Область техники
{0001}
Данное изобретение относится к системе управления самолетом, самолету, программе управления самолетом и способу управления самолетом.
Уровень техники
{0002}
Обычно высотой полета самолета управляют посредством привода, соответственно перемещающего поверхности управления, например, рули высоты, элероны и рули направления в соответствии с заданным управляющим сигналом. Более конкретно, в системах управления самолетом бортовой управляющий компьютер вычисляет командный управляющий сигнал для управления углом отклонения, предназначенный для управления поверхностями управления на основе информации, получаемой от различных датчиков, например, инерциального датчика и датчика воздушных сигналов, предусмотренных на самолете, и рабочего сигнала от штурвала, например, от Y-образного штурвала, затем привод обеспечивает перемещение поверхностей управления в соответствии с командным управляющим сигналом для управления углом отклонения и, таким образом, самолет поддерживают на заданной высоте и достигается устойчивый полет.
{0003}
В документе 1 описана реконфигурируемая система управления полетом с отдельно выполненными блоком управления и блоком распределения, при этом блок управления управляет поворотом корпуса самолета, а блок распределения вычисляет управляющий задающий сигнал по сигналу углового ускорения, выданному из блока управления, и распределяет управляющий задающий сигнал для управления сигналами поверхностей управления для управления поверхностями управления, которыми необходимо управлять, и, кроме того, предусмотрен блок нелинейной коррекции, корректирующий входные и выходные значения блока управления в соответствии с динамическими условиями самолета, и, при наличии отказа или повреждения поверхности управления или подобного оборудования возможна реконфигурация, исключающая использование этой поверхности управления или обеспечивающая уменьшение пределов ее использования.
{Перечень ссылок}
{Документы}
{0004}
{Док.1}
Публикация патента Японии №3643870
Раскрытие изобретения
Техническая проблема
{0005}
Как описано в документе 1, реконфигурируемая система управления полетом при получении данных об отказе или повреждении любой поверхности управления реконфигурирует закон управления полетом путем управления углами отклонения поверхностей управления и, таким образом, обеспечивает непрерывность полета, безопасную посадку и так далее.
{0006}
С другой стороны, при невозможности продолжения полета, выполнения безопасной посадки и так далее только за счет реконфигурирования закона управления полетом, система управления выполняет переключение на закон управления полетом с совмещенным управлением поверхностями управления/тягой двигателя, управляющий полетом путем управления углами отклонения поверхностей управления и тягой двигателя и, таким образом, обеспечивает непрерывность полета, безопасность посадки и так далее.
Однако при использовании закона управления полетом с совмещенным управлением поверхностями управления/тягой реакция самолета становится более медленной, поскольку тягу используют также для управления полетом самолета. Поэтому, для продолжения управления самолетом желательно как можно дольше использовать реконфигурируемый закон управления полетом, и переключение от реконфигурируемого закона управления полетом к закону управления полетом с совмещенным управлением поверхностями управления/тягой должно быть выполнено надлежащим образом.
{0007}
Данное изобретение выполнено с учетом описанных выше обстоятельств, и его задачей является предложение системы управления самолетом, самолета, программы управления самолетом и способа управления самолетом, позволяющих соответственно осуществлять переключение с закона управления полетом путем управления углами отклонения поверхностей управления на закон управления полетом с управлением углами отклонения поверхностей управления и тягой двигателя.
Решение проблемы
{0008}
Для решения проблем система управления самолетом, самолет, программа управления самолетом и способ управления самолетом согласно данному изобретению содержат рассмотренные ниже технические решения.
{0009}
А именно, предлагаемая система управления самолетом содержит средство управления для управления полетом на основе первого закона управления. или второго закона управления, при этом первый закон управления управляет полетом путем управления углами отклонения поверхностей управления, а второй закон управления управляет полетом путем управления углами отклонения поверхностей управления и тягой двигателя, средство детектирования отказа/повреждения поверхности управления для детектирования неисправности по меньшей мере одной из поверхностей управления, вычислительное средство для вычисления углов отклонения и скоростей изменения углов отклонения, необходимых для реализации желаемых летных характеристик, на основе результатов детектирования средством детектирования отказа/неисправности поверхности управления, если средством детектирования отказа/повреждения поверхности управления детектирована неисправность поверхности(ей) управления, и средство оценки, предназначенное для оценки того, необходимо или нет выполнить переключение с первого закона управления на второй закон управления путем оценки того, превышают или нет углы отклонения или скорости изменения углов отклонения, вычисленные вычислительным средством, допустимые пределы изменения.
{0010}
Согласно данному изобретению, управление полетом самолета осуществляют на основе либо первого закона управления, управляющего полетом путем управления углами отклонения поверхностей управления, либо второго закона управления, управляющего полетом путем управления углами отклонения поверхностей управления и тягой двигателя.
{0011}
Если средство детектирования неисправности/повреждения поверхностей управления не детектирует неисправность какой-либо поверхности управления, управление самолетом выполняют на основе первого закона управления.
При этом, поскольку второй закон управления предусматривает также использование тяги двигателя для управления полетом, реакция самолета при втором законе управления будет медленнее, чем при первом законе управления.
{0012}
Если средство детектирования отказа/повреждения поверхности управления детектирует неисправность поверхности управления, вычислительное средство вычисляет углы отклонения и скорости изменения углов отклонения, необходимые для реализации желаемых летных характеристик, на основе результатов детектирования неисправности средством детектирования отказа/повреждения поверхности управления.
Затем средство оценки производит оценку того, превышают ли углы отклонения или скорости изменения углов отклонения, вычисленные вычислительным средством, допустимые пределы изменения, таким образом оценивая необходимость переключения с первого закона управления на второй закон управления.
{0013}
Таким образом, согласно данному изобретению, необходимость переключения с первого закона управления на второй закон управления оценивают исходя из углов отклонения и скоростей изменения углов отклонения поверхностей управления и осуществляют переключение закона управления надлежащим образом.
{0014}
Более того, в системе управления самолетом согласно первому аспекту данного изобретения при детектировании неисправности поверхности(ей) управления средством детектирования отказа/повреждения поверхности управления, если углы отклонения или скорости изменения углов отклонения, вычисленные вычислительным средством, не превышают допустимых пределов изменения, средство управления реконфигурирует первый закон управления так, чтобы исключить использование поверхности(ей) управления, неисправность которой(ых) детектирована средством детектирования, или так, чтобы или уменьшить пределы использования поверхности(ей) управления, а если углы отклонения или скорости изменения углов отклонения, вычисленные вычислительным средством, выходят за допустимые пределы изменения, то средство управления обеспечивает переключение с первого закона управления на второй закон управления.
{0015}
Согласно первому аспекту данного изобретения, если углы отклонения или скорости изменения углов отклонения, вычисленные вычислительным средством, не превышают допустимых пределов изменения, первый закон управления реконфигурируют так, чтобы исключить использование поверхности(ей) управления, неисправность которой(ых) была детектирована, или так, чтобы уменьшить пределы использования этой (этих) поверхности(ей) управления, и, таким образом, переключение с первого закона управления на второй закон управления будет заблокировано. С другой стороны, если углы отклонения и скорости изменения углов отклонения, вычисленные вычислительным средством, превышают допустимые пределы изменения, происходит переключение закона управления корпусом самолета с первого закона управления на второй закон управления и, следовательно, переключение законов управления происходит только в том случае, если это необходимо.
{0016}
Кроме того, в системе управления самолетом согласно второму аспекту данного изобретения вычислительное средство вычисляет требуемые значения изменения момента самолета исходя из угловой скорости и углового ускорения относительно оси фюзеляжа самолета, вычисленных на основе модели откликов, отражающей кинематические характеристики самолета, и вычисляет углы отклонения и скорости изменения углов отклонения, удовлетворяющие вычисленным требуемым значениям изменения момента.
{0017}
Согласно второму аспекту данного изобретения, поскольку требуемые значения изменения момента самолета рассчитывают исходя из угловой скорости и углового ускорения относительно оси фюзеляжа самолета, вычисляемых на основе модели откликов, отражающей кинематические характеристики самолета, и вычисляет углы отклонения и скорости изменения углов отклонения, удовлетворяющие вычисленным требуемым значениям изменения момента, можно легко вычислить углы отклонения и скорости изменения углов отклонения, необходимые для реализации различных режимов, таких, как режим крена, колебаний типа «голландский шаг» и режима продольных короткопериодных колебаний.
{0018}
Кроме того, возможно также конфигурирование системы управления самолетом согласно второму аспекту данного изобретения так, чтобы вычислительное средство вычисляло требуемые значения изменения момента самолета с учетом действия гироскопического момента двигателя.
{0019}
При такой конфигурации требуемые значения изменения момента самолета вычисляют с учетом действия гироскопического момента двигателя, и поэтому возможно более точное вычисление углов отклонения и скоростей изменения углов отклонения, необходимых для реализации режима самолета.
{0020}
Самолет согласно данному изобретению содержит описанную выше систему управления.
{0021}
Согласно данному изобретению, поскольку самолет содержит описанную выше систему управления, возможно надлежащее переключение с закона управления, управляющего полетом путем управления углами отклонения поверхностей управления, на закон управления, управляющий полетом путем управления поверхностями управления и тягой двигателя.
{0022}
Более того, программа для управления самолетом согласно данному изобретению представляет собой программу управления самолетом, содержащую средство управления для управления полетом на основе первого закона управления или второго закона управления, при этом первый закон управления управляет полетом путем управления углами отклонения поверхностей управления, а второй закон управления управляет полетом путем управления углами отклонения поверхностей управления и тягой двигателя, и средство детектирования отказа/повреждения поверхности управления для детектирования неисправности по меньшей мере одной из поверхностей управления, причем программа инициирует работу компьютера в качестве вычислительного средства для вычисления углов отклонения и скоростей изменения углов отклонения, необходимых для реализации желаемых летных характеристик, на основе результата детектирования средством детектирования отказа/неисправности поверхности управления, если средством отказа/неисправности поверхности управления детектирована неисправность поверхности(ей) управления, и средство оценки для оценки того, необходимо или нет выполнить переключение с первого закона управления на второй закон управления в зависимости от того, превышают ли вычисленные вычислительным средством углы отклонения или скорости изменения углов отклонения допустимые пределы изменения.
{0023}
Согласно данному изобретению, поскольку необходимость переключения с первого закона управления на второй закон управления оценивают исходя из углов отклонения и скоростей изменения углов отклонения поверхностей управления, возможно осуществление надлежащего переключения законов управления.
{0024}
Кроме того, способ управления самолетом согласно данному изобретению представляет собой способ управления, содержащий средство управления для управления полетом на основе первого закона управления или второго закона управления, при этом первый закон управления управляет полетом путем управления углами отклонения поверхностей управления, а второй закон управления управляет полетом путем управления углами отклонения поверхностей управления и тягой двигателя, и средство детектирования отказа/повреждения поверхности управления для детектирования неисправности по меньшей мере одной из поверхностей управления, причем способ содержит первый этап вычисления углов отклонения и скоростей изменения углов отклонения, необходимых для реализации желаемых летных характеристик, на основе результата детектирования средством детектирования отказа/неисправности поверхности управления, если средством детектирования отказа/неисправности поверхности управления детектирована неисправность поверхности(ей) управления, и второй этап оценки того, необходимо или нет выполнить переключение с первого закона управления на второй закон управления путем оценки того, превышают или нет найденные на первом этапе углы отклонения или скорости изменения углов отклонения допустимые пределы изменения.
{0025}
Согласно данному изобретению, поскольку необходимость переключения с первого закона управления на второй закон управления оценивают исходя из углов отклонения и скоростей изменения углов отклонения поверхностей управления, возможно осуществление надлежащего переключения законов управления.
Полезные эффекты изобретения
{0026}
Согласно данному изобретению, достигается наилучшая характеристика выполнения надлежащего переключения с закона управления, управляющего полетом путем управления углами отклонения поверхностей управления, на закон управления, управляющий полетом путем управления углами отклонения поверхностей управления и тягой двигателя.
Краткое описание чертежей
{0027}
На фиг.1 показана блок-схема, схематически изображающая конфигурацию системы управления самолетом согласно варианту осуществления данного изобретения.
На фиг.2 показана последовательность этапов программы для оценки необходимости переключения согласно варианту осуществления данного изобретения.
На фиг.3 показана последовательность этапов программы для оценки необходимости переключения согласно модификации.
Осуществление изобретения
{0028}
Ниже система управления самолетом согласно варианту осуществления данного изобретения описана более подробно со ссылками на прилагаемые чертежи.
На фиг.1 показана блок-схема, схематически изображающая самолет 1, в котором используют систему управления согласно данному варианту осуществления изобретения. Самолет 1 содержит датчик 2, поверхности управления 3, двигатель 4, кабину 5 и систему управления 6.
{0029}
Датчик 2 содержит различные датчики, например, инерциальный датчик и датчик воздушных сигналов, и собирает различную информацию о состоянии относительно состояния корпуса самолета, например, угловую скорость, угол пространственной ориентации, ускорение, угол атаки, угол скольжения на крыло, барометрическую высоту и скорость воздушного потока корпуса, и выдает собираемую информацию о состоянии в систему управления 6.
{0030}
Поверхности управления 3 содержат руль высоты, направляющий нос самолета вверх или вниз, руль направления, изменяющий направление самолета влево или вправо, элерон, накреняющий корпус самолета влево или вправо, и средство увеличения подъемной силы (закрылок), изменяющий аэродинамический профиль основного крыла для увеличения подъема. Привод, описанный ниже, перемещает поверхности управления 3 и, таким образом, управляет высотой самолета посредством аэродинамической силы.
{0031}
Двигатель 4, который может представлять собой реактивный двигатель, приводится в действие устройством управления двигателем, описанным далее, для создания тяги как реакции на выброс с высокой скоростью газов, создаваемых при горении топлива в присутствии воздуха.
{0032}
В кабине 5 размещены приборы (не показаны), показывающие условия полета самолета 1 и, как показано на фиг.1, различные виды оборудования, позволяющие пилоту управлять самолетом 1, в том числе штурвал 10, дроссельную заслонку 11, блок отображения/предупреждения 12, переключающий блок 13.
{0033}
Для управления поверхностями управления 3 пилот воздействует на штурвал 10, и рабочий сигнал для управления поверхностями управления, формируемый штурвалом 10, управляемым пилотом, выдается в систему управления 6. Следует отметить, что в самолете 1 согласно данному варианту осуществления изобретения при осуществлении управления с использованием закона 22 управления полетом с совмещенным управлением поверхностями управления/тягой, описанного ниже, предусмотрено управление от штурвала 10 не только поверхностями управления 3, но также тягой двигателя.
{0034}
Для управления тягой двигателя пилот воздействует на дроссельную заслонку 11, и рабочий сигнал для управления тягой двигателя, генерируемый пилотом, управляемым дроссельной заслонкой 11, выдается в систему управления 6.
{0035}
Блок отображения/предупреждения 12 выдает пилоту заранее установленное предупреждение на основе информации из системы управления 6 путем включения заданной сигнальной лампы, звукового сигнала (голосом, зуммером или подобным образом) или путем отображения на дисплее (не показан), установленном в кабине 5. В данном варианте осуществления, особенно при неисправности любой поверхности управления 3 вследствие ее повреждения и необходимости переключения с закона 20 управления полетом на закон 22 с совмещенным управлением поверхностями управления/тягой (подробности описаны далее), блок отображения/предупреждения 12 информирует пилота о результате.
{0036}
Переключающий блок 13 выдает переключающий командный сигнал для переключения закона 20 управления полетом и закона 22 управления полетом с совмещенным управлением поверхностями управления/тягой в систему управления 6, и переключающий командный сигнал выдается в систему управления 6 на основе воздействия пилота.
{0037}
Система управления 6 содержит компьютер 15 для расчета заданного управляющего сигнала, привод 16, перемещающий поверхности управления 3 на основе управляющего сигнала, выдаваемого компьютером 15, устройство 17, приводящее в действие двигатель 4 также на основе управляющего сигнала, выдаваемого компьютером 15, и устройство 18 детектирования отказа/повреждения поверхностей управления, детектирующее рабочее состояние поверхностей управления.
{0038}
Компьютер 15 рассчитывает командный управляющий сигнал для управления углом отклонения и командный управляющий сигнал для управления тягой и содержит закон 20 управления полетом, закон 22 управления полетом с совмещенным управлением поверхностями управления/тягой, коммутирующий блок 19 для переключения между данными двумя законами, и блок 24 оценки необходимости переключения, оценивающий необходимость переключения.
{0039}
Закон 20 управления полетом представляет собой закон управления, обеспечивающий полет самолета 1 в автоматическом режиме или ручном режиме под управлением пилота в состоянии, когда самолет 1 нормально летит с нормально работающим оборудованием, например, с поверхностями управления 3, и обеспечивающий управление полетом путем управления углами отклонения поверхностей управления 3.
{0040}
В состоянии, в котором самолетом управляют в соответствии с законом 20 управления полетом, для управления, в частности, высотой самолета 1 компьютер 15 генерирует командные управляющие сигналы для управления углом отклонения на основе рабочего сигнала, поступающего от пилота через штурвал 10, и информации о состоянии от датчика 2. Каждый генерируемый командный управляющий сигнал для управления углом отклонения выдается на привод 16, и привод 16 перемещает поверхности управления 3 в соответствии с командным управляющим сигналом для управления углом отклонения, тем самым изменяя или поддерживая высоту самолета 1.
{0041}
Следует отметить, что по результатам детектирования, осуществляемого устройством 18 детектирования отказа/повреждения поверхностей управления, закон 20 управления полетом согласно данному варианту осуществления изобретения может осуществлять реконфигурирование сигнала так, чтобы распределять управляющие задающие сигналы на нормально работающие поверхности управления 3 с тем, чтобы не использовать неисправную поверхность управления 3 или уменьшить пределы использования неисправной поверхности управления 3.
{0042}
Закон 22 управления полетом с совмещенным управлением поверхностями управления/тягой представляет собой закон управления, обеспечивающий полет самолета 1 в автоматическом режиме или ручном режиме под управлением пилота при неисправностях любой из поверхностей управления 3 самолета и управляющий полетом путем управления углами отклонения поверхностей управления 3 и тягой двигателя.
{0043}
В состоянии, когда управление самолетом 1 осуществляют на основе закона 22 управления полетом с совмещенным управлением поверхностями управления и тягой, для управления высотой самолета 1 компьютер 15 генерирует командные управляющие сигналы для управления углом отклонения и тягой на основе рабочего сигнала от пилота из штурвала 10 и информации о состоянии от датчика 2. В соответствии с законом 22 управления полетом с совмещенным управлением поверхностями управления/тягой, поскольку командный управляющий сигнал для управления тягой рассчитывается на основе рабочего сигнала и информации о состоянии, даже при управлении дроссельной заслонкой 11 компьютер 15 ограничивает ее действие и автоматически устанавливает высокий приоритет расчета командного управляющего сигнала для управления тягой на основе рабочего сигнала и информации о состоянии.
{0044}
Сгенерированный командный управляющий сигнал для управления углом отклонения выдается на привод 16, и привод 16 перемещает поверхности управления 3 в соответствии с командным управляющим сигналом для управления углом отклонения. Сгенерированный командный управляющий сигнал для управления тягой выдается в устройство 17 управления двигателем, и устройство 17 управления двигателем приводит в действие двигатель 4 в соответствии с командным управляющим сигналом для управления тягой. В результате перемещения поверхностей управления 3 в соответствии с командным управляющим сигналом для управления углом отклонения и приведения в действие двигателя 4 в соответствии с командным управляющим сигналом для управления тягой происходит управление углами отклонения и тягой двигателя, и высота самолета 1 соответственно изменяется или поддерживается на заданном уровне.
{0045}
Следует отметить, что в цепи прохождения командного управляющего сигнала для управления углом отклонения, выдаваемого на привод 16 в соответствии с законом 22 управления полетом с совмещенным управлением поверхностями управления/тягой, предусмотрен фильтр 23 коррекции реакции, предназначенный для корректировки разности скоростей реакций двигателя 4 и поверхностей управления 3. Фильтр коррекции реакции 23 позволяет выполнять корректировку скорости реакции, например, фильтруя командный управляющий сигнал для управления углом отклонения.
{0046}
Обычно скорость реакции от момента, когда командный управляющий сигнал для управления тягой выдается для управление тягой двигателя до того, как двигатель 4 разовьет тягу в соответствии с командным управляющим сигналом для управления тягой, меньше скорости реакции от момента, когда командный управляющий сигнал для управления углами отклонения выдается на управление углами отклонения до того, как поверхности управления 3 достигают соответствующих углов отклонения на основе данного командного управляющего сигнала для управления углами отклонения. Более того, скорость реакции корпуса самолета изменяется в зависимости от того, какая часть поверхностей управления 3 неисправна. По этой причине в фильтре 23 коррекции реакции предусмотрена такая настройка, что скорость реакции поверхностей управления 3 практически равна скорости реакции двигателя 4, благодаря чему достигается одинаковая скорость реакции корпуса самолета независимо от того, какая часть поверхностей управления 3 неисправна.
{0047}
Устройство 18 детектирования отказа/повреждения поверхности управления осуществляет оценку того, правильно ли работают поверхности управления 3, на основе информации о состоянии самолета 1, получаемой от датчика 2, детектирует неисправность, если какая-либо или все поверхности управления 3 неработоспособны или повреждены, и в таком случае выдает сигнал неисправности и аэродинамические коэффициенты в блок 24 оценки необходимости переключения.
{0048}
Ниже приведено описание вычисления аэродинамического коэффициента, выполняемого устройством 18 детектирования отказа/повреждения поверхности управления. Устройство 18 детектирования отказа/повреждения поверхности управления содержит блок вычисления возможной величины и блок оценочного определения аэродинамического коэффициента.
{0049}
Блок вычисления возможной величины в устройстве 18 детектирования отказа/повреждения поверхности управления содержит по меньшей мере любые два из следующих устройств: вычислительное устройство с алгоритмом на основе обобщенного калмановского фильтра, вычислительное устройство с алгоритмом на основе нечуткого калмановского фильтра, вычислительное устройство с алгоритмом на основе метода регрессии для преобразования Фурье и вычислительное устройство с алгоритмом на основе технологии нейронных сетей, при этом вычислительные устройства адаптированы для индивидуального вычисления возможной величины для оценки аэродинамических коэффициентов, получаемых на основании информации датчика, что описано далее, на основе соответствующих встроенных алгоритмов. Здесь вычисление возможной величины вычислительными устройствами не ограничен вычислением на основе алгоритмов для рассмотренных выше четырех методик оценки, и возможно, например, применение алгоритмов для других методик оценки, например, применение фильтра на основе фракционного фильтра.
Следует отметить, что автором настоящего изобретения уже были опубликованы специальные операционные выражения и так далее на основе методов для вычисления возможных величин посредством описанных выше вычислительных устройств, например, на симпозиуме, организованном японским обществом аэронавтики и космических наук (регистрационный номер JSASS-2009-5057), и они известны, поэтому их дальнейшее описание здесь не приведено.
{0050}
Блок оценочного определения аэродинамического коэффициента определяет оценку аэродинамического коэффициента из множества возможных величин, вычисленных в блоке вычисления возможных величин. В частности, производится вычисление средней или медианной величины из возможных величин, и вычисленная средняя или медианная величина в конечном счете определяется как оценка аэродинамического коэффициента. Кроме того, возможен также расчет воспроизведенных величин по информации датчика согласно возможным величинам, соответственно, используя возможные величины, и сравнение воспроизведенных величин с информацией датчика, таким образом, определяя возможную величину, соответствующую воспроизведенной величине, которая совпадает или близка к информации датчика, в качестве оценки аэродинамического коэффициента.
{0051}
Более конкретно, при вычислении аэродинамических коэффициентов устройство 18 детектирования отказа/повреждения поверхности управления, во-первых, генерирует командный сигнал для управления углом отклонения, под действием которого происходит перемещение поверхности управления 3, обеспечивающее перемещение корпуса самолета в определенных пределах с тем, чтобы оценить аэродинамические коэффициенты, и выдает сгенерированный командный сигнал для управления углом отклонения в компьютер 15. Компьютер 15 генерирует командный сигнал для управления углом отклонения для изменения или поддержания желаемой высоты корпуса самолета, накладывает командный сигнал для управления углом отклонения, сгенерированный устройством 18 детектирования отказа/повреждения поверхности управления, на данный командный сигнал для управления углом отклонения и выдает результирующий суммарный командный сигнал для управления углом отклонения на привод 16, и привод 16 перемещает поверхности управления 3 в соответствии с командным сигналом для управления углом отклонения.
{0052}
В результате поверхности управления 3 приходят в движение, корпус самолета совершает колебательное движение, например, колебательное движение в соответствии с командным сигналом для управления углом отклонения, и соответственно происходит изменение параметров, характеризующих кинетическое состояние корпуса самолета, которые постоянно или периодически получает датчик 2. Датчик 2 детектирует результирующие параметры кинетического состояния как информацию датчика и выдает информацию датчика на устройство 18 детектирования отказа/повреждения поверхности управления.
{0053}
Далее вычислительные устройства блока вычисления возможной величины отдельно рассчитывают возможные величины на основе информации датчика, детектированной датчиком 2, и блок вычисления возможной величины выдает результаты расчетов в блок оценочного определения аэродинамического коэффициента. Затем блок оценочного определения аэродинамического коэффициента определяет окончательную оценку аэродинамического коэффициента на основе возможных величин, полученных из блока вычисления возможной величины, и выдает определенные оценки аэродинамического коэффициента в блок 24 оценки необходимости переключения.
{0054}
Коммутирующий блок 19 осуществляет переключение между законом 20 управления полетом и законом 22 управления полетом с совмещенным управлением поверхностями управления/тягой в зависимости от ситуации под действием переключающего командного сигнала, поступающего от переключающего блока 13 на основе команды пилота в зависимости от состояния самолета 1.
{0055}
На основе результатов детектирования устройством 18 детектирования отказа/повреждения поверхности управления блок 24 оценки необходимости переключения выполняет оценку необходимости переключения для оценки того, необходимо или нет выполнить переключение с закона 20 управления полетом на закон 22 управления полетом с совмещенным управлением поверхностями управления/тягой.
Следует отметить, что запоминающий блок 25 представляет собой полупроводниковую память или магнитную память и хранит различные типы данных (аэродинамическую базу данных, относящихся к самолету 1, базу данных спецификаций корпуса самолета 1 и так далее), которые требуются для выполнения оценки необходимости переключения.
{0056}
Ниже описаны эффекты, обеспечиваемые системой управления самолетом, сконфигурированной таким образом.
{0057}
При отсутствии неисправностей оборудования, например, поверхностей управления 3 самолета 1 согласно данному изобретению, самолет 1 летит под управлением на основе закона 20 управления полетом. Если во время полета устройство 18 детектирования отказа/повреждения поверхности управления детектирует неисправность по меньшей мере одной из поверхностей управления 3, вызванную какой-либо причиной, например, поломкой, блок 24 оценки необходимости переключения производит оценку необходимости переключения.
{0058}
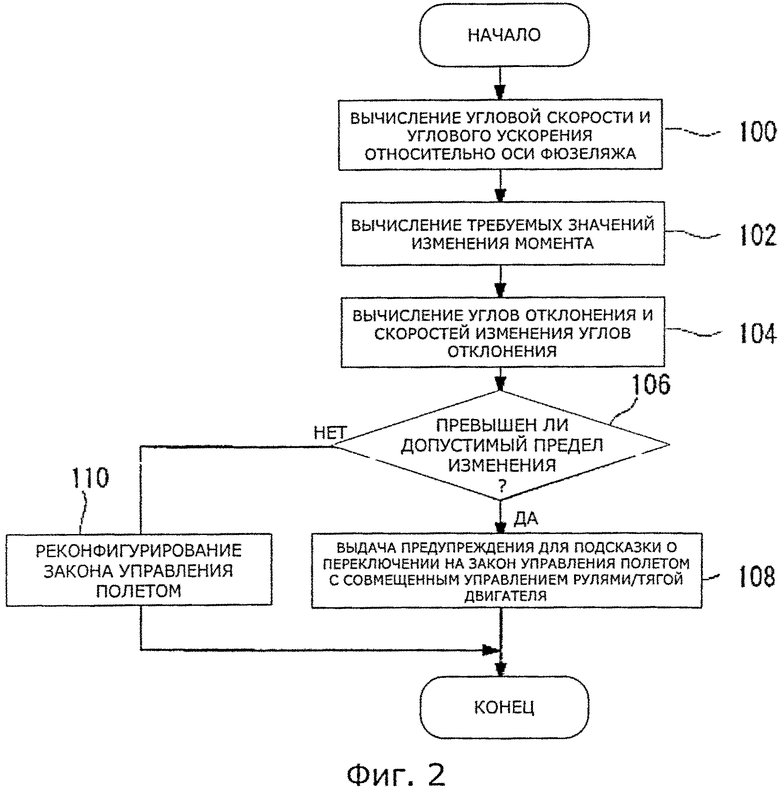
На фиг.2 показана последовательность этапов программы для оценки необходимости переключения законов управления, причем программу выполняет блок 24 оценки необходимости переключения. Программа для оценки необходимости переключения хранится в запоминающем блоке 25.
{0059}
Следует отметить, что в следующем описании в качестве примера рассмотрены этапы обработки применительно к режиму крена самолета 1. В таблице 1 даны пояснения символов, используемых в приведенных ниже формулах.
устойчивость)
{0060}
Следует отметить, что балансированный угол атаки αt, балансированная скорость v, плотность воздуха ρ при полете на балансировочном режиме и другую информацию получают от датчика 2 или из базы данных результатов ранее выполненного вычисления балансировки, причем база данных хранится в запоминающем блоке 25.
Кроме того, в запоминающем блоке 25 в базе данных характеристик корпуса самолета 1 хранятся вес W корпуса, площадь поверхности S, моменты инерции IXX, IYY, IZZ, центробежный момент инерции IZX.
Более того, в запоминающем блоке 25 в виде аэродинамической базы данных также хранятся аэродинамические коэффициенты.
{0061}
На этапе 100 вычисляют угловую скорость и угловое ускорение относительно оси фюзеляжа самолета 1 на основе модели откликов, показывающей кинематические характеристики (режим) самолета 1.
{0062}
Идеальное движение по крену (угловая скорость крена р*) относительно устойчивой оси самолета 1 и рыскание (угловая скорость рыскания r*), сопутствующее такому движению по крену, соответственно выражаются передаточной функцией, представленной формулой (1), и их отношением, представленным формулой (2).
Следует отметить, что в формуле (2) возможно использование приближенных значений: cosθw=1 и φw=P*/s (р*, деленное на "s").
{0063}
Соответственно угловая скорость относительно оси фюзеляжа определяется формулой (3), а угловое ускорение относительно оси фюзеляжа определяется формулой (4). Угловая скорость и угловое ускорение относительно оси фюзеляжа вычисляют путем подстановки, например, минимально необходимой величины летной характеристики (постоянной времени тR режима крена) и формулы (2) в формулу (3) и формулу (4). Следует отметить, что минимально необходимые величины летной характеристики хранятся в запоминающем блоке 25.
Заметим, что 
{0064}
На следующем этапе 102 вычисляют требуемые значения изменения момента на основе нелинейных уравнений движения в связи с поворотом самолета 1.
{0065}
Нелинейные уравнения движения в связи с поворотом самолета 1 представлены формулой (5), где L, М, и N - внешние усилия.
Заметим, что поскольку q=0 и 
{0066}
{0067}
Более того, внешние усилия L, М и N могут быть выражены формулой (7), в которую входят размерные аэродинамические коэффициенты.
{0068}
Следует отметить, что формула (7) может быть выражена с помощью формулы (8), так как при идеальном движении по крену, поскольку u=α=q=β=0.
{0069}
Теперь требуемые значения изменения момента, выраженные формулой (9), получают из формул (6) и (8).
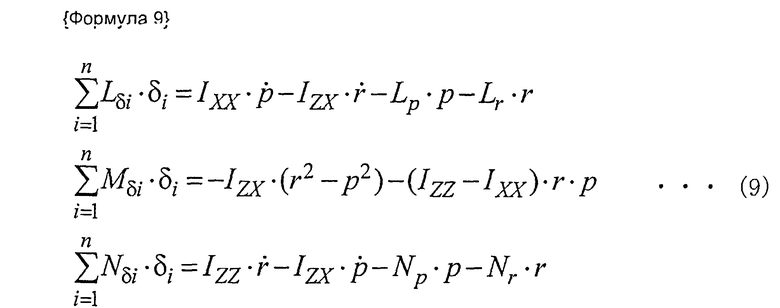
{0070}
На следующем этапе 104 вычисляют углы отклонения и скорости изменения углов отклонения.
{0071}
Во-первых, формулу (9) записывают в матричной форме и, таким образом, получают формулу (10).
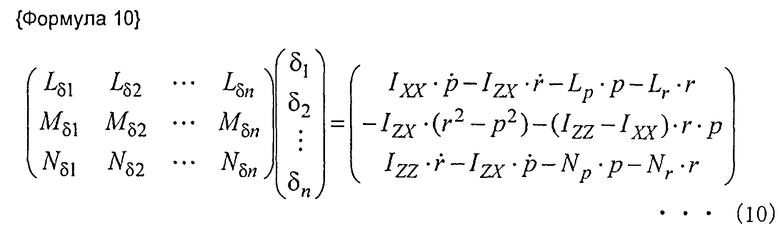
{0072}
Здесь, как показано в формуле (11), матрица, содержащаяся в левой части формулы (10), определяется как матрица эффективности управления В, а матрица, содержащаяся в правой части формулы (10), обозначена как F, и, таким образом, для вычисления углов отклонения получают формулу (12).
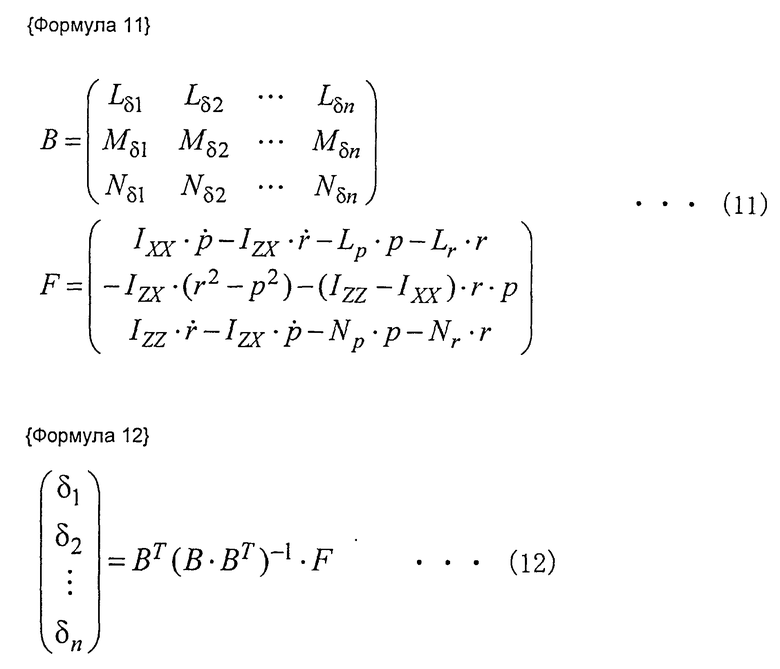
Следует отметить, что BT(В·BT)-1 в левой части формулы (12) представляет оптимальный закон распределения углов отклонения.
{0073}
Затем, на этапе 104, изменения во времени угловой скорости, вычисленные по формуле (3), и углового ускорения, вычисленные по формуле (4), подставляют в формулу (12) и, таким образом, вычисляют изменение во времени реакции каждого угла отклонения.
Кроме того, на этапе 104 вычисляют скорость изменения каждого угла отклонения путем цифрового дифференцирования вычисленных изменений во времени реакций соответствующих углов отклонения.
{0074}
Следует отметить, что аэродинамические коэффициенты эффективности управления (эффективности управления креном Lδi, эффективности управления тангажом Mδi, эффективности управления рысканием Nδi), используемые в формуле (12), получают на основе результатов детектирования устройством 18 детектирования отказа/повреждения поверхности управления, а аэродинамические коэффициенты динамической устойчивости (демпфирование колебаний крена Lp, крен за счет угловой скорости рыскания Lr, продольная устойчивость Nρ, демпфирование колебаний рыскания Nr), используемые в формуле (12), получают из аэродинамической базы данных, хранящейся в запоминающем блоке 25.
{0075}
На следующем этапе 106 выполняют оценку того, превышают ли вычисленные на этапе 104 углы отклонения или скорости изменения углов отклонения допустимые пределы изменений. В случае результата оценки ДА программа переходит к этапу 108, в случае результата оценки НЕТ происходит переход к этапу 110. Иначе говоря, на этапе 106 происходит оценка того, возможно ли осуществление полета на основе минимально необходимых величин летных характеристик путем управления углами отклонения поверхностей управления 3 (закон 20 управления полетом) при наличии неисправности поверхности(ей) управления 3.
Следует отметить, что вышеупомянутые допустимые пределы изменения конкретно относятся к рабочим пределам и максимальной скорости изменения углов отклонения и определяются параметрами привода 16 для перемещения поверхностей управления 3. Параметры привода 16 и вышеупомянутые допустимые пределы изменения заранее записаны в запоминающем блоке 25.
{0076}
На этапе 108 происходит запуск блока отображения/предупреждения 12 для выдачи предупреждения с подсказкой пилоту о необходимости переключения закона 20 управления полетом на закон 22 управления полетом с совмещенным управлением поверхностями управления/тягой, и программа завершается.
{0077}
Когда блок отображения/предупреждения 12 выдает предупреждение, пилот самолета 1 узнает о неисправности поверхности(ей) управления 3. Поэтому, пилот управляет переключающим блоком 13 для переключения с закона 20 управления полетом на закон 22 управления полетам с совмещенным управлением поверхностями управления/тягой. В ответ на это действие переключающий блок 13 выдает переключающий командный сигнал. Компьютер 15 приводит в действие коммутирующий блок 19 на основе переключающего командного сигнала, тем самым переключая закон управления для самолета 1 с закона 20 управления полетом на закон 22 управления полетом с совмещенным управлением поверхностями управления/тягой так, что управление самолетом 1 происходит на основе закона 22 управления полетом с совмещенным управлением поверхностями управления/тягой.
{0078}
С другой стороны, на этапе 110 проблему неисправности поверхности(ей) управления 3 решают путем реконфигурирования закона 20 управления полетом так, чтобы не использовать поверхность(и) 3 управления, неисправности которых детектированы, или уменьшить пределы их использования, и программа завершается.
Если закон 20 управления полетом реконфигурирован, система 6 управления осуществляет управление самолетом 1 на основе реконфигурированного закона 20 управления полетом.
{0079}
Система 6 управления самолетом 1 согласно данному варианту осуществления изобретения при вычислении требуемых значений изменений момента самолета 1 может также учитывать действие гироскопического момента двигателя 4. Это обеспечивает более точное вычисление углов отклонения и скоростей изменения углов отклонения, необходимых для реализации различных режимов самолета 1.
{0080}
В частности, в правую часть формулы (5) добавляют слагаемые А и В, учитывающие гироскопический момент двигателя 4.
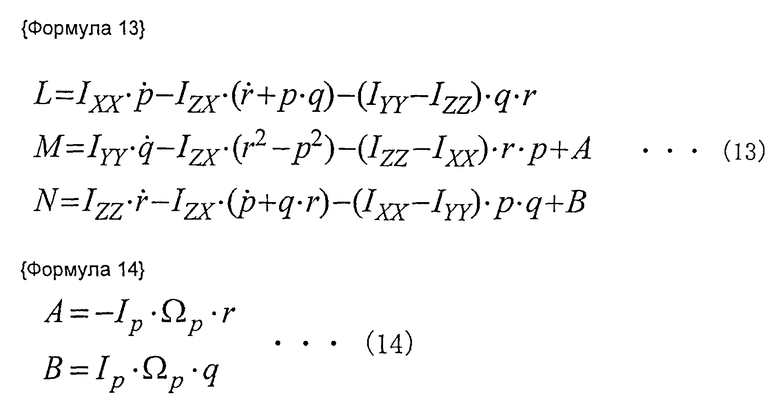
{0081}
Кроме того, если угол отклонения поверхности управления 3 неизменен вследствие отказа поверхности управления или если поверхность управления 3 повреждена, происходит изменение геометрии корпуса самолета 1. Однако невозможно заранее знать изменения аэродинамических коэффициентов, вызванные изменением геометрии корпуса. По этой причине система управления 6 самолета 1 согласно данному варианту осуществления изобретения может вычислять требуемые значения изменения момента с использованием аэродинамических коэффициентов динамической устойчивости (демпфирование колебаний крена Lp, крен за счет угловой скорости рыскания Lr, продольная устойчивость Nρ, демпфирования колебаний рыскания Nr), которые были детектированы устройством 18 детектирования отказа/повреждения поверхности управления.
{0082}
Как описано выше, система 6 управления самолетом 1 согласно данному варианту осуществления изобретения содержит компьютер 15, управляющий полетом на основе либо закона 20 управления полетом, обеспечивающим управление путем управления углами отклонения поверхностей управления 3, либо закона 22 управления полетом с совмещенным управлением поверхностями управления/тягой, обеспечивающим управления полетом путем управления углами отклонения поверхностей управления 3 и тягой двигателя, и устройство 18 детектирования отказа/повреждения поверхности управления, детектирующего неисправность по меньшей мере одной из поверхностей управления 3. Более того, если устройство 18 детектирования отказа/повреждения поверхности управления детектирует неисправность поверхности(ей) 3 управления, система 6 управления на основе результата детектирования устройства 18 детектирования отказа/повреждения поверхности управления вычисляет углы отклонения и скорости изменения углов отклонения 3, необходимые для реализации желаемых летных характеристик, и производит оценку того, не превышают ли вычисленные углы отклонения или скорости изменения углов отклонения допустимые пределы изменения, тем самым оценивая, необходимо ли переключение с закона 20 управления полетом на закон 22 управления полетом с совмещенным управлением поверхностями управления/тягой.
{0083}
Таким образом, система 6 управления самолетом 1 согласно данному варианту осуществления изобретения обеспечивает возможность надлежащего переключения с закона 20 управления полетом на закон 22 управления полетом с совмещенным управлением поверхностями управления/тягой.
{0084}
Более того, если устройство 18 детектирования отказа/повреждения поверхности управления детектирует неисправность поверхности(ей) 3 управления и если вычисленные углы отклонения или скорости изменения углов отклонения не превышают допустимые пределы изменения, система 6 управления самолетом 1 согласно данному варианту осуществления изобретения реконфигурирует закон 20 управления полетом так, чтобы не использовать поверхность(и) 3 управления, неисправность которых была обнаружена, или так, чтобы уменьшить пределы использования этой (этих) поверхности(ей) управления, и, таким образом, обеспечивается возможность блокировки переключения с закона 20 управления полетом на закон 22 управления полетом с совмещенным управлением поверхностями управления/тягой. С другой стороны, если вычисленные углы отклонения и скорости изменения углов отклонения превышают допустимые пределы изменения, происходит переключение с закона 20 управления полетом на закон 22 управления полетом с совмещенным управлением поверхностями управления/тягой, и, таким образом, переключение закона управления происходит только в том случае, если это необходимо.
{0085}
Кроме того, система 6 управления самолетом 1 согласно данному варианту осуществления изобретения вычисляет необходимые значения изменения момента самолета 1 исходя из угловой скорости и углового ускорения относительно оси фюзеляжа самолета, вычисленных на основе модели откликов, отражающей кинематические характеристики самолета, и вычисляет углы отклонения и скорости изменения углов отклонения, удовлетворяющие вычисленным требуемым значениям изменения момента. Таким образом, система 6 управления может легко вычислить углы отклонения и скорости изменения углов отклонения, необходимые для реализации различных режимом самолета, таких, как режим крена, колебаний типа «голландский шаг» и продольных короткопериодных колебаний.
{0086}
Модификация
В приведенном выше варианте осуществления изобретения в качестве примера рассмотрен процесс оценки необходимости переключения применительно к режиму крена самолета 1. Однако данное изобретение не ограничено этим, и, как в модификации, рассмотренной ниже, возможно, например, вычисление углов отклонения и скоростей изменения углов отклонения поверхностей 3 управления для других режимов, например, режима колебаний типа «голландский шаг» и режима продольных короткопериодных колебаний самолета 1 на основе передаточной функции, соответствующей каждому режиму.
{0087}
В данной модификации, например, в режиме колебаний типа «голландский шаг», углы отклонения и скорости изменения углов отклонения вычисляют путем вычисления угловой скорости и углового ускорения относительно оси фюзеляжа на основе передаточной функции, определяющей идеальную реакцию угла бокового скольжения β в режиме колебаний типа «голландский шаг». В случае продольных короткопериодных колебаний углы отклонения и скорости изменения углов отклонения вычисляют путем вычисления угловой скорости и углового ускорения относительно оси фюзеляжа на основе передаточной функции, определяющей идеальную реакцию вертикальной перегрузки и угла атаки.
{0088}
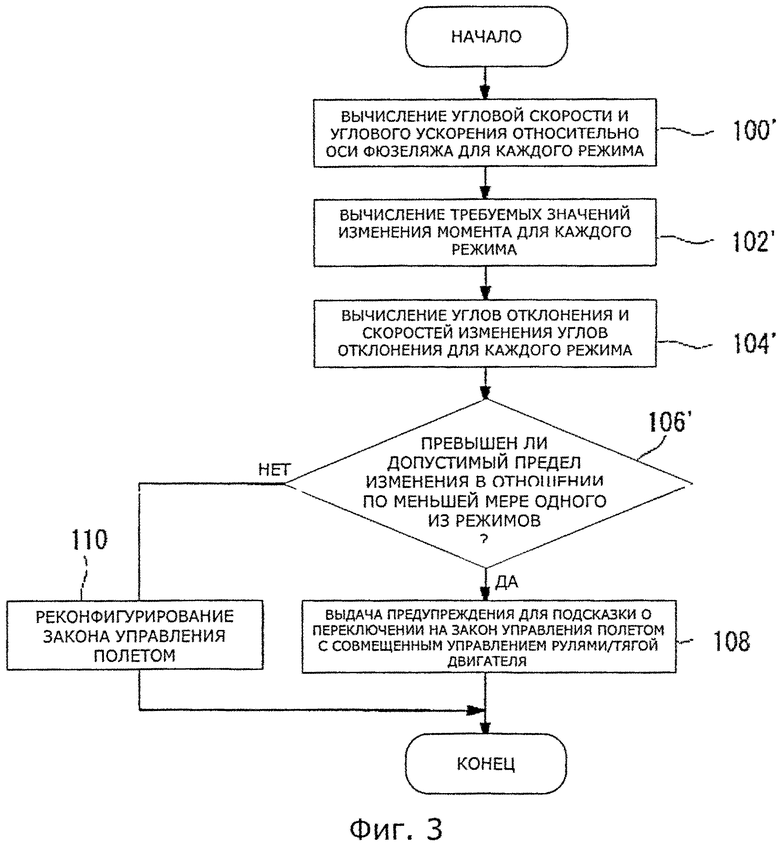
На фиг.3 показана последовательность этапов программы для оценки необходимости переключения согласно данной модификации. На фиг.3 этапы, аналогичные этапам, показанным на фиг.2, имеют те же номера позиций, как на фиг.2 с или без апострофа, добавленного в конце номера этапа, и описание этих этапов частично опущено.
{0089}
Во-первых, на этапе 100′ на основе моделей откликов соответственно отражающих режим крена, режим колебаний типа «голландский шаг» и режим продольных короткопериодных колебаний самолета 1, вычисляют для каждого режима угловую скорость и угловое ускорение относительно оси фюзеляжа самолета.
{0090}
На следующем этапе 102′ вычисляют требуемое значение изменения момента для каждого режима.
{0091}
На следующем этапе 104′ вычисляют углы отклонения и скорости изменения углов отклонения для каждого режима.
{0092}
На следующем этапе 106′ выполняют оценку того, превышают ли углы отклонения и скорости изменения углов отклонения, вычисленные на этапе 104′, по меньшей мере в одном из перечисленных режимов, а именно в режиме крена, режиме колебаний типа «голландский шаг» или в режиме продольных короткопериодных колебаний, допустимые пределы изменений, и, если ДА, то программа переходит к этапу 108, если НЕТ, то происходит переход к этапу 110.
{0093}
На этапе 108 происходит запуск блока отображения/предупреждения 12 для выдачи предупреждения с подсказкой пилоту о необходимости переключения с закона 20 управления полетом на закон 22 управления полетом с совмещенным управлением поверхностями управления/тягой, и программа завершается.
{0094}
На этапе 110 проблему неисправности поверхности(ей) 3 управления решают путем реконфигурирования закона 20 управления полетом так, чтобы не использовать поверхность(и) 3 управления, неисправности которых были обнаружены, или уменьшить пределы их использования, и программа завершается.
{0095}
Хотя данное изобретение описано применительно к конкретному варианту его осуществления, техническая область применения данного изобретения не ограничена рамками данного конкретного варианта осуществления. Возможны различные изменения и улучшения описанного выше варианта без выхода за пределы сущности изобретения, и все изменения и улучшения такого рода подразумевают, что они подпадают под объем правовой охраны данного изобретения.
{0096}
Например, в описанном выше варианте осуществления изобретения, если вычисленные углы отклонения или скорости изменения углов отклонения превышают допустимые пределы изменения, блок 12 отображения/предупреждения выдает предупреждение, и пилот получает рекомендацию перейти с закона 20 управления полетом на закон 22 управления полетом с совмещенным управлением поверхностями управления/тягой. Однако данное изобретение не ограничено этим. Например, согласно данному изобретению также возможно, что, если вычисленные углы отклонения или скорости изменения углов отклонения превышают допустимые пределы изменения, то система 6 управления автоматически переключает закон 20 управления полетом на закон управления 22 управления полетом с совмещенным управлением поверхностями управления/тягой без участия пилота в управлении переключающим блоком 13.
{0097}
Более того, порядок выполнения программ для оценки необходимости переключения, описанный выше в варианте осуществления изобретения и в модификации, также приведен только в качестве примеров, и, очевидно, возможно исключение ненужного этапа, добавление нового этапа и изменение порядка выполнения программы при сохранении сущности данного изобретения.
Перечень номеров позиций
{0098}
1 Самолет
2 Датчик
3 Поверхность управления
4 Двигатель
5 Кабина
6 Система управления
10 Штурвал
12 Блок отображения/предупреждения
13 Переключающий блок
15 Компьютер
16 Привод
17 Устройство управления двигателем
18 Устройство детектирования отказа/повреждения поверхности управления
19 Коммутирующий блок
20 Закон управления полетом
22 Закон управления полетом с совмещенным управлением поверхностями управления/тягой
23 Фильтр коррекции реакции
24 Блок оценки необходимости переключения
25 Запоминающий блок
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2537883C2 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| СПОСОБ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ САМОЛЕТА (ВАРИАНТЫ), СПОСОБ ПОЛЕТА САМОЛЕТА, БЕЗАЭРОДРОМНЫЙ ВСЕПОГОДНЫЙ САМОЛЕТ "МАКСИНИО" ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (ВАРИАНТЫ), СПОСОБ ВЗЛЕТА И СПОСОБ ПОСАДКИ, СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ В ПОЛЕТЕ, ФЮЗЕЛЯЖ, КРЫЛО (ВАРИАНТЫ), РЕВЕРС ТЯГИ И СПОСОБ ЕГО РАБОТЫ, СИСТЕМА ШАССИ, СИСТЕМА ГАЗОРАЗДЕЛЕНИЯ И ГАЗОРАСПРЕДЕЛЕНИЯ ЕГО | 2007 |
|
RU2349505C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ АЭРОДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОТКАЗА/ПОВРЕЖДЕНИЯ УПРАВЛЯЮЩЕЙ ПОВЕРХНОСТИ | 2011 |
|
RU2515947C1 |
| ЛЕГКИЙ МНОГОРЕЖИМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2007 |
|
RU2348568C1 |
Группа изобретений относится к устройству и способам управления самолетом. Самолет, оснащенный системой управления, которая содержит средство управления на основе двух законов управления, средство детектирования отказа/повреждения поверхности управления, вычислительное средство для вычисления углов и скоростей изменения углов отклонения поверхностей управления, а также для вычисления требуемых изменений моментов самолета, средство оценки необходимости выполнения переключения с одного закона управления на другой. При способе управления самолетом по первому закону управляют углами отклонения поверхностей управления, по второму закону - тягой двигателя. Производят переключение с первого закона на второй по результатам вычисления углов и скоростей изменения углов отклонения поверхностей управления с учетом результата детектирования отказа/повреждения поверхностей управления путем оценки того, превышают или нет вычисленные значения допустимые пределы измерения. Обеспечивается безопасность полета. 3 н. и 3 з.п. ф-лы, 3 ил., 1 табл.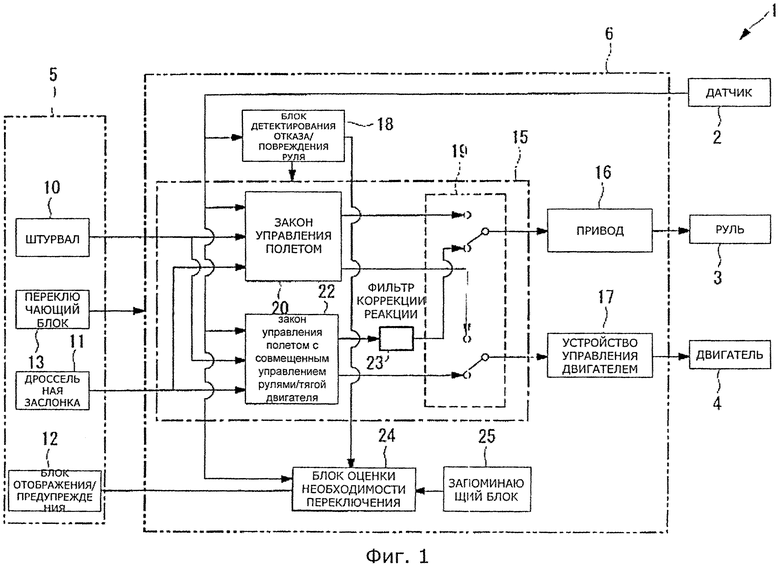
1. Система управления самолетом, содержащая:
средство управления для управления полетом на основе первого закона управления или второго закона управления, при этом первый закон управления управляет полетом путем управления углами отклонения поверхностями управления, а второй закон управления управляет полетом путем управления углами отклонения поверхностей управления и тягой двигателя;
средство детектирования отказа/повреждения поверхности управления для детектирования неисправности по меньшей мере одной из поверхностей управления;
вычислительное средство для вычисления углов отклонения и скоростей изменения углов отклонения, необходимых для реализации минимально необходимых летных характеристик, на основе результатов детектирования средством детектирования отказа/повреждения поверхности управления, если средством детектирования отказа/повреждения поверхности управления детектирована неисправность поверхности(ей) управления; и
средство оценки для оценки того, выполнить или нет переключение с первого закона управления на второй закон управления путем оценки того, превышают или нет углы отклонения или скорости изменения углов отклонения, вычисленные вычислительным средством, допустимые пределы изменения.
2. Система управления самолетом по п. 1, в которой, если средством детектирования отказа/повреждения поверхности управления детектирована неисправность поверхности(ей) управления, если углы отклонения или скорости изменения углов отклонения, вычисленные вычислительным средством, не превышают допустимых пределов изменения, средство управления реконфигурирует первый закон управления так, чтобы исключить использование поверхности(ей) управления, неисправность которой(ых) детектирована средством контроля отказа/повреждения поверхности управления, или так, чтобы уменьшить пределы использования поверхности(ей) управления, а если углы отклонения или скорости изменения углов отклонения, вычисленные вычислительным средством, превышают допустимые пределы изменения, средство управления обеспечивает переключение с первого закона управления на второй закон управления.
3. Система управления самолетом по любому из пп. 1 или 2, в которой вычислительное средство вычисляет требуемые значения изменения момента самолета исходя из угловой скорости и углового ускорения относительно оси фюзеляжа самолета, вычисленных на основе модели откликов, отражающей кинематические характеристики самолета, и вычисляет углы отклонения и скорости изменения углов отклонения, удовлетворяющие вычисленным требуемым значениям изменения момента.
4. Система управления самолетом по п. 3, в которой вычислительное средство вычисляет требуемое значение изменения момента самолета с учетом действия гироскопического момента двигателя.
5. Самолет, содержащий систему управления самолетом по любому из пп. 1, 2 или 4.
6. Способ управления самолетом, содержащий средство управления для управления полетом на основе первого закона управления или второго закона управления, при этом первый закон управления управляет полетом путем управления углами отклонения поверхностей управления, а второй закон управления управляет полетом путем управления углами отклонения поверхностей управления и тягой двигателя, и средство детектирования отказа/повреждения поверхности управления для детектирования неисправности по меньшей мере одной из поверхностей управления, причем способ содержит:
первый этап вычисления углов отклонения и скоростей изменения углов отклонения, необходимых для реализации минимально необходимых летных характеристик, на основе результата детектирования средством детектирования отказа/повреждения поверхности управления, если средством детектирования отказа/повреждения поверхности управления детектирована неисправность поверхности(ей) управления; и
второй этап оценки того, необходимо или нет выполнить переключение с первого закона управления на второй закон управления путем оценки того, превышают или нет углы отклонения или скорости изменения углов отклонения, вычисленные на первом этапе, допустимые пределы изменения.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Станок для упаковки сортового железа | 1930 |
|
SU22564A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

