Область техники
Изобретение относится к способу мониторинга контроллера трехфазного электродвигателя и/или мониторинга электродвигателя, в частности асинхронного или синхронного электродвигателя.
Уровень техники
На уровне техники известно применение откачивающих насосов с однофазными электродвигателями с расщепленными полюсами в посудомоечных машинах. Эти двигатели рассчитаны на дискретную рабочую точку, и на них непосредственно подается напряжение электрической сети. Сбой единственной фазы приводит к остановке и может быть немедленно распознан по отсутствию тока фазы.
Раскрытие изобретения
Задачей изобретения является разработка способа, который позволит осуществлять проверку работоспособности контроллера электродвигателя и/или проверку работоспособности электродвигателя, в частности, в бытовом приборе. В частности, должен использоваться электродвигатель, который отличается большей универсальностью по сравнению с упомянутым электродвигателем с расщепленными полюсами.
Согласно изобретению эта задача решается способом мониторинга контроллера трехфазного электродвигателя и/или способом мониторинга электродвигателя, в частности асинхронного или синхронного электродвигателя, который содержит, по меньшей мере, следующие этапы:
- измерение двух фазных токов (ia, ib),
- проверка того, имеет ли один из двух измеренных фазных токов (ia, ib) значение, по существу, равное нулю,
- генерация сигнала ошибки, если, по меньшей мере, один из двух измеренных фазных токов (ia, ib), по существу, равен нулю,
- проверка того, имеют ли два измеренных фазных тока (ia, ib) значения, по существу, отличные от нуля,
- образование суммы двух измеренных фазных токов (ia, ib),
- генерация сигнала ошибки, если полученная сумма двух измеренных фазных токов (ia, ib), по существу, равна нулю.
В описываемой здесь системе измеренные токи проверяются в отношении возможной ошибочной комбинации на предмет того, что один из измеренных токов равен нулю, а другие токи не равны нулю, и/или сумма измеренных токов, по существу, равна нулю. Если выполняется, по меньшей мере, одно из условий, то выводится сигнал ошибки, который показывает, что контроллер и/или электродвигатель не работает надлежащим образом.
При этом следует заметить, что при отсутствии фазы фазный ток в отсутствующей фазе равен нулю, а в двух других фазах противоположные токи имеют одинаковую величину (противопоставление фаз). Так как оба фазных тока являются синусоидальными токами, которые каждые 180° переходят через ноль, и так как даже трехфазные токи каждые 180° переходят через ноль, способ, предлагаемый изобретением, должен учитывать, что «нулевое значение» допустимо в течение известного периода и не может служить основой для вынесения суждения о работоспособности. Кроме того, упомянутое измерение фазных токов также имеет допуски, то есть, предпочтительно, определены границы (первое поле допуска), внутри которых допускается фазный ток, равный нулю. Также заданы границы (второе поле допуска), в которые должна укладываться разность двух фазных токов, чтобы можно было идентифицировать оба фазных тока как противоположные друг другу. Согласно способу, предлагаемому изобретением, достаточно измерить лишь два из трех фазных токов, так как три обмотки синхронного электродвигателя включены по схеме «звезда». Так как суммарный ток точки звезды схемы соединения звездой равен нулю, на основании двух измеренных фазных токов можно рассчитать полную трехфазную систему, то есть, можно рассчитать отсутствующий фазный ток (ток обмотки). Если фаза отсутствует, необходимо различать, имеется ли в соответствующей обмотке один из двух измерителей тока, выполняющих измерение токов, или речь идет об обмотке, не имеющей измерителя тока.
Предпочтительно, второй счетчик увеличивает свое значение, когда первый счетчик многократно превышает первое предельное (задаваемое) значение в течение определенного промежутка времени.
Предпочтительно, отсутствие, по меньшей мере, одного фазного тока, то есть сбой, по меньшей мере, одной фазы асинхронного или синхронного электродвигателя, распознается тогда, когда второй счетчик превышает второе, в частности, задаваемое предельное значение. Такой способ обеспечивает высокую надежность распознавания отсутствия, по меньшей мере, одной фазы синхронного электродвигателя.
В частности, второй счетчик может увеличить свое значение, а таймер может быть запущен тогда, когда первый счетчик превысит первое предельное значение. Предпочтительно, первый счетчик сбрасывается, когда он превышает первое предельное значение. Второй счетчик, в частности, продолжает прирастать, если в течение определенного периода первый счетчик, по меньшей мере, еще один раз превысит первое предельное значение. В зависимости от достоверности определения можно предусмотреть, что первый счетчик должен был превысить первое предельное значение не только еще один раз, но более двух раз. Под упомянутым определенным периодом понимается, в частности, задаваемое время отсчета упомянутого таймера.
Кроме того, изобретение относится к устройству для мониторинга работоспособности электродвигателя бытового прибора, в частности к устройству для осуществления описанного выше способа, причем электродвигатель представляет собой трехфазный синхронный электродвигатель с тремя обмотками, включенными по схеме «звезда», и с возбуждением от постоянных магнитов и оснащен полевым векторным регулятором, причем измерительное устройство измеряет два фазных тока, а детекторная схема использует результаты измерений для контроля частоты вращения синхронного электродвигателя и/или для контроля наличия всех фазных токов в обмотках синхронного электродвигателя.
Кроме того, изобретение относится к бытовому прибору, в частности посудомоечной или стиральной машине, который оснащен устройством вышеупомянутого типа.
Краткое описание чертежей
Изобретение иллюстрируется фигурами, на которых изображено:
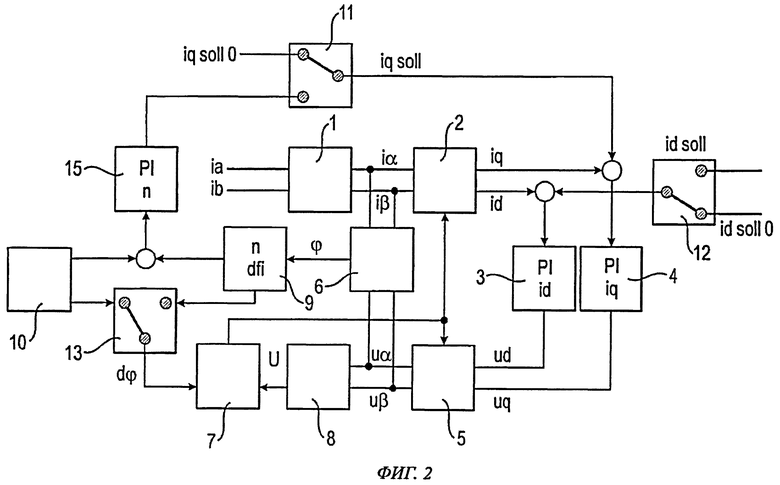
Фигура 1: блок-схема, обеспечивающая мониторинг работоспособности синхронного электродвигателя.
Фигура 2: эквивалентная схема векторного регулятора для трехфазного синхронного электродвигателя с возбуждением от постоянных магнитов.
Осуществление изобретения
Изобретение основывается на трехфазном синхронном электродвигателе с тремя обмотками и с возбуждением от постоянных магнитов, установленном в бытовом приборе, в частности в посудомоечной или стиральной машине, причем синхронный электродвигатель служит, например, приводом насоса бытового прибора, в частности откачивающего и/или циркуляционного насоса.
На фигуре 1 показаны три обмотки 100, 101 и 102 трехфазного синхронного электродвигателя 108 с тремя обмотками и с возбуждением от постоянных магнитов, причем три обмотки 100-102 соединены в точке 103 звезды. К обмоткам 100 и 101 присоединено по одному измерителю 104, 105 тока, которые измеряют соответствующие фазные токи ia, ib. Фазные токи ia, ib с помощью устройства 106 переводятся, в частности, трансформируются в токи iα, iβ компонентов. Два фазных тока ia, ib и/или два тока iα, iβ компонентов подаются на детекторную схему 107, которая выполняет мониторинг частоты n вращения синхронного электродвигателя 108 и/или мониторинг наличия всех трех фазных токов в трех обмотках 100, 101, 102 синхронного электродвигателя 108. Так как суммарный ток в точке 103 звезды равен нулю, достаточно измерить фазные токи ia, ib только в двух обмотках 100, 101. Ток в обмотке 102 можно рассчитать. Для уточнения терминологии следует заметить, что «обмотки» упоминаются, когда речь идет о физической системе, а «фазы» - когда речь идет о генерации системы напряжений.
Управление синхронным электродвигателем 108 осуществляется с помощью так называемого полевого векторного регулятора. При этом два фазных тока ia, ib используются для того, чтобы с учетом модели синхронного электродвигателя 108 можно было управлять этим двигателем с помощью трехфазной системы напряжений с широтно-импульсной модуляцией. Эта система напряжений позволяет настраивать частоту, фазовый угол и амплитуду. Соответственно, питание синхронного электродвигателя 108 осуществляется с помощью так называемого модулятора.
Токи ia, ib обмоток, которые могут также называться фазными токами, измеряются (как уже говорилось) с помощью двух измерителей 104, 105 тока. Оба измерителя 104, 105 тока содержат по одному шунтирующему резистору, причем падение напряжения, имеющее место на соответствующем шунтирующем резисторе, прямо пропорционально соответствующему фазному току ia, ib.
Фигура 2 иллюстрирует регулирующий контур полевого векторного регулятора с помощью эквивалентной схемы регулятора. В трехфазной системе токов с токами, смещенными на 120°, измеряются два фазных тока ia, ib. Это выполняется с помощью измерителей 104, 105 тока (см. фиг.1). С помощью трансформации Кларка, имеющей обозначение 1 (устройство 106 на фигуре 1), два реальных фазных тока ia, ib, смещенных на 120°, преобразуются в сложную ортогональную систему координат, ориентированную на статор. Это означает, что теперь имеется двухфазная 90°-система, которая содержит токи iα, iβ компонентов. Два этих тока iα, iβ компонентов поворачиваются на роторный угол φ в систему координат ротора с помощью трансформации Парка, имеющей обозначение 2. В результате образуются повернутые компоненты id, iq тока, причем id соответствует току возбуждения, а iq - току синхронного электродвигателя, образующему крутящий момент. Эти компоненты id, iq тока в последующих каскадах 3, 4 пи-регулятора доводятся до различных заданных значений id soll и iq soll. После этого происходит обратная трансформация, которая имеет обозначение 5 и выдает на выходе компоненты uα, uβ напряжения для модели 6 двигателя, а также амплитуды для модулятора 7. Под модулятором 7 подразумевается элемент, который способен генерировать трехфазную систему напряжений с широтно-импульсной модуляцией и настраиваемой частотой, фазовым углом и амплитудой. Такой модулятор 7 также называется преобразователем. Для формирования амплитуды компонентов uα, uβ напряжения на входе модулятора 7 предусмотрено устройство 8 получения абсолютных чисел. Упомянутый ранее роторный угол φ (угол выбега ротора) не измеряется непосредственно на синхронном электродвигателе 108, а рассчитывается с помощью модели 6 двигателя на основании компонентов iα, iβ тока и компонентов uα, uβ напряжения. Модель 6 двигателя имитирует синхронный электродвигатель 108. На основании дифференцирования роторного угла по времени рассчитывается частота n вращения. Этот процесс обозначается цифрой 9. На основании частоты n вращения, зная дискретные периоды модуляции, рассчитывается текущее угловое положение для модулятора 7. Поскольку в момент пуска синхронного электродвигателя 108 информация о токе и частоте вращения отсутствует, синхронный электродвигатель 108 запускается в управляемом режиме. Для этого предусмотрена линейная модель 10, которая, получив начальную крутизну характеристики, выдает текущую заданную частоту вращения и текущее угловое положение. Заданные значения обоих компонентов id, iq тока являются фиксированными. На фигуре 2 показаны три переключателя 11, 12, 13, которые занимают на фигуре положение, необходимое для пуска синхронного электродвигателя 108. Когда синхронный электродвигатель 108 запущен, они переключаются. При пуске модулятор 7 проходит таблицу синусов с целью создания шаблона выходного напряжения с угловым приращением характеристики линейной модели 10 и амплитудой на основании регулирующих контуров пусковых заданных значений тока. По достижении заданной частоты n вращения, при которой могут быть надежно измерены фазные токи ia, ib и может быть надежно рассчитана модель 6 двигателя, производится переключение из управляемого режима в регулируемый режим. Это означает, что переключатели 11-13 переключаются, и возникает точка синхронизации. Регулятор 15 частоты вращения, выполненный в виде пи-регулятора, рассчитывает на основании имеющегося отклонения частоты вращения заданное значение iq soll компонента iq тока, образующего крутящий момент. Компонент id тока возбуждения сводится к нулю.
В отношении измерения фазных токов iα, iβ следует заметить, что они измеряются с помощью двух шунтирующих резисторов измерителей 104, 105 тока в основаниях обмоток синхронного электродвигателя 108. В модуляторе 7, в частности, реализована полумостовая схема. Падение напряжения на обоих шунтирующих резисторах с помощью двух быстродействующих усилительных схем приводится в соответствие с диапазоном измерения напряжения микроконтроллером, который составляет от 0 до 5 В. Усилительные схемы имеют идентичную структуру и рассчитаны таким образом, чтобы измерение тока могло выполняться без задержек с шагом широтно-импульсной модуляции. Поскольку на обоих основаниях необходимо измерять положительные и отрицательные токи одинаковой амплитуды, каждая из усилительных схем имеет напряжение смещения, находящееся в середине возможного диапазона регулирования. Соответствующее напряжение смещения всегда измеряется при остановленном двигателе и проверяется на достоверность. Чтобы свести к минимуму влияние помех, напряжения смещения фильтруются с помощью КВ-фильтра нижних частот. В случае недостоверного напряжения смещения программное обеспечение преобразователя переходит в состояние ошибки, в котором активизация насоса невозможна.
Сканирование фазных токов ia, ib выполняется в режиме прерывания и осуществляется с частотой широтно-импульсной модуляции широтно-импульсного модулятора преобразователя. Момент выборки находится в середине процесса активизации трех мощных полупроводниковых Lowside-приборов преобразователя. В этот момент три обмотки синхронного электродвигателя 108 замыкаются накоротко через мощный полупроводниковый прибор, и можно измерить ток свободного хода обмоток двигателя. Так как сканирование запускается точно в середине импульса, влияние помех, обусловленных синхронизирующим фронтом сигнала широтно-импульсной модуляции, сводится к минимуму. Во время одного цикла широтно-импульсной модуляции всегда измеряется только один ток. Оба тока измеряются со смещением на время цикла широтно-импульсной модуляции до расчета модели двигателя. При этом предполагается, что ток в фазах синхронного электродвигателя не изменяется во время цикла широтно-импульсной модуляции. Частота широтно-импульсной модуляции выбирается таким образом, чтобы выполнялось это условие. Измерение токов выполняется с разрешением аналого-цифрового преобразователя 10 бит. При таком разрешении отображается двойная амплитуда фазных токов.
Модуляция выходного напряжения преобразователя реализована методом таблицы соответствий (LUT). Текущий угол выходного напряжения сохраняется в аккумуляторе фазы (16 бит) и корректируется каждые 600 мкс с помощью регулирующего алгоритма. Между коррекциями угол модуляции продолжает перемещаться с постоянной угловой скоростью. LUT имеет разрешение 16 бит и 256 опорных точек и заложена в память контроллера. Обновление значений широтно-импульсной модуляции выполняется в каждом втором цикле широтно-импульсной модуляции. Выходное напряжение корректируется с помощью напряжения промежуточного контура преобразователя при каждом расчете значения модуляции. Таким образом, можно в максимально возможной степени компенсировать влияние скачков напряжения в промежуточном контуре преобразователя.
Как уже упоминалось, этап трансформации выполняется во время так называемого полевого векторного регулирования, чтобы перевести фазные токи ia, ib в токи iα, iβ компонентов. На этом этапе трансформации выполняются исключительно алгебраические операции, а модель отсутствует. Как уже упоминалось, токи iα, iβ компонентов описывают трехфазную систему токов в ортогональной системе координат. На основании двух токов iα, iβ компонентов рассчитывается угол относительно статора. Измерение периодически повторяется. Предпочтительно, периодичность выбирается таким образом, чтобы она удовлетворяла требованиям к распознаванию ошибок. На основании текущих измерений путем дифференцирования угла по времени рассчитывается угловая скорость и, как следствие, частота n вращения синхронного двигателя 108. Предпочтительно, образуется разность соседних углов и разность соседних моментов времени, и в целях дифференцирования разность углов делится на разность моментов времени.
Так как шаблоны токов могут быть отклонены, вследствие чего может измениться временная привязка двух шаблонов токов ia, ib и снизиться точность измерения в нижнем диапазоне частоты вращения, может быть предусмотрена, предпочтительно, фильтрация частоты вращения. Выгодной альтернативой фильтрации является применение критериев выбора. Если у-значения х-значений соответствуют шаблону, то результат считается истинным.
Как уже упоминалось, три обмотки 100-102 синхронного электродвигателя 1008 включены по схеме «звезда». Так как суммарный ток точки звезды равен нулю, достаточно измерить две из трех обмоток (см. пояснения к фигуре 1). В случае отсутствия фазы, то есть фазного тока этой фазы, следует различать, установлен ли в этой фазе один из двух измерителей тока, или речь идет о неизмеряемой фазе. Таким образом, следует проверить наличие в этой фазе одного из двух измерителей 104, 105 тока.
Ток в отсутствующей фазе, то есть в соответствующей обмотке, равен нулю, а в двух других фазах/обмотках противоположные токи имеют одинаковую величину. Происходит так называемое противопоставление фаз. Так как оба фазных тока ia, ib являются синусоидальными токами, которые каждые 180° переходят через ноль, и так как даже трехфазные токи каждые 180° переходят через ноль, при измерении нулевого тока следует учитывать, что он допустим в течение известного периода. Измерение токов с помощью измерителей 104, 105 также имеет допуски, то есть должны быть определены известные границы, внутри которых допускается фазный ток, равный нулю. Также необходимо задать границы, в которые может укладываться разность двух токов, чтобы можно было идентифицировать оба тока как противоположные друг другу. В первом случае в качестве границ определено первое поле допуска, а во втором случае - второе поле допуска. Для мониторинга полноты фаз синхронного электродвигателя 108, то есть наличия сбоя, по меньшей мере, одной фазы синхронного электродвигателя 108, оба измеренных тока ia, ib проверяются на наличие следующих возможных ошибочных комбинаций: а) если один из измеренных фазных токов ia, ib укладывается в первое поле допуска, то этот фазный ток принимается равным нулю; b) если разность двух измеренных фазных токов ia, ib укладывается во второе поле допуска, оба измеренных фазных тока принимаются как противоположные друг другу в противопоставлении фаз.
На этапе а) проверяется, не находится ли один из двух токов ia, ib ниже границы нулевого тока, определенной первым полем допуска. На этапе b) проверяется, не находится ли разность измеренных токов ia, ib ниже границы противопоставления фаз, определенной вторым полем допуска.
Следует заметить, что распознавание нулевого тока в принципе проще распознавания противопоставления фаз. При наступлении одного из двух указанных событий значение первого счетчика прирастает, в частности увеличивается, в степени, зависящей от вида события. Если при измерении не выполняется ни первый, ни второй критерий, первый счетчик сбрасывается.
Если значение этого первого счетчика превышает первое предельное значение, то значение второго счетчика увеличивается, а первый счетчик сбрасывается. Кроме того, запускается таймер. Если в течение определенного времени, в частности заданного времени отсчета таймера, произойдет повторное или по меньшей мере одно повторное превышение первого предельного значения первого счетчика, то значение второго счетчика увеличится еще больше. Если этого не произойдет, второй счетчик будет сброшен. Если значение второго счетчика превысит второе предельное значение, то будет распознан сбой фазы, то есть отсутствие фазного тока в обмотке 100, 101, 102.
По существу, о способе определения частоты вращения можно сказать, что для этого используются токи iα, iβ компонентов, полученные на этапе трансформации полевого векторного регулирования, без формирования какой-либо модели. Расчет углов относительно статора всегда выполняется, по меньшей мере, в два определенных момента времени, причем разность моментов времени должна удовлетворять лишь требованиям к точности для распознавания состояния покоя (с учетом последующей фильтрации/анализа). Расчет частоты вращения (приближенной частоты вращения) вытекает из дифференцирования угла во времени. Кроме того, выполняется оценка информации о частоте вращения (в частности, значения частоты вращения у из х в пределах поля допуска).
При проверке полноты фаз выполняется измерение двух фазных токов синхронного электродвигателя, включенного по схеме «звезда». Соразмерное увеличение значения первого счетчика выполняется в том случае, если ток находится ниже границы нулевого тока или разность двух токов лежит в пределах границ противопоставления фаз. Значение второго счетчика увеличивается, если первый счетчик в течение определенного периода многократно превышает свое первое предельное значение. Сбой фазы распознается, если второй счетчик превышает определенное для него второе предельное значение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ЗАГРУЗКИ НАСОСА | 2009 |
|
RU2529652C2 |
| СПОСОБ БЕЗДАТЧИКОВОГО ОПРЕДЕЛЕНИЯ НАЧАЛЬНОГО ПОЛОЖЕНИЯ РОТОРА СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2015 |
|
RU2594358C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЁХФАЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2017 |
|
RU2735092C2 |
| СПОСОБ ДИАГНОСТИКИ ВИТКОВЫХ ЗАМЫКАНИЙ В ОБМОТКЕ РОТОРА СИНХРОННОГО ГЕНЕРАТОРА | 2016 |
|
RU2629708C1 |
| СПОСОБ ИЗМЕРЕНИЯ РЕАКТИВНОЙ МОЩНОСТИ В ТРЕХФАЗНОЙ СИММЕТРИЧНОЙ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ | 2016 |
|
RU2629907C1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1661925A1 |
| СПОСОБ ИЗМЕРЕНИЯ АКТИВНОЙ МОЩНОСТИ В ТРЕХФАЗНОЙ СИММЕТРИЧНОЙ СЕТИ | 2018 |
|
RU2689994C1 |
| Способ управления синхронным электродвигателем на постоянных магнитах | 2018 |
|
RU2683586C1 |
| ВЫСОКОВОЛЬТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ ПУСКА И РЕГУЛИРОВАНИЯ СКОРОСТИ МОЩНОГО ЭЛЕКТРОДВИГАТЕЛЯ, ИМЕЮЩЕГО ОДНУ ИЛИ НЕСКОЛЬКО ТРЕХФАЗНЫХ ОБМОТОК (ЕГО ВАРИАНТЫ) | 2005 |
|
RU2295824C1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
Изобретение относится к области электроники и электротехники, в частности к способу мониторинга контроллера трехфазного электродвигателя и/или электродвигателя. Способ мониторинга предполагает измерение двух фазных токов (ia, ib), проверку того, имеет ли один из двух измеренных фазных токов (ia, ib) значение, по существу, равное нулю, генерацию сигнала ошибки, если, по меньшей мере, один из двух измеренных фазных токов (ia, ib), по существу, равен нулю, проверку того, имеют ли два измеренных фазных тока (ia, ib) значения, по существу, отличные от нуля, образование суммы двух измеренных фазных токов (ia, ib), генерацию сигнала ошибки, если полученная сумма двух измеренных фазных токов (ia, ib), по существу, равна нулю. При этом при появлении сигнала ошибки увеличивают значение первого счетчика, затем увеличивают значение второго счетчика, если первый счетчик в течение определенного периода многократно превышает свое первое предельное значение. Затем распознают отсутствие, по меньшей мере, одного из трех фазных токов в том случае, если второй счетчик превышает второе предельное значение. Бытовой прибор, в частности посудомоечная или стиральная машина, содержит электродвигатель и устройство для мониторинга работоспособности электродвигателя. Технический результат изобретения - повышение надежности распознавания повреждений электродвигателя. 2 н. и 5 з.п. ф-лы, 2 ил.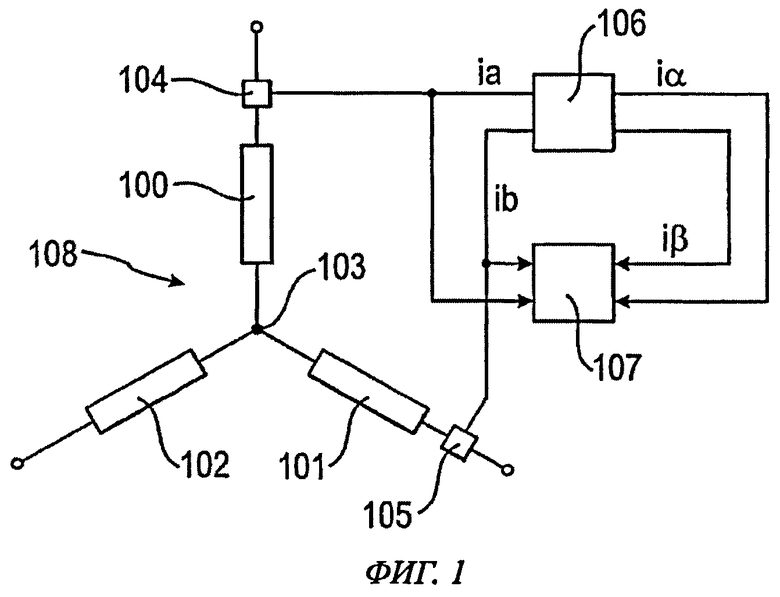
1. Способ мониторинга контроллера трехфазного электродвигателя и/или мониторинга электродвигателя, в частности асинхронного или синхронного электродвигателя, который содержит, по меньшей мере, следующие шаги:
- шаг измерения двух фазных токов (ia, ib),
- шаг проверки того, имеет ли один из двух измеренных фазных токов (ia, ib) значение, по существу, равное нулю,
- шаг генерации сигнала ошибки, если, по меньшей мере, один из двух измеренных фазных токов (iа, ib), по существу, равен нулю,
- шаг проверки того, имеют ли два измеренных фазных тока (ia, ib) значения, по существу, отличные от нуля,
- шаг образования суммы двух измеренных фазных токов (ia, ib),
- шаг генерации сигнала ошибки, если полученная сумма двух измеренных фазных токов (ia, ib), по существу, равна нулю, причем
- при появлении сигнала ошибки увеличивают значение первого счетчика, увеличивают значение второго счетчика, если первый счетчик в течение определенного периода многократно превышает свое первое предельное значение,
- распознают отсутствие, по меньшей мере, одного из трех фазных токов в том случае, если второй счетчик превышает второе предельное значение.
2. Способ по п.1, отличающийся тем, что значение второго счетчика увеличивают, а таймер запускают тогда, когда первый счетчик превышает первое предельное значение.
3. Способ по одному из пп.1-2, отличающийся тем, что первый счетчик сбрасывают, когда он превышает первое предельное значение.
4. Способ по одному из пп.1-2, отличающийся тем, что значение второго счетчика увеличивают еще больше, когда первый счетчик в течение определенного периода, по меньшей мере, еще один раз превышает первое предельное значение.
5. Способ по п.4, отличающийся тем, что определенный период представляет собой задаваемое время отсчета таймера.
6. Способ по одному из пп.1, 2 или 5, отличающийся тем, что электродвигатель используют для работы бытового прибора, в частности, посудомоечной или стиральной машины.
7. Бытовой прибор, в частности посудомоечная или стиральная машина, которая, по меньшей мере, содержит электродвигатель и устройство для мониторинга работоспособности электродвигателя согласно способу по одному или нескольким из предыдущих пунктов.
| JP 2005094912 A, 07.04.2005 | |||
| JP 2008263692 A, 30.10.2008 | |||
| US 20050099743 A1, 12.05.2005 | |||
| US 20030222612 A1, 04.12.2003 | |||
| US 5350988 A, 27.09.1994 | |||
| Устройство для защиты трехфазной сети от обрыва фазы | 1975 |
|
SU573836A1 |
| US 6822416 B1, 23.11.2004 | |||
| JP 2007089261 A1, 05.04.2007 | |||
| JP 2005312201 A, 04.11.2005 | |||

