Изобретение относится к системам автоматического регулирования, где необходимо поддерживать ориентацию солнечных батарей, а также вакуумных солнечных коллекторов с тепловыми трубками относительно источника излучения.
Для поддержания ориентации, известные системы слежения (см. Байере Т. 20 конструкций с солнечными элементами. - М.: Мир, 1988. Журнал Радио №5 за 2002 г. Электроника в быту - Гелиостат) не обеспечивают необходимым порогом срабатывания, который меняется в зависимости не только от дифференциальной, но и от общей интенсивности излучения. Для установки таких систем в исходное положение требуется вмешательство обслуживающего персонала. При облачной погоде устройства выходят из зоны регулирования, что снижает их эффективность применения.
Целью предлагаемого изобретения является снижение себестоимости при производстве товара, повышение точности ориентации и слежения солнечных батарей на источник излучения при облачной погоде.
Установим, какая должна быть мощность исполнительного электропривода, в качестве которого выбираем Регулятор скорости согласно патенту RU 2380733, МПК G05D 13/00, опубликованному 27.01.2010, Бюл. №3, скорость которого может регулироваться от нуля до номинальных скоростей приводных двигателей и выше. Человек в состоянии переместить платформу с солнечными батареями с помощью рычага. При этом он совершит работу 3000 кГс·м. Задаемся силой действующей на рычаг 30 кГс и пройденным расстоянием 100 м. Учитывая, что гравитационные силы, действующие на платформу, симметричны относительно ее оси, выбранные параметры значительно завышены с целью обеспечения запаса по мощности. При эквивалентном переводе получаем совершенную человеком работу 8,35 Вт·ч. Переходя на мощность и учитывая, что система за сутки совершает оборот, получим одну десятитысячную ватта. Полученная мощность является намного меньше мощности электропривода детской игрушки. Как видим, электропривод платформы может работать круглосуточно практически на холостом ходу, при незначительном потреблении электроэнергии.
При использовании предлагаемого Регулятора скорости, задаем ему постоянную выходную скорость, соответствующую скорости горизонтального слежения солнечных батарей относительно источника излучения с последующей корректировкой напряжением, представляющим собой разность ЭДС датчиков, которое по внешней обратной связи, известными в технике способами, передается, например, на дополнительную обмотку исполнительного электродвигателя, который меняет скорость в сторону увеличения угла падения солнечных лучей.
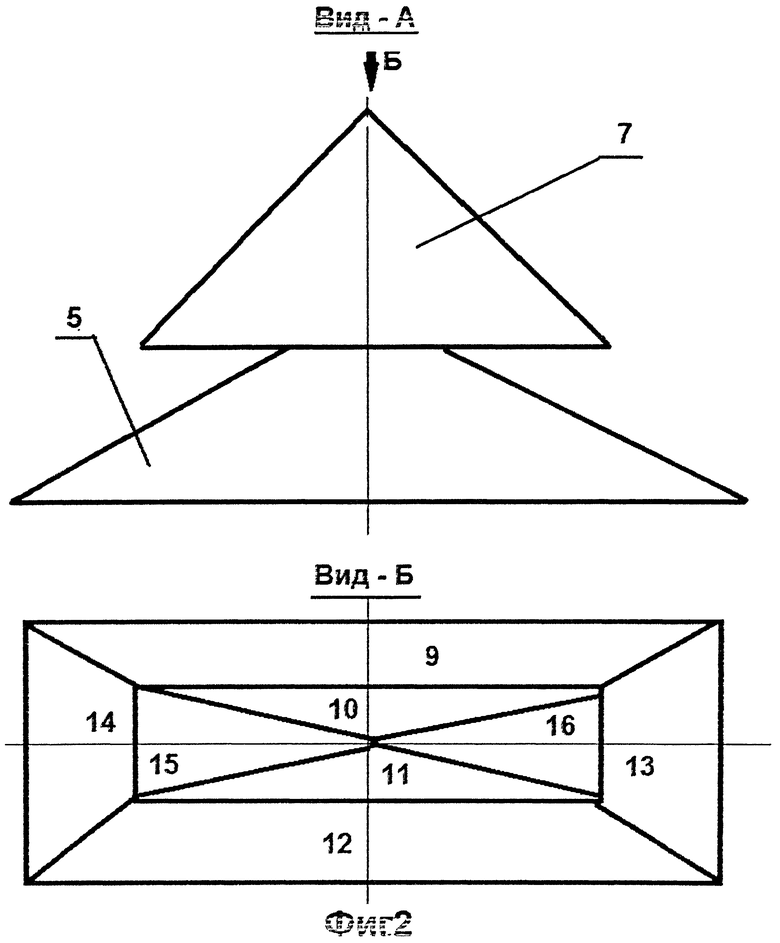
На фиг.1 и фиг.2 изображена схема устройства, реализующая работу предлагаемого способа. Устройство содержит платформу 1, имеющую две степени свободы вращения относительно осей Y-Y и Х-Х. На платформе 1 симметрично относительно оси Y-Y расположены солнечные батареи 2 или вакуумные солнечные коллекторы с тепловыми трубками. Горизонтальное слежение осуществляется электроприводом 3, а вертикальное электроприводом 6. На платформе 1 также расположен узел 4, состоящий из усеченной пирамиды 5 и пирамиды 7, причем пирамида 7 размещена на меньшем основании пирамиды 5, с частичным перекрытием боковых граней усеченной пирамиды 5. Боковые грани пирамид представляют собой датчики 9, 10, 11, 12, 13, 14, 15, 16, в качестве которых могут использоваться устройства, преобразующие энергию источника излучения в электрическую, например солнечные батареи. Датчики 9 и 10, 11 и 12, 14 и 15, 16 и 13 соединены последовательно-согласованно и при действии на них светового потока генерируют соответственно ЭДС 9, 10; ЭДС 11 12; ЭДС 14, 15; ЭДС 16, 13. При встречном соединении ЭДС 9, 10; ЭДС 11, 12 и ЭДС 14, 15; ЭДС 16, 13 получаем напряжения Нв - вертикального перемещения и Нг - горизонтального перемещения. Если плоскость большего основания пирамиды 5 при слежении находится под небольшим углом к плоскости солнечных батарей, то этот угол можем регулировать, например, с помощью дифференциальных винтов, по отношению вектора светового потока. На верхнюю часть призмы может быть установлена выпуклая собирающая линза, на фиг.2 не показана.
Устройство работает следующим образом. Подаем напряжение от батареи или аккумулятора на электропривод 3 для углового горизонтального слежения за источником излучения. При этом угловая скорость слежения должна соответствовать угловой скорости перемещения Солнца по горизонту. При солнечном освещении узла 4, Нв и Нг равны нулю, при условии перпендикулярности светового потока относительно плоскости основания пирамиды 5. Поэтому ориентация не происходит. При перемещении Солнца, угол наклона лучей на узел 4 изменяется, и в результате неравномерной освещенности граней пирамид 5 и 7 возникают Нв и Нг, которые изменяют скорость электроприводов 6 и 3 в сторону уменьшения Нв и Нг, т.е. восстановления перпендикулярности солнечных лучей. Аналогично работает цепочка вертикальной ориентации, где исполнительным элементом является электропривод 6. При непараллельности плоскостей солнечных батарей 2 и основания пирамиды 5, а также низком пороге чувствительности ориентация может происходить при уже некоторых значениях Нв и Нг, что приведет к некоторому угловому опережению или отставанию плоскости батарей 2 к тепловому потоку. Для устранения этого возможно применение дифференциальной винтовой регулировки. При закате Солнца возможны два варианта работы устройства. Первый - продолжается слежение без ориентации до восхода Солнца. Второй - после заката Солнца устройство возвращается на исходную позицию, определяемую восходом. При этом реверс и остановка происходит с помощью конечных выключателей, а включение устройства осуществляется с помощью путевого выключателя, который включается при восходе Солнца в результате движения платформы при ориентации.
Предлагаемое устройство может найти самое широкое применение в области альтернативной энергетики. Позволяет поддерживать большую точность за счет увеличения управляющего воздействия на единицу углового рассогласования, которое увеличивается за счет теневого эффекта пирамиды 7 на пирамиду 5. Использование одного управляющего воздействия для двух электродвигателей электропривода позволяет обойтись без промежуточных устройств, например усилителей, что приводит к увеличению надежности и эффективности систем автоматики. В результате этого, предлагаемое устройство может найти применение в космической отрасли для ориентации солнечных батарей в космосе. Исключают вмешательство обслуживающего персонала.
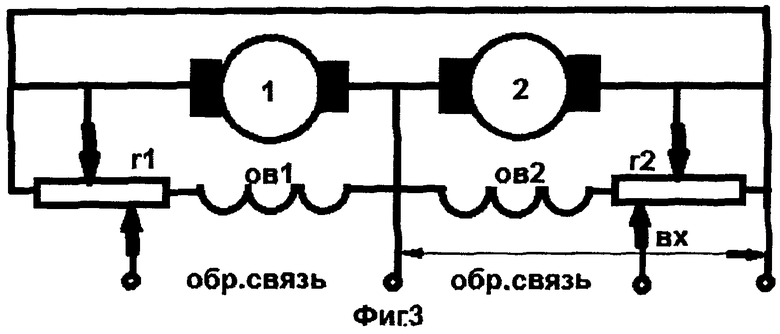
На фиг.3 изображен регулятор скорости в виде двух электродвигателей 1 и 2, с обмотками возбуждения ов1, ов2. С помощью независимого источника напряжения, например батарейки или аккумулятора, которое подается на вход регулятора, устанавливается постоянная выходная скорость, соответствующая скорости слежения солнечных батарей, относительно источника излучения. Обратная связь для горизонтального слежения осуществляется, например, подачей напряжения на обмотки возбуждения ов1, ов2 двигателей 1 и 2 (фиг.3) от двух плоскостных датчиков, представляющих собой солнечные батареи, которые расположены горизонтально и наклонены друг к другу под некоторым углом к плоскости основных солнечных батарей и образуют совместно со второй вертикальной парой датчиков правильную усеченную пирамиду, основания которой параллельны плоскости основных солнечных батарей.
При перпендикулярности светового потока плоскости основных солнечных батарей сумма ЭДС горизонтальных датчиков, электрически соединенных последовательно встречно, равна нулю, слежение происходит с заданной скоростью. При опережении или отставании слежения появляется напряжение обратной связи, которое изменяет выходную скорость регулятора в сторону уменьшения рассогласования. Так, напряжение обратной связи, соответствующим образом подаваемое на обмотки возбуждения двигателей, изменяет их скорость, вырабатывая на выходе регулятора необходимый положительный или отрицательный скоростной градиент.
Новизна усматривается в увеличении точности регулирования при малых выходных скоростях, за счет одновременного регулирования скорости двух двигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА АВТОМАТИЧЕСКОГО СЛЕЖЕНИЯ ПРИЕМНОЙ ПАНЕЛИ ЗА СОЛНЦЕМ | 2011 |
|
RU2482401C2 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ И СЛЕЖЕНИЯ ЗА СОЛНЦЕМ КОНЦЕНТРАТОРНОЙ ФОТОЭНЕРГОУСТАНОВКИ | 2014 |
|
RU2579169C1 |
| СОЛНЕЧНАЯ УСТАНОВКА | 2014 |
|
RU2570483C1 |
| СОЛНЕЧНЫЙ ФОТОЭЛЕКТРОГЕНЕРАТОР | 2022 |
|
RU2791962C1 |
| АВТОМАТИЧЕСКИЙ ПРИЕМНИК СОЛНЕЧНОЙ ЭНЕРГИИ | 1998 |
|
RU2147358C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО ДЛЯ СОЛНЕЧНОГО ЭНЕРГОМОДУЛЯ | 2007 |
|
RU2381426C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПЛАТФОРМОЙ КОНЦЕНТРАТОРНЫХ СОЛНЕЧНЫХ МОДУЛЕЙ | 2015 |
|
RU2611571C1 |
| РЕГУЛЯТОР СКОРОСТИ | 2008 |
|
RU2380733C1 |
| СИСТЕМА ПРОГНОЗА ОГРАНИЧЕННОЙ ПОСАДОЧНОЙ ВИДИМОСТИ, ОБУСЛОВЛЕННОЙ СЛЕПЯЩИМ ВОЗДЕЙСТВИЕМ СОЛНЦА, НИЗКО РАСПОЛОЖЕННОГО НАД ГОРИЗОНТОМ | 2015 |
|
RU2651434C2 |
| ЭЛЕКТРОПРИВОД КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2565795C2 |
Изобретение относится к системам автоматического регулирования, поддерживающим ориентацию солнечных батарей. Технический результат заключается в повышении точности ориентации и слежения солнечных батарей. Для этого предложен способ автоматической ориентации солнечных батарей, содержащий систему автоматического регулирования, состоящую из солнечной батареи и датчика, преобразующего с помощью внешней обратной связи энергию источника излучения, являющуюся функцией угла поворота солнечной батареи, в напряжение, которое подается на вход исполнительных электродвигателей, изменяющих скорость в сторону увеличения светового потока, при этом исполнительными электродвигателями изначально задается постоянная угловая скорость горизонтального и вертикального слежения солнечной батареи относительно источника излучения (солнца) с последующей корректировкой напряжением, представляющим собой разность ЭДС датчика, которое по внешней обратной связи передается на обмотки исполнительных двигателей. Также предложен датчик, используемый в указанном способе. 2 н.п. ф-лы, 3 ил.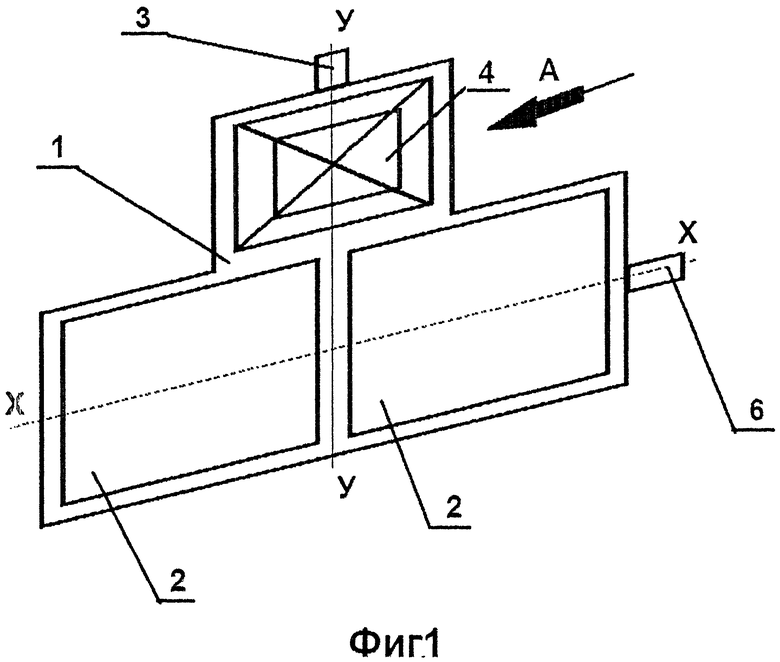
1. Способ автоматической ориентации солнечных батарей, содержащий систему автоматического регулирования, состоящую из солнечной батареи и датчика, преобразующего с помощью внешней обратной связи энергию источника излучения, являющуюся функцией угла поворота солнечной батареи, в напряжение, которое подается на вход исполнительных электродвигателей, изменяющих скорость в сторону увеличения светового потока, отличающийся тем, что исполнительными электродвигателями изначально задается постоянная угловая скорость горизонтального и вертикального слежения солнечной батареи относительно источника излучения (солнца) с последующей корректировкой напряжением, представляющим собой разность ЭДС датчика, которое по внешней обратной связи передается на обмотки исполнительных двигателей.
2. Устройство по п. 1 (датчик), содержащее усеченную четырехгранную пирамиду, на меньшем основании которой установлена четырехгранная пирамида с частичным перекрытием боковых граней усеченой пирамиды, основания пирамид параллельны и имеют форму квадратов или прямоугольников, высота пирамид проходит через центр оснований, боковыми гранями пирамид служат датчики, преобразующие энергию источника излучения в электрическую, например солнечные батареи, при этом датчик преобразует угол рассогласования падения солнечных лучей в напряжение, которое используется системой автоматического регулирования для подачи сигнала на вход двух двигателей электромеханического регулятора, которые обеспечивают постоянную перпендикулярность потока солнечной энергии на плоскость солнечной батареи.
| АВТОНОМНАЯ ФОТОЭЛЕКТРИЧЕСКАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ | 2009 |
|
RU2414037C1 |
| ПАНЕЛЬ СОЛНЕЧНОЙ БАТАРЕИ С КОНЦЕНТРАТОРАМИ | 2006 |
|
RU2317611C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2322373C2 |
| JP 07005923 A, 10.01.1995 | |||

