Изобретение относится к области морской техники и предназначено для навигационного оборудования морских районов и обеспечения безопасности кораблевождения и определения в море своих координат плавсредствами (надводными кораблями и судами, подводными лодками и аппаратами).
Навигационное оборудование морского района представляет собой систему специальных береговых и плавучих сооружений, конструкций и устройств, предназначенных для обеспечения безопасности кораблевождения (судовождения) и служит для определения координат кораблей и судов в море, их правильной ориентировки во время плавания в прибрежных и мелководных районах. Средствами навигационного оборудования служат береговые и плавучие маяки, светящиеся и несветящиеся знаки, навигационные огни, плавучие предостерегающие знаки (буи и вехи), радио-, радиолокационные и гидроакустические маяки, наземные станции радионавигационных систем и другие средства [Военно-морской словарь / Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С. 265].
Наиболее сложным является обеспечение безопасности плавания и точной ориентировки подводных плавсредств, так как большая часть средств навигационного оборудования установлена на поверхности воды или на берегу. Для подводных плавсредств в качестве навигационного оборудования применяют систему ведущего кабеля, обеспечивающую их движение по строго лимитированным путям (фарватерам). Принцип действия навигационной системы с ведущим кабелем основан на измерении амплитудных и фазовых соотношений электродвижущих сил, наводимых в приемных рамках бортовой аппаратуры электромагнитным полем кабеля, проложенным по дну фарватера. При этом с помощью бортовой (судовой) приемной аппаратуры определяется положение и направление движения корабля (судна) относительно кабеля. [И.С. Калинский.
Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. 428 с. С. 206].
Навигационная система с ведущим кабелем включает электростанцию питания, проложенный по дну фарватера кабель, гидроакустические отметчики для обозначения характерных точек на трассе, приемное устройство бортовой аппаратуры, имеющее приемные рамки из трех взаимно перпендикулярных сердечников и насаженными на них катушками, тремя усилителями, настроенными на частоту тока в кабеле, стрелочные индикаторы корабельной (судовой) аппаратуры, определяющие положение корабля (судна) относительно кабеля «слева» или «справа» и направление движения корабля (судна) «к кабелю» или «от кабеля» [И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. 428 с. С. 208-210].
Известна арктическая подводная навигационная система, предназначенная для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания [Арктическая подводная навигационная система... Патент на изобретение RU 2596244 / О.М. Кочаров, К.О. Кочаров., А.О. Кочаров, А.А. Кочаров. М.: ФИПС, 2016. Бюл. №25], которая включает в себя:
- проложенный по дну ведущий кабель,
- береговой генератор тока,
- судовую аппаратуру и
- установленные вдоль трассы кабеля два и более гидроакустических маяка с различающимися частотами излучения импульсных сигналов, синхронизированных по тому же кабелю.
Для повышения точности навигационного обеспечения объектов навигации навигационную систему дополнительно комплектуют наземным комплексом с генератором тока крайне низких частот с возможностью генерирования и излучения электромагнитных импульсных сигналов по ведущему кабелю и генератором синхроимпульсов с возможностью синхронно или с «кодированной» задержкой времени излучать импульсные сигналы различающихся частот гидроакустическими маяками. При этом судовая аппаратура объектов навигации должна определять свое местоположение дальномерным методом по измеренным значениям времени прохождения сигнала от каждого датчика и гиперболическим методом от пары датчиков независимо от измеренной разности времени прохождения сигнала.
Для уменьшения демаскирования подводных объектов навигации при получении ими навигационной информации в навигационную систему дополнительно устанавливают ответвление от ведущего кабеля с гидроакустическим маяком-ответчиком с управляемой, адаптируемой дальностью действия двухсторонней звукоподводной связи, автономным источником питания и устройством его подзарядки по кабелю.
Для повышения надежности односторонней связи с подводным объектом навигации и устойчивости его вождения по трассе ведущего кабеля судовой аппаратурой в навигационной системе возбуждают второе электромагнитное поле более высокой частоты, соразмерной необходимому уровню информационной емкости и надежности связи, и создают электромагнитный коридор судовождения по ведущему кабелю крайне низких частот.
При использовании навигационной системы на акваториях, отягощенных ледовой обстановкой, в ее состав дополнительно включают установленный по трассе ведущего кабеля эхоледомер с электронно-управляемой формой характеристики направленности, выполненный с возможностью определения наличия льда, измерения его толщины и размеров разводов в ледовом покрове, а также обнаружения несанкционированных надводных и подводных объектов и передачи информации по тому же кабелю на пункты управления проводкой судов.
Для использования навигационной системы на участках малых глубин в период сезонных и приливно-отливных изменений в ее состав дополнительно включают датчик гидростатического давления, встроенный в ведущий кабель и служащий для передачи по тому же кабелю на наземный комплекс текущего значения глубины.
Рассмотренная арктическая подводная навигационная система предназначена для обеспечения безопасного плавания судов и других плавсредств Северным морским путем и их проводки на наиболее сложных и ответственных участках.
Способ оборудования морских районов арктической подводной навигационной системой включает применение судна-укладчика ведущего кабеля, а в районах, отягощенных ледовой обстановкой, дополнительное привлечение ледокола. Такой способ навигационного оборудования морского района, принятый за прототип изобретения, имеет свои недостатки.
Применение судна для укладки ведущего кабеля и ледокола, демаскирует оборудуемый район, так как используемые суда легко обнаруживаются береговыми, морскими, воздушными и космическими средствами наблюдения заинтересованных государств. В результате факт оборудования района арктической подводной навигационной системой становится общеизвестным и служит причиной для привлечения к нему дополнительного внимания. Таким образом, отсутствие скрытности оборудования района арктической подводной навигационной системой составляет главный недостаток существующего способа.
Указанный недостаток может быть устранен, если для оборудования морского района подводной навигационной системой использовать в качестве укладчика ведущего кабеля плавсредство, обладающее необходимой скрытностью, то есть подводное.
Известно такое подводное плавсредство, как самоходный подводный аппарат (СПА), взятый за прототип изобретения [Сиденко К.С., Илларионов Г.Ю. Подводная лодка и автономный необитаемый подводный аппарат // МРЭ, №2, 2008]. Самоходный подводный аппарат оснащается движителем и является разновидностью автономного необитаемого подводного аппарата. Типовой СПА имеет корпус обтекаемой цилиндрической или иной формы, и, кроме средств движения, оснащается источником энергии, гидроакустическими и/или телевизионными средствами поиска, навигационным оборудованием, средствами связи, отсеком для полезной нагрузки и приборами управления. Для связи с пунктом управления он оборудуется аппаратурой связи с гидроакустическим и/или радиотехническим каналом.
Современные СПА предназначены для выполнения различных подводных работ, они производят гидроакустические, гидрографические и батиметрические измерения, обследуют гидротехнические сооружения, ведут поисковые работы по обнаружению и идентификации морских подводных объектов [И. Белоусов. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение, 2013, №5. С. 79-88]. Однако для навигационного оборудования морских районов и укладки в них ведущего кабеля СПА применения не нашли.
Технической задачей группы изобретений является разработка способа навигационного оборудования морского района и самоходного подводного аппарата для его осуществления.
Для достижения первой цели изобретения предлагается способ навигационного оборудования морского района, при котором укладывают на дно вдоль трассы проводки плавсредств подводную навигационную систему с ведущим кабелем и создают электромагнитный коридор судовождения.
Дополнительно укладку ведущего кабеля и его оборудования производят самоходным подводным аппаратом, который доставляют в заданный район на надводном, подводном или воздушном носителе, производят его предстартовую подготовку, устанавливают в бортовую систему управления подводного аппарата маршрутное задание и по готовности выпускают в воду. При подходе подводного аппарата к точке начала постановки ведущего кабеля производят его всплытие на поверхность, где уточняют с помощью спутниковой, радио- или гидроакустической системы навигации географические координаты подводного аппарата и направляют его в точку начала постановки ведущего кабеля. В этой точке отдают якорь-заземлитель с подсоединенным к нему ведущим кабелем и гидроакустическим датчиком, служащим для дистанционного включения и выключения системы ведущего кабеля по сигналу от объекта навигации, вытравливают ведущий кабель с вьюшки и укладывают его на грунт по курсу обозначаемого маршрута, в конечной точке завершают укладку ведущего кабеля, отдают якорь-заземлитель ведущего кабеля с подсоединенным к нему гидроакустическим датчиком, отделяемый блок с источником тока, генератором и аппаратурой для приема и излучения гидроакустических сигналов. В вариантном исполнении в концевых точках ведущего кабеля дополнительно вместе с якорем-заземлителем устанавливают гидроакустический маяк-ответчик или гидроакустический отметчик. После укладки ведущего кабеля и сопутствующего оборудования подводный аппарат направляют к носителю для подъема на борт и возвращения на базу или укладывают на грунт в конечной точке без отделения блока с источником тока, генератором и аппаратурой для приема и излучения гидроакустических сигналов.
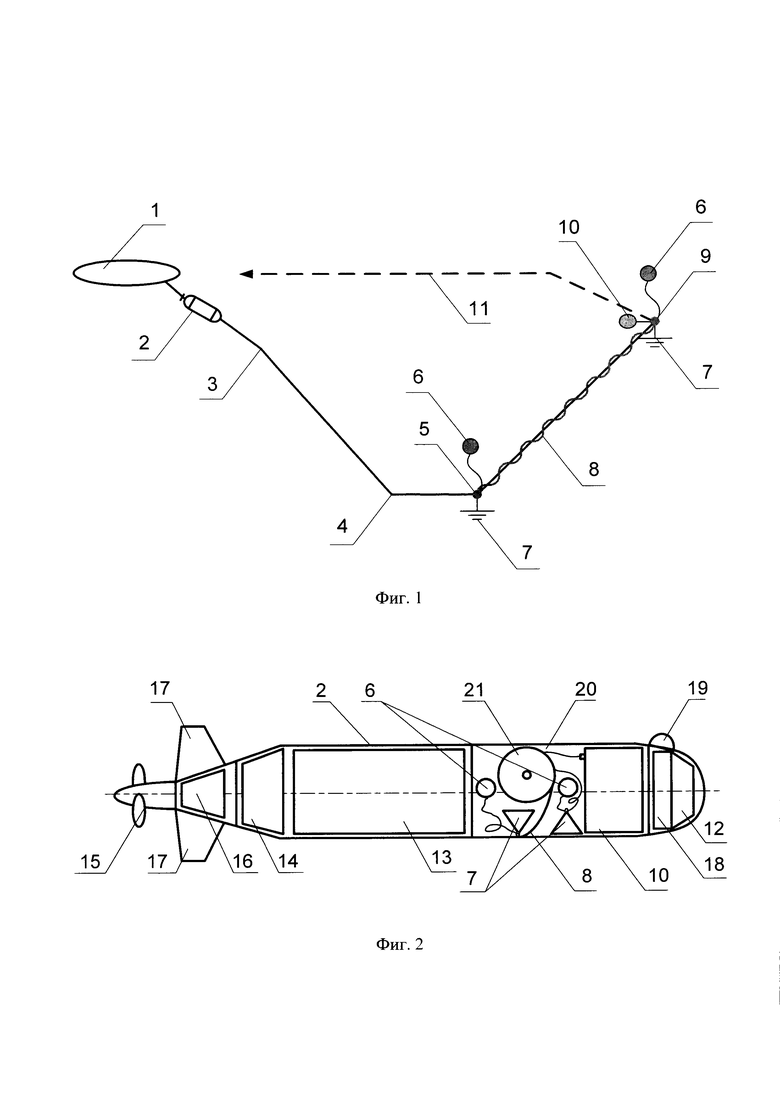
На фиг. 1 показана схема оборудования морского района подводной навигационной системой ведущего кабеля. Цифрами обозначены: 1 - судно-носитель СПА, 2 - СПА, 3 - маршрут следования СПА в район для оборудования его системой ведущего кабеля, 4 - точка уточнения географических координат СПА, 5 - точка начала укладки ведущего кабеля, 6 - гидроакустический датчик, гидроакустический маяк-ответчик или гидроакустический отметчик, 7 - заземляющий якорь в начальной и конечной точках ведущего кабеля, 8 - ведущий кабель, 9 - точка окончания укладки ведущего кабеля, 10 - отделяемый блок с источником тока, генератором и аппаратурой для приема и излучения гидроакустических сигналов, 11 - маршрут СПА для подъема на носитель после оборудования района системой ведущего кабеля при использовании отделяемого блока 10.
Для достижения второй цели изобретения предлагается самоходный подводный аппарат, имеющий бортовую систему управления, энергосиловую установку с источником энергии и двигателем, движитель, приводы рулевых машинок, стабилизаторы и рули, обеспечивающие движение подводного аппарата по заданному маршруту, навигационное оборудование, обеспечивающее работу подводного аппарата, со спутниковой, радио- или гидроакустической системой навигации, средства радио- и звукоподводной связи с пунктом управления, носителем и объектами навигации, отсек для полезной нагрузки.
Дополнительно в отсеке для полезной нагрузки размещается оборудование подводной навигационной системы с ведущим кабелем, включающее устройство постановки ведущего кабеля с вьюшкой, ведущим кабелем, двумя гидроакустическими датчиками, двумя якорями с заземлителями, отделяемый или неотделяемый от подводного аппарата блок с источником тока, его преобразователем, генератором и аппаратурой приема и излучения гидроакустических сигналов, включающей электронный блок с усилителем, шифратором и дешифратором, обеспечивающий создание электромагнитного коридора судовождения вдоль ведущего кабеля и связь подводного аппарата и выставленной им системы ведущего кабеля с носителем, пунктом управления и объектами навигации.
Дополнительно к якорю-заземлителю могут крепиться гидроакустический маяк-ответчик или гидроакустический отметчик для обеспечения объектов навигации координатами и обозначения концов ведущего кабеля.
Устройство самоходного подводного аппарата, предназначенного для оборудования морского района подводной навигационной системой ведущего кабеля, показано на фиг. 2. Цифрами обозначены: 2 - СПА, 6 - гидроакустический датчик, гидроакустический маяк-ответчик или гидроакустический отметчик, 7 - якорь-заземлитель, 8 - ведущий кабель, 10 - блок с источником тока, его преобразователем, генератором и аппаратурой приема и излучения гидроакустических сигналов, 12 - бортовая система управления СПА, 13 - бортовой источник энергии СПА, 14 - двигатель, 15 - движитель, 16 - приводы рулевых машинок, 17 - наружное оперение с рулями, 18 - навигационное оборудование со спутниковой, радио- или гидроакустической системой навигации, 19 - антенна спутниковой, радио- или гидроакустической системы навигации и связи, 20 - отсек полезной нагрузки СПА, 21 - вьюшка.
Навигационное оборудование морского района подводной навигационной системой с ведущим кабелем с применением самоходного аппарата и их функционирование осуществляются следующим образом (фиг. 1 и 2).
В расчетную точку доставляют на носителе (1) (надводном подводном или воздушном) СПА (2), производят его тестирование, вводят в бортовую систему управления маршрутное задание и по готовности выпускают в воду на заданный маршрут (3). С прибытием СПА в район укладки ведущего кабеля (4) производят его всплытие на поверхность, уточняют с помощью спутниковой, радио- или гидроакустической системы навигации географические координаты и направляют в точку начала постановки ведущего кабеля (5), в которой отдают якорь-заземлитель (7) с подсоединенным к нему ведущим кабелем (8), гидроакустическим датчиком (6) и в вариантном исполнении гидроакустическим маяком-ответчиком или гидроакустическим отметчиком. По мере движения СПА по маршруту вытравливают с вьюшки (21) ведущий кабель и укладывают его на грунт. В точке (9) отдают якорь-заземлитель ведущего кабеля (7) с подсоединенным к нему гидроакустическим датчиком (6) и в вариантном исполнении гидроакустическим маяком-ответчиком или гидроакустическим отметчиком, отделяют блок (10) с источником тока, генератором и аппаратурой для приема и излучения гидроакустических сигналов и направляют СПА к носителю для подъема на борт и возвращения на базу. Если возвращение СПА не планируется, например, при использовании воздушного носителя, блок (10) не отделяют и в точке (9) укладывают СПА на грунт.
Установленным гидроакустическим сигналом с СПА на гидроакустический датчик подводную навигационную систему приводят в действие и включают в дежурный режим. Гидроакустический маяк ответчик обеспечивает объекты навигации координатами, а гидроакустический отметчик - обозначает концы ведущего кабеля.
В режим вождения по трассе ведущего кабеля навигационную систему переключают с прибывшего в район объекта навигации установленным гидроакустическим сигналом. После проводки объекта навигации по трассе ведущего кабеля навигационную систему вновь переключают в дежурный режим.
Техническим результатом группы изобретений является способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления, позволяющие оперативно и скрытно от посторонних наблюдателей оборудовать навигационной системой с ведущим кабелем морские районы, в том числе отягощенные ледовой обстановкой, и обеспечивать в них проводку надводных и подводных плавсредств.
Изобретение относится к области морской техники, а именно созданию электромагнитных коридоров судовождения. На морское дно вдоль трассы проводки плавсредств укладывают подводную навигационную систему с ведущим кабелем (8). При этом укладку кабеля (8) и его оборудования производят самоходным подводным аппаратом (2), который доставляют в заданный район на надводном, подводном или воздушном носителе (1), производят его предстартовую подготовку, устанавливают в бортовую систему управления подводного аппарата маршрутное задание и по готовности выпускают в воду. При подходе подводного аппарата (2) к точке начала (5) постановки ведущего кабеля (8) производят его всплытие на поверхность, где уточняют с помощью спутниковой, радио- или гидроакустической системы навигации географические координаты подводного аппарата (2). В точке (5) отдают якорь-заземлитель (7) с подсоединенным к нему ведущим кабелем (8) и гидроакустическим датчиком (6), служащим для дистанционного включения и выключения системы ведущего кабеля по сигналу от объекта навигации. Ведущий кабель (8) укладывают на грунт по курсу обозначаемого маршрута. В конечной точке (9) завершают укладку ведущего кабеля (8), отдают якорь-заземлитель (7) ведущего кабеля с подсоединенным к нему гидроакустическим датчиком (6). После укладки ведущего кабеля (8) и сопутствующего оборудования подводный аппарат (2) с отделяемым блоком (10) с источником тока, генератором и аппаратурой для приема и излучения гидроакустических сигналов направляют к носителю (1) для подъема на борт и возвращения на базу, или укладывают на грунт в конечной точке без отделения блока (10). Также предложен самоходный подводный аппарат (2) с бортовой системой управления, энергосиловой установкой с источником энергии и двигателем, движителем, приводами рулевых машинок, стабилизаторами и рулями, обеспечивающими движение подводного аппарата по заданному маршруту, навигационным оборудованием, обеспечивающим работу подводного аппарата, со спутниковой, радио- или гидроакустической системой навигации, средствами радио- и звукоподводной связи с пунктом управления, носителем и объектами навигации, отсеком для полезной нагрузки с вьюшкой, с ведущим кабелем, с электронным блоком с усилителем, шифратором и дешифратором. Обеспечивается навигационное оборудование морских районов с возможностью укладки на дно вдоль трассы проводки плавсредств (надводных кораблей, судов, подводных лодок и аппаратов) подводной навигационной системы, создание электромагнитного коридора безопасного судовождения вдоль ведущего кабеля, связь подводного аппарата и выставленной им системы ведущего кабеля с носителем, пунктом управления и объектами навигации. 2 н.п. ф-лы, 2 ил.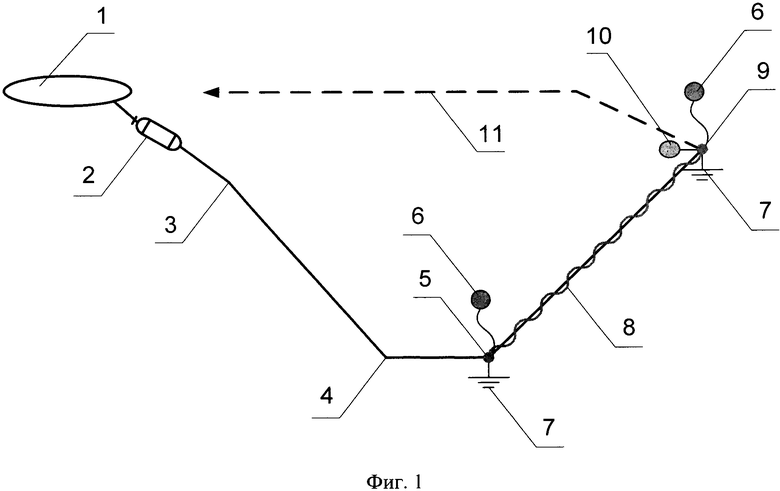
1. Способ навигационного оборудования морского района, при котором укладывают на дно вдоль трассы проводки плавсредств подводную навигационную систему с ведущим кабелем и создают электромагнитный коридор судовождения, отличающийся тем, что укладку ведущего кабеля и его оборудования производят самоходным подводным аппаратом, который доставляют в заданный район на надводном, подводном или воздушном носителе, производят его предстартовую подготовку, устанавливают в бортовую систему управления подводного аппарата маршрутное задание и по готовности выпускают в воду, при подходе подводного аппарата к точке начала постановки ведущего кабеля производят его всплытие на поверхность, где уточняют с помощью спутниковой, радио- или гидроакустической системы навигации географические координаты подводного аппарата и направляют его в точку начала постановки ведущего кабеля, в этой точке отдают якорь-заземлитель с подсоединенным к нему ведущим кабелем и гидроакустическим датчиком, служащим для дистанционного включения и выключения системы ведущего кабеля по сигналу от объекта навигации, вытравливают ведущий кабель с вьюшки и укладывают его на грунт по курсу обозначаемого маршрута, в конечной точке завершают укладку ведущего кабеля, отдают якорь-заземлитель ведущего кабеля с подсоединенным к нему гидроакустическим датчиком, отделяемый блок с источником тока, генератором и аппаратурой для приема и излучения гидроакустических сигналов, в вариантном исполнении в концевых точках ведущего кабеля дополнительно вместе с якорем-заземлителем устанавливают гидроакустический маяк-ответчик или гидроакустический отметчик, после укладки ведущего кабеля и сопутствующего оборудования подводный аппарат направляют к носителю для подъема на борт и возвращения на базу, или укладывают на грунт в конечной точке без отделения блока с источником тока, генератором и аппаратурой для приема и излучения гидроакустических сигналов.
2. Самоходный подводный аппарат, имеющий бортовую систему управления, энергосиловую установку с источником энергии и двигателем, движитель, приводы рулевых машинок, стабилизаторы и рули, обеспечивающие движение подводного аппарата по заданному маршруту, навигационное оборудование, обеспечивающее работу подводного аппарата, со спутниковой, радио- или гидроакустической системой навигации, средства радио- и звукоподводной связи с пунктом управления, носителем и объектами навигации, отсек для полезной нагрузки, отличающийся тем, что в отсеке для полезной нагрузки размещается оборудование подводной навигационной системы с ведущим кабелем, включающее устройство постановки ведущего кабеля с вьюшкой, ведущим кабелем, двумя гидроакустическими датчиками, двумя якорями с заземлителями, отделяемый или неотделяемый от подводного аппарата блок с источником тока, его преобразователем, генератором и аппаратурой приема и излучения гидроакустических сигналов, включающей электронный блок с усилителем, шифратором и дешифратором, обеспечивающий создание электромагнитного коридора судовождения вдоль ведущего кабеля и связь подводного аппарата и выставленной им системы ведущего кабеля с носителем, пунктом управления и объектами навигации, дополнительно к якорю-заземлителю могут крепиться гидроакустический маяк-ответчик или гидроакустический отметчик для обеспечения объектов навигации координатами и обозначения концов ведущего кабеля
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2011 |
|
RU2478059C1 |
| CN 106394837 A, 15.02.2017 | |||
| CN 104875867 A, 02.09.2015 | |||
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |

