Изобретение относится к механическим устройствам, где необходимо регулировать частоту вращения в широких пределах, в частности оно может быть использовано в запорной арматуре для управления запорными органами или, например, для регулирования частоты вращения электронасосных агрегатов на основе объемных насосов в момент пуска объемных насосов на заполненный напорный трубопровод, где необходим плавный переход от минимально допустимой частоты вращения до номинальной, что позволяет устранять гидравлические удары, ковитационные явления, которые приводят к выходу из строя подвижных рабочих органов насоса, сокращению его ресурса работы.
Известен регулятор скорости объекта (см. патент РФ №2106681, кл. G05D 13/08), который обладает низким КПД и небольшой передаваемой мощностью, т.к. имеет направляющую, представляющую консольную балку, которая является силовым звеном.
Известен также электропривод запорного устройства (см. патент РФ №2219410 класса F16K 31/02), содержащий передаточный механизм и блок электродвигателя. Основной недостаток изобретения заключается в том, что при работе устройства на открытие запорного органа трубопровода большого диаметра возникают значительные переменные моментные нагрузки, например момент трогания может составлять 3-106 Нм, что приводит к значительным массогабаритным характеристикам указанного изобретения. Пусковые токи могут также иметь значительные значения, что отрицательно сказывается как на приводной двигатель, так и на систему электроснабжения в целом. Все это не позволяет практически использовать указанное техническое решение.
Целью предлагаемого изобретения является увеличение скоростного диапазона регулирования от 0 до скорости вращения исполнительных механизмов, увеличение ресурса работы и уменьшение массогабаритных характеристик на единицу передаваемой мощности. Указанные цели достигаются тем, что устройство содержит два электродвигателя (синхронных, асинхронных, постоянного тока или их комбинации), один из которых механически связан с колесом с внутренним зубчатым колесом, а другой - с шестерней. Между колесом и шестерней расположены сателлиты, причем выходной вал связан с волами вращения сателлитов. Таким образом, при вращении колеса и шестерни в разные стороны при подборе скоростей вращения двигателей таким образом, чтобы обеспечить равенство линейных скоростей в точках сопряжения колеса и шестерни с сателлитами, получаем нулевую скорость на выходном валу, связанном с валами сателлитов. При вращении колеса и шестерни в одну сторону, например по часовой стрелке, получаем максимальную скорость на выходном валу, равную скорости вращения двигателей. Для реверса достаточно реверсировать одновременно два двигателя. Промежуточные скорости получаем при условии вращения сателлитов вокруг шестерни, т.е. при нарушении условия равенства линейных скоростей в точках сопряжения колеса и шестерни с сателлитами.
Сопоставительный анализ с известными решениями показывает, что заявляемое устройство отличается наличием новых комбинаций механических элементов, что соответствует критерию изобретения «новизна».
При проведении патентных исследований обнаружено измерительное устройство (см. а.с. №1651076, G01B 3/18, 7/06), в котором применен платенарный редуктор, аналогичный заявляемому. Однако применение этого устройства в обнаруженном изобретении преследует другую цель, а именно повышение точности измерения.
Все перечисленные элементы в заявляемом устройстве проявляют новые свойства, которые расширяют диапазон регулирования скорости, что позволяет сделать вывод о соответствии технического решения критерию «существенное отличие».
На чертеже показана кинематическая схема устройства. Регулятор скорости содержит электродвигатель 1 с полым валом, связанным с колесом 2 с внутренним зубчатым венцом, электродвигатель 3, вал которого проходит через полый вал двигателя 1 и связан с шестерней 4. Между колесом 2 и шестерней 4 расположены сателлиты 5, валы вращения которых жестко связаны с выходным валом 6 устройства.
Устройство работает следующим образом.
При включении двигателя 1 и 3 от общего коммутирующего устройства они одновременно начинают вращаться с наперед заданными технологией требуемыми скоростями. Их вращение через колесо 2 и шестерню 4 передается сателлитам 5, которые в результате сложения линейных скоростей колеса 2 и шестерни 4 приходят во вращательное движение как относительно своих осей, так и по окружности перемещения их валов, которые через жесткие связи передают вращение выходному валу 6 устройства. При работе устройства в однодвигательном режиме шестерня или колесо, несвязанное с этим двигателем, должно быть заторможено. С целью уменьшения веса на единицу передаваемой мощности компановка устройства может иметь следующую конструкцию. Колесо 2 одновременно является ротором двигателя 1, статор которого является и статором двигателя 3, а ротор двигателя 3 жестко связан с шестерней 4. Эта конструкция приводит к значительному уменьшению габаритов.
Предлагаемое устройство просто в изготовлении, позволяет плавно регулировать скорость рабочего механизма от 0 до скорости вращения двигателей. Надо отметить, что минимальная скорость вращения выходного вала не связана с потерей мощности приводных двигателей (т.е. регулирование скорости не осуществляется с изменением сопротивления или напряжения в главной цепи). Изменение скорости двигателей, выше номинальной, осуществляется за счет изменения магнитного потока, уменьшение момента компенсируется редуктором, который увеличивает момент пропорционально отношению входной скорости к выходной.
В результате сказанного устройство позволяет осуществлять пуск и торможение со сколь удобно малой плавности разгона или торможения. При работе устройства как в динамических, так и статических режимах на сателлиты действует пара сил, которые уравновешиваются вращением сателлитов вокруг своих осей. Автоматическое уравновешивание этих сил означает то, что нагрузка между двигателями распределяется поровну. Повышение жесткости механической характеристики устройства 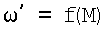 может быть обеспечена при условии, если двигатель колеса 2 имеет более жесткую характеристику, чем двигатель шестерни. Тогда при изменении нагрузки скорость двигателя колеса изменяется меньше, чем двигатели шестерни, в результате чего разность линейных скоростей при вращении двигателей в разные стороны возрастает. Значит, при увеличении нагрузки устройства его скорость может увеличится.
может быть обеспечена при условии, если двигатель колеса 2 имеет более жесткую характеристику, чем двигатель шестерни. Тогда при изменении нагрузки скорость двигателя колеса изменяется меньше, чем двигатели шестерни, в результате чего разность линейных скоростей при вращении двигателей в разные стороны возрастает. Значит, при увеличении нагрузки устройства его скорость может увеличится.
Данное устройство может найти применение в различных областях техники, например в автотранспорте, что позволит обойтись без таких трудоемких и дорогих узлов, как сцепление, тормозное устройство, коробка скоростей, кардан при одновременном увеличении управляемости и маневренности. Благодаря небольшой скорости и значительному вращающему моменту транспортное средство может иметь проходимость, в разы превосходящую проходимость существующих машин. Быстрота изменения скорости как положительной, так и отрицательной приводит к сокращению разгонного и тормозного пути и легко достигает значений согласно медицинских норм, так при использовании устройство в качестве приводов шасси самолетов значительно сократит полосу разбега и торможения при взлете и приземлении, что исключает применение парашютного торможения. Может дать значительный экономический и технический эффекты при применении предлагаемого устройства в станкостроении, в качестве привода двигателей надводного и подводного транспорта. Ввиду незначительных массогабаритных характеристик может использоваться в космической отрасли как в качестве силового элемента, так и в качестве передающего звена в системах автоматического регулирования.
Изобретение относится к машиностроению, где необходимо регулировать скорость в широких пределах. Техническим результатом является увеличение скоростного диапазона регулирования и ресурса работы. Регулятор скорости содержит планетарный редуктор и два электродвигателя, один из которых механически связан с внешним колесом, а другой с шестерней редуктора. Между колесом и шестерней имеются сателлиты, валы которых связаны с выходным валом устройства. 2 з.п. ф-лы, 1 ил.
1. Регулятор скорости, содержащий планетарный редуктор и два приводных электродвигателя, отличающийся тем, что один из электродвигателей механически связан с внешним колесом редуктора, а другой с шестерней, между которыми находятся сателлиты, имеющие две степени свободы, валы которых связаны с выходным валом регулятора.
2. Устройство по п.1, отличающееся тем, что для увеличения передаваемого момента устройство содержит моментные диски, соединяющие валы сателлитов с выходным валом устройства.
3. Устройство по п.1, отличающееся тем, что колесо с внутренним зубчатым венцом одновременно является ротором двигателя с полым валом, статор которого является статором и другого двигателя, ротор которого жестко связан с шестерней.
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2136101C1 |
| Измерительное устройство | 1989 |
|
SU1651076A1 |
| РЕГУЛЯТОР СКОРОСТИ ОБЪЕКТА | 1992 |
|
RU2106681C1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОГО УСТРОЙСТВА | 1987 |
|
RU2219410C2 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 0 |
|
SU319996A1 |

