ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Отсутствует
Положение о федеральном финансировании исследования или проекта
[0002] Отсутствует
Область техники, к которой относится изобретение
[0003] Технология, описанная в данном документе, относится к методологии защиты управления полетом для воздушного судна. В частности, описанные в данном документе примерные технологии ограничивают коэффициент подъемной силы крыла в зависимости от динамического давления (или скорости) для создания ограничения максимальной подъемной силы, производимой крылом.
Уровень техники и сущность изобретения
[0004] В документе USP 8,214,089 (который включен сюда путем ссылки), принадлежащем одному и тому же правообладателю, раскрыта система управления полетом, которая приводит в движение поверхности управления, такие как рули высоты, по команде пилота, суммированной с автоматической командой. Система управления полетом контролирует ряд параметров полета, таких как угол атаки (AOA), для определения того, эксплуатируется ли летательный аппарат в допустимом диапазоне. Система управления полетом включает в себя автоматические защиты посредством автоматических команд в случае, если летательный аппарат приближается к зоне своих предельных значений.
[0005] Хотя технологии, раскрытые в данном патенте, являются весьма полезными, дальнейшие улучшения являются возможными и желательными.
Краткое описание чертежей
[0006] Приведенное ниже подробное описание примерных неограничивающих иллюстративных вариантов осуществления следует рассматривать совместно с чертежами, на которых:
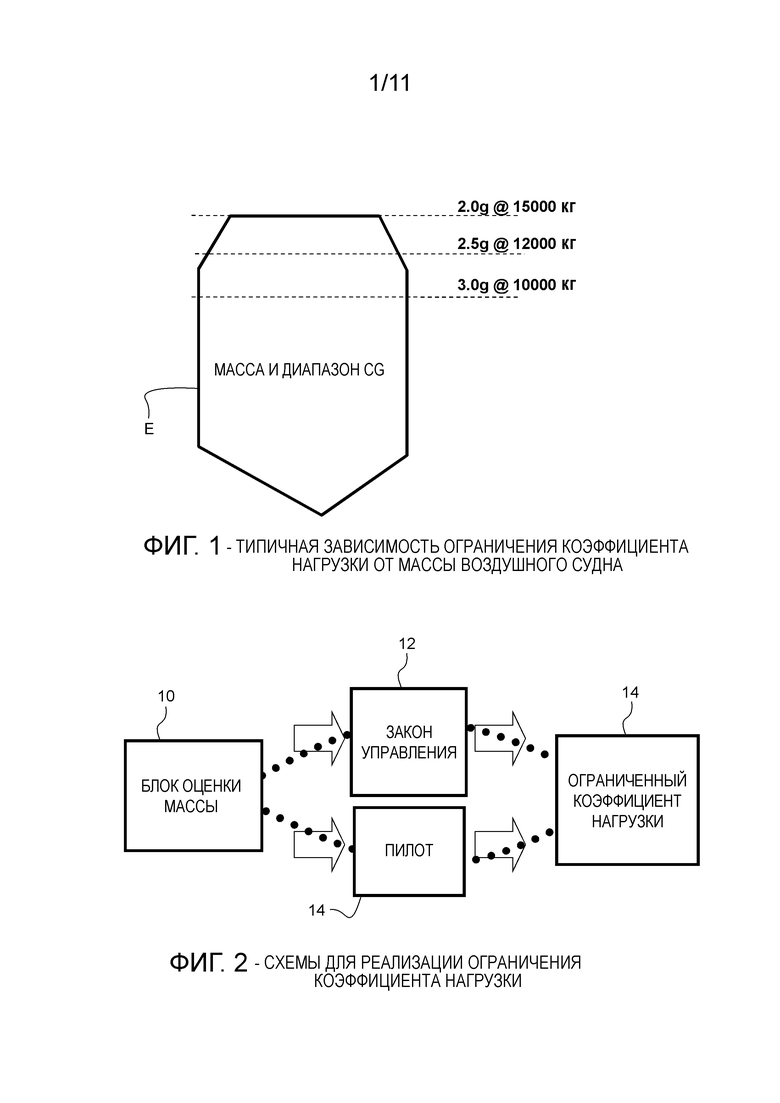
[0007] на фиг.1 показано примерное неограничивающее типичное ограничение коэффициента нагрузки в зависимости от массы воздушного судна;
[0008] на фиг.2 показаны примерные неограничивающие схемы для реализации ограничения коэффициента нагрузки;
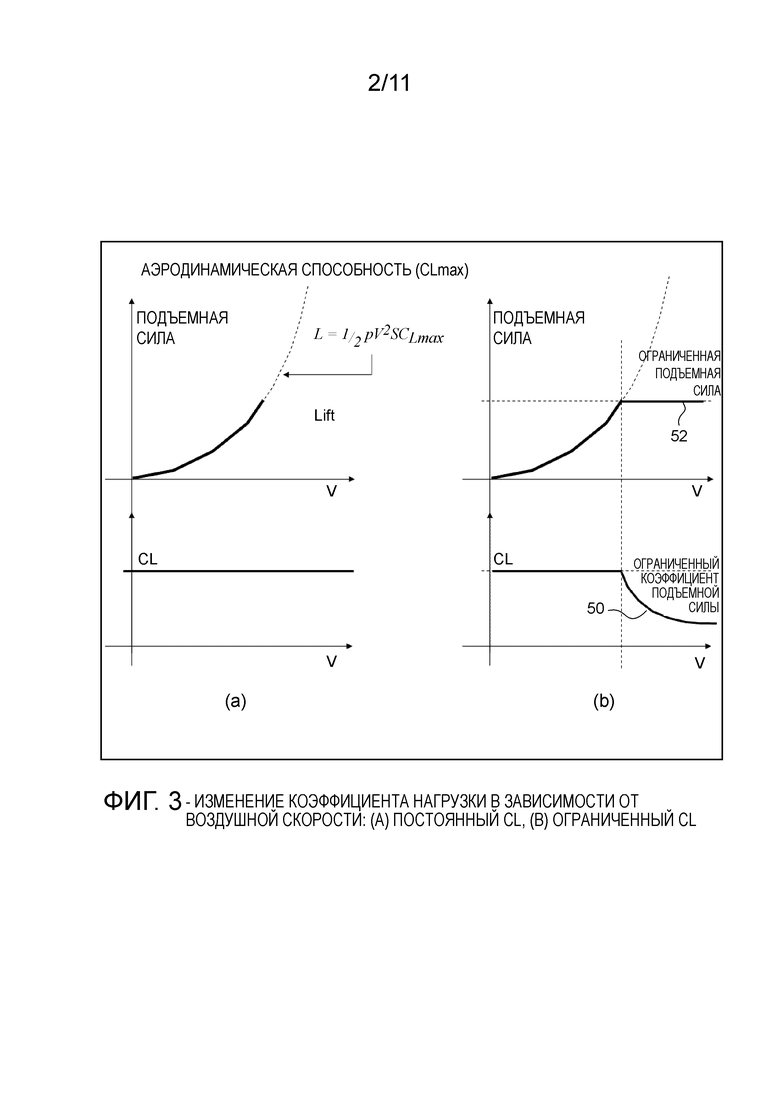
[0009] на фиг.3(a) и 3(b) показаны примерные изменения коэффициента нагрузки в зависимости от воздушной скорости и коэффициента подъемной силы;
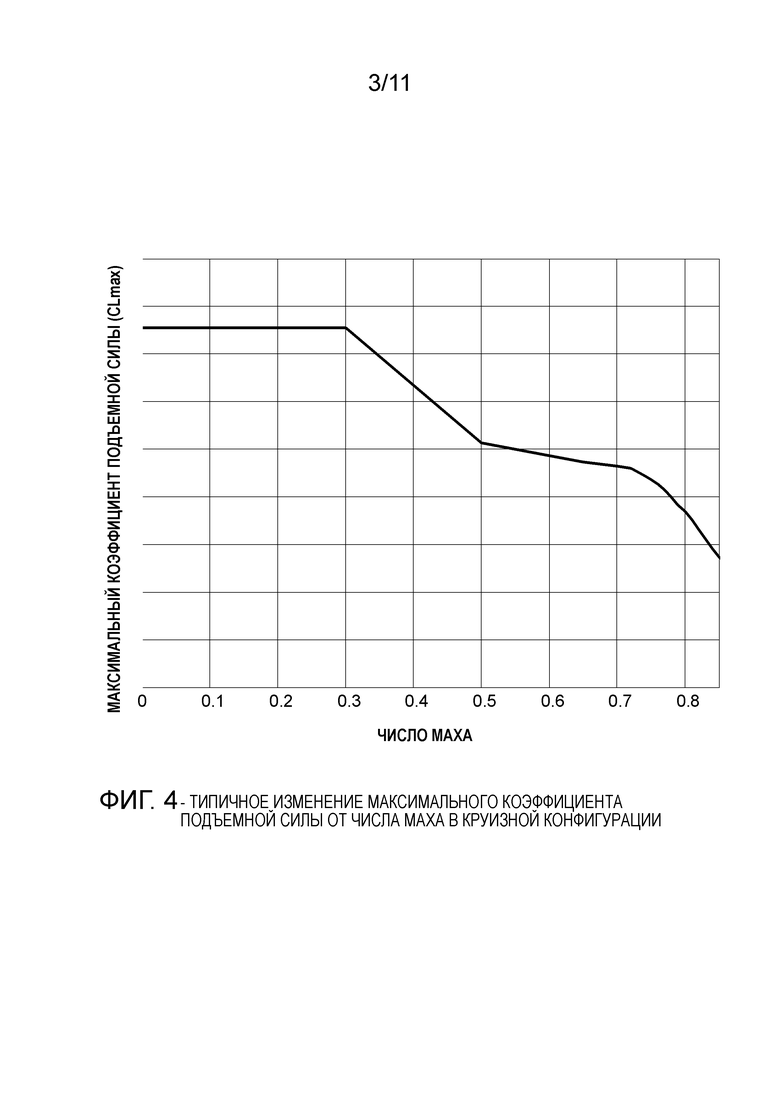
[0010] на фиг.4 показано типичное изменение максимального коэффициента подъемной силы в зависимости от числа Маха для воздушного судна в крейсерской конфигурации;
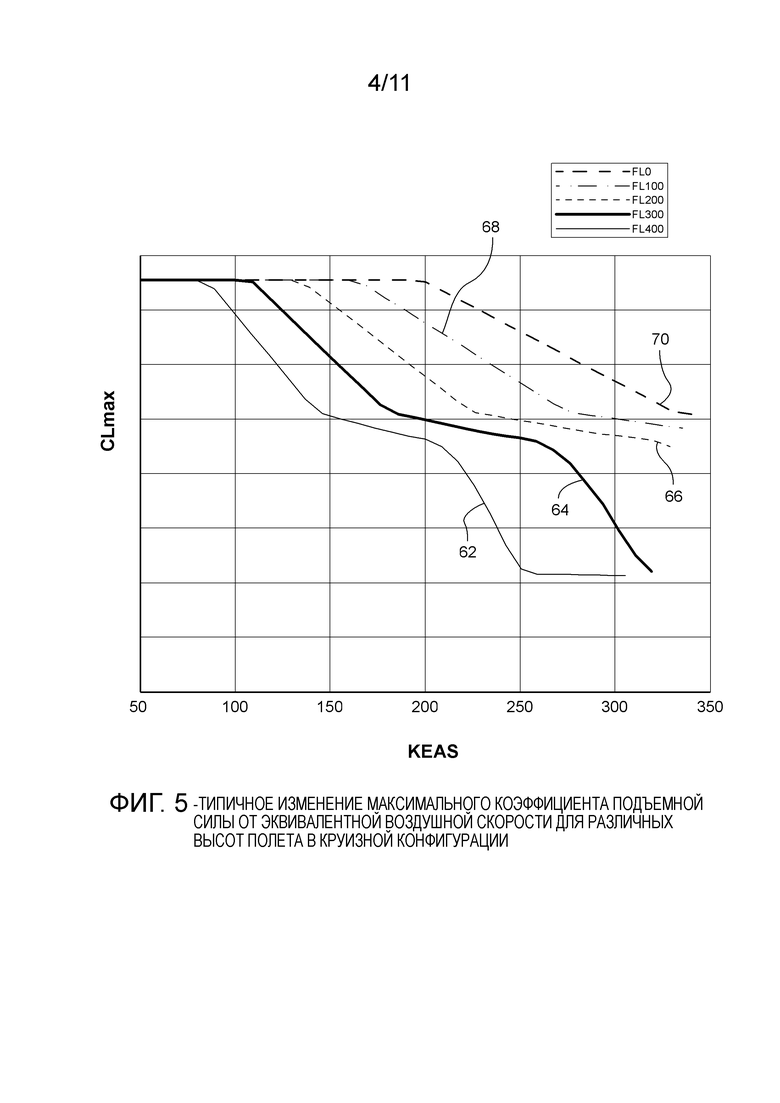
[0011] на фиг.5 показано типичное изменение максимального коэффициента подъемной силы в зависимости от эквивалентной воздушной скорости для воздушного судна в крейсерской конфигурации для различных высот полета;
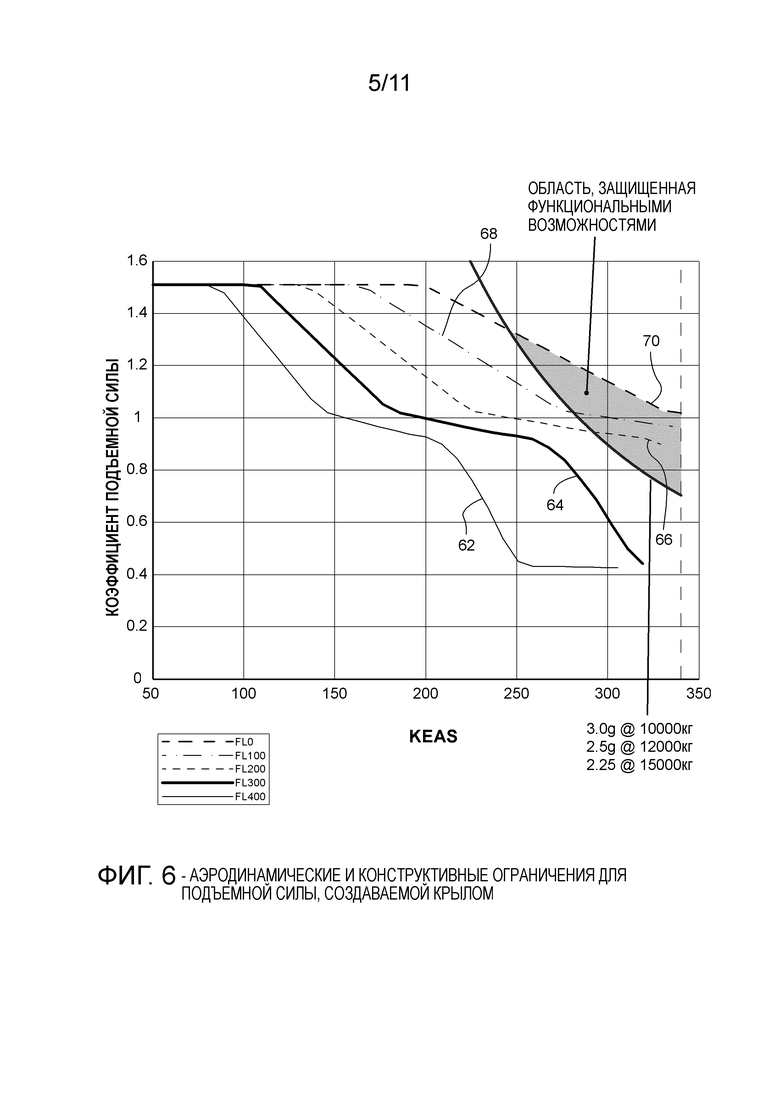
[0012] на фиг.6 показан примерный график при аэродинамических и прочностных ограничениях для подъемной силы, создаваемой крылом;
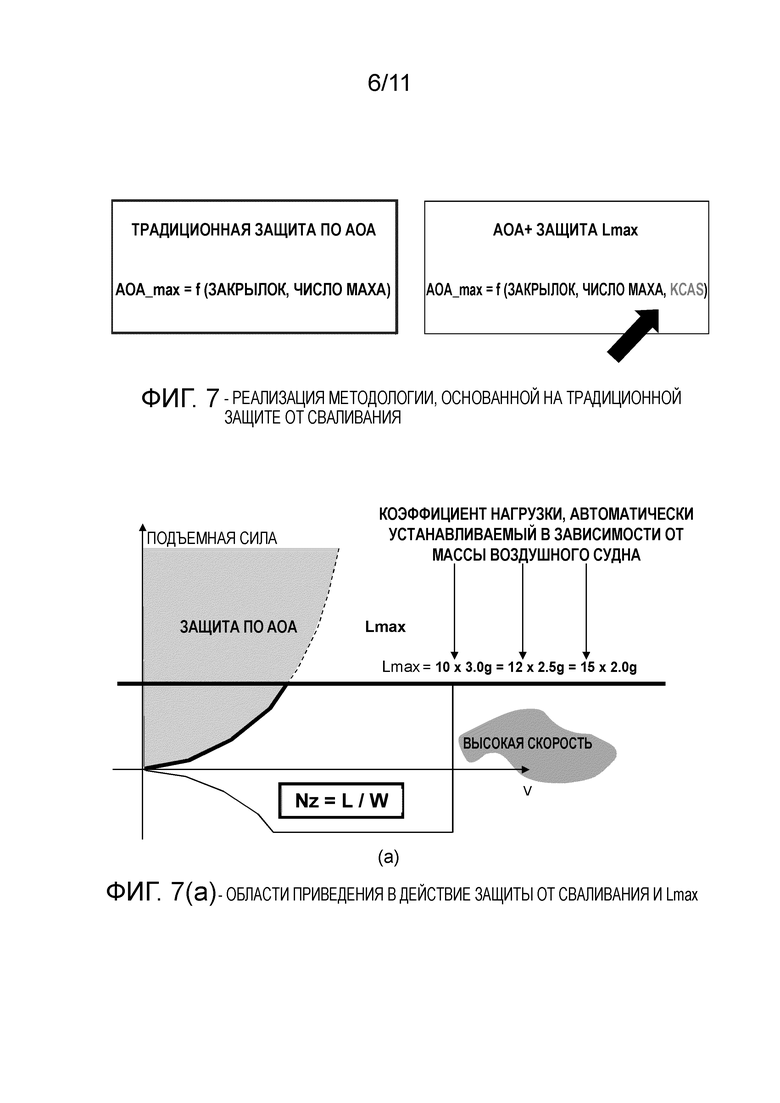
[0013] на фиг.7 показана примерная неограничивающая реализация на основе традиционной защиты от сваливания;
[0014] на фиг.7(a) показаны примерные области приведения в действие защит Lmax и от сваливания;
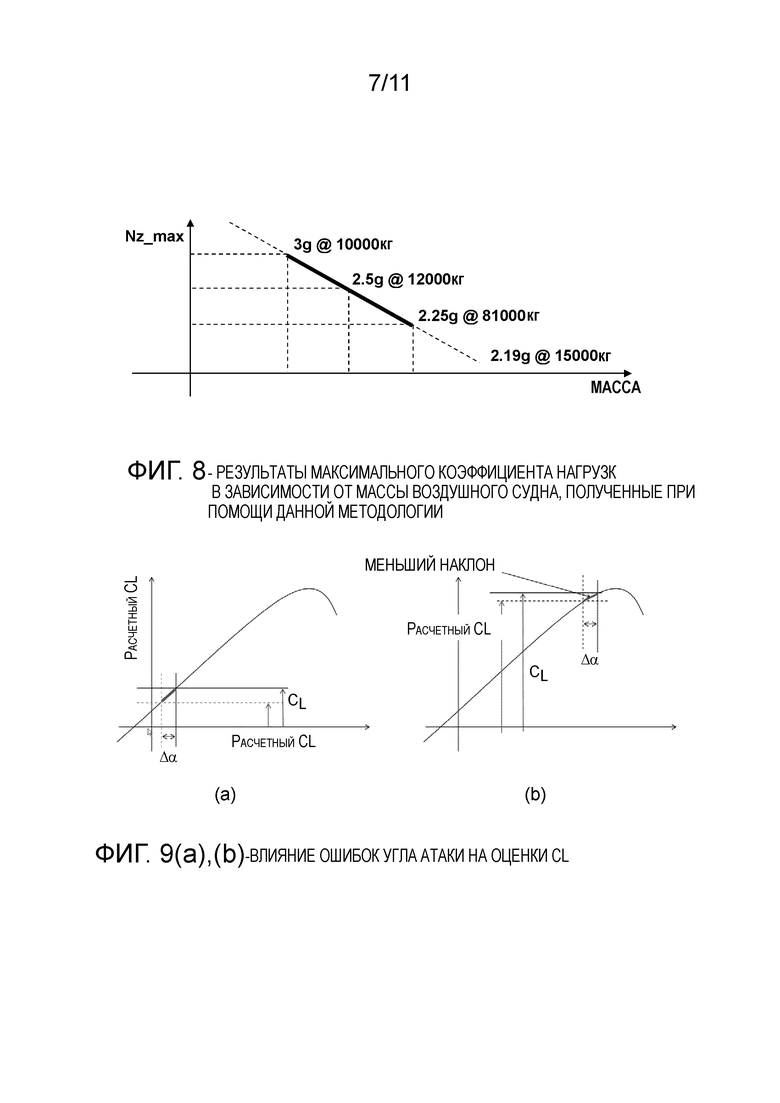
[0015] на фиг.8 показаны примерные результаты зависимости максимального коэффициента нагрузки от массы воздушного судна, полученные с помощью данной методологии;
[0016] на фиг.9(a) и 9(b) показано влияние ошибок угла атаки на оценки CL;
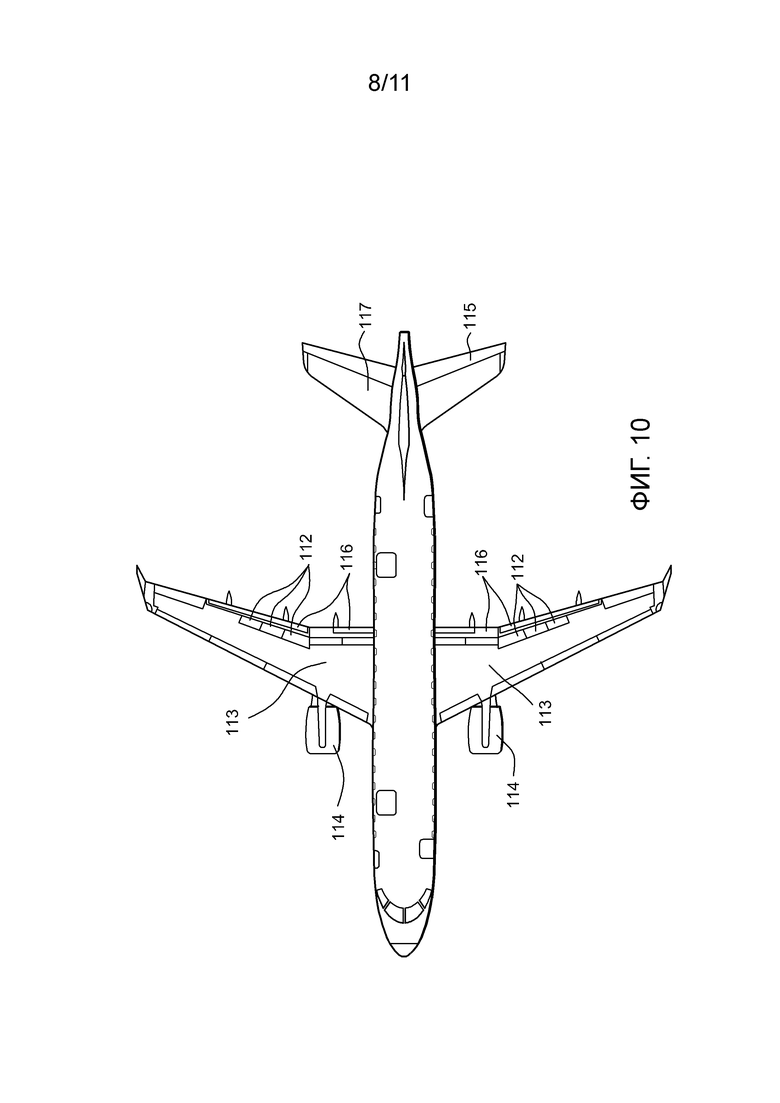
[0017] на фиг.10 показан примерный летательный аппарат;
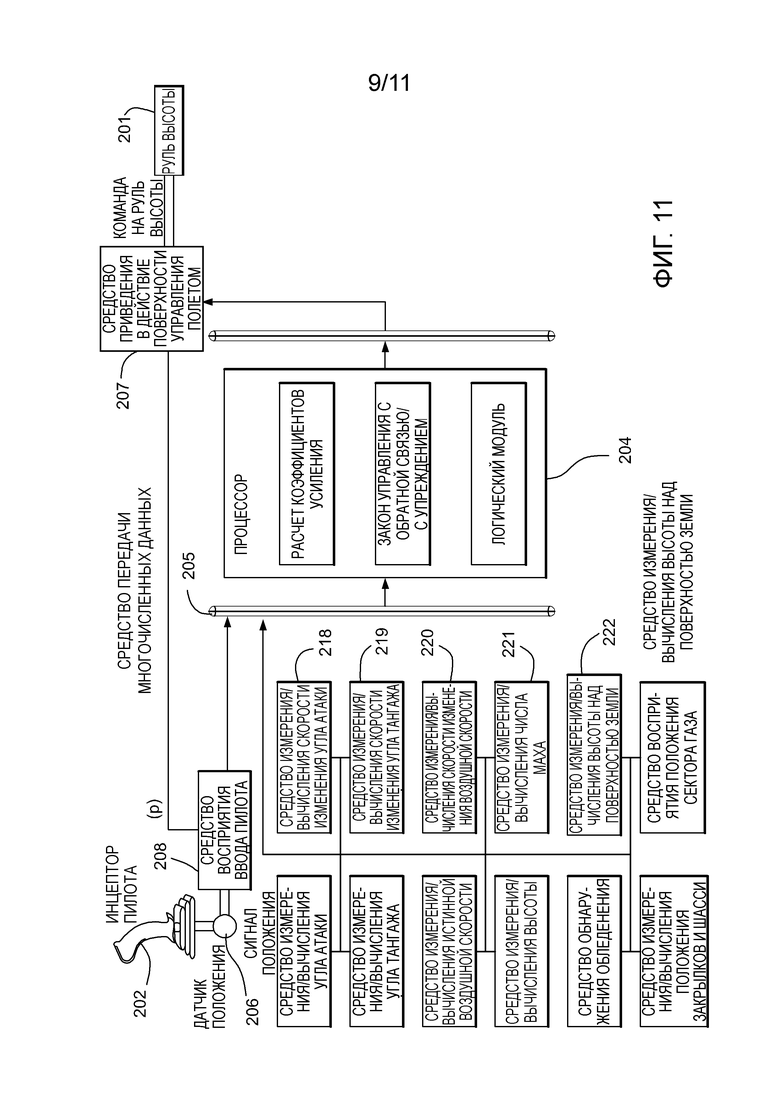
[0018] на фиг.11 показана упрощенная схема примерной иллюстративной неограничивающей системы управления полетом, иллюстрирующая базовую архитектуру системы;
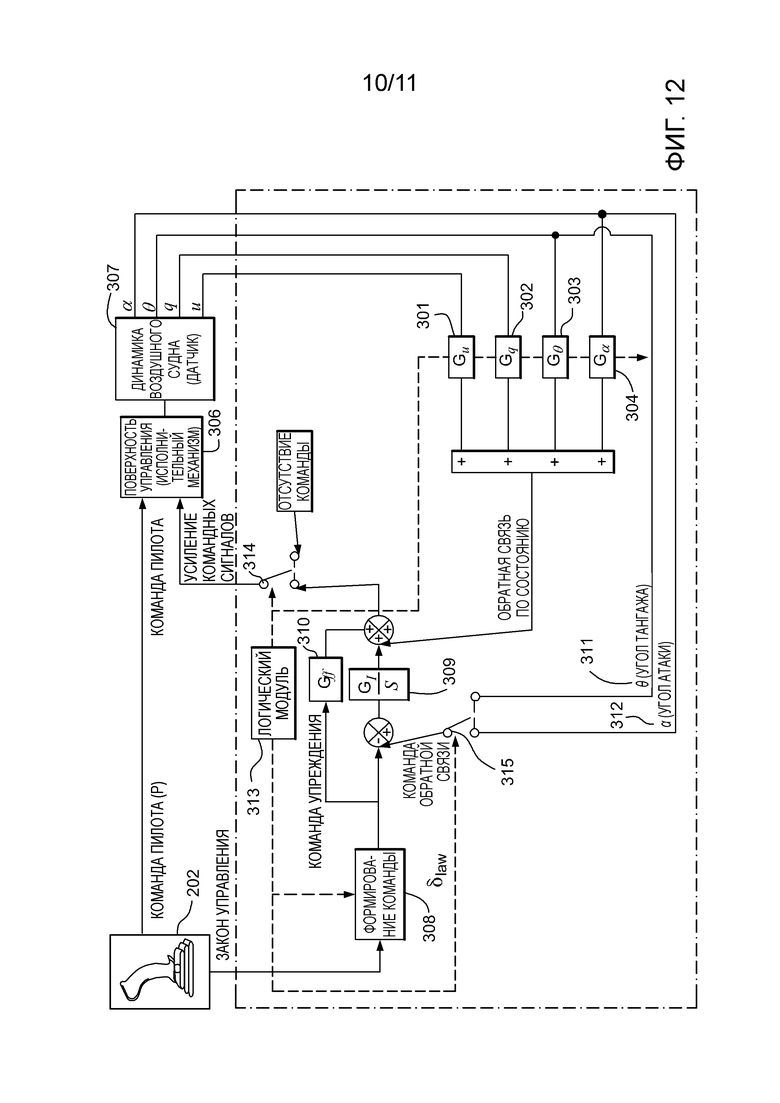
[0019] на фиг.12 показан схематичный чертеж примерного иллюстративного неограничивающего программного обеспечения, которое подвергает обработке функцию примерной системы управления полетом, показывая то, как команда пилота преобразуется в команду на руль высоты в зависимости от логического модуля, который обеспечивает это; и
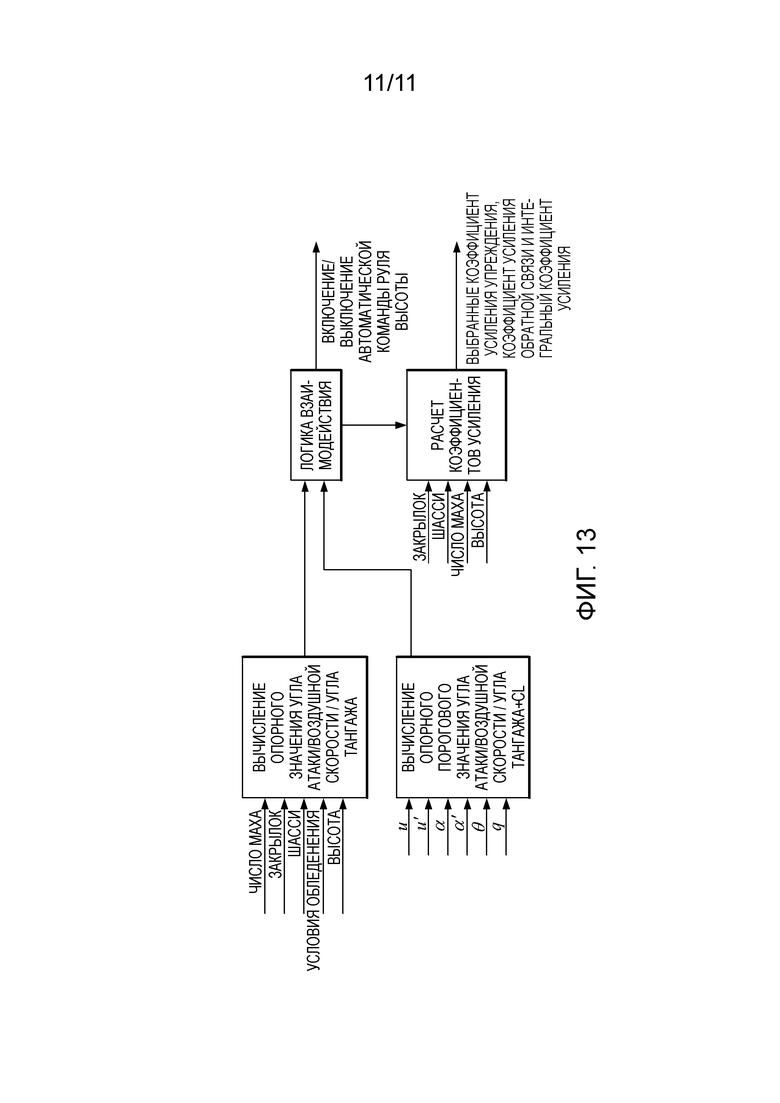
[0020] на фиг.13 показана схема, которая детализирует примерный иллюстративный неограничивающий логический модуль.
Подробное описание изобретения
[0021] Примерная неограничивающая методология и устройство модифицируют традиционную защиту по диапазону угла атаки (AOA), который раскрыт в документе USP 8,214,089, для выполнения дополнительной защиты конструкции, такой как защита максимальной подъемной силы.
[0022] В примерных неограничивающих вариантах осуществления построены таблицы AOA_max в зависимости от ряда параметров, которые содержат в себе динамическое давление. Динамическое давление можно вычислить, используя различные комбинации параметров, например: Qdyn (динамическое давление), KCAS (индикаторная воздушная скорость в узлах), KEAS (фактическая воздушная скорость в узлах), число Маха и высота.
[0023] При определении рабочего диапазона режимов грузового воздушного судна часто используется ограничение максимального коэффициента нагрузки в зависимости от массы воздушного судна для того, чтобы оптимизировать летно-технические характеристики воздушного судна для различных задач полета. Фиг.1 схематично иллюстрирует массу гипотетического воздушного судна и определенный диапазон центровок (cg), связанный с максимальным коэффициентом нагрузки воздушного судна. Обычно ограничение коэффициента нагрузки в зависимости от массы предназначено для осуществления выбора между маневренностью воздушного судна и допустимой нагрузкой, при этом всегда соблюдая прочностные ограничения для воздушного судна. Обычно это условие выполняется в том случае, когда не превышена заданная величина подъемной силы, создаваемой крылом. То есть произведение массы на коэффициент нагрузки остается постоянным, как показано на фиг.1.
[0024] Обычный процесс ограничения коэффициента нагрузки основан на использовании блоков оценки массы. Как показано на фиг.2, оценку (10) массы можно использовать по меньшей мере двумя способами:
[0025] 1. Воздушное судно с электродистанционной системой управления (FBW) (с обратной связью): компьютер управления полетом реализует закон (12) управления, который ограничивает имеющийся максимальный коэффициент нагрузки с учетом массы.
[0026] 2. Традиционное воздушное судно (без обратной связи): система информирует пилота (14) о допустимом коэффициенте нагрузки. После этого пилот отвечает за маневрирование воздушного судна без превышения предельных значений, о которых он проинформирован.
[0027] Оба подхода приводят к ограниченному коэффициенту нагрузки 14, в связи с чем воздушное судно всегда эксплуатируется в пределах ограничения по коэффициенту нагрузки, который определяет диапазон E массы и центровки (фиг.1).
[0028] Однако, конкретная схема (фиг.2), использующая оценку массы, в большой степени зависит от точности используемого блока 10 оценки массы.
[0029] Из уровня техники известен расчет массы путем оценки коэффициента подъемной силы CL (который интерполируется с использованием аэродинамической базы данных воздушного судна) на основании условий полета в соответствии с уравнениями 1 и 2, приведенными ниже:
CL=f(альфа, закрылок, число Маха, руль высоты, положение стабилизатора) (уравнение 1)
Расчетная масса=Qdyn*S*CL/(nz*g), (уравнение 2)
где:
Qdyn - динамическое давление;
S - контрольная зона крыла воздушного судна;
nz - коэффициент продольной нагрузки воздушного судна;
g - сила тяжести.
[0030] В процессе оценки может возникнуть проблема из-за недостоверности данных в аэродинамической базе данных и погрешностей измерений угла атаки. Блоки 10 оценки массы, используемые в гражданских воздушного судах, могут иметь ошибки восприятия порядка 10%. При применении этой технологии к транспортным самолетам схема становится более сложной, когда необходимо выполнять задачи, чувствительные к изменению нагрузки, такие как сбрасывание грузов или пожаротушение.
[0031] Было бы желательным преодолеть трудности в оценке массы воздушного судна за счет выполнения альтернативного способа выработки коэффициента ограничения нагрузки, который показан на фиг.1, который не зависит от блоков оценки массы. Однако процесс оценки точной массы является дорогостоящим и сложным. Таким образом, простая реализация не позволяет достичь уровней точности, необходимых для обеспечения адекватной защиты конструкции.
[0032] Примерная неограничивающая технология, описанная в данном документе, представляет собой функциональные возможности, которые ограничивают максимальную подъемную силу, которую может создавать воздушное судно. Эти функциональные возможности ограничивают максимальный коэффициент нагрузки, достигаемый воздушным судном, в зависимости от массы (без необходимости в ее оценке), соблюдая максимальную подъемную силу, для которой рассчитана конструкция крыла. Функциональные возможности также позволяют добавить другие функции для более эффективного уменьшения нагрузок, так как управляемый параметр представляет более точно явления, для которых рассчитаны конструкции.
[0033] Настоящая методология применима, например, в случаях, где прочностное ограничение в основном обусловлено максимальной подъемной силой, создаваемой крылом воздушного судна. Примерные неограничивающие способы и устройство, описанные в данном документе, ограничивают коэффициент подъемной силы крыла в зависимости от динамического давления (или скорости) для создания ограничения для максимальной подъемной силы, производимой крылом.
[0034] На фиг.3 показано, для заданной массы, примерное изменение коэффициента нагрузки в зависимости от воздушной скорости (или динамического давления). График, представленный на фиг.3(a), показывает, что для постоянного коэффициента подъемной силы крыла, подъемная сила (и, следовательно, коэффициент нагрузки) изменяется по квадратичному закону в зависимости от воздушной скорости. График 3(b) демонстрирует, что можно выработать ограничение CL (поз.50) для того, чтобы ограничить максимальную подъемную силу, создаваемую крылом (поз.52), заданным значением.
[0035] На фиг.4 показано типичное изменение максимального коэффициента подъемной силы крыла в крейсерской конфигурации в зависимости от числа Маха (безразмерная величина, представляющая собой отношение скорости потока за пределами границы к местной скорости звука). При увеличении числа Маха максимальный коэффициент подъемной силы остается постоянным до тех пор, пока воздушное судно остается в дозвуковом режиме (по существу число Маха ниже 0,3) и затем начинает уменьшаться с увеличением числа Маха.
[0036] Влияние числа Маха на максимальный коэффициент подъемной силы можно также наблюдать на фиг.5, на которой показаны такие же данные кривой, как и на фиг.4, при построении зависимости CL от эквивалентной воздушной скорости для различных высот. На фиг.5 по горизонтальной оси отложена воздушная скорость (эквивалентная воздушная скорость в узлах или "KEAS"). В показанном примере нанесенная на график воздушная скорость изменяется от 50 узлов (92,6 км/час) до 350 узлов (648,2 км/час). Различные кривые CL представляют собой различные эшелоны полета (FL), то есть конкретное барометрическое давление, выраженное в виде номинальной высоты в сотнях футов. Таким образом, кривая 70 представляет FL=10, кривая 68 представляет FL=100, кривая 66 представляет FL=200, кривая 64 представляет FL=300, и кривая 62 представляет FL=400. Как видно из этого графика, максимальный коэффициент подъемной силы CL уменьшается при увеличении воздушной скорости и также уменьшается при уменьшении давления воздуха.
[0037] При традиционной защите по углу атаки контрольные максимальные значения, разрешенные законом управления, вычисляются на основании конфигурации воздушного судна (такой как отклонение закрылков/ предкрылков, положение шасси и т.д.) и ряда параметров, которые относятся к условиям полета (таких как число Маха, условия обледенения и т.д.). Как конфигурация, так и параметры условий полета выбираются на основании значимости для явлений аэродинамического сваливания.
[0038] В одном примерном неограничивающем варианте осуществления ограничение коэффициента подъемной силы можно реализовать путем защиты по углу атаки, где контрольные максимальные значения, используемые функциональными возможностями, дополнительно ограничиваются параметрами, которые относятся к динамическому давлению, такими как эквивалентная воздушная скорость, индикаторная воздушная скорость, динамическое давление и другие комбинации.
[0039] В общем, раскрытый вариант осуществления системы защиты можно реализовать для ограничения других параметров нагрузки, относящихся к расчету прочности, таких как подъемная сила крыла и изгибающий момент крыла. Кроме того, другие соответствующие параметры, такие как масса топлива в крыльях, можно использовать для повышения летно-технических характеристик системы. Масса топлива в крыльях, в частности, имеет отношение в случае, если изгибающий момент крыла представляет собой параметр, который подлежит ограничению.
[0040] На фиг.6 накладывает поверх кривых из фиг.5 дополнительную область, которая будет защищена по подъемной силе, исходя из аэродинамических (сваливания) и прочностных ограничений для подъемной силы, создаваемой примерным крылом. Максимальное значение угла атаки, используемое в законе управления защитой по углу атаки, должно быть меньшим из этих двух ограничений. Другими словами, автоматическая система управления согласно примерным неограничивающим реализациям может управлять углом атаки, который будет меньше значения, необходимого для защиты по углу атаки, и значения, необходимого для защиты максимальной подъемной силы.
[0041] Конструкция одной примерной неограничивающей реализации методологии является аналогичной защите от сваливания. Различие состоит в использовании любой комбинации параметров, которая позволяет вычислить динамическое давление условия полета для того, чтобы обеспечить защиту максимальной подъемной силы (Lmax).
[0042] На фиг.7 показан пример, где защита Lmax реализована путем добавления индикаторной воздушной скорости в таблице максимальных значений Угла атаки (AOA). Как показано на фиг.7, типичная традиционная защита по AOA базируется на зависимости конфигурации воздушного судна (такой как отклонение закрылков/ предкрылков, положение шасси и т.д.) и ряда параметров, которые относятся к условиям полета (таких как число Маха, условие обледенения и т.д.). В показанном примере дополнительный коэффициент KCAS (индикаторная воздушная скорость в узлах) вводится для того, чтобы обеспечить защиту максимальной подъемной силы. Путем реализации ограничения угла атаки в зависимости от эквивалентной воздушной скорости в законе управления можно достичь результатов, показанных на фиг.7(a) и 8.
[0043] На фиг.7(a) более подробно показаны примерные области действия защиты от сваливания и защиты Lmax на основании повышенной защиты по AOA, которая учитывает максимальную подъемную силу. В этом примере определена Lmax, и максимальный коэффициент Nz нагрузки автоматически устанавливается в зависимости от массы воздушного судна (то есть выполняется равенство Nz=L/W). На фиг.8 показаны примерные результаты максимального коэффициента Nz нагрузки в зависимости от массы воздушного судна (в килограммах).
[0044] Таким образом, примерные неограничивающие варианты осуществления используют блок оценки массы, который позволяет оценить CL в различных условиях полета. В результате этого блок оценки массы подвержен ошибкам аэродинамической базы данных во всех этих условиях. Таким образом, защита Lmax зависит от точности базы данных в меньшем диапазоне и может быть откалибрована с помощью данных летных испытаний. Пример: построение зависимости границы альфа (AOA) от KEAS (эквивалентной воздушной скорости) путем выполнения разворотов с разгоном, тем самым охватывая скорость, представляющую интерес, для трех различных высот.
[0045] В некоторых примерных неограничивающих вариантах осуществления защита Lmax подвержена ошибкам в показаниях альфа в условиях высокого значения альфа, где относительная ошибка становится ниже. Кроме того, наклон кривой подъемной силы обычно уменьшается при высоком угле атаки; это уменьшается, что также способствует снижению влияния ошибок в показаниях альфа. Процесс, выполняемый блоком оценки массы, должен иметь дело с условиями, где угол атаки является маленьким, что делает показания датчика альфа относительно большими. Эти эффекты можно увидеть, например, на фиг.9, на которой показано, как повышенный угол атаки может уменьшить наклон кривой максимальной подъемной силы для данного Δα (изменения угла атаки).
[0046] Примерная неограничивающая реализация
[0047] Примерные иллюстративные неограничивающие реализации, описанные в данном документе, относятся к системам, устройствам и способам, которые подлежат применению в летательном аппарате, оснащенным управлением по тангажу, таким как рули высоты и инцептор пилота, такой как боковая ручка управления или штурвальная колонка. На фиг.10 показано примерное иллюстративное воздушное судно. Самолет имеет набор крыльев 113, оснащенных интерцепторами 112 и закрылками 116, которые управляют подъемной силой крыла. Интерцепторы 112 помогают изменять подъемную силу, лобовое сопротивление и крен крыла, и закрылки 116 помогают изменять подъемную силу и лобовое сопротивление крыла. Хвост самолета также оснащен горизонтальным стабилизатором 117, снабженным рулем высоты 115, который управляет ориентацией по тангажу воздушного судна в полете.
[0048] На фиг.11 показана примерная иллюстративная неограничивающая система управления полетом. Эта примерная система управления полетом принимает входные сигналы положения из команды (p) инцептора 202 пилота. Термин "инцептор пилота" включает в себя множество устройств, используемых в авиационной промышленности для обеспечения взаимодействия с летчиком, например, штурвальные колонки, миниатюрные штурвальные колонки, ручки управления, боковые ручки управления и т.п.
[0049] Кроме того, примерная иллюстративная неограничивающая система принимает сигналы от датчиков 218, 219, 220, 221, 222. В этой примерной реализации датчики обеспечивают: угол атаки (α), скорость изменения угла атаки ( ), воздушную скорость (u), скорость изменения воздушной скорости (
), воздушную скорость (u), скорость изменения воздушной скорости ( ), положение закрылка (δF), положение шасси (δG), положение по тангажу (θ), скорость изменения тангажа (q), высоту над поверхностью земли (
), положение закрылка (δF), положение шасси (δG), положение по тангажу (θ), скорость изменения тангажа (q), высоту над поверхностью земли ( ), признак обнаружения обледенения (
), признак обнаружения обледенения ( ), положение сектора газа двигателя (
), положение сектора газа двигателя ( ), число Маха (Mach) и высоту над уровнем моря (h), также возможны и другие датчики. Например, барометрическое давление воздуха можно измерить с помощью приемника воздушного давления или другого датчика, предназначенного для определения динамического давления воздуха, как описано выше.
), число Маха (Mach) и высоту над уровнем моря (h), также возможны и другие датчики. Например, барометрическое давление воздуха можно измерить с помощью приемника воздушного давления или другого датчика, предназначенного для определения динамического давления воздуха, как описано выше.
[0050] Согласно этой примерной реализации информация поступает через средство передачи многочисленных данных, например, по шине 205. Все данные, то есть команды пилота и датчики, посылаются в процессор 204, который выполнен с возможностью вычисления выходного сигнала, основываясь, например, на программируемом коде. Процессор 204 выполнен с возможностью вычислять, например, команду на руль высоты на основании принятых входных данных. Эта команда отправляется в механизм для приведения в действие поверхности 207 управления полетом с целью управления или ограничения подъемной силы. В результате, поверхности управления разворачиваются в соответствии с командой, вычисленной процессором 204.
[0051] На фиг.12 показаны основные блоки примерного иллюстративного неограничивающего программного обеспечения, которые осуществляют функцию обработки в системе управления полетом. Блок 305 команд пилота представляет положение инцептора пилота, которое отправляется непосредственно на поверхность управления, которая управляет подъемной силой. Как описано выше, закон управления в примерной неограничивающей реализации ограничивает коэффициент подъемной силы крыла в зависимости от динамического давления (или скорости) для создания ограничения для максимальной подъемной силы, производимой крылом.
[0052] В примерной иллюстративной неограничивающей реализации команда с инцептора пилота преобразуется в команду альфа (α) и/или команду угла (θ) тангажа в случае, когда защиты являются активными. Зависимость между переменной, которая подлежит управлению (α или θ), и командой пилота изображена в виде формирования командного сигнала 308. Выходной сигнал формирования командного сигнала ( ) используется в качестве опорного для манипулирования рулями высоты, чтобы отслеживать переменные α или θ. Когда пилот перемещает инцептор до упора (то есть до механического предела инцептора), формирование командного сигнала производит максимум α или θ для того, чтобы не дать возможности воздушному судну превысить максимально допустимое значение α или θ для текущей конфигурации воздушного судна.
) используется в качестве опорного для манипулирования рулями высоты, чтобы отслеживать переменные α или θ. Когда пилот перемещает инцептор до упора (то есть до механического предела инцептора), формирование командного сигнала производит максимум α или θ для того, чтобы не дать возможности воздушному судну превысить максимально допустимое значение α или θ для текущей конфигурации воздушного судна.
[0053] Закон управления рассчитывается с использованием положений по тангажу динамики 307 воздушного судна, которые подаются обратно в систему, действующую по закону управления с обратной связью. Воздушная скорость (u), скорость изменения тангажа (q), угол тангажа (θ) и угол атаки (α) умножаются на коэффициенты усиления, обозначенные как 301, 302, 303, 304, соответственно. Команда упреждения производится на основании коэффициента 309 усиления упреждения, умноженного на опорное значение, выработанное с помощью выходного сигнала 308 формирования команды.
[0054] Ошибка ( ) вычисляется в виде разности между опорным значением и углом атаки или углом тангажа. Угол атаки используется в случае, когда задействованы защиты от сваливания, малой скорости и/или бафтинга. Угол (
) вычисляется в виде разности между опорным значением и углом атаки или углом тангажа. Угол атаки используется в случае, когда задействованы защиты от сваливания, малой скорости и/или бафтинга. Угол ( ) тангажа используется в случае, когда задействована защита от высокого пространственного положения. Интеграл ошибки (
) тангажа используется в случае, когда задействована защита от высокого пространственного положения. Интеграл ошибки ( ) умножается на интегральный коэффициент усиления для того, чтобы получить интегральную команду.
) умножается на интегральный коэффициент усиления для того, чтобы получить интегральную команду.
[0055] Значения коэффициентов усиления зависят от того, какая защита является активной. Например, когда активной является защита от малой скорости, коэффициент 303 усиления угла тангажа и коэффициент 301 усиления для истинной воздушной скорости увеличиваются по сравнению с коэффициентом 303 усиления для угла тангажа и коэффициентом 301 усиления для истинной воздушной скорости, которые используется в функции защиты от сваливания. Кроме того, коэффициенты усиления планируются в соответствии с числом Маха и высотой над уровнем моря во время полета воздушного судна, когда задействована защита.
[0056] Фиг.13 иллюстрирует обработку данных согласно одной примерной иллюстративной реализации, которая обеспечивает правильное взаимодействие и переключение коэффициентов усиления примерного варианта системы управления полетом в соответствии с условиями полета.
[0057] Хотя изобретение было описано в связи с тем, что в настоящее время рассматривается как наиболее практичные и предпочтительные варианты осуществления, следует понимать, что изобретение не ограничивается раскрытыми вариантами осуществления, а напротив, предназначено для охвата различных модификаций и эквивалентных компоновок, включенных в сущность и объем прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| Водно-воздушное транспортное средство | 2021 |
|
RU2785913C2 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СИСТЕМА И СПОСОБ ОЦЕНКИ ВОЗДУШНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОСНОВАНИИ МОДЕЛИ НАКОПЛЕНИЯ ДАННЫХ О ПОГОДЕ. | 2018 |
|
RU2755843C2 |
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛЕТОМ, УПРАВЛЯЮЩАЯ РУЛЯМИ ВЫСОТЫ ВОЗДУШНОГО СУДНА | 2005 |
|
RU2335007C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2008 |
|
RU2435707C2 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
| ЭКРАНОПЛАН | 2016 |
|
RU2651530C1 |
| СИСТЕМА ПОДВОДНАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ ТРАНСФОРМИРУЕМАЯ | 2019 |
|
RU2725567C1 |
| ПРОТИВОКОРАБЕЛЬНЫЙ АВИАЦИОННО-УДАРНЫЙ КОМПЛЕКС | 2020 |
|
RU2749162C1 |
Группа изобретений относится к системе, способу автоматической защиты полета и способу защиты параметра конструкции воздушного судна. Система содержит датчик динамического давления, процессор, поверхность управления для выполнения ограничения коэффициента подъемной силы крыла. Для защиты параметра конструкции воздушного судна используют максимально допустимые значения угла атаки в зависимости от динамического давления. Для автоматической защиты полета определяют или получают динамическое давление или скорость воздушного судна, с помощью процессора на основании динамического давления производят автоматическое ограничение коэффициента подъемной силы крыла. Обеспечивается автоматическое управление подъемной силой крыла для управления полетом. 2 н. и 17 з.п. ф-лы, 13 ил.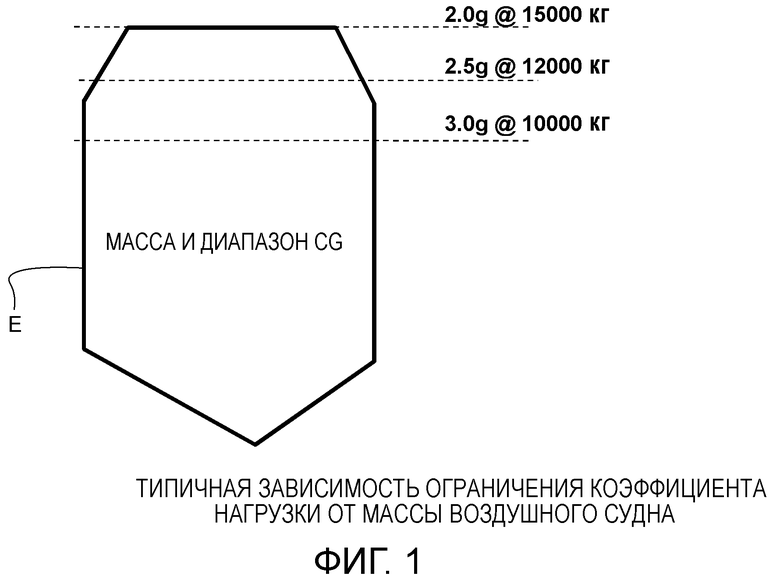
1. Система автоматической защиты полета, содержащая:
датчик, выполненный с возможностью обеспечения определения или получения динамического давления и/или скорости воздушного судна;
процессор, соединенный с датчиком, причем процессор выполнен с возможностью ограничения коэффициента подъемной силы крыла в зависимости от динамического давления и/или скорости воздушного судна для того, чтобы создать ограничение для параметра нагрузки, относящегося к расчету прочности воздушного судна; и
по меньшей мере одну поверхность управления воздушного судна, соединенную с процессором, причем упомянутая по меньшей мере одна поверхность управления воздушного судна управляет воздушным судном в соответствии с ограничением по параметру нагрузки, относящемуся к расчету прочности воздушного судна, посредством ввода сигналов положения из инцептора пилота.
2. Система по п.1, в которой параметр нагрузки, относящийся к расчету прочности, представляет собой максимальную подъемную силу, создаваемую крылом воздушного судна.
3. Система по п.1, в которой параметр нагрузки, относящийся к расчету прочности, представляет собой максимальный изгибающий момент, создаваемый крылом воздушного судна.
4. Система по п.1, в которой процессор ограничивает параметр нагрузки, относящийся к расчету прочности, на основании эквивалентной воздушной скорости.
5. Система по п.1, в которой процессор ограничивает параметр нагрузки, относящийся к расчету прочности, на основании индикаторной воздушной скорости.
6. Система по п.1, в которой процессор ограничивает параметр нагрузки, относящийся к расчету прочности, на основании массы топлива в крыльях.
7. Система по п.1, в которой процессор ограничивает параметр нагрузки, относящийся к расчету прочности, на основании числа Маха и барометрической высоты.
8. Система по п.1, в которой процессор ограничивает параметр нагрузки, относящийся к расчету прочности, на основании барометрической высоты.
9. Система по п.1, в которой процессор принудительно ограничивает параметр нагрузки, относящийся к расчету прочности, на основании коэффициента подъемной силы и воздушной скорости.
10. Система по п.1, в которой процессор принудительно устанавливает защиту по максимальной подъемной силе на основании автоматически установленного коэффициента нагрузки в зависимости от массы воздушного судна.
11. Система по п.1, в которой процессор выполнен с возможностью уменьшения чувствительности к ошибкам угла атаки.
12. Система по п.1, в которой процессор хранит таблицы управления углами атаки, которые также зависят от динамического давления или комбинации параметров, которые позволяют вычислить динамическое давление.
13. Способ автоматической защиты полета для воздушного судна, содержащий этапы, на которых:
определяют или получают динамическое давление и/или скорость воздушного судна;
используют процессор для автоматического ограничения коэффициента подъемной силы крыла в зависимости от определенного или полученного динамического давления и/или скорости воздушного судна для создания ограничения для параметра нагрузки, относящегося к расчету прочности воздушного судна;
причем процессор осуществляет автоматическое управление по меньшей мере одной поверхностью управления воздушного судна в соответствии с ограничением по параметру нагрузки посредством ввода сигналов положения из инцептора пилота.
14. Способ по п.13, в котором параметр нагрузки, относящийся к расчету прочности, выбирается из группы, состоящей из: (a) максимальной подъемной силы, создаваемой крылом воздушного судна, и (b) максимального изгибающего момента, создаваемого крылом воздушного судна, и ограничивается на основании по меньшей мере одного из: (c) эквивалентной воздушной скорости, (d) индикаторной воздушной скорости, (e) массы топлива в крыльях, (f) числа Маха и (g) барометрической высоты.
15. Способ по п.13, дополнительно включающий в себя этап, на котором посредством процессора принудительно устанавливают область защиты на основании коэффициента подъемной силы и воздушной скорости.
16. Способ по п.13, дополнительно включающий в себя этап, на котором посредством процессора принудительно устанавливают защиту по максимальной подъемной силе на основании автоматически установленного коэффициента нагрузки в зависимости от массы воздушного судна.
17. Способ по п.13, дополнительно включающий в себя этап, на котором посредством процессора уменьшают чувствительность к ошибкам угла атаки.
18. Способ по п.13, дополнительно включающий в себя этап, на котором сохраняют таблицы управления углами атаки, которые также зависят от динамического давления или комбинации параметров, которые позволяют вычислить динамическое давление.
19. Способ по п.13, в котором процессор использует максимально допустимые значения угла атаки в зависимости от динамического давления или комбинации параметров, которые позволяют вычислить динамическое давление.
| US 8761970 B2, 24.06.2014 | |||
| US 8214089 B2, 03.07.2012 | |||
| US 4027839 A, 07.06.1977 | |||
| Прибор для испытания образцов строительных материалов на разрыв | 1949 |
|
SU81337A1 |
| US 8606437 B2, 10.12.2013. | |||

