Изобретение относится к электротранспорту, преимущественно к троллейбусам.
Известны штанговые токосъемники троллейбуса, см. интернет «Википедия», или Большую Советскую энциклопедию, том. «Т», стр.259.
Однако они обладают несколькими существенными недостатками. При движении троллейбуса с большой скоростью часто бывают искрение и сходы колодки с токопровода. Это связано с тем, что аэродинамическое сопротивление, воздействующее на штангу (здесь и далее рассматривается одна штанга), уменьшает усилие прижатия колодки к токопроводу вплоть до ее отрыва при больших скоростях или на неровностях дороги. Эта же ситуация еще более ухудшается, если троллейбус вынужден двигаться не точно под токопроводом, а в стороне от него - тогда на штангу дополнительно действует еще большее и направленное вбок аэродинамическое сопротивление.
Другой частый случай искрения и схода колодки с токопровода бывает при резком ускорении - при рывке троллейбуса вперед. В этом случае вредное влияние оказывает инерция штанги - при ускорении она стремится остаться на месте, и на ней возникает крутящий момент, направленный вниз и уменьшающий прижатие колодки. Как и в предыдущем случае, ситуация еще более ухудшается, если троллейбус находится в стороне от токопровода. Тогда инерция штанги приводит к ее развороту в продольное направление, и возникающие при этом усилия весьма значительны.
Задача и технический результат изобретения - компенсация указанных вредных аэродинамических и инерционных усилий, возникающих на штанге в упомянутых выше случаях.
ВАРИАНТ 1. Для компенсации продольного аэродинамического усилия на штанге размещена аэродинамическая поверхность, создающая подъемную силу.
ВАРИАНТ 2. Механизм осуществления этого способа следующий: на верхнем конце штанги расположено крыло, имеющее стреловидную форму, и имеющее в рабочем положении штанги положительный угол атаки к потоку 3-12 градусов (оптимально 5-7 градусов).
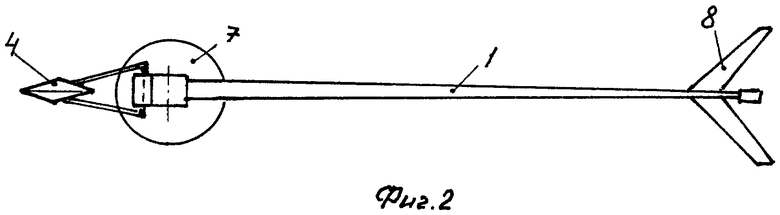
Крыло сделано стреловидным для того, чтобы при сходе штанги с токопровода поперечно расположенное крыло не сработало как крючок, рвущий подвеску токопровода и ломающийся сам. Для усиления этого эффекта крыло расположено не строго горизонтально, а так, что задние его концы находятся чуть ниже переднего, а передний конец крыла не выступает за передний габарит штанги. Для этого крыло может крепиться ниже штанги на пилоне, переходящем в хомутик, охватывающий штангу. См. фиг.1, 2 правая часть.
ВАРИАНТ 3. Для компенсации бокового аэродинамического сопротивления применен следующий способ - создание симметричного аэродинамического сопротивления, то есть впереди вертикальной оси вращения штанги (все направления даны относительно направления движения электротранспорта) расположена вертикально ориентированная аэродинамическая поверхность, жестко или подвижно в вертикальной плоскости связанная со штангой.
ВАРИАНТ 4. Для этого штанга имеет вид двуплечего рычага, одним концом которого является токосъемная ее часть, а другой конец рычага, на котором находится вертикально ориентированная аэродинамическая поверхность, направлен вперед-вверх (наподобие хоккейной клюшки), или же штанга подвижно соединена с таким рычагом, закрепленным подвижно на горизонтальной оси. См. фиг.1, 2 левая часть.
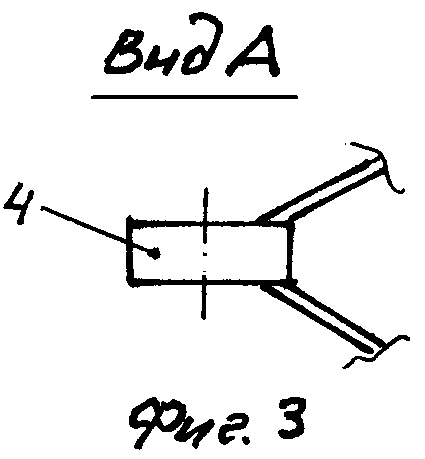
Наилучшим вариантом такой аэродинамической поверхности будет не крыльевая форма (в ее полярной характеристике будут пики и провалы), а форма, состоящая из двух круглых тупых конусов, соединенных основаниями, или в виде круглого цилиндра, высота которого относится к диаметру как 1:2-1:5 (примерно, как хоккейная шайба). См. фиг.1, 2, 3.
Причем последняя форма оказывает еще и заметное аэродинамическое сопротивление в продольном направлении, и это сопротивление оказывает прижимающее действие на штангу. То есть в этом случае крылья по варианту 2 могут быть меньше или отсутствовать совсем.
Аэродинамическое сопротивление, создаваемое вышеупомянутыми устройствами, незначительно по сравнению с сопротивлением самого троллейбуса.
ВАРИАНТ 5. Для компенсации вредных продольных инерционных нагрузок на штангу токоприемника применен способ, состоящий в том, что инерционные усилия на штанге компенсируются противоположно направленным движением другой массы, то есть штанга токосъемника кинематически соединена с грузом так, что при движении штанги назад или назад-вбок груз движется вперед или вперед-вбок, причем в другую сторону, и наоборот.
Для осуществления этого способа можно применить несколько десятков или сотен механизмов (в трехтомном справочнике Артоболевского для этого подойдет половина имеющихся механизмов - рычажные, кулисные, тросовые). Рассмотрим два наиболее целесообразных для этого механизма.
ВАРИАНТ 6. На вращающемся в горизонтальной плоскости основании на горизонтальных осях подвижно закреплены штанга с зубчатым колесом на нижнем конце, и направленный в рабочем положении вперед-вверх рычаг с грузом на верхнем конце и с зубчатым колесом на нижнем конце, причем их зубчатые колеса находятся в зацеплении (см. фиг.1, 2).
Зубчатые колеса могут быть не сплошными, а только их секторы в рабочем диапазоне отклонений штанги. Причем зубчатые колеса могут быть не одинаковыми - на рычаге с грузом зубчатое колесо может быть в 1,5-2 раза меньшего радиуса (правильнее было бы о зубчатом колесе сказать - с меньшим числом зубьев, но в том-то и дело, что количество контактирующих зубьев на секторах обоих колес должно быть одинаковым).
Такой механизм работает следующим образом: при движении штанги назад под действие ускорения троллейбуса она своим зубчатым колесом отклоняет груз на рычаге вперед, то есть против сил инерции груза. Благодаря этому суммарное воздействие инерции на штангу устраняется или значительно уменьшается. Можно сказать иначе - груз, отклоняясь при разгоне троллейбуса назад, через шестерни прижимает штангу к токопроводу.
На штанге, повернутой на какой-то угол вбок, во время разгона троллейбуса возникает усилие, возвращающее ее в продольную плоскость. А на рычаге с грузом возникает усилие, наоборот - отклоняющее его дальше вбок. Так как груз и штанга связаны через общее горизонтальное вращающееся основание, то эти два усилия полностью или частично компенсируются.
Этот механизм можно задействовать как «два в одном», то есть совместить инерционную компенсацию с ветровой компенсацией. Для этого грузу надо придать соответствующего размера форму, упомянутую в варианте 4. Как и в варианте 4 цилиндрическая форма груза позволит уменьшить крыло на штанге или совсем от него отказаться.
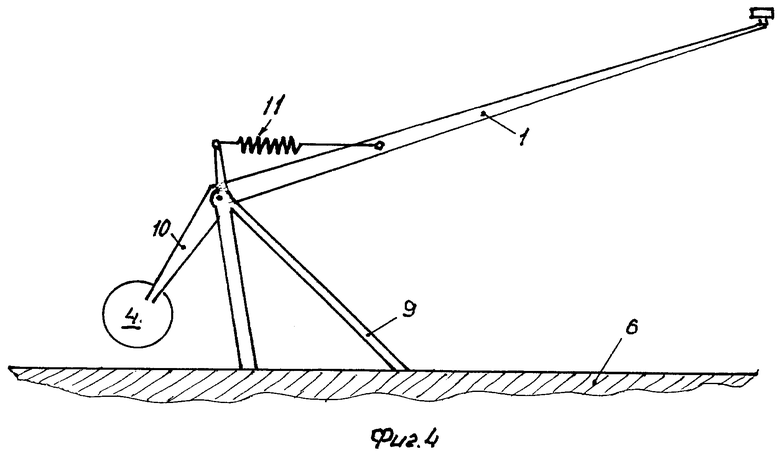
ВАРИАНТ 7. Так как высота токоведущей сети, как правило, выдерживается с достаточной точностью, то можно применить следующий механизм: на крыше троллейбуса имеется кронштейн (высотой примерно 30-50% от расстояния до токопровода), на котором подвижно в двух плоскостях (например, на шарнире Гука) закреплена штанга в виде двуплечего рычага, одним концом которого является сама штанга, а другой конец имеет груз и направлен вперед-вниз (тоже как хоккейная клюшка, только направленная вниз).
Этот вариант хорош тем, что сами штанги при желании могут быть сделаны короче, а механизм получается предельно простой.
Груз механизма, как и в варианте 6, может иметь форму, указанную в варианте 4. Тогда этот механизм будет компенсировать и ветровые нагрузки.
На фиг.1, 2, 3 показан механизм, осуществляющий все три способа. Он состоит из штанги 1 с сектором зубчатого колеса 2 на нижнем конце, и из рычага 3 с грузом 4, являющимся одновременно аэродинамическим сопротивлением, на верхнем конце и с сектором зубчатого колеса 5 на нижнем конце. Все это установлено на крыше троллейбуса 6 на горизонтально вращающемся основании 7. Груз может иметь вид, как на фиг.2, или как на фиг.3. На верхнем конце штанги имеется стреловидное крыло 8.
Работает механизм так: груз, отклоняясь при разгоне троллейбуса назад, через шестерни прижимает штангу к токопроводу. А также компенсирует инерцию при боковом положении штанги.
На фиг.4 показан механизм по варианту 7. Он состоит из кронштейна 9, на котором на шарнире Гука («крестовине») закреплена штанга 1 с рычагом 10 и грузом 4. Показана также пружина штанги 11.
Работает этот вариант так: при разгоне троллейбуса штанга 1 стремится опуститься вниз, а груз 4 поднимает ее вверх. А также компенсирует инерцию при боковом положении штанги.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА (ВАРИАНТЫ) | 2010 |
|
RU2418713C1 |
| ВЕЛОСИПЕДНОЕ ШАССИ | 2012 |
|
RU2494011C1 |
| ОСКОЛОЧНЫЙ БОЕПРИПАС СТАРОВЕРОВА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ПРИМЕНЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2472098C1 |
| Штурмовик - 2 (варианты) | 2017 |
|
RU2655588C1 |
| КРЫЛО СТАРОВЕРОВА (ВАРИАНТЫ) | 2011 |
|
RU2480375C1 |
| КОСМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) И АЛГОРИТМ ЕГО РАБОТЫ | 2012 |
|
RU2503592C1 |
| КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ /ВАРИАНТЫ/ | 2014 |
|
RU2557873C1 |
| ГИДРОСАМОЛЕТ /ВАРИАНТЫ/ | 2013 |
|
RU2513345C1 |
| ШАССИ ДЛЯ ПОСАДКИ ПРИ БОКОВОМ ВЕТРЕ (ВАРИАНТЫ) | 2011 |
|
RU2471675C1 |
Изобретение относится к электротранспорту. Для компенсации продольного аэродинамического усилия на штанге размещена аэродинамическая поверхность, создающая подъемную силу - стреловидное крыло с углом атаки 3-12 градусов. Для компенсации бокового аэродинамического сопротивления применен следующий способ - создание симметричного аэродинамического сопротивления. Для этого штанга имеет вид двуплечего рычага, одним концом которого является токосъемная ее часть, а другой конец рычага, на котором находится вертикально ориентированная аэродинамическая поверхность, направлен вперед-вверх. Для компенсации вредных продольных инерционных нагрузок на штангу токоприемника применен способ, состоящий в том, что инерционные усилия на штанге компенсируются противоположно направленным движением другой массы. Возможны различные варианты такого механизма, например на вращающемся в горизонтальной плоскости основании на горизонтальных осях подвижно закреплены штанга с зубчатым колесом на нижнем конце, и направленный в рабочем положении вперед-вверх рычаг с грузом на верхнем конце и с зубчатым колесом на нижнем конце, причем их зубчатые колеса находятся в зацеплении. Или на крыше троллейбуса имеется кронштейн, на котором подвижно в двух плоскостях закреплена штанга в виде двуплечего рычага. Технический результат заключается в обеспечении надежности токосъема в широком диапазоне вредных нагрузок. 7 н. и 3 з.п. ф-лы, 4 ил.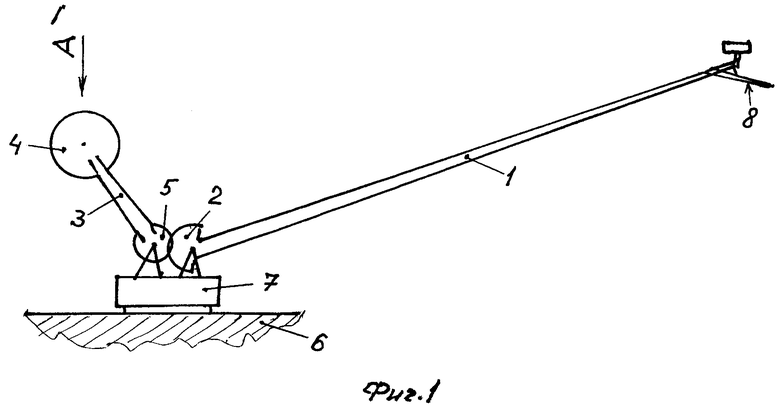
1. Способ компенсации вредных нагрузок троллейбусного токосъемника, отличающийся тем, что на штанге размещена аэродинамическая поверхность, создающая подъемную силу.
2. Механизм осуществления способа по п.1, отличающийся тем, что на верхнем конце штанги расположено крыло, имеющее стреловидную форму и имеющее в рабочем положении штанги положительный угол атаки к потоку 3-12 градусов.
3. Механизм по п.2, отличающийся тем, что крыло расположено так, что задние его концы находятся ниже переднего, а передний конец крыла не выступает за передний габарит штанги.
4. Способ компенсации вредных нагрузок троллейбусного токосъемника, отличающийся тем, что создается симметричное аэродинамическое сопротивление, то есть впереди вертикальной оси вращения штанги расположена вертикально ориентированная аэродинамическая поверхность, жестко или подвижно в вертикальной плоскости связанная со штангой.
5. Механизм осуществления способа по п.4, отличающийся тем, что штанга имеет вид двуплечего рычага, одним концом которого является токосъемная ее часть, а другой конец рычага, на котором находится вертикально ориентированная аэродинамическая поверхность, направлен вперед-вверх, или же штанга подвижно соединена с таким рычагом, закрепленным подвижно на горизонтальной оси.
6. Механизм по п.5, отличающийся тем, что упомянутая аэродинамическая поверхность выполнена в виде двух круглых тупых конусов, соединенных основаниями, или в виде круглого цилиндра, высота которого относится к диаметру как 1:2-1:5.
7. Способ компенсации вредных нагрузок троллейбусного токосъемника, отличающийся тем, что инерционные усилия на штанге компенсируются противоположно направленным движением другой массы, то есть штанга токосъемника кинематически соединена с грузом так, что при движении штанги назад или назад-вбок груз движется вперед или вперед-вбок, причем в другую сторону, и наоборот.
8. Механизм осуществления способа по п.7, отличающийся тем, что на вращающемся в горизонтальной плоскости основании на горизонтальных осях подвижно закреплены штанга с зубчатым колесом на нижнем конце и направленный в рабочем положении вперед-вверх рычаг с грузом на верхнем конце и с зубчатым колесом на нижнем конце, причем их зубчатые колеса находятся в зацеплении.
9. Механизм по п.8, отличающийся тем, что на рычаге с грузом зубчатое колесо может быть в 1,5-2 раза меньшего радиуса.
10. Механизм осуществления способа по п.7, отличающийся тем, что на крыше троллейбуса имеется кронштейн, на котором подвижно в двух плоскостях закреплена штанга в виде двуплечего рычага, одним концом которого является сама штанга, а другой конец имеет груз и направлен вперед-вниз.
| Устройство для коррекции свободного гироскопа | 1938 |
|
SU58994A1 |
| ТОКОПРИЕМНИК ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2368513C1 |
| RU 122615 U1, 10.12.2012 | |||
| DE 19652367 A1, 16.06.1998 | |||

