РЛС распознавания целей относится к радиолокационной технике и может быть использована для распознавания воздушных целей различных классов (типов) на всевозможных дальностях и ракурсах локации.
Распознавание целей производится в интересах определения наиболее опасных целей - носителей высокоточного оружия (ВТО) из состава массированного ракетно-авиационного удара (МРАУ) и назначения им более высокого приоритета с точки зрения очередности их уничтожения зенитными управляемыми ракетами зенитных ракетных комплексов (ЗРК).
В составе МРАУ могут находиться различные аэродинамические летательные аппараты - ударные самолеты-носители ВТО, помехопостановщики, беспилотные летательные аппараты (БЛА), топливозаправщики, самолеты прикрытия, самолеты - командные пункты воздушного базирования, ложные цели и т.д. Информационная избыточность в условиях отсутствия технической возможности ранжирования воздушных целей по степени их угрозы приводит к снижению эффективности боевых действий ЗРК.
В этой связи представляет практический интерес представляет распознавание целей не только с точностью до класса (самолет, вертолет, крылатая ракета), но и с точностью до типа летательного аппарата, и даже определение факта наличия или отсутствия средств ВТО на ударном самолете. Отделение средства ВТО от самолета-носителя представляет весьма сложный и не всегда безопасный для носителя процесс, поэтому запускаемые с самолета-носителя средства ВТО всегда размещают на внешних подвесках (пилонах), что, в свою очередь, позволяет высокоразрешающей РЛС получить радиолокационный портрет средств ВТО на внешних подвесках.
Доказанный факт отсутствия средств ВТО на внешних подвесках ударного самолета (самолет уже выполнил боевую задачу) автоматически понижает его приоритет как цели для уничтожения.
В последнее время разработаны и принимаются на вооружение в целом ряде стран, включая РФ, ударные БЛА, способные нести высокоточные средства поражения. Такие БЛА производятся серийно, стоят сравнительно недорого и при прорыве ПВО будут применяться массово. Малые габариты и малая ЭПР таких целей могут вводить в заблуждение относительно степени опасности и приоритетности уничтожения таких целей.
Атакующая сторона стремится применить средства ВТО на максимальных дальностях от атакуемого объекта, без захода или при минимальном нахождении пилотируемого ударного самолета в зоне действия ЗРК. В этой связи предъявляются требования не только к достоверности распознавания целей, но и оперативности - эта задача должна быть решена на предельно больших дальностях, сразу после обнаружения цели и определения ее государственной принадлежности («свой-чужой»).
Состояние техники. К настоящему времени известно множество способов распознавания целей, включая даже такие экзотические, как способ распознавания целей с использованием производимых летательным аппаратом акустических волн [1] или вибраций корпуса летательного аппарата [2]. Систематическая классификация методов радиолокационного распознавания приведена в [3], как по типу зондирующего сигнала [3, С. 28], так и по используемым для распознавания информативным признакам отраженного от цели сигнала [3, С. 29]. Многообразие методов и способов распознавания целей косвенно свидетельствует об отсутствии универсального метода (способа), закрывающего актуальную проблему.
По нашему мнению, на эту роль может претендовать сигнатурное радиолокационное распознавание, в котором используемым для распознавания информативным признаком является совокупность блестящих точек (БТ) в составе отраженного от цели радиолокационного сигнала при радиолокационном зондировании цели высокоразрешающей РЛС. (Встречается также использование идентичного термину «БТ» термина «отдельные рассеивающие центры (РЦ) на поверхности цели»). Взаимное положение в пространстве и индикатриса рассеяния (сигнатура) отдельной БТ (отдельного РЦ) для каждого типа летательного аппарата в квазиоптической области отражения радиоволн характеризуется постоянством, что позволяет с высокой степенью достоверности произвести идентификацию (распознавание типа) обнаруженного РЛС летательного аппарата.
Нам известно о существовании обширных баз данных по БТ большой номенклатуры летательных аппаратов, полученных путем многолетних натурных экспериментов с уменьшенными копиями этих летательных аппаратов, проведенных под руководством таких ученых, как доктора технических наук Г.А. Лопин и С.М. Нестеров в НИЦ Войск ВКО (г. Тверь).
Высокоразрешающая РЛС использует зондирующий радиолокационный сигнал, позволяющий либо непосредственно получить информацию о совокупности БТ цели с направления зондирования (радиальный, или дальностный портрет цели), либо, используя сложный зондирующий радиолокационный сигнал с внутриимпульсной модуляцией, осуществить разрешение отдельных БТ из непрерывного радиолокационного сигнала и получить тот же радиальный (дальностный) радиолокационный портрет цели на выходе приемного устройства, после оптимальной обработки принятых отраженных о цели сигналов, предусматривающей процедуру свертки отраженного сигнала в фильтре сжатия, чаще всего представляющего собой дисперсионную ультразвуковую линию задержки (ДУЗЛЗ), с существенным сокращением длительности сигналов от отдельных БТ, что позволяет получить радиолокационный портрет цели в направлении зондирования с раздельно наблюдаемыми БТ.
При совпадении совокупности принятых БТ с эталонной совокупностью БТ конкретной цели, взятой из базы данных множества летательных аппаратов, для того же ракурса (под ракурсом будем понимать угол α в горизонтальной плоскости между линией визирования цели РЛС и продольной осью летательного аппарата) цели, можно с большой долей достоверности утверждать о достижении высокой вероятности распознавания типа воздушной цели.
Ключевым моментом для осуществления распознавания является идентичность ракурса цели, взятой из базы данных, фактическому ракурсу цели на момент ее радиолокационного зондирования. Таким образом, уже на предельно возможных дальностях от защищаемого объекта и за одно зондирование необходимо располагать информацией о ракурсе обнаруженного летательного аппарата. Обстоятельствами, упрощающими подход к решению этой задачи, могут быть следующие:
1. Аэродинамические летательные аппараты симметричны относительно вертикальной плоскости, проходящей через продольную ось симметрии. Ракурсы целей в горизонтальной плоскости в ту или другую сторону относительно линии визирования «РЛС-цель» инвариантны с точки зрения радиолокационного наблюдения цели;
2. Поскольку речь идет о предельно больших дальностях обнаружения целей, составляющих, в зависимости от их ЭПР, несколько сотен километров, с большой долей вероятности можно предположить отсутствие маневров по тангажу у ударных самолетов на боевых курсах до входа в зону боевых действий, что позволит без потери общности ограничиться рассмотрением нулевых углов тангажа визируемых целей;
3. Также без потери общности можно наложить ограничение на пределы изменения ракурсов целей в горизонтальной плоскости - большие (более 45°) углы визирования цели на предельных дальностях обнаружения свидетельствуют от том, что цель, вероятнее всего, войдет в зону ответственности другого ЗРК.
Известна РЛС "Микронетикс" [3, С. 112-113, рис. 4.6], которая может быть использована для распознавания радиолокационных целей по радиолокационным дальностным портретам, получаемым за счет облучения целей импульсами очень короткой длительности (1 нс). Использование этих импульсов позволяет достичь разрешающей способности по дальности δD 15 см и, тем самым, наблюдать результаты отражения импульсов от различных элементов конструкции цели. РЛС "Микронетикс" включает эквивалент антенны, последовательно включенные высокочастотный тройник, выходной усилитель и первую антенну, последовательно соединенные магнетронный генератор, схему формирования зондирующих импульсов, элемент связи, детектор запуска и импульсный осциллограф, последовательно включенные вторую антенну, прецизионный аттенюатор, малошумящую лампу бегущий волны, усилитель мощности и детектор коротких импульсов, выход которого связан со вторым входом импульсного осциллографа. При этом второй выход элемента связи соединен со входом высокочастотного тройника, второй выход которого подключен ко входу эквивалента антенны.
Несомненным достоинством данной (и подобных ей РЛС) является очень высокая разрешающая способность по дальности (δD = 15 см), что, в принципе, позволяет реализовать сигнатурное распознавание не только самолетов, но и распознавать наличие и даже тип средств ВТО, находящихся на внешних подвесках самолета-носителя.
Недостатком данной и подобных ей РЛС является то, что, по состоянию на сегодняшний день, они позволяет определять радиолокационные характеристики целей на дальностях до единиц километров, а это в настоящее время сужает область использования таких РЛС, особенно для решения задач распознавания. Описанная РЛС в виду данного недостатка используется лишь в экспериментальных исследованиях [3, С. 112-113, рис. 4.6]. Другой недостаток РЛС "Микронетикс" - необходимость использования двух пространственно разнесенных антенн, что не только усложняет конструктивное исполнение, но и входит в противоречие с одним из важнейших требований, предъявляемых к современным ЗРК - их мобильности (способности после совершения марша за кратчайшее время приводиться в режим боевой работы, и столь же быстро покидать боевые позиции сразу по завершении боевых действий).
Наиболее близким техническим решением к заявляемому (прототипом), по мнению автора, является РЛС распознавания целей [4]. Целью изобретения являлось повышение достоверности автоматического распознавания радиолокационных целей в квазиоптической области отражения радиоволн за счет учета взаимного расположения отражателей на поверхности цели в радиальном направлении.
Авторы критикуют свой прототип [3, С. 120-126, рис. 4.11] за неиспользование информации «о различии интенсивностей отражения у различных РЦ». Вместе с тем детальный анализ предложенного технического решения показывает, что и в [4] информация о различии интенсивностей (ЭПР) у различных БТ также не используется.
Действительно, «К АЦП» (позиция 16) фактически выполняют функции К пороговых устройств - на выходе каждого АЦП формируется только сигнал логической «1» при появлении сигнала на входе и логический «0» в противном случае. Более того, даже сигнал, с которым предстоит сравнивать отраженный от цели радиосигнал - «эталонные дальностные портреты целей различных классов» (поступающие из ЦУУ 15 на управляющий вход коммутатора 18) не содержат информации об интенсивности БТ, а представляют собой всего лишь двоичные «кодовые расстановки» (в терминологии [4]).
По нашему мнению, весомый вклад в повышение достоверности сигнатурного распознавания радиолокационных целей может быть достигнут путем действительного использования всей информации, включая информацию об интенсивностях отдельных БТ, получаемую высокоразрешающей РЛС, с одной стороны, и высококачественную информацию имеющихся баз данных, включающую не только взаимное пространственное положение БТ, но и ЭПР и сигнатурах отдельных БТ, с другой стороны, путем определения степени их взаимной корреляции за время однократного зондирования, по всему ансамблю БТ, наблюдаемых в момент зондирования.
Кроме того, авторы прототипа [4], судя по описанию изобретения, отдают себе отчет о негативных последствиях размещения ограничителя по амплитуде до фильтра сжатия: «информация о различии интенсивностей отражения у различных РЦ в данном случае, к сожалению, не используется, поскольку в типовых РЛС с ЛЧМ-сигналами перед оптимальным фильтром сжатия… ставится ограничитель амплитуд сигналов». Это верно не только с точки зрения нивелирования амплитуд от отдельных БТ, более того, это может ухудшить и даже сделать невозможным разрешение сигналов отдельных БТ воздушной цели [5]. Тем не менее авторы прототипа используют амплитудный ограничитель (АО, поз. 7), перед фильтром сжатия (ДУЗЛЗ, поз. 12).
Для определения ракурса цели авторы прототипа предложили использовать сигнал с выхода системы измерения дальности (СИД, поз. 10) и сигнал с выхода системы управления антенной (СУА, поз. 1), характеризующий угловые координаты цели. Следует отметить, что данный способ измерения ракурса цели характеризуется большой инерционностью: зная угловые координаты и дальность до цели можно определить только местоположение цели (точку). Чтобы измерить ракурс цели, нужно достаточно долго ее сопровождать с целью построения траектории движения цели, и уж тогда станет возможным вычисление ракурса цели. Но и в этом случае ракурс будет определен с ошибкой, даже при движении цели с постоянным курсом. Дело даже не в рассовмещении по времени момента зондирования (определения дальности) и момента вычисления ракурса цели на основе построения трассы цели. Дело в том, что при приближении к РЛС и даже при прямолинейном движении цели ракурс ее наблюдения будет постоянно увеличиваться. Поэтому использованный авторами прототипа метод вычисления ракурса цели скажется негативно на «повышении достоверности автоматического распознавания радиолокационных целей…», заявленной авторами в качестве цели изобретения.
Целью изобретения является повышение достоверности и оперативности автоматического распознавания радиолокационных целей в квазиоптической области отражения радиоволн за счет учета интенсивностей локальных отражателей и повышения скорости измерения ракурса визирования цели.
Достижение поставленной цели обеспечивается тем, что в состав известной РЛС распознавания [2], включающей СУА, антенну, антенный переключатель, усилитель высокой частоты (УВЧ), смеситель, усилитель промежуточной частоты (УПЧ), амплитудный ограничитель (АО), передатчик, гетеродин, систему измерения дальности (СИД), амплитудный детектор, ДУЗЛЗ, дифференцирующую цепь (ДЦ), цифровое управляющее устройство (ЦУУ), K аналого-цифровых преобразователей (АЦП), K-1 линий задержки (ЛЗ), запоминающее устройство, коммутатор, инвертор кода, схему И, индикатор, причем антенна, антенный переключатель, УВЧ, смеситель, УПЧ и СИД включены последовательно, передатчик связан со 2-м входом антенного переключателя, а гетеродин соединен со 2-м входом смесителя, последовательно включенные АО, амплитудный детектор и ДЦ, выход которой соединен со 2-м входом ЦУУ, 1-й вход которого связан с выходом СИД, дополнительно вводят вторую ДУЗЛЗ, два каскада стробирования (КС), второй амплитудный детектор, два каскада бланкирования (КБ), вторую ДЦ, два формирователя, интегрирующую цепь со сбросом, измеритель длительности импульсов, пиковый детектор, N электронно-цифровых аттенюаторов (ЭЦА), N блоков квадратурной обработки (БКО), причем первые входы обоих КС соединены с выходом УПЧ, 2-й вход 1-го КС соединен с 1-м выходом ЦУУ, 2-й вход 2-го КС соединен со 2-ым выходом ЦУУ, выход 1-го КС соединен со входом АО и входом 1-ой ДУЗЛЗ, выход которой соединен со входом 2-го амплитудного детектора, а выход 2-го КС соединен со входом 2-ой ДУЗЛЗ, выход которой соединен с первыми входами N ЭЦА, а выходы N ЭЦА соединены со входами N БКО, выходы которых соединены с N информационными входами индикатора, при этом 3-ий выход ЦУУ выполнен в виде N-разрядной шины выдачи референсных данных ЦУУ и соединен с N референсными входами индикатора, а 4-й выход ЦУУ выполнен в виде N-разрядной шины выдачи эталонных данных и соединен со вторыми входами N ЭЦА, при этом 1-ый вход 1-го КБ соединен с выходом 1-го амплитудного детектора, 2-ой вход 1-го КБ соединен с выходом 1-го формирователя, вход которого соединен с выходом 1-й ДЦ, а выход 1-го КБ соединен со входом измерителя длительности импульсов, причем выход измерителя длительности импульсов соединен с 3-м входом ЦУУ, при этом 1-й вход 2-го КБ соединен со входом 2-й ДЦ и выходом 2-го амплитудного детектора, а 2-й вход 2-го КБ соединен с выходом 2-го формирователя, вход которого соединен с выходом 2-й ДЦ и 1-м входом интегрирующей цепи со сбросом, 2-ой вход которой соединен с выходом 2-го КБ, а выход интегрирующей цепи со сбросом соединен со входом пикового детектора, выход которого соединен с 4-м входом ЦУУ.
Предложенное построение схемы РЛС распознавания целей позволяет существенно повысить достоверность и оперативность распознавания воздушных целей за счет более качественного использования информации, заключенной в отраженном от цели радиолокационном сигнале, путем учета интенсивностей локальных отражателей, а также за счет повышения скорости измерения ракурса визирования цели, путем измерения ракурса цели за одно зондирование импульсной РЛС. Детальный анализ информации обеспечивает также возможность вскрытия факта наличия оружия на внешних подвесках воздушных целей, что позволяет повысить качество ранжирования целей по степени угрозы, а также на качественно более высоком уровне производить селекцию ложных целей.
На чертеже фиг. 1 представлена структурная схема РЛС распознавания целей.
РЛС распознавания целей включает антенну 1, антенный переключатель 2, УВЧ 3, смеситель 4, УПЧ 5, 1-й КС 6, АО 7, передатчик 8, гетеродин 9, 1-й амплитудный детектор 10, 1-ую ДЦ 11, 1-й формирователь 12, 1-ый КБ 13, измеритель длительности импульсов 14, 1-ую ДУЗЛЗ 15, 2-ой амплитудный детектор 16, 2-ую ДЦ 17, 2-ой формирователь 18, 2-ой КБ 19, интегрирующую цепь со сбросом 20, пиковый детектор 21, СИД 22, 2-ой КС 23, 2-ую ДУЗЛЗ 24, N ЭЦА 25, N БКО 26, индикатор 27, ЦУУ 28. При этом антенна 1, антенный переключатель 2, УВЧ 3, смеситель 4, УПЧ 5, СИД 22 и ЦУУ 28 включены последовательно. Передатчик 8 связан со 2-м входом антенного переключателя 2, а гетеродин 9 соединен со 2-м входом смесителя 4. Также последовательно соединены АО 7, 1-й амплитудный детектор 10, 1-я ДЦ 11 и ЦУУ 28, причем выход 1-ой ДЦ 11 соединен с 2-ым входом ЦУУ 28, 1-й вход которого связан с выходом СИД 22, причем первые входы 1-го КС 6 и 2-го КС 23 соединены с выходом УПЧ 5, 2-й вход 1-го КС 6 соединен с 1-м выходом ЦУУ 28, 2-й вход 2-го КС 23 соединен со 2-ым выходом ЦУУ 28, выход 1-го КС 6 соединен со входом АО 7 и входом 1-ой ДУЗЛЗ 15, выход которой соединен со входом 2-го амплитудного детектора 16, а выход 2-го КС 23 соединен со входом 2-ой ДУЗЛЗ 24, выход которой соединен с первыми входами N ЭЦА 25, а выходы N ЭЦА 25 соединены со входами N БКО 26, выходы которых соединены с N информационными входами индикатора 27, при этом 3-ий выход ЦУУ 28 выполнен в виде N-разрядной шины выдачи референсных данных ЦУУ 28 и соединен с N референсными входами индикатора 27, а 4-й выход ЦУУ 28 выполнен в виде N-разрядной шины выдачи эталонных данных и соединен со вторыми входами N ЭЦА 25, при этом 1-ый вход 1-го КБ соединен с выходом 1-го амплитудного детектора 10, 2-ой вход 1-го КБ 13 соединен с выходом 1-го формирователя 12, вход которого соединен с выходом 1-й ДЦ 11, а выход 1-го КБ 13 соединен со входом измерителя длительности импульсов 14, причем выход измерителя длительности импульсов 14 соединен с 3-м входом ЦУУ 28, при этом 1-й вход 2-го КБ 19 соединен со входом 2-й ДЦ 17 и выходом 2-го амплитудного детектора 16, а 2-й вход 2-го КБ 19 соединен с выходом 2-го формирователя 18, вход которого соединен с выходом 2-й ДЦ 17 и 1-м входом интегрирующей цепи со сбросом 20, 2-ой вход которой соединен с выходом 2-го КБ 20, а выход интегрирующей цепи со сбросом 20 соединен со входом пикового детектора 21, выход которого соединен с 4-м входом ЦУУ 28.
РЛС распознавания целей работает следующим образом.
Передатчик 8 формирует зондирующие СВЧ-радиосигналы, представляющие собой периодические импульсные ЛЧМ-сигналы, каждый из которых состоит из двух ЛЧМ-сигналов. Первый ЛЧМ-сигнал является низкоразрешающим, имеет небольшую (3,7 МГц) величину девиации Δf и предназначен для измерения радиальной протяженности L и ракурса α воздушной цели. Второй ЛЧМ-сигнал является высокоразрешающим, имеет большую величину девиации Δf (порядка 150 МГц, такая величина девиации позволяет получить разрешающую способность по дальности 1 м) и предназначен для распознавания типа цели и определения наличия оружия на его внешних подвесках.
РЛС дальнего радиолокационного обзора и обнаружения целей используют зондирующие сигналы большой скважности, поэтому наращивание пиковой мощности импульсов ограничивается возможностью возникновения пробоев в волноводах. В силу этого требуемая энергетика РЛС достигается увеличением длительности зондирующих импульсов и определяется исходя из требований к РЛС по дальности обнаружения целей с заданными показателями качества обнаружения (вероятностью правильного обнаружения D и ложной тревоги F). С точки зрения достижения цели изобретения величины длительностей зондирующих сигналов некритичны. Временной промежуток между импульсами выбирается из условия завершения процессов обработки информации первого импульса в ЦУУ и обеспечения готовности ЦУУ к последовательной выдаче эталонной информации синхронно с поступлением второго импульса и составляет единицы микросекунд.
Зондирующие сигналы от передатчика 8 проходят через антенный переключатель 2 на антенну 1 и излучаются ею в направлении воздушной цели, выбранной для распознавания. Отразившись от цели, радиоимпульсы принимаются антенной 1, через антенный переключатель 2 поступают на вход УВЧ 3, где происходит их усиление. Затем усиленные радиоимпульсы поступают на 1-й вход смесителя 4, на второй вход которого подается сигнал местного гетеродина 9. В результате частота радиоимпульсов понижается до промежуточной fпр и сигнал с выхода смесителя 4 поступает для усиления в УПЧ 5, с выхода которого усиленные импульсы на промежуточной частоте следуют на вход СИД 22 и первые входы первого КС 6 и второго КС 23.
СИД 22 измеряет дальность до цели стандартно, по задержке приема отраженного от цели сигнала по сравнению с зондирующим. Измеренная дальность до цели с выхода СИД 22 поступает на 1-й вход ЦУУ, где используется для расчета интенсивностей N референсных сигналов, поступающих по N-разрядной шине выдачи референсных данных ЦУУ на N референсных входов индикатора в качестве справочной информации об уровне сигналов нескольких различных целей близких ракурсов при их приеме с текущей дальности.
На вторые входы первого КС 6 и второго КС 23 поступают управляющие сигналы, соответственно с первого и второго выходов ЦУУ. Исходное положение - ожидание приема отраженных от цели сигналов - на второй вход первого КС 6 поступает высокий уровень управляющего сигнала, открывающий первый КС 6 для прохождения первого импульса отраженного сигнала и низкий уровень другого управляющего сигнала ЦУУ 28, препятствующий прохождению первого импульса отраженного сигнала через второй КС 23.
Первый импульс отраженного сигнала последовательно проходит АО7, амплитудный детектор 10, первую ДЦ 11, при этом положительный перепад с выхода первой ДЦ 11 поступает в ЦУУ 28 для синхронизации и тактирования всех процессов последующей обработки принятых сигналов. Кроме того, положительным перепадом с выхода первой ДЦ 11 запускается формирователь, представляющий собой ждущий мультивибратор, формирующий импульс, равный по длительности первому зондирующему импульсу. Чтобы можно было использовать импульс с выхода амплитудного детектора 10 для расчета радиальной протяженности L воздушной цели, его длительность необходимо уменьшить на величину длительности первого зондирующего импульса. Сигнал с выхода амплитудного детектора 10 поступает на первый вход 1-го КБ 13. На его второй вход поступает бланкирующий сигнал с выхода 1-го формирователя 12, запирающий 1-й КБ 13 на время, равное длительности первого зондирующего импульса. В результате длительность импульса на выходе первого КБ 13 можно использовать для расчета радиальной протяженности L воздушной цели в соответствии с формулой L = cτи/2, где с - скорость света, τи - длительность несжатого импульса с выхода первого КБ 13. Аналоговый сигнал с выхода первого КБ 13 поступает на вход измерителя длительности импульсов 14, выход которого соединен с 3-м входом ЦУУ 28. Определенная в ЦУУ 28 радиальная протяженность L воздушной цели позволяет сопоставить это значение с несколькими типами целей, имеющими значение, близкое к измеренной. В ЦУУ 28 также рассчитываются ракурсы целей, при этом для расчета ракурсов целей используются значения величин размаха крыльев, соответствующие типам целей, определенным на основе измерения радиальной протяженности целей. Формируется массив данных размерностью N = TR, где T - количество типов целей (Т = 3-4), длина которых близка к измеренной, R - количество близких к рассчитанному значению ракурсов (R = 3) для отобранных типов целей, после этого осуществляется выборка величин из банка данных по БТ целей и подготовка ЦУУ 28 для последовательной выдачи на N ЭЦА 25 по шине эталонных данных синхронно с поступлением высокоразрешающего второго импульса отраженного сигнала.
Количество элементов разрешения, представляющих конкретный тип цели под конкретным ракурсом, зависит от имеющейся в распоряжении разработчиков базы данных по БТ множества воздушных целей. Для представления всей номенклатуры воздушных целей в виде базы данных по БТ с разрешающей способностью 1 м необходимо использовать 50-ти элементную форму представления БТ каждой цели под каждым ракурсом, использовать девиацию зондирующего ЛЧМ-сигнала, равную 150 МГц. При этом максимальная длина Lmax воздушной цели равна 50 м.
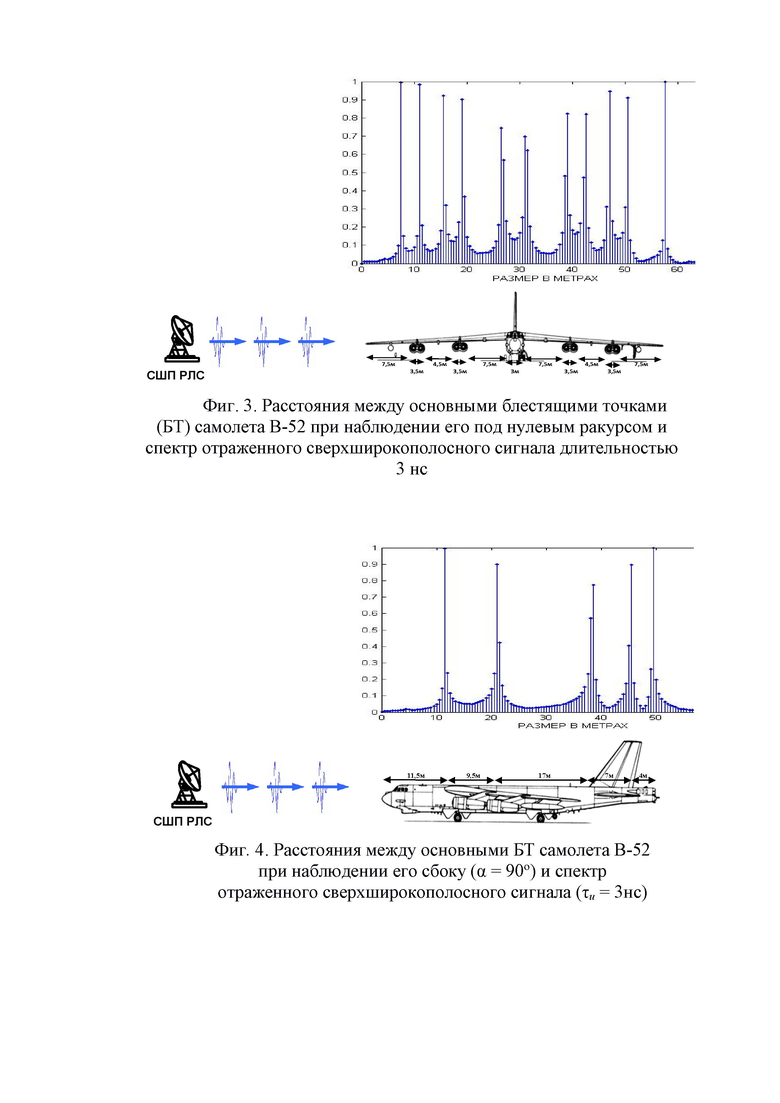
Принцип измерения ракурса цели, использованный в предлагаемом устройстве, заключается в следующем. Радиолокационная информация о цели, получаемая в составе отраженного от цели радиолокационного сигнала при визировании цели высокоразрешающей РЛС, представляет собой совокупность отдельно разрешаемых БТ. Причем, как видно из фиг. 3 и фиг. 5, подавляющее большинство наблюдаемых под ракурсами α ≤ 45° БТ являются парными. Так, из фиг. 5 усматривается, что парными являются БТ, пронумерованные как C и E, D и H, G и K, M и O. БТ G и K находятся на наибольшем удалении от фюзеляжа самолета В-52. Излучение БТ, пронумерованных как A, J, P в принципе не имеет пары, а пары блестящих точек, пронумерованных как B, F, I, L уже затенены фюзеляжем самолета при таком ракурсе наблюдения.
При зондировании цели, летящей под нулевым ракурсом (α = 0), отраженный от парных БТ радиолокационный сигнал придет на вход РЛС одновременно, сигналы парных БТ совпадут по времени и длительность принятого сигнала τсж на выходе фильтра сжатия не возрастет по сравнению с длительностью непарной БТ.
По мере увеличения ракурса длительность сигнала от парных БТ на выходе фильтра сжатия будет увеличиваться, причем приращение длительности импульсов δτ определяется разницей времени прихода сигнала от каждой БТ, составляющей пару.
Следует отметить, что при наблюдении под малыми ракурсами, характерными для атакующего ударного самолета сразу после его обнаружения РЛС на предельных дальностях, наблюдаться будут БТ (БЦ) первого «эшелона» - находящиеся на крыльях самолета; затеняться будут большинство БТ хвостового оперения, фюзеляжа и БТ от оружия, находящегося на внешних подвесках. При наблюдении целей сбоку при угле ракурса α = 90° (фиг. 4) будут наблюдаться только одиночные БТ для всех парных БТ.
Приращение длительности импульсов δτ будет различным для различных парных БТ в зависимости от их удаления от фюзеляжа - наибольшее приращение дают парные БТ, находящиеся на концах крыльев. Приращение длительности импульсов пропорционально длине линии, определяемой проекциями каждой БТ на линию визирования РЛС-цель, пропорциональной как расстоянию между БТ, составляющими пару, так и ракурсу визирования (sinα). Максимальное приращение длительности δτmax будет определяться как δτmax = 2Wsinα/c, где W - размах крыльев, c - скорость света. Применительно к стратегическому бомбардировщику В-52 (фиг. 2), имеющему длину самолета L = 49 м и размах крыльев W= 57 м, для введенного выше ограничения ракурса цели (угла визирования) углом α = 45° получаем δτmax = 0,27 мкс. Пусть этот предельный случай соответствует удвоению длительности сжатого сигнала, δτmax = τсж (нет перекрытия сжатых импульсов парных БТ), тогда, учитывая, что РЛС с оптимальным сжатием сигналов в ДУЗЛЗ длительностью сжатого импульса τсж определяется как τсж = 1/Δf, получаем, что требуемая девиация Δf первого импульса составляет 3,7 МГц.
Таким образом, в предлагаемом устройстве на основе измерения приращения длительности импульсов δτmax в ЦУУ решается задача определения ракурса α (sinα) воздушной цели путем вычисления по формуле sinα = сδτmax/2W.
Учитывая, что предлагаемое устройство при помощи первого импульса определяет радиальную протяженность L воздушной цели на основе измерения радиальной протяженности портрета цели, в ЦУУ для расчетов α (sinα) используют несколько значений размаха крыльев, соответствующих различным целям из имеющегося в ЦУУ банка данных, имеющим близкие по величине значения радиальной протяженности цели L, соответствующие измеренной величине. Для всех имеющихся в мире типов целей имеется подробная информация об их геометрических характеристиках, включая длину летательных аппаратов и размах их крыльев (см. фиг. 2).
Ударные самолеты, выполненных по технологии Stealth, используют аэродинамическую схему «летающее крыло». Наиболее интенсивные (и единственные) парные БТ при наблюдении под малыми углами визирования находятся только на концах крыльев. Фюзеляжа и хвостового оперения у самолетов Stealth нет, как нет и БТ от них. Особенность размещения оружия в таких самолетах заключается в том, что на внешних подвесках находится все оружие - не только высокоточные ракеты, но и авиабомбы.
Схемотехническая реализация измерения ракурса цели осуществляется следующим образом. Принятый от цели первый (низкоразрешающий) ЛЧМ-сигнал с девиацией Δf = 3,7 МГц с выхода первого КС 6 поступает также на вход первой ДУЗЛЗ 15, сжимаясь на выходе до длительности 0,27 мкм. С выхода первой ДУЗЛЗ 15 импульс поступает на вход второго амплитудного детектора 16. С выхода второго амплитудного детектора 16 видеоимпульс поступает на 1-й вход 2-го КБ 19 и на вход 2-й ДЦ 17. Положительным перепадом с выхода 2-й ДЦ 17 запускается второй формирователь 18, вырабатывающий импульс длительностью 0,27 мкс, поступающий на 2-й вход 2-й КБ 19 и запирающий его на время длительности сжатого 1-й ДУЗЛЗ первого ЛЧМ-импульса, а также производится сброс интегрирующей цепи со сбросом 20 (разряжается на корпус накопительный конденсатор). При ненулевых углах визирования (ракурса) α длительность видеоимпульса с выхода 2-го амплитудного детектора превысит длительность сжатого сигнала одиночной БТ (0,27 мкс) и часть сигнала пройдет на выход после снятия бланка, действующего по 2-му входу 2-го КБ 19. Поскольку речь идет об импульсах достаточно короткой длительности, для повышения стабильности работы схемы измерения приращение длительности импульсов δτ, сигнал с выхода 2-го КБ 19 последовательно проходит интегрирующую цепь со сбросом 20 и поступает на пиковый детектор 21, который фиксирует максимальное значение амплитуды, пропорциональное δτmax, которое является информационным признаком и используется в ЦУУ 28 для расчета ракурса цели. Для этого сигнал с выхода пикового детектора 21 поступает на 4-й вход ЦУУ 28.
Перед поступлением второго импульса отраженного сигнала уровни обоих управляющих сигналов с 1-го и 2-го выходов ЦУУ 28 меняются на противоположные, что блокирует прохождение второго импульса отраженного сигнала через первый КС 6 и открывает второй КС 23 для прохождение второго импульса отраженного сигнала. Принятый от цели второй (высокоразрешающий) ЛЧМ-сигнал с девиацией Δf = 150 МГц с выхода 2-го КС 23 поступает на вход 2-й ДУЗЛЗ 24, сжимаясь на выходе до длительности 6,67 нс, соответствующей разрешающей способности 1 м. Сигнал с выхода 2-й ДУЗЛЗ 24 поступает на первые входы N быстродействующих ЭЦА 25. Электронно-цифровые аттенюаторы 25 обеспечивают умножение интенсивности сигнала БТ, принимаемой в данной момент на коэффициент передачи, выставляемой пропорционально интенсивности конкретной БТ конкретной цели, наблюдаемой под конкретным ракурсом путем считывания имеющейся эталонной информации о БТ целей и их интенсивности из банка данных и изменения N коэффициентов передачи N ЭЦА 26 при поступлении информации с 4-го выхода ЦУУ 28, выполненного в виде N-разрядной шины выдачи эталонных данных и соединенного со вторыми входами N ЭЦА 25. Синхронное перемножение на весовые коэффициенты в реальном масштабе времени позволяет рассчитать степень взаимной корреляции принимаемой совокупности БТ и эталонной, имеющейся в банке данных. При правильном распознавании цели степень взаимной корреляции будет максимальной - обеспечиваются максимальные коэффициенты передачи для наиболее интенсивных БТ и минимальные для наименее интенсивных БТ, что обеспечивает максимальную величину сигнала на выходе для конкретного канала, в котором вычисляется коэффициент корреляции с правильно распознанной целью и равными ракурсами в сравнении с остальными N-1 каналами, решающими ту же задачу.
Сигналы с выходов N ЭЦА 25 соединены со входами N БКО 26. Эти сигналы представляют из себя когерентные сигналы со случайными амплитудами и начальными фазами, накопление которых одноканальными интеграторами промежуточной частоты привело бы к искажению результатов вследствие взаимной интерференции сигналов различных БТ, имеющих различающиеся фазы. Поэтому N когерентных накопителей выполнены в виде N блоков квадратурной обработки 26. Квадратурная обработка является оптимальной обработкой для когерентных сигналов со случайными амплитудами и начальной фазой, конкретная реализация каждого из N БКО 26 может быть выполнена так, как показано в [6, С. 61, рис. 6.4]. С выхода каждого из N БКО 26 измеренные уровни сигналов, отражающие степень корреляции с эталонными целями, поступает на N информационных входов индикатора 27. При существенном превышении уровня сигнала на выходе одного из N каналов блоков квадратурной обработки 26 по сравнению с уровнями сигналов N-1 других каналов делается вывод о достижении правильного распознавания типа воздушной цели.
Последовательность действий по распознаванию воздушных целей с использованием предлагаемой РЛС начинается с обнаружения воздушной цели и определения ее государственной принадлежности «цель - чужой самолет), далее непосредственно осуществляется распознавание типа воздушной цели. На индикаторе отображаются наименование нескольких летательных аппаратов, которые автоматически выбрало ЦУУ 28, ориентируясь на близость значений их длины к измеренной. Для каждого выбранного типа цели отображается значения величин интенсивности сигнала, полученные на выходе соответствующих трех БКО 26 для трех близких значений ракурса. Рядом, другим цветом, отображаются соответствующие референсные (справочные) значения интенсивности сигнала цели, рассчитанные в ЦУУ 28, исходя из информации об ЭПР конкретного типа цели, дальности до цели, рассчитанной СИД 22 и поступившей на 1-й вход ЦУУ 28, а также технических характеристик РЛС - мощности передатчика 8, чувствительности приемного устройства, характеристик антенны 1 и т.д.
Учитывая, что при обнаружении цели на больших дальностях отношение сигнал/шум принимаемого сигнала может быть невелико, измеренные значения интенсивностей сигналов для N-значного массива из T типов целей и R ракурсов каждой цели могут характеризоваться неустойчивостью значений и большими отличиями от референсных величин, но уже при первом зондировании в массиве из N результатов измерений будет выявлен явный лидер. По мере увеличения отношения сигнал/шум принимаемого сигнала результаты измерений интенсивности сигнала этой цели будут стремительно увеличиваться, приближаясь и даже превосходя референсные значения. Эффект превышения уровня референсных значений для правильно распознанной цели обусловлен использованием наиболее адекватной процедуры обработки для принимаемых сигналов БТ и реализуемых в БКО 26. Квадратурная обработка является оптимальной обработкой когерентных сигналов со случайными амплитудами и начальной фазой [6, С. 61, рис. 6.4] - именно таковой является принимаемая временная последовательность БТ отраженного от цели второго (высокоразрешающего) импульса после сжатия во 2-й ДУЗЛЗ 24. Такой вид обработки полностью парирует эффект снижения ЭПР цели вследствие флюктуаций интенсивности отраженного сигнала, поскольку флюктуации интенсивности отраженного сигнала цели возникают в результате сложения когерентных сигналов, отраженных от различных БТ, имеющих случайные фазы и амплитуды.
По мере приближения атакующей цели и увеличения ракурса ее наблюдения возникнет эффект, когда для правильно распознанной цели интенсивность измеренного сигнала начнет уменьшаться. Это означает, что РЛС сопровождает цель, имеющую средства ВТО на внешних подвесках. Вместо БТ носителя, затеняемых подвешенными средствами ВТО, поступает совокупность БТ, принадлежащих средствам ВТО. Совокупность БТ от такой цели уже будет отличаться от эталонной совокупности БТ, хранимой в базе данных, расположенной в ЦУУ 28, что приведет к снижению степени корреляции и уменьшению интенсивности сигнала, вычисленного в БКО 26.
Атакующая сторона может использовать т.н. «интеллектуальные помехи», формируя множественные сигналы, не только подделывающие сигнал, отраженный от реальных целей по всем параметрам (задержка приема, доплеровский сдвиг отраженного сигнала и т.д.), что позволяет им успешно пройти все ступени селекции ложных целей в приемном устройстве РЛС, но и позволяющие завязывать трассы по ложным целям. Обстрел ложных целей приведет к существенному снижению эффективности боевых действий ЗРК. Предложенное техническое решение позволит в том числе эффективно и заблаговременно селектировать ложные цели, поскольку в предложенном техническом решении идет анализ по совокупности БТ, искусственно создать которую в формируемом сигнале ложных целей атакующей стороной невозможно в принципе. Это позволяет на качественно более высоком уровне производить селекцию ложных целей.
Следует отметить, что вышеприведенные конкретные числовые значения рассчитывались в предположении использования разработчиками заявляемой РЛС базы данных по БТ номенклатуры воздушных целей с дискретностью представления, равной 1 м и содержащей 50 элементов представления совокупности БТ каждой цели под каждым ракурсом, с учетом различий интенсивности отдельных БТ. При реализации с использованием отличающихся баз данных допустимо некоторые изменения приведенных выше расчетных данных, не влияющие на возможности по реализации заявляемой РЛС.
Заявляемое техническое решение может быть использовано в РЛС дальнего радиолокационного обзора и обнаружения 91Н6Е, серийно выпускаемой предприятием, входящим в состав «Концерна ПВО «Алмаз-Антей» и находящейся в эксплуатации в ряде стран мира, путем доработок на местах постоянной дислокации. Доработки не требуют использования элементной базы следующего поколения и больших материальных затрат, поскольку доработки не меняют принципов построения и обработки сигналов этой РЛС и не затрагивают наиболее ресурсоемких систем, в частности, не предусматривают модернизации с заменой мощных приборов формирования СВЧ-излучения, антенну на основе ФАР и т.д. Эта РЛС имеет возможность перестройки по частоте зондирующего ЛЧМ-сигнала в пределах нескольких сотен мегагерц от зондирования к зондированию, поэтому предлагаемая величина девиации частоты, равная 150 МГц, лежит в пределах полосы пропускания передающего и приемного трактов, а также антенны и антенно-волноводной системы; каких-либо доработок этих систем при реализации заявленного технического решения не потребуется. Вычислительные мощности штатного ЦУУ радиолокационной станции 91Н6Е имеют достаточные ресурсы, позволяющие реализовать программно-аппаратную обработку принимаемых радиолокационных сигналов в интересах оперативного распознавания типов атакующих воздушных целей и вскрытия наличия оружия на их внешних подвесках.
Таким образом, целесообразность использования предлагаемого в данном изобретении нового технического решения очевидна.
Литература
1. Патент на изобретение RU 2589290 C1 (аналог);
2. Патент на изобретение RU 2407031 C1(аналог);
3. Небабин В.Г. Сергеев В.В. Методы и техника радиолокационного распознавания. М. Радио и связь, 1984, С. 112-113, рис. 4.6, С. 120-126, рис. 4.11 (аналоги);
4. Патент на изобретение RU 2094825 C1 (прототип);
5. Теоретические основы радиолокации. Под ред. Ширмана Я.Д. - М., «Советское радио», 1970, С. 132;
6. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: «Радио и связь», 1981, С. 61.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СИГНАЛОВ | 1996 |
|
RU2095826C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ ПО СТРУКТУРЕ ДАЛЬНОСТНОГО ПОРТРЕТА | 2012 |
|
RU2513041C2 |
| Радиофотонный передающий тракт для передачи мощных широкополосных сигналов и эффективного возбуждения антенн | 2019 |
|
RU2716269C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ГРУППЫ ОДНОТИПНЫХ МАЛОРАЗМЕРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2787843C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СОСТАВА ЦЕЛИ | 1996 |
|
RU2095827C1 |
| Способ повышения разрешающей способности радиолокационного сверхширокополосного зондирования | 2019 |
|
RU2710837C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2079857C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1996 |
|
RU2114443C1 |


Изобретение относится к области радиолокационных измерений и может быть использовано в импульсных РЛС для распознавания воздушных объектов на разных ракурсах и дальностях. Техническим результатом изобретения является повышение достоверности и оперативности автоматического распознавания радиолокационных целей в квазиоптической области отражения радиоволн за счет учета интенсивностей локальных отражателей и повышения скорости измерения ракурса визирования цели. Для этого в радиолокационную станцию распознавания целей вводят дополнительно вторую дисперсионную ультразвуковую линию задержки, два каскада стробирования, второй амплитудный детектор, два каскада бланкирования, вторую дифференцирующую цепь, два формирователя, интегрирующую цепь со сбросом, измеритель длительности импульсов, пиковый детектор, N электронно-цифровых аттенюаторов, N блоков квадратурной обработки, изменяя соответствующим образом межблочные связи. Обеспечивается более качественное использование информации, заключенной в отраженном от цели радиолокационном сигнале, путем учета интенсивностей локальных отражателей, а также за счет повышения скорости измерения ракурса визирования цели, путем измерения ракурса цели за одно зондирование импульсной РЛС. Детальный анализ информации обеспечивает также возможность вскрытия факта наличия оружия на внешних подвесках воздушных целей, что позволяет повысить качество ранжирования целей по степени угрозы, а также на качественно более высоком уровне производить селекцию ложных целей. 5 ил.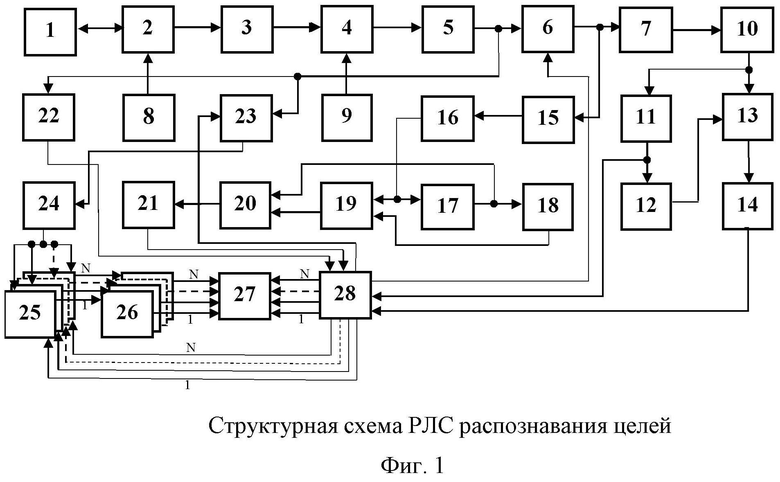
Радиолокационная станция распознавания целей, содержащая передатчик, гетеродин, дисперсионную ультразвуковую линию задержки, цифровое управляющее устройство, индикатор, последовательно соединенные антенну, антенный переключатель, усилитель высокой частоты, смеситель, усилитель промежуточной частоты, систему измерения дальности, причем второй вход антенного переключателя связан с выходом передатчика, а второй вход смесителя с выходом гетеродина, последовательно включенные амплитудный ограничитель, амплитудный детектор и дифференцирующую цепь, выход которой соединен с вторым входом цифрового управляющего устройства, первый вход которого связан с выходом системы измерения дальности, отличающаяся тем, что в состав радиолокационной станции дополнительно введены вторая дисперсионная ультразвуковая линия задержки, два каскада стробирования, второй амплитудный детектор, два каскада бланкирования, вторая дифференцирующая цепь, два формирователя, интегрирующая цепь со сбросом, измеритель длительности импульсов, пиковый детектор, N электронно-цифровых аттенюаторов, N блоков квадратурной обработки, причем первые входы обоих каскадов стробирования соединены с выходом усилителя промежуточной частоты, второй вход первого каскада стробирования соединен с первым выходом цифрового устройства управления, второй вход второго каскада стробирования соединен со вторым выходом цифрового устройства управления, выход первого каскада стробирования соединен со входом амплитудного ограничителя и входом первой дисперсионной ультразвуковой линии задержки, выход которой соединен со входом второго амплитудного детектора, а выход второго каскада стробирования соединен со входом второй дисперсионной ультразвуковой линии задержки, выход которой соединен с первыми входами N электронно-цифровых аттенюаторов, а выходы N электронно-цифровых аттенюаторов соединены со входами N блоков квадратурной обработки, выходы которых соединены с N информационными входами индикатора, при этом третий выход цифрового устройства управления выполнен в виде N-разрядной шины выдачи референсных данных цифрового устройства управления и соединен с N референсными входами индикатора, а четвертый выход цифрового устройства управления выполнен в виде N-разрядной шины выдачи эталонных данных и соединен со вторыми входами N электронно-цифровых аттенюаторов, при этом первый вход первого каскада бланкирования соединен с выходом первого амплитудного детектора, второй вход первого каскада бланкирования соединен с выходом первого формирователя, вход которого соединен с выходом первой дифференцирующей цепи, а выход первого каскада бланкирования соединен со входом измерителя длительности импульсов, причем выход измерителя длительности импульсов соединен с третьим входом цифрового устройства управления, при этом первый вход второго каскада бланкирования соединен со входом второй дифференцирующей цепи и выходом второго амплитудного детектора, а второй вход второго каскада бланкирования соединен с выходом второго формирователя, вход которого соединен с выходом второй дифференцирующей цепи и первым входом интегрирующей цепи со сбросом, второй вход которой соединен с выходом второго каскада бланкирования, а выход интегрирующей цепи со сбросом соединен со входом пикового детектора, выход которого соединен с четвертым входом цифрового устройства управления.
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2483320C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ ПО СТРУКТУРЕ ДАЛЬНОСТНОГО ПОРТРЕТА | 2012 |
|
RU2513041C2 |
| УСТРОЙСТВО ЛОГИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1998 |
|
RU2149420C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СОСТАВА ЦЕЛИ | 1996 |
|
RU2095827C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 2009 |
|
RU2407033C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1995 |
|
RU2099735C1 |
| Механический копер для забивки свай | 1928 |
|
SU13508A1 |
| KR 101460591 B1, 12.11.2014 | |||
| Машина для мойки водорослей и т.п. | 1934 |
|
SU43511A1 |
| US 4907001 A, 06.03.1990 | |||
| US 8130136 B2, 06.03.2012 | |||
| US 6980151 B1, 27.12.2005. | |||

