значения аэродинамических коэффициентов в следующей оценке возможности отказа/повреждения управляющей поверхности. Иначе говоря, уже полученные результаты обнаружения отказа/повреждения и оценочные значения аэродинамических коэффициентов отражаются при вычислении расчетных значений параметров движения на основании модели движения планера летательного аппарата, и результирующие расчетные значения сравниваются с фактическими параметрами движения. Таким образом, если отказ или повреждение управляющих поверхностей 3 развивается, изобретение позволяет выявить это развитие отказа или повреждения.
Как описано выше, вывод о возможности отказа/повреждения управляющей поверхности делается на основании фактических параметров движения во время полета и расчетных значений параметров движения, рассчитываемых при допущении, что планер летательного аппарата находится в нормальном состоянии. Таким образом, изобретение обеспечивает точное выявление отказа или повреждения управляющей поверхности за счет непрерывного отслеживания возможного отказа/повреждения управляющей поверхности, при этом сводя к минимуму нежелательные движения планера летательного аппарата, например его нежелательное покачивание, и тем самым уменьшая дискомфорт для пассажиров.
Другие варианты второго объекта изобретения
Ниже рассматривается еще один вариант устройства для обнаружения отказа/повреждения управляющей поверхности как второго объекта изобретения. Следует заметить, что принципиальная конфигурация устройства для обнаружения отказа/повреждения управляющей поверхности в этом варианте осуществления изобретения по существу аналогична конфигурации устройства для обнаружения отказа/повреждения управляющей поверхности, представленного на фиг.5, и поэтому она описывается ниже со ссылкой на фиг.5.
Устройство для обнаружения отказа/повреждения управляющей поверхности в рассматриваемом варианте отличается от базового варианта устройства для обнаружения отказа/повреждения управляющей поверхности следующими аспектами. Во-первых, планер летательного аппарата снабжен оптическим волокном или электрическим проводом, посредством которого обнаруживается ненормальное состояние управляющей поверхности. Во-вторых, независимо от того, выдавался ли командный сигнал угла отклонения для проверки в отношении возможности отказа/повреждения управляющей поверхности, вырабатывается либо командный сигнал угла отклонения, предназначенный для изменения пространственного положения планера летательного аппарата на требуемое или сохранения требуемого пространственного положения планера летательного аппарата, либо объединенный командный сигнал угла отклонения, полученный наложением командного сигнала угла отклонения, предназначенного для проверки в отношении возможности отказа/повреждения управляющей поверхности, на этот командный сигнал угла отклонения, а затем регистрируется фактический угол отклонения, полученный в результате перемещения управляющих поверхностей, имеющихся на планере летательного аппарата, на основании выработанного командного сигнала угла отклонения, и вычисляется расчетное значение угла отклонения, представляющее угол отклонения управляющей поверхности, рассчитанный на основании командного сигнала угла отклонения при допущении, что планер летательного аппарата находится в нормальном состоянии. На основании различий между этими значениями устройство для обнаружения отказа/повреждения управляющей поверхности в этом варианте судит о возможности повреждения управляющей поверхности на основании результата обнаружения ненормального состояния оптического волокна или иного аналогичного средства, а о возможности отказа управляющей поверхности - на основании фактического угла отклонения и расчетного значения угла отклонения. Таким образом, в этом варианте устройство для обнаружения отказа/повреждения управляющей поверхности не обязательно должно включать в себя управляющее устройство 5В для проверки возможности отказа/повреждения управляющей поверхности. В рассматриваемом варианте конфигурация устройства для обнаружения отказа/повреждения управляющей поверхности во многом совпадает с конфигурацией этого же устройства в предыдущем варианте, поэтому ниже описываются лишь отличия.
В рассматриваемом варианте применено оптическое волокно или электрический провод (на чертежах не показаны), предназначенное(ый) для обнаружения деформаций или повреждения планера летательного аппарата и проложенное(ый) по наружной поверхности или во внешней обшивке конструкции планера летательного аппарата, оснащаемого устройством для обнаружения отказа/повреждения управляющей поверхности в рассматриваемом варианте его выполнения. Деформация планера летательного аппарата приводит к изменению количества света, пропускаемого оптическим волокном, или к изменению сопротивления электрического провода, а повреждение планера летательного аппарата приводит к невозможности передачи света по оптическому волокну или к разрыву электрической цепи. По этой причине оптическое волокно или электрический провод подключено/подключен к датчику контроля состояния, способному обнаруживать ненормальное состояние на основании количества света, пропускаемого оптическим волокном, или на основании сопротивления электрического провода.
Блок 12 оценки возможности отказа/повреждения управляющей поверхности связан с блоком 6 регистрации показаний датчиков, с блоком 5 выработки командных сигналов угла отклонения, с блоком 8 определения оценочных значений аэродинамических коэффициентов, с системой 2 управления полетом и с блоком 15 обнаружения отказа/повреждения управляющей поверхности и может обмениваться с этими блоками/устройствами разного рода информацией. В памяти блока 12 оценки возможности отказа/повреждения управляющей поверхности заранее сохранена модель перемещений управляющих поверхностей. В данном случае под моделью перемещений управляющих поверхностей понимается математическая модель системы управления перемещением управляющих поверхностей, включая исполнительную систему, которая может быть получена при проектировании летательного аппарата, оснащаемого предлагаемым устройством для обнаружения отказа/повреждения управляющей поверхности, и если управляющие поверхности находятся в нормальном состоянии, то угол отклонения управляющих поверхностей, получаемый в результате их перемещения на основании заданного командного сигнала угла отклонения управляющей поверхности, может вычисляться по модели перемещений управляющих поверхностей. По этой причине во время полета летательного аппарата блок 12 оценки возможности отказа/повреждения управляющей поверхности непрерывно вычисляет по модели перемещений управляющих поверхностей расчетное значение угла отклонения, представляющее угол отклонения, рассчитанный при допущении, что планер летательного аппарата находится в нормальном состоянии, а также либо командный сигнал угла отклонения, предназначенный для изменения пространственного положения планера летательного аппарата на требуемое или сохранения требуемого пространственного положения планера летательного аппарата во время полета, либо объединенный командный сигнал угла отклонения, полученный наложением командного сигнала угла отклонения, предназначенного для проверки в отношении возможности отказа/повреждения управляющей поверхности, на этот командный сигнал угла отклонения. Одновременно блок 12 оценки возможности отказа/повреждения управляющей поверхности получает в качестве информации от датчика, поступающей из блока 6 регистрации показаний датчиков, фактический угол отклонения поверхностей планера летательного аппарата во время полета на основании либо командного сигнала угла отклонения, предназначенного для изменения или сохранения пространственного положения планера летательного аппарата во время полета, либо объединенного командного сигнала угла отклонения, полученного наложением командного сигнала угла отклонения, предназначенного для проверки в отношении возможности отказа/повреждения управляющей поверхности, на этот командный сигнал угла отклонения.
При оценке возможности отказа/повреждения управляющей поверхности блок 12 оценки возможности отказа/повреждения управляющей поверхности принимает показания датчика контроля состояния и судит о возможности повреждения управляющей поверхности. Иначе говоря, если показания датчика контроля состояния указывают на ненормальное состояние, делается вывод о возможности, т.е. вероятности, повреждения управляющей поверхности, а если показания датчика контроля состояния указывают на нормальное состояние, делается вывод о невозможности, т.е. маловероятности, повреждения управляющей поверхности.
Кроме того, блок 12 оценки возможности отказа/повреждения управляющей поверхности принимает на входе либо командный сигнал угла отклонения, предназначенный для изменения или сохранения пространственного положения планера летательного аппарата, либо объединенный командный сигнал угла отклонения, полученный наложением командного сигнала угла отклонения, предназначенного для проверки в отношении возможности отказа/повреждения управляющей поверхности, на этот командный сигнал угла отклонения, который был выдан системой 2 управления полетом, и учитывает угол отклонения управляющих поверхностей, получаемый в результате их перемещения 3 в соответствии с командным сигналом угла отклонения из блока 6 регистрации показаний датчиков. Затем блок 12 оценки возможности отказа/повреждения управляющей поверхности сравнивает вычисленное расчетное значение угла отклонения с полученным углом отклонения и на основании различия между расчетным значением угла отклонения и собственно углом отклонения делает вывод о возможности или невозможности отказа какой-либо из управляющих поверхностей 3.
Иначе говоря, если это различие превышает заданный порог, делается вывод о возможности отказа какой-либо из управляющих поверхностей 3, а если это различие не превышает заданного порога, делается вывод о невозможности отказа какой-либо из управляющих поверхностей 3.
Если сделан вывод о возможности отказа/повреждения управляющих поверхностей 3, блок 12 оценки возможности отказа/повреждения управляющей поверхности принимает на входе из управляющего устройства 5А для оценки аэродинамических коэффициентов командный сигнал угла отклонения, предназначенный для оценки аэродинамического коэффициента, и выдает этот командный сигнал в систему 2 управления полетом, после чего устройство 10 для оценки аэродинамических коэффициентов оценивает аэродинамические коэффициенты, а блок 15 обнаружения отказа/повреждения управляющей поверхности выявляет отказавшие или поврежденные управляющие поверхности 3.
Если установлено, что управляющие поверхности 3 отказали или повреждены, результат обнаружения отказа/повреждения выдается в систему 2 управления полетом, в устройство 16 индикации, в блок 5 выработки командных сигналов угла отклонения и в блок 12 оценки возможности отказа/повреждения управляющей поверхности. Блок 5 выработки командных сигналов угла отклонения и блок 12 оценки возможности отказа/повреждения управляющей поверхности накапливают данные результатов обнаружения отказа/повреждения и разностные оценочные значения аэродинамических коэффициентов в случае развития отказа или повреждения управляющих поверхностей 3, и накопленные результаты обнаружения и оценочные значения отражаются в следующей оценке возможности отказа/повреждения управляющей поверхности.
Как описано выше, вывод о возможности повреждения управляющей поверхности делается на основании результата обнаружения ненормального состояния оптического волокна или электрического провода, а вывод о возможности отказа управляющей поверхности делается на основании фактического угла отклонения во время полета и расчетного значения угла отклонения, рассчитанного при допущении, что планер летательного аппарата находится в нормальном состоянии. Таким образом, изобретение обеспечивает точное выявление отказа или повреждения управляющей поверхности за счет непрерывного отслеживания возможного отказа/повреждения управляющей поверхности, при этом сводя к минимуму нежелательные движения планера летательного аппарата, например его нежелательное покачивание, и тем самым уменьшая дискомфорт для пассажиров.
Следует заметить, что для оценки возможности отказа/повреждения управляющей поверхности, помимо суждения о такой возможности на основании результата сравнения расчетных значений параметров движения, основанных на модели движения планера летательного аппарата, и фактических параметров движения, а также суждения о такой возможности на основании результата обнаружения ненормального состояния оптического волокна или электрического провода и результата сравнения расчетного значения угла отклонения, основанного на модели перемещений управляющих поверхностей, и фактического угла отклонения, судить о такой возможности также можно на основании параметров движения летательного аппарата, полученных в результате перемещения управляющей поверхности в соответствии с командным сигналом угла ее отклонения, предназначенным для проверки наличия отказа/повреждения управляющей поверхности и выдаваемым описанным выше управляющим устройством 5В для проверки возможности отказа/повреждения управляющей поверхности.
Это может быть реализовано, например, с помощью устройства для обнаружения отказа/повреждения управляющей поверхности, имеющего конфигурацию, показанную на фиг.6. В частности, устройство для обнаружения отказа/повреждения управляющей поверхности содержит логический блок 17 оценки возможности отказа/повреждения управляющей поверхности, включающий в себя вычислительное устройство 17А, в котором сохраняется информация, относящаяся к оценке возможности отказа/повреждения на основании результата сравнения расчетных значений параметров движения, основанных на модели движения планера летательного аппарата, и фактических параметров движения, вычислительное устройство 17В, в котором сохраняется информация, относящаяся к оценке возможности отказа/повреждения на основании результата обнаружения ненормального состояния оптического волокна или электрического провода и результата сравнения расчетного значения угла отклонения, основанного на модели перемещений управляющих поверхностей, и фактического угла отклонения, и вычислительное устройство 17С, в котором сохраняется информация, относящаяся к оценке возможности отказа/повреждения на основании параметров движения, полученных в результате перемещения в соответствии с командным сигналом угла отклонения, предназначенным для проверки наличия отказа/повреждения управляющей поверхности. Тогда соединение между логическим блоком 17 оценки возможности отказа/повреждения управляющей поверхности и переключателем 14 изменяется таким образом, чтобы судить о возможности отказа/повреждения управляющей поверхности можно было на основании любого из методов оценки, а значит, чтобы возможность отказа/повреждения можно было оценивать требуемым образом. Затем это соединение можно последовательно изменять, например, оценивая возможность отказа/повреждения управляющей поверхности на основании другого подходящего метода, что позволяет судить о возможности отказа/повреждения управляющей поверхности на основании комбинации из двух или трех методов оценки.
Перечень ссылочных обозначений
1 Устройство для оценки аэродинамического коэффициента
2 Система управления полетом
3 Управляющая поверхность
4 Датчик
5 Блок выработки командных сигналов угла отклонения (средство выработки командных сигналов угла отклонения)
6 Блок регистрации информации от датчика (блок регистрации параметров движения)
7 Блок вычисления предварительных значений (средство вычисления предварительных значений)
8 Блок определения оценочных значений аэродинамических коэффициентов (средство определения оценочного значения аэродинамического коэффициента)
10 Устройство для оценки аэродинамических коэффициентов
11 Устройство для обнаружения отказа/повреждения управляющей поверхности
12 Блок оценки возможности отказа/повреждения управляющей поверхности (средство оценки возможности отказа/повреждения)
13 Переключатель
14 Переключатель
15 Блок обнаружения отказа/повреждения управляющей поверхности (средство обнаружения отказа/повреждения управляющей поверхности)
16 Устройство индикации
17 Логический блок оценки возможности отказа/повреждения управляющей поверхности
17А, 17В и 17С Вычислительное устройство
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2537883C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ, САМОЛЕТ И СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2012 |
|
RU2561168C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| Способ мониторинга технического состояния планера и шасси летательного аппарата и устройство для его осуществления | 2017 |
|
RU2678540C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| СПОСОБ РАЗВЕРТЫВАНИЯ И ВЫСОТНОЙ ПОДВЕСКИ ИНФОРМАЦИОННОЙ СИСТЕМЫ И НЕСУЩИЙ АЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2392188C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2506553C2 |
| Способ и устройство для защиты максимальной подъемной силы воздушного судна | 2016 |
|
RU2731194C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ОШИБОЧНЫХ ИЗМЕРЕНИЙ ДАВЛЕНИЯ В СИСТЕМЕ ВОЗДУШНЫХ СИГНАЛОВ С НЕВЫСТУПАЮЩИМИ ПРИЕМНИКАМИ ДАВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ЭПЮР ДАВЛЕНИЙ МЕЖДУ СОСЕДНИМИ ОТВЕРСТИЯМИ ДЛЯ ОТБОРА ДАВЛЕНИЯ | 2019 |
|
RU2771090C1 |
Группа изобретений относится к авиации. Устройство для оценки аэродинамического коэффициента содержит средство (5) выработки командных сигналов угла отклонения. Средство (6) регистрации параметра движения управляющей поверхности на основании командного сигнала угла отклонения, средство (7) вычисления и средство (8) определения оценочного значения аэродинамического коэффициента. Устройство для обнаружения отказа/повреждения управляющей поверхности содержит средство оценки и устройство для оценки аэродинамического коэффициента. Группа изобретений направлена на выявление отказа/повреждения управляющей поверхности при одновременном уменьшении дискомфорта для пассажиров. 2 н. и 6 з.п. ф-лы, 6 ил.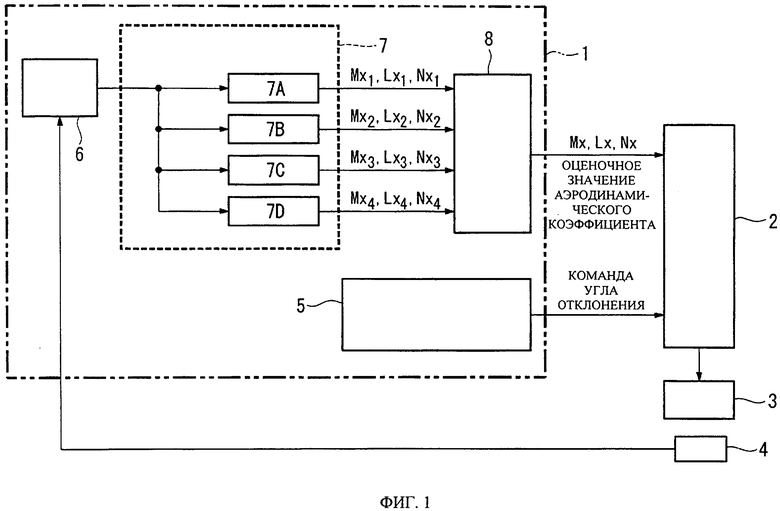
1. Устройство для оценки аэродинамического коэффициента, содержащее:
- средство выработки командных сигналов угла отклонения, вырабатывающее командный сигнал угла отклонения управляющей поверхности для оценки аэродинамического коэффициента, показывающего аэродинамическую характеристику планера летательного аппарата;
- средство регистрации параметра движения, регистрирующее параметр движения планера летательного аппарата, полученный в результате перемещения предусмотренной на планере летательного аппарата управляющей поверхности на основании командного сигнала угла отклонения;
- средство вычисления предварительных значений, вычисляющее предварительные значения, предназначенные для оценки аэродинамического коэффициента, по параметру движения с использованием двух или более различных методов оценки; и
- средство определения оценочного значения аэродинамического коэффициента, определяющее на основании предварительных значений оценочное значение аэродинамического коэффициента.
2. Устройство для оценки аэродинамического коэффициента по п.1, в котором средство определения оценочного значения аэродинамического коэффициента определяет среднее или медиану предварительных значений в качестве оценочного значения аэродинамического коэффициента.
3. Устройство для оценки аэродинамического коэффициента по п.1, в котором средство определения оценочного значения аэродинамического коэффициента определяет в качестве оценочного значения аэродинамического коэффициента предварительное значение, соответствующее одному из воспроизведенных значений параметра движения, вычисленных на основании соответствующих предварительных значений, являющемуся ближайшим к параметру движения.
4. Устройство для обнаружения отказа/повреждения управляющей поверхности, содержащее:
- средство оценки возможности отказа/повреждения, делающее вывод о возможности отказа/повреждения управляющей поверхности;
- устройство для оценки аэродинамического коэффициента по любому из пп.1-3; и
- средство обнаружения отказа/повреждения управляющей поверхности, которое выявляет отказавшую или поврежденную управляющую поверхность на основании оценочного значения аэродинамического коэффициента, полученного устройством для оценки аэродинамического коэффициента, если средством оценки возможности отказа/повреждения сделан вывод о возможности отказа/повреждения какой-либо управляющей поверхности.
5. Устройство для обнаружения отказа/повреждения управляющей поверхности по п.4, в котором средство оценки возможности отказа/повреждения содержит:
- другой блок выработки командных сигналов угла отклонения, вырабатывающий командный сигнал угла отклонения для перемещения управляющей поверхности таким образом, чтобы не сообщать движение планеру летательного аппарата; и
- другое средство регистрации параметра движения, регистрирующее параметр движения планера летательного аппарата, полученный в результате перемещения предусмотренной на планере летательного аппарата управляющей поверхности на основании командного сигнала угла отклонения,
причем вывод о возможности отказа/повреждения управляющей поверхности делается на основании параметра движения.
6. Устройство для обнаружения отказа/повреждения управляющей поверхности по п.4, в котором средство оценки возможности отказа/повреждения содержит:
- еще одно средство выработки командных сигналов угла отклонения, вырабатывающее командный сигнал угла отклонения управляющей поверхности для изменения пространственного положения планера летательного аппарата на требуемое или сохранения требуемого пространственного положения планера летательного аппарата;
- еще одно средство регистрации параметра движения, регистрирующее параметр движения планера летательного аппарата во время полета на основании командного сигнала угла отклонения; и
- средство расчета параметра движения, вычисляющее расчетное значение параметра движения, представляющее параметр движения, рассчитанный при допущении, что планер летательного аппарата находится в нормальном состоянии,
причем вывод о возможности отказа/повреждения управляющей поверхности делается на основании зарегистрированного параметра движения и расчетного значения параметра движения.
7. Устройство для обнаружения отказа/повреждения управляющей поверхности по п.4, содержащее:
- оптическое волокно или электрический провод, проложенное(ый) по планеру летательного аппарата; и
- средство контроля состояния, обнаруживающее ненормальное состояние оптического волокна или электрического провода,
причем средство оценки возможности отказа/повреждения содержит:
- еще одно средство выработки командных сигналов угла отклонения, вырабатывающее командный сигнал угла отклонения управляющей поверхности для изменения пространственного положения планера летательного аппарата на требуемое или сохранения требуемого пространственного положения планера летательного аппарата;
- средство регистрации угла отклонения, регистрирующее угол отклонения предусмотренной на планере летательного аппарата управляющей поверхности, получаемый в результате ее перемещения на основании командного сигнала угла отклонения; и
- средство расчета угла отклонения, вычисляющее расчетное значение угла отклонения, представляющее угол отклонения управляющей поверхности, рассчитанный на основании командного сигнала угла отклонения при допущении, что планер летательного аппарата находится в нормальном состоянии,
причем вывод о возможности повреждения управляющей поверхности делается на основании результата обнаружения на выходе средства контроля состояния оптического волокна или электрического провода, а вывод о возможности отказа управляющей поверхности делается на основании угла отклонения и расчетного значения угла отклонения.
8. Устройство для обнаружения отказа/повреждения управляющей поверхности по п.4, в котором средство обнаружения отказа/повреждения управляющей поверхности выявляет отказ или повреждение управляющей поверхности путем сравнения оценочного значения аэродинамического коэффициента либо с оценочным значением аэродинамического коэффициента планера летательного аппарата в нормальном состоянии, либо с оценочным значением аэродинамического коэффициента, полученным при предыдущем обнаружении отказа/повреждения управляющей поверхности.
| JP 2003175896 A, 24.06.2003; | |||
| JP 6336199 A, 06.12.1994; | |||
| RU 2008127175 A, 20.01.2010 |

