Изобретение относится к области авиационной техники и касается создания многовинтовых конвертируемых и беспилотных скоростных вертолетов, снабженных системой распределенной тяги разновеликих винтов по схеме X3+2, имеющей смонтированные как на вертикальных пилонах три больших из них на концах переднего крыла и тонкой хвостовой балке соответственно два передних винта и один задний, так и с изменяемым вектором тяги два меньших из них на поворотных частях заднего крыла, обеспечивающих маршевую тягу и выполнение вертикального или короткого взлета/посадки (ВВП или КВП) и короткого взлета и вертикальной посадки (КВВП).
Известен скоростной вертолет "S-97 Raider" компании Sikorsky (США), выполненный по двухвинтовой схеме с соосными несущими и задним толкающим винтами (технология X2), имеет силовую установку с двумя газотурбинными двигателями, передающими крутящий момент через главный редуктор и систему соединительных валов трансмиссии на несущие соосные и задний толкающий винты, последний из которых установлен на конце хвостовой балке за вертикальным двухкилевым оперением, смонтированным на консолях горизонтального оперения, трехопорное убирающееся колесное шасси, с носовой вспомогательной и главными боковыми опорами.
Признаки, совпадающие - наличие двухкилевого оперения, двух турбовальных двигателей, главного редуктора и валов трансмиссии, передающих мощность четырехлопастным соосным несущим и шестилопастному толкающему винтам, обеспечивающими как перемещение вверх-вниз, вперед-назад, влево-вправо, так и его поступательный горизонтальный полет. Вращение несущих соосных винтов - синхронизирующее и противоположно направленное. Взлетная тяговооруженность силовой установки, позволяющая при непродолжительном времени висения достигать полезной нагрузки 2200 кг при взлетном его весе 11…12 т. Скоростной вертолет "S-97 Raider", имея крейсерские скорости полета до 463 км/ч, дальность полета до 1300 км и практический потолок 7600 м, может применяться для транспортировки 6…10 человек.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет с движителем двухвинтовой соосной схемы и с задним толкающим винтом, используемым только на крейсерских режимах полета, имеет большой объем регламентных работ, малую весовую отдачу и радиус действия; вторая - это то, что при висении соосное расположение несущих винтов изменяемого шага и с управлением циклического шага нижнего из них значительно осложняет их конструкцию, а постоянные вибрации, возникающие при работе автомата его перекоса, создающего неблагоприятные условия для работы других механизмов и оборудования; третья - это то, что соосное расположение винтов создает вредную обдувку нижнего несущего винта верхним, усложняет схему редуцирования, а также значительно увеличивает массу редуктора и его высоту, что ограничивает возможности базирования; четвертая - это то, что в вертолете двухвинтовой соосной схемы с полужестким креплением лопастей имеют место неблагоприятное взаимное влияние (индуктивные потери) соосных несущих винтов, которое в отдельных случаях может приводить и к их перехлесту. Все это, в конечном итоге, обеспечивает более высокий удельный расход топлива и, как следствие, более высокую стоимость полета в расчете на пассажирокилометр, но и ограничивает возможность дальнейшего повышения скорости полета и дальности действия, а также показателей транспортной и, особенно, топливной эффективности.
Известен скоростной гибридный вертолет "Eurocopter X3" (ЕС), выполненный по одновинтовой несущей схеме с пятилопастным несущим винтом и двумя тянущими винтами на концах высокорасположенного крыла (технология X3), имеет силовую установку с двумя турбовальными двигателями, передающими крутящий момент через главный редуктор и соединительные валы трансмиссии на несущий и передние тянущие винты, создающие при висении и управление по курсу, вертикальное двухкилевое оперение, смонтированное на концах стабилизатора, трехопорное убирающееся колесное шасси, с носовой вспомогательной и главными боковыми опорами.
Признаки, совпадающие - наличие высокорасположенного крыла, двухкилевого оперения и двух турбовальных двигателей Turbomeca RTM322 мощностью по 2720 л.с., более сложного редуктора и трансмиссии валов с общей длиною 10,82 м, передающих мощность несущему и передним тянущим винтам. Несущий винт, имеющий автомат перекоса с управлением общего и циклического изменения его шага, предназначен для создания подъемной силы, а поступательное движение в скоростном полете обеспечивают тянущие винты, которые также предотвращают вращение вертолета на режиме висения при компенсации реактивного момента, возникающего при вращении несущего винта. Вращение несущего и передних двух винтов - синхронизирующее. Скоростной гибридный вертолет "Eurocopter X3", выполненный на платформе вертолета модели EC 155 с рядом агрегатов от EC 175, оснащен крылом, которое, имея большое отрицательное поперечное V, снижает нагрузку на несущий винт и обеспечивает до 80% общей подъемной силы при горизонтальном полете и позволяет летать на 50% быстрее и выше, чем современные классические вертолеты, достичь скорости до 430 км/ч, дальности полета до 1248 км и иметь практический потолок 7600 м при перевозке 16 человек с топливной эффективностью 80,67 г/пасс·км (с учетом резерва топлива для выполнения получасового полета). Взлетная тяговооруженность силовой установки, позволяющая при использовании 70% ее мощности иметь целевую нагрузку 1600 кг и увеличить взлетный вес вертолета модели EC 155 на 30%.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет одновинтовой несущей схемы с передними винтами на концах консолей крыла, используемыми как при висении в качестве рулевых винтов, так и на крейсерских режимах полета в качестве двухвинтовых движителей, имеет повышенное аэродинамическое сопротивление, сложную схему редуцирования при независимом вращении трех винтов, большую массу хвостовой балки и валов трансмиссии, малую весовую отдачу и радиус действия; вторая - это то, что в вертолете одновинтовой схемы имеют место непроизводительные затраты мощности, требуемой для парирования реактивного момента несущего винта тянущими винтами, составляют 10-17% от мощности, потребной для вращения несущего винта, а также необходимость крыла большего размаха, агрегатов крыльевой трансмиссии и опасность, создаваемая рулевыми винтами, смонтированными на концах крыла, для наземного персонала; третья - это то, что вес передних винтов вместе с крылом и агрегатами трансмиссии составляет до 15% веса пустого вертолета и имеет тенденцию к увеличению с ростом взлетного его веса; четвертая - это то, что крыло и хвостовое оперение не имеют механизации и поверхностей управления, что предопределяет для управления по крену и тангажу необходимость постоянного вращения несущего винта с автоматом перекоса и при авторотации последнего не позволяет использовать его для продольно-поперечного управления; пятая - это то, что ярусное расположение винтов создает вредную обдувку нижних тянущих винтов верхним большим несущим, усложняет схему редуцирования, а также значительно увеличивает массу главного редуктора и его высоту, что ограничивает возможности базирования на кораблях; шестая - это то, что диаметры двух тянущих винтов ограничены размахом консолей крыла и, как следствие, при их увеличении увеличивается и размах крыла. Кроме того, при висении поток от несущего винта, обдувая консоли крыла и создавая значительную общую потерю в вертикальной его тяге, затормаживается и большие скорости потока, отбрасываемого от них, предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги несущего винта и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Все это ограничивает возможность дальнейшего повышения скорости и дальности полета, но и показателей транспортной и топливной эффективности, а также уменьшения при висении непроизводительных затрат мощности, особенно при управлении по курсу.
Наиболее близким к предлагаемому изобретению является четырехвинтовой конвертоплан модели A-19A фирмы "Кертисс-Райт" (США), содержащий высокоплан с расположением тандемом крыльев, оснащенных поворотными винтами, создающими горизонтальную и соответствующим отклонением вертикальную тягу и связанными с главным редуктором соединительными валами H-образной в плане трансмиссии, содержит двигатели, имеющие задний вывод вала для отбора взлетной их мощности и установленные в гондолах перед задним крылом на верхней части фюзеляжа с каждой стороны вертикального киля, и трехопорное убирающееся колесное шасси, с носовой вспомогательной и главными боковыми опорами.
Признаки, совпадающие - наличие четырех поворотных обтекателей с тянущими винтами на концах двух тандемных прямых крыльев малого удлинения, создающими горизонтальную и соответствующим отклонением вверх вертикальную тягу, диапазон поворота винтов от 0° до +100°, избыточная тяговооруженность обеспечивает вертикальный взлет и посадку, а также и продолжение полета на одном работающем двигателе, выполнен по концепции - четыре поворотных винта диаметром 3,6 м. Последние связаны соединительными валами Н-образной трансмиссии в плане с главным и промежуточными Т-образными редукторами, приводимыми двумя двигателями, смонтированными на верхней части фюзеляжа перед задним крылом и с каждой стороны киля в гондолах и создают взлетную мощность, обеспечивающую максимальную скорость до 650 км/ч и дальность его полета до 830 км и перевозку 6-10 человек при нормальном и максимальном взлетном его весе 6195 и 6690 кг.
Причины, препятствующие поставленной задаче: первая - это то, что консольное размещение на концах его крыльев поворотных обтекателей с винтами предопределяет конструктивно сложные прямые переднее и заднее крылья со сложной их механизацией и мощной системой поворота обтекателей с винтами, а также заднее большее крыло имеет размах 7,0 м, что не уменьшает геометрических размеров планера и максимальной удельной нагрузки на крылья (порядка ≈465 кг/м2) и не обеспечивает также возможность сокращения массы конструкции планера и уменьшения геометрических размеров как планера, так и длины трансмиссии валов. Вторая - это то, что на режиме висения поток от винтов, обдувая консоли крыльев и создавая значительную общую потерю в их вертикальной тяге, затормаживается. При этом, скоростной воздушный поток, отбрасываемый от консолей крыльев, предопределяет образование вихревых колец, которые могут на низких скоростях снижения резко уменьшать силу тяги винтов и создавать ситуацию неуправляемого падения, что также не позволит уменьшить общие потери вертикальной тяги четырех винтов и реализовать при висении более полное использование вертикальной тяговооруженности. Третья - это то, что заднее расположение его силовой установки предопределяет как сложность его синхронизирующей H-образной в плане трансмиссии валов (диною ≈20 м), так и конструктивно сложный его главный редуктор, совмещенный с задним T-образным промежуточным редуктором. Последнее, увеличивая удельный вес силовой установки, значительно сокращает удельный вес топлива и, как следствие, снижает дальность его полета, а также весьма увеличивает его массу и снижает весовую отдачу. Четвертая - это то, что горизонтальная тяга винтов обеспечивается только в крейсерском полете, поэтому (при отказе узлов поворота его винтов после выполнения крейсерского полета) взлетать и садиться "по-самолетному", как обычный самолет, этот конвертоплан, снижая безопасность, также не может, но это не исключает возможности короткого его взлета и посадки при повороте вверх винтов на угол 65°.
Предлагаемым изобретением решается задача в указанном выше известном четырехвинтовом конвертоплане модели X-19A упрощения конструкции и уменьшения узлов поворота винтов, увеличения полезной нагрузки, повышения взлетного веса и увеличения весовой отдачи, уменьшения потребной мощности на путевую балансировку при висении и улучшения поперечной и продольной управляемости, повышения высоты и дальности полета, а также показателей транспортной эффективности.
Отличительными признаками предлагаемого изобретения от указанного выше известного четырехвинтового конвертоплана модели X-19A, наиболее близкого к нему, являются наличие того, что он выполнен по двухбалочной схеме с распределенной тягой разновеликих винтов (РТРВ) и оснащен многовинтовой системой по схеме РТРВ-X3+2, имеющей как три больших из них несущих, установленных на концах переднего крыла и конце тонкой хвостовой балке соответственно два передних на консольных пилонах, каждый из которых, имея каплевидную форму в его поперечнике, оснащен в плоскости переднего крыла на его конце отклоненным вниз стреловидным крылышком и один задний винт на кормовом пилоне, так и на консолях заднего крыла, смонтированных по бокам тонкой хвостовой балке и снабженных двумя меньшими из них флюгерно-реверсивными винтами, каждый из которых с редуктором размещен в гондоле, имеющей в плоскости концевой части заднего крыла на ее конце стреловидное крылышко, отклоненное вверх, и смонтированной на конце соответствующей поворотной концевой части, каждая из которых, имея раздельные узлы их поворота, смонтированные по внешним бортам тонких балок разнесенного двухкилевого оперения и создающие возможность в вертикальной плоскости синхронного их отклонения с меньшими винтами на угол от -15° до +105°, располагает размахом, превышающим радиус меньших винтов и обеспечивающим на режимах вертикального взлета/посадки и висения как уменьшение потерь тяги последних, так и вращения без взаимного влияния и их перехлеста с задним большим несущим винтом соответственно при создании ими вертикальной и горизонтальной или наклонной тяги на соответствующих режимах полета или при выполнении технологии КВП при синфазном их отклонении вверх на угол +45°, или их синфазное и дифференциальное отклонение от горизонтального положения вверх/вниз на угол +15°/-15° и на угол ±15° на скоростных режимах горизонтального полета соответственно для продольного и поперечного управления, а также при выполнении технологии ВВП их дифференциальное и синфазное отклонение от вертикального положения вперед/назад на угол ±15° и на угол +15°/-15° на режимах висения соответственно для путевого управления и в направлении полета соответствующего поступательного перемещения вперед/назад, обеспечивающего возможность и висения в воздухе, не перемещаясь соответственно при встречном/попутном ветре с одновременным автоматическим обеспечением стабилизации как по угловой скорости тангажа и крена, так и демпфирования изменений высоты полета, но и, располагая вращением всех несущих винтов без взаимного их перекрытия как в передней и задней, так и в левой и правой группе винтов, выполненных без автоматов перекоса их лопастей и имеющих при этом от всех несущих винтов полную компенсацию реактивных крутящих моментов при противоположном направлении вращения, например, при виде с верху по часовой стрелке и против соответственно как между левым и правым большими винтами переднего крыла, так и между большим задним и меньшими винтами заднего крыла, имеющими одинаковое направление вращения между последними, например, при виде с верху против часовой стрелки, что обеспечивает устранение гироскопического эффекта и создание более плавного обтекания воздушным потоком от соответствующих винтов соответственно переднего и заднего трапециевидных крыльев, имеющих по всему размаху их консолей закрылки, уменьшающие при их максимальном отклонении общие потери на 11% в вертикальной тяге трех больших несущих винтов, снабжен возможностью преобразования его полетной конфигурации с вертолета пятивинтовой несущей схемы в полетную конфигурацию крылатого автожира или винтокрыла с двухвинтовой движительной системой, создающей меньшими винтами заднего крыла маршевую тягу для скоростного крейсерского полета с обеспечением как третьей большей, так и второй средней или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 7 или 17% больше от нормального взлетного веса при вращающихся двух передних с одним задним большими несущими винтами на режиме их авторотации или на режиме, близком к их самовращению, соответственно от набегающего воздушного потока или от одного из работающих двигателей, выдающего 35 или 70% от взлетной его мощности, которые передаются соответственно полностью на меньшие винты заднего крыла или пополам на два последних и на три несущих больших винта, но и обратно.
Кроме того, с целью упрощении конструкции трансмиссии и достижения в 
Кроме того, силовая установка (СУ), выполненная по параллельно-последовательной гибридной технологии с многорежимными способами обеспечения генерирующей мощности для электропитания от внутреннего и внешнего источников вращения обратимых электромоторов-генераторов (ОЭМГ) соответственно ТДД и больших несущих винтов, самовращающихся от набегающего воздушного потока, снабжена как двумя левой и правой передними мотогондолами с консольными ОЭМГ, имеющими между собой одинаковые и суммарную пиковую их мощности, составляющую 50% от взлетной мощности СУ, и вращательно связанными с редукторами соответствующих передних больших винтов, так и двумя левой и правой задними мотогондолами с электромоторами, имеющими меньший суммарный по пиковой мощности их типоразмер, равный 25% от взлетной мощности СУ, и вращательно связанными с редукторами задних меньших винтов, но и оснащена кормовой гибридной мотогондолой, выполненной с меньшей по взлетной мощности типоразмером, равным 25% от взлетной мощности СУ, и снабженной наряду с ТДД, вращающим вал кормового ОЭМГ, выходной вал которого вращательно связан с редуктором заднего большего винта, имеет входную, но и выходную муфты сцепления, установленные на соответствующих валах соответственно между ТТД и ОЭМГ, но и между последним и редуктором винта и снабжена системой электропривода, обеспечивающей подключение/отключение соответствующих электромоторов в задних мотогондолах и переключение генерирующей мощности и порядок подзарядки аккумуляторов от консольных/кормового ОЭМГ, которые в режиме электрогенератора обеспечивают поочередно три способа генерации их мощности: или когда все три получают вращение от внешнего источника с отключенным кормовым ОЭМГ от ТДД, или когда вращаются от внешнего источника два консольных и один кормовой от внутреннего источника энергии, но и когда один кормовой вращается от внутреннего источника энергии с отключенными консольными/кормовым ОЭМГ от авторотирующих передних/заднего больших винтов при полетной конфигурации крылатого автожира или на стоянке соответственно от набегающего воздушного потока или ветра, но и при отсутствии ветра и отказе консольных ОЭМГ, при этом каждая входная и выходная электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением/расцеплением вала ОЭМГ с выходным и входным валом соответственно ТДД и редуктора заднего большего винта, позволяют реализовать в гибридной мотогондоле два способа работы ТДД и три ОЭМГ, работающего в режиме и/или электромотора, но и электрогенератора, соответственно при совместной передаче их взлетной и пиковой мощности на задний больший винт при выполнении ВВП или самостоятельной передачи как пиковой, так и номинальной мощности ОЭМГ на вал заднего большего винта в случае отказа как ТДД, так и последнего с двумя электромоторами больших передних винтов и продолжение полета соответственно и как электровертолета при аварийной вертикально-посадочной, так и крейсерской полетной конфигурации как крылатого электроавтожира, но и самостоятельной работы ТДД при распределенной передаче его номинальной мощности и на вал ОЭМГ, работающего в режиме электрогенератора, и на вал заднего большего винта, обеспечивающего после выполнения КВП горизонтальный скоростной полет в перегрузочном варианте.
Благодаря наличию этих признаков, позволяющих выполнить многовинтовой конвертируемый скоростной вертолет (МКСВ) двухбалочной схемы и концепции разнесенного расположения на консолях тандемных крыльев и на конце фюзеляжа пятивинтовой системы с распределенной тягой разновеликих винтов, выполненной в виде многовинтовой системы по схеме РТРВ-X3+2, имеющей смонтированные на вертикальных пилонах как три больших из них на концах переднего крыла и тонкой хвостовой балке соответственно два передних винта и один задний, так и с изменяемым вектором тяги, два меньших из них на поворотных частях заднего крыла, имеющих диаметры, определяемые из соотношения:  м (где: D и d - диаметры больших и меньших винтов соответственно). Снабжен возможностью преобразования его полетной конфигурации с вертолета пятивинтовой несущей схемы в полетную конфигурацию крылатого автожира или винтокрыла с двухвинтовой движительной системой, создающей меньшими винтами заднего крыла маршевую тягу для скоростного крейсерского полета с обеспечением как третьей большей, так и второй средней или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 7 или 17% больше от нормального взлетного веса при вращающихся двух передних с одним задним большими несущими винтами на режиме их авторотации или на режиме, близком к их самовращению, соответственно от набегающего воздушного потока или от одного из работающих двигателей, но и обратно. Каждая из поворотных концевых части заднего крыла, имея раздельные узлы их поворота, смонтированные по внешним бортам тонких балок разнесенного двухкилевого оперения и создающие возможность синхронного их отклонения с меньшими винтами в вертикальной плоскости на угол от -15° до +105°, и располагая размахом, превышающим радиус меньших винтов, предопределяет возможность последних обеспечивать как уменьшение потерь их тяги на режимах вертикального взлета/посадки и висения, так и вращения без взаимного влияния и их перехлеста с задним большим несущим винтом соответственно при создании ими вертикальной и горизонтальной или наклонной тяги на соответствующих режимах полета или при выполнении технологии КВП при синфазном их отклонении вверх на угол +45°, или их синфазное и дифференциальное отклонение от горизонтального положения вверх/вниз на угол +15°/-15° и на угол ±15° на скоростных режимах горизонтального полета соответственно для продольного и поперечного управления. Система трансмиссии турбовинтовой СУ, имея наряду с многопоточным двухуровневым главным редуктором, обеспечивающим передачу взлетной мощности от двигателей, например, ГТД или ТДД к передней и задней группе несущих винтов посредством соответственно Y-образного главного и T-образного промежуточного редукторов в плане с соответствующими соединительными валами, связывающими пару больших винтов переднего крыла через два консольных угловых редуктора и один больший винт заднего крыла через центральный угловой редуктор. В гибридной СУ во время крейсерского полета увеличение генерирующей мощности для электропитания, когда падение заряда литиево-ионных полимерных аккумуляторов снизится до 25% от его максимума, система управления автоматически в кормовой гибридной мотогондоле отключит выходной муфтой сцепления редуктор заднего большего винта от ОЭМГ, включит ТДД, который будет вращать ОЭМГ, обеспечивающий подзарядку аккумуляторов в полетной конфигурации крылатого автожира. При этом увеличение генерирующей мощности для электропитания может обеспечиваться также и от каждого их трех ОЭМГ которые, работая при крейсерском полете в режиме электроветрогенераторов, получают вращение от больших несущих двух передних и одного заднего несущего винта, что предопределяет авторотацию при их обдувке от набегающего потока, а величина возникающей при этом отрицательной тяги не будет значительной, так как лопасти больших винтов установлены регулятором не на минимальный угол, потому что при дальнейшем полете без изменения скорости большие винты будут авторотировать на оптимальном числе оборотов и под контролем регулятора оборотов. При авторотации срыв потока на лопастях больших несущих винтов отодвигается на более высокие скорости полета, что позволит достичь скорости полета 465…500 км/ч. Все это позволит повысить скороподъемность, высоту и дальность полета, но и достичь весьма малошумной гибридной СУ, имеющей ряд способов подзарядки аккумуляторов, что обеспечит при равномерном распределении заряда аккумуляторов возможность работы электромоторов и ТДД без пиковых перегрузок и при минимальной акустической сигнатуре. Кроме того, это позволит упростить систему управления электроприводами, но и повысить безопасность полетов и использовать ТДД меньших габаритов в его поперечнике, что уменьшит мидель кормовой гибридной мотогондолы и ширину обтекателя гибридной мотогондолы и, следовательно, предопределит меньшее затенение соответствующего большего заднего несущего винта при вертикальном взлете, посадке и висении. Это позволит также увеличить полезную нагрузку, взлетный вес и весовую отдачу, но и повысить транспортную и топливную эффективность при скоростном горизонтальном полете, особенно МКСВ.
м (где: D и d - диаметры больших и меньших винтов соответственно). Снабжен возможностью преобразования его полетной конфигурации с вертолета пятивинтовой несущей схемы в полетную конфигурацию крылатого автожира или винтокрыла с двухвинтовой движительной системой, создающей меньшими винтами заднего крыла маршевую тягу для скоростного крейсерского полета с обеспечением как третьей большей, так и второй средней или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 7 или 17% больше от нормального взлетного веса при вращающихся двух передних с одним задним большими несущими винтами на режиме их авторотации или на режиме, близком к их самовращению, соответственно от набегающего воздушного потока или от одного из работающих двигателей, но и обратно. Каждая из поворотных концевых части заднего крыла, имея раздельные узлы их поворота, смонтированные по внешним бортам тонких балок разнесенного двухкилевого оперения и создающие возможность синхронного их отклонения с меньшими винтами в вертикальной плоскости на угол от -15° до +105°, и располагая размахом, превышающим радиус меньших винтов, предопределяет возможность последних обеспечивать как уменьшение потерь их тяги на режимах вертикального взлета/посадки и висения, так и вращения без взаимного влияния и их перехлеста с задним большим несущим винтом соответственно при создании ими вертикальной и горизонтальной или наклонной тяги на соответствующих режимах полета или при выполнении технологии КВП при синфазном их отклонении вверх на угол +45°, или их синфазное и дифференциальное отклонение от горизонтального положения вверх/вниз на угол +15°/-15° и на угол ±15° на скоростных режимах горизонтального полета соответственно для продольного и поперечного управления. Система трансмиссии турбовинтовой СУ, имея наряду с многопоточным двухуровневым главным редуктором, обеспечивающим передачу взлетной мощности от двигателей, например, ГТД или ТДД к передней и задней группе несущих винтов посредством соответственно Y-образного главного и T-образного промежуточного редукторов в плане с соответствующими соединительными валами, связывающими пару больших винтов переднего крыла через два консольных угловых редуктора и один больший винт заднего крыла через центральный угловой редуктор. В гибридной СУ во время крейсерского полета увеличение генерирующей мощности для электропитания, когда падение заряда литиево-ионных полимерных аккумуляторов снизится до 25% от его максимума, система управления автоматически в кормовой гибридной мотогондоле отключит выходной муфтой сцепления редуктор заднего большего винта от ОЭМГ, включит ТДД, который будет вращать ОЭМГ, обеспечивающий подзарядку аккумуляторов в полетной конфигурации крылатого автожира. При этом увеличение генерирующей мощности для электропитания может обеспечиваться также и от каждого их трех ОЭМГ которые, работая при крейсерском полете в режиме электроветрогенераторов, получают вращение от больших несущих двух передних и одного заднего несущего винта, что предопределяет авторотацию при их обдувке от набегающего потока, а величина возникающей при этом отрицательной тяги не будет значительной, так как лопасти больших винтов установлены регулятором не на минимальный угол, потому что при дальнейшем полете без изменения скорости большие винты будут авторотировать на оптимальном числе оборотов и под контролем регулятора оборотов. При авторотации срыв потока на лопастях больших несущих винтов отодвигается на более высокие скорости полета, что позволит достичь скорости полета 465…500 км/ч. Все это позволит повысить скороподъемность, высоту и дальность полета, но и достичь весьма малошумной гибридной СУ, имеющей ряд способов подзарядки аккумуляторов, что обеспечит при равномерном распределении заряда аккумуляторов возможность работы электромоторов и ТДД без пиковых перегрузок и при минимальной акустической сигнатуре. Кроме того, это позволит упростить систему управления электроприводами, но и повысить безопасность полетов и использовать ТДД меньших габаритов в его поперечнике, что уменьшит мидель кормовой гибридной мотогондолы и ширину обтекателя гибридной мотогондолы и, следовательно, предопределит меньшее затенение соответствующего большего заднего несущего винта при вертикальном взлете, посадке и висении. Это позволит также увеличить полезную нагрузку, взлетный вес и весовую отдачу, но и повысить транспортную и топливную эффективность при скоростном горизонтальном полете, особенно МКСВ.
Предлагаемое изобретение в условиях различной полетной конфигурации МКСВ исполнения РТРВ-X3+2 с тандемным расположением двух крыльев, переднее из которых имеет обратную стреловидность, иллюстрируется общими видами на фиг. 1.
На фиг. 1 изображен турбовинтовой МКСВ на общих видах сверху и сбоку соответственно а) и б) с расположением трех больших винтов на концах переднего крыла и тонкой хвостовой балке соответственно два передних винта и один задний на вертикальных пилонах и с изменяемым вектором тяги два меньших винта на поворотных частях заднего крыла для различных вариантов возможного его использования:
а) в полетной конфигурации вертолета пятивинтовой несущей схемы РТРВ-X3+2 с разновеликими двумя передними и задним большими из них, но и двумя меньшими несущими винтами, размещенными соответственно на концах переднего крыла и тонкой хвостовой балке, но и на поворотных концевых частях заднего крыла;
б) в полетной конфигурации крылатого автожира или винтокрыла с трехвинтовой несущей схемой для создания подъемной силы совместно с тандемными крыльями и маршевой тягой, обеспечиваемой двумя задними меньшими винтами.
Турбовинтовой МКСВ, представленный на фиг. 1 и выполненный в виде высокоплана по двухбалочной схеме, содержит фюзеляж 1 и небольшого удлинения расположенные тандемом крылья с околофюзеляжными стреловидными наплывами 2, объединяющими фюзеляж 1 и крылья в единую плавно образованную конструкцию (см. фиг. 1a) переднее крыло 3 из которых обратной стреловидности смонтировано ниже трапециевидного заднего крыла 4. Разнесенные тонкие балки 5 соединяют заднее крыло 4 с двухкилевым оперением 6, имеющим рули направления 7. Каждая тонкая балка 5 сверху и под ее концом оснащена соответственно форкилем 8, имеющим до носка заднего крыла 4 аэродинамический гребень, и нижним, повышая путевую и устойчивость по крену, отклоненным наружу килем 9 (см. фиг. 1б). Три больших несущих винта смонтированы на концах переднего крыла 3 и тонкой хвостовой балке 10 соответственно два передних винта левый 11 и правый 12 и один задний 13 с их редукторами на вертикальных консольных 14 и кормовом 15 пилонах. С изменяемым вектором тяги два меньших винта левый 16 и правый 17 смонтированы с их редукторами в гондолах 18 на поворотных частях 19 заднего крыла 4. Каждый из консольных каплевидной формы пилонов 14 оснащен в плоскости переднего крыла 3 на его конце отклоненным вниз стреловидным крылышком 20, а каждая гондола 18 оснащена на ее конце в плоскости поворотной части 19 заднего крыла 4 отклоненным вверх стреловидным крылышком 21. Консоли тандемных крыльев переднего 3 и заднего 4 оснащены по всему их размаху закрылками 22. Во время аварийной посадки на режиме авторотации передней 11, 12 и задней 13, 16, 17 группы несущих винтов для разгрузки крыльев 3 и 4 их закрылки 22 автоматически отклоняются на угол 40°, а при выполнении вертикального взлета/посадки и висения для уменьшения потерь в вертикальной их тяге - на угол 75°. Вращение всех трехлопастных винтов, выполненных флюгерно-реверсивными и без автоматов перекоса их лопастей, осуществляется без взаимного их перекрытия передней 11, 12 и задней 13, 16, 17 винтов. На вертолетных режимах полета парирование реактивного момента, образуемого от передних 11, 12 и задних 13, 16, 17 несущих винтов различного диаметра, обеспечивается при противоположном направлении вращения, например, при виде с верху по часовой стрелке и против соответственно как между левым 11 и правым 12 большими винтами переднего крыла 3, так и между большим задним 13 и меньшими винтами 16-17 заднего крыла 4, имеющими одинаковое направление вращения между последними, например, при виде сверху против часовой стрелки (см. фиг. 1а). Имеется согласование совместной работы системы путевого управления при висении, продольного и поперечного на крейсерских режимах полета и выполнении технологии КВП с учетом соответствующего отклонения поворотных частях 19 заднего крыла 4, включая и ускоренного.
Турбовинтовая СУ, состоящая из двух мотогондол 23, в каждой из которых имеется, например, турбовальный ГТД, выполненный для отбора их взлетной их мощности с передним выводом вала. Каждый из последних, образуя с соответствующим соединительным валом и главным редуктором синхронизирующую систему, снабжен муфтами свободного хода и сцепления (на фиг. 1 не показаны). Избыточная тяговооруженность двух ГТД, обеспечивающая продолжение полета при одном работающем двигателе и любом промежуточном положении поворотных частей 19 крыла 4 с задними меньшими винтами 16 и 17 на внешних гондолах 18 и вращении больших двух передних 11, 12 и одного заднего 13 несущих винтов во время переходного режима, что создает возможность осуществления полета и аварийной посадки, что, тем самым, повышается безопасность выполнения полетов. Передача взлетной мощности от ГТД к передней 11, 12 и задней 13, 16, 17 несущих винтов обеспечивается посредством соответственно Y-образного главного и T-образного промежуточного редукторов в плане с соответствующими соединительными валами, связывающими как через угловые два консольных и кормовой редукторы, обеспечивающие перегибы соответствующих валов в вертикальной плоскости, соответственно с большими несущими винтами передними 11-12 и задним 13 посредством муфт сцепления, так и поперечными соединительными валами, передающими крутящий момент посредством муфт сцепления на поворотные меньшие винты 16-17 заднего крыла 4 (на фиг. 1 не показаны). Трехопорное убирающееся колесное шасси, главные боковые опоры с колесами 24 убираются в передние бортовые отсеки 25 фюзеляжа 1, вспомогательная задняя опора с управляемым мотор-колесом 26 - в кормовую его нишу.
Управление турбовинтовым МКСВ обеспечивается общим и дифференциальным изменением шага несущих винтов трех больших передних левого 11 и правого 12 с задним 13, меньших двух левого 16 и правого 17 и отклонением рулевых поверхностей: рулей направления 7 и поворотных частей 19, работающих в зоне активного обдува этих винтов. При крейсерском полете подъемная сила создается крыльями 3-4, горизонтальная тяга - меньшими винтами 16-17, на режиме висения только винтами 11-12, 13 и 16-17, на режиме перехода - крыльями 3-4 с винтами 11-12, 13 и 16-17. При переходе к вертикальному взлету-посадке (висению) закрылки 22 крыльев 3-4 отклоняются на максимальные их углы синхронно с поворотов меньших винтов 16-17 от горизонтального положения, отклоняясь вверх, устанавливаются вертикально (см. фиг. 1а). После установки поворотных меньших винтов 16-17 в вертикальное положение вдоль линии вертикальной его тяги и создание подъемной тяги с передними 11-12 и задним 13 несущими винтами обеспечиваются вертолетные режимы полета. С приближением к поверхности земли (палубы корабля) и полете вблизи них несущие винты большие 11-12 и задним 13 и задние меньшие 16-17, имея взаимно противоположное их вращение между винтами левым и правым передней группы и между задними большим 13 и меньшими 16-17 несущими винтами при одинаковом направлении вращения двух последних (см. фиг. 1a), обеспечивающих путевое управление с компенсацией реактивного момента от дифференциального их отклонения при повышении эффективности всех несущих винтов. Поворотные части 19 крыла 4 с меньшими винтами 16-17 отклоняется от горизонтального положения вверх в вертикальное на угол +90° и на угол +45° соответственно при выполнении технологии ВВП и КВП на вертолетных и винтокрылых режимах полета МКСВ при взлетно-посадочных режимах в перегрузочном варианте с максимальным взлетным весом. При этом маневрирование МКСВ на аэродроме и разгон легкого их класса до 50 км/ч на режимах укороченного взлета обеспечивается от заднего управляемого мотор-колеса 26. Для соответствующей посадки турбовинтового МКСВ на поверхность земли (палубы корабля) используются колеса 24 и 26 убирающегося трехопорного колесного шасси.
При висении на вертолетных режимах полета продольное управление МКСВ осуществляется изменением шага винтов передней 11-12 группы и задней группы 13, 16-17, путевое управление - соответствующим дифференциальным отклонением поворотных частей 19 крыла 4 с меньшими винтами 16-17. Поперечное управление обеспечивается изменением шага левой группы несущих винтов 11, 16 и правой группы несущих винтов 12, 18, осуществляющих поперечную балансировку при одновременном изменении шага винтов этих групп. Отсутствие при висении перекрытия передних 11-12 и задних 13, 16-17 несущих винтов также снижает вредное взаимовлияние и повышает их заполнение, что, в свою очередь, значительно уменьшает проблему срыва потока. После вертикального взлета и набора высоты для перехода на крейсерский режим полета поворотные части 19 крыла 4 с меньшими винтами 16-17 синхронно устанавливаются в горизонтальное положение (см. фиг. 1б). После чего убираются закрылки 22 и производится крейсерский скоростной полет, при котором путевое управление обеспечивается рулями направления 7. Продольное и поперечное управление осуществляется синфазным и дифференциальным отклонением поворотных частей 19 крыла 4 соответственно. На крейсерских режимах скоростного полета МКСВ при создании горизонтальной тяги его меньшие винты 16-17, несущие передние 11-12 и задний 13 имеют взаимно противоположное их вращения в каждой передней и задней группе винтов и, тем самым, соответственно увеличивают КПД винтов, устраняют гироскопический эффект и обеспечивают более плавное обтекание крыльев 3-4 и весьма повышают эффективность движительной системы и несущей группы винтов. При его полетной конфигурации вертолета пятивинтовой несущей схемы реактивные моменты с учетом дифференциального отклонения задних 16-17 винтов, используемых как несущие винты, компенсируются полностью за счет также взаимно противоположного их вращения с винтами в соответствующих группах.
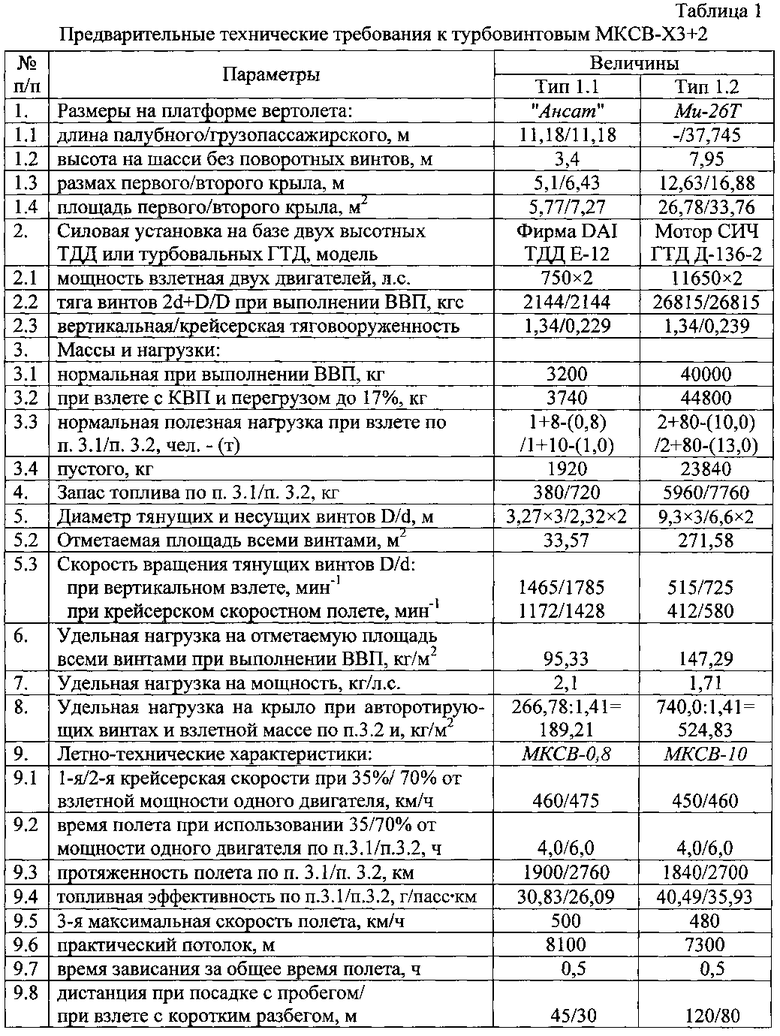
Таким образом, турбовинтовой МКСВ исполнения РТРВ-X3+2, имеющий двухкилевое оперение и тандемное расположение крыльев с передними и задними несущими винтами, выполненными без автоматов перекоса их лопастей, представляет собой гибридный скоростной вертолет с СУ, выполненной по параллельно-последовательной гибридной технологии с многорежимными способами обеспечения генерирующей мощности для электропитания от внутреннего и внешнего источников вращения ОЭМГ соответственно ТДД и больших несущих винтов, самовращающихся от набегающего воздушного потока. Задние меньшие флюгерно-реверсивные винты, создающие вертикальную и соответствующим отклонением горизонтальную тягу, обеспечивают необходимые управляющие моменты и уменьшение дистанции при посадке с пробегом. Переднее меньшее крыло обратной стреловидности находится ниже заднего и оба, создавая дополнительную подъемную силу, разгружают несущие винты, что и предопределяет наравне с высокой тяговооруженностью СУ возможность легко реализовать выполнение технологии ВВП и КВП, но и КВВП. Поэтому только на базе имеющихся конструкций вертолетов можно, сокращая сроки освоения турбовинтовых МКСВ и турбоэлектрических беспилотных гибридных скоростных вертолетов (БГСВ), проводить дальнейшие исследования по созданию широкого их семейства, включая и МКСВ-10 тяжелого класса (см. табл. 1). Однако нет никаких сомнений в том, что на пути освоения таких МКСВ и БГСВ, используя вышеназванные преимущества, предстоит преодолеть еще немало трудностей и проблем. Это, в первую очередь, относится к созданию для турбоэлектрических БГСВ более экономичных и совершенных электродвигателей, ОЭМГ, ТДД и ГТД. Так как современные технологии, обеспечивая следующие величины удельной массы электрических устройств как для электродвигателя с блоком управления до 0,32 кг/кВт (при мощности более 250 кВт), так и для электрогенератора до 0,23 кг/кВт, аккумуляторов с плотностью энергии 0,2 кВт/кг, увеличивают массу узлов и компонентов БГСВ, которые, имея 27…40% от взлетной его массы, весьма ограничивают время непрерывного полета электровертолета до 20-30 минут. Поэтому увеличение времени полета и генерирующей мощности для электропитания должно обеспечиваться за счет широкого использования внешнего источника, особенно, в многорежимной гибридной СУ с тремя ОЭМГ, которые, работая при крейсерском полете от набегающего потока воздуха в режиме электроветрогенераторов и вращаясь от больших трех несущих винтов, позволит достичь времени полета не менее 3 и 5 часов соответственно при ВВП и КВП.
Поэтому не исключено на платформе вертолета "Ансат" с ЭДСУ освоение турбоэлектрического БГСВ с взлетным весом 3200 и 3740 кг и для перевозки 0,9 и 1,1 т груза на дальность до 1900 и 2760 км соответственно при выполнении ВВП и КВП. Многорежимная гибридная его СУ, имеющая три ОЭМГ для электропитания и два электромотора суммарной пиковой/номинальной мощности соответственно 770/424 кВт и 276/152 кВт, снабжена генераторным ТДД, который может предоставить еще 109 кВт (80 л.с.). Его литиевая батарея позволит БГСВ-0,9 улететь на расстояние в 488 км при 2-й крейсерской скорости 475 км/ч. Однако при падении ее заряда до 25% от максимального значения включится ТДД и будет, вращая задний ОЭМГ, в полете подпитывать аккумуляторы наравне с передними ОЭМГ, вращающимися от набегающего потока. Топливный его бак при выполнении ВВП вмещает 250 кг топлива, что эквивалентно дополнительным 1482 км и позволит при выполнении ВВП достичь дальности полета до 1900 км и достойно конкурировать с англо-итальянской фирмой "AgustaWestland", осваивающей электрический конвертоплан "Project Zero".
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2598105C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С АРОЧНЫМ КРЫЛОМ | 2017 |
|
RU2648503C1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2016 |
|
RU2643063C2 |
| ГИБРИДНЫЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2577931C1 |
| БЕСПИЛОТНЫЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2601470C1 |
Изобретение относится к области авиации, в частности к конструкциям комбинированных вертолетов. Многовинтовой конвертируемый скоростной вертолет (МКСВ) содержит двигатели с задним выводом вала для отбора взлетной их мощности, установленные в гондолах перед задним крылом на верхней части фюзеляжа, трехопорное шасси. МКСВ выполнен по двухбалочной схеме и концепции разнесенного расположения на консолях тандемных крыльев и на конце фюзеляжа пятивинтовой системы с распределенной тягой разновеликих винтов (РТРВ), выполненной по схеме РТРВ-X3+2, имеющей три больших винта на концах переднего крыла и тонкой хвостовой балке, соответственно два передних винта и один задний, так и с изменяемым вектором тяги два меньших винта на поворотных частях заднего крыла. МКСВ снабжен возможностью преобразования полетной конфигурации с вертолета пятивинтовой несущей схемы в полетную конфигурацию крылатого автожира или винтокрыла с двухвинтовой движительной системой, создающей меньшими винтами заднего крыла маршевую тягу для скоростного крейсерского полета, вертикального, так и короткого взлета в перегрузочном его варианте при вращающихся несущих винтах в режиме авторотации от набегающего потока или на режиме, близком к самовращению от двигателя. Обеспечивается увеличение весовой отдачи, улучшение поперечной и продольной управляемости. 2 з.п. ф-лы, 1 ил.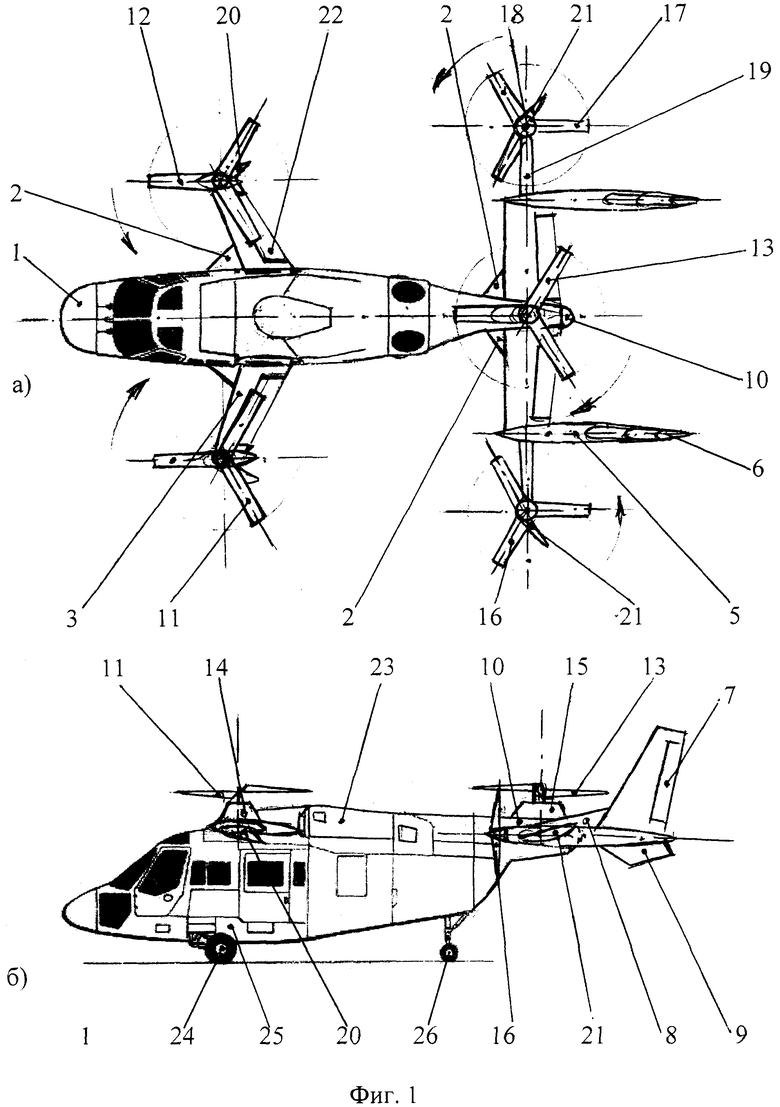
1. Многовинтовой конвертируемый скоростной вертолет, содержащий высокоплан с расположением тандемом крыльев, оснащенных поворотными винтами, создающими горизонтальную и соответствующим отклонением вертикальную тягу и связанными с главным редуктором соединительными валами Н-образной в плане трансмиссии, содержит двигатели, имеющие задний вывод вала для отбора взлетной их мощности и установленные в гондолах перед задним крылом на верхней части фюзеляжа с каждой стороны вертикального киля, и трехопорное убирающееся колесное шасси, с носовой вспомогательной и главными боковыми опорами, отличающийся тем, что он выполнен по двухбалочной схеме с распределенной тягой разновеликих винтов (РТРВ) и оснащен многовинтовой системой по схеме РТРВ-Х3+2, имеющей как три больших из них несущих, установленных на концах переднего крыла и конце тонкой хвостовой балки соответственно два передних на консольных пилонах, каждый из которых, имея каплевидную форму в его поперечнике, оснащен в плоскости переднего крыла на его конце отклоненным вниз стреловидным крылышком и один задний винт на кормовом пилоне, так и на консолях заднего крыла, смонтированных по бокам тонкой хвостовой балки и снабженных двумя меньшими из них флюгерно-реверсивными винтами, каждый из которых с редуктором размещен в гондоле, имеющей в плоскости концевой части заднего крыла на ее конце стреловидное крылышко, отклоненное вверх, и смонтированной на конце соответствующей поворотной концевой части, каждая из которых, имея раздельные узлы их поворота, смонтированные по внешним бортам тонких балок разнесенного двухкилевого оперения и создающие возможность в вертикальной плоскости синхронного их отклонения с меньшими винтами на угол от -15º до +105º, располагает размахом, превышающим радиус меньших винтов и обеспечивающим на режимах вертикального взлета/посадки и висения как уменьшение потерь тяги последних, так и вращения без взаимного влияния и их перехлеста с задним большим несущим винтом соответственно при создании ими вертикальной и горизонтальной или наклонной тяги на соответствующих режимах полета или при выполнении технологии КВП при синфазном их отклонении вверх на угол +45º, или их синфазное и дифференциальное отклонение от горизонтального положения вверх/вниз на угол +15º/-15° и на угол ±15º на скоростных режимах горизонтального полета соответственно для продольного и поперечного управления, а также при выполнении технологии ВВП их дифференциальное и синфазное отклонение от вертикального положения вперед/назад на угол ±15º и на угол +15º/-15º на режимах висения соответственно для путевого управления и в направлении полета соответствующего поступательного перемещения вперед/назад, обеспечивающего возможность и висения в воздухе, не перемещаясь соответственно при встречном/попутном ветре с одновременным автоматическим обеспечением стабилизации как по угловой скорости тангажа и крена, так и демпфирования изменений высоты полета, но и, располагая вращением всех несущих винтов без взаимного их перекрытия как в передней и задней, так и в левой и правой группе винтов, выполненных без автоматов перекоса их лопастей и имеющих при этом от всех несущих винтов полную компенсацию реактивных крутящих моментов при противоположном направлении вращения, например, при виде сверху по часовой стрелке и против соответственно как между левым и правым большими винтами переднего крыла, так и между большим задним и меньшими винтами заднего крыла, имеющими одинаковое направление вращения между последними, например, при виде сверху против часовой стрелки, что обеспечивает устранение гироскопического эффекта и создание более плавного обтекания воздушным потоком от соответствующих винтов соответственно переднего и заднего трапециевидных крыльев, имеющих по всему размаху их консолей закрылки, уменьшающие при их максимальном отклонении общие потери на 11% в вертикальной тяге трех больших несущих винтов, снабжен возможностью преобразования его полетной конфигурации с вертолета пятивинтовой несущей схемы в полетную конфигурацию крылатого автожира или винтокрыла с двухвинтовой движительной системой, создающей меньшими винтами заднего крыла маршевую тягу для скоростного крейсерского полета с обеспечением как третьей большей, так и второй средней или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 7 или 17% больше от нормального взлетного веса при вращающихся двух передних с одним задним большими несущими винтами на режиме их авторотации или на режиме близком к их самовращению соответственно от набегающего воздушного потока или от одного из работающих двигателей, выдающего 35 или 70% от взлетной его мощности, которые передаются соответственно полностью на меньшие винты заднего крыла или пополам на два последних и на три несущих больших винта, но и обратно.
2. Многовинтовой конвертируемый скоростной вертолет по п.1, отличающийся тем, что с целью упрощения конструкции трансмиссии и достижения в 
3. Многовинтовой конвертируемый скоростной вертолет по пп.1 и 2, отличающийся тем, что силовая установка (СУ), выполненная по параллельно-последовательной гибридной технологии с многорежимными способами обеспечения генерирующей мощности для электропитания от внутреннего и внешнего источников вращения обратимых электромоторов-генераторов (ОЭМГ) соответственно ТДД и больших несущих винтов, самовращающихся от набегающего воздушного потока, снабжена как двумя левой и правой передними мотогондолами с консольными ОЭМГ, имеющими между собой одинаковые и суммарную пиковую их мощности, составляющую 50% от взлетной мощности СУ, и вращательно связанными с редукторами соответствующих передних больших винтов, так и двумя левой и правой задними мотогондолами с электромоторами, имеющими меньший суммарный по пиковой мощности их типоразмер, равный 25% от взлетной мощности СУ, и вращательно связанными с редукторами задних меньших винтов, но и оснащена кормовой гибридной мотогондолой, выполненной с меньшим по взлетной мощности типоразмером, равным 25% от взлетной мощности СУ, и снабженной наряду с ТДД, вращающим вал кормового ОЭМГ, выходной вал которого вращательно связан с редуктором заднего большего винта, имеет входную, но и выходную муфты сцепления, установленные на соответствующих валах соответственно между ТТД и ОЭМГ, но и между последним и редуктором винта и снабжена системой электропривода, обеспечивающей подключение/отключение соответствующих электромоторов в задних мотогондолах и переключение генерирующей мощности и порядок подзарядки аккумуляторов от консольных/кормового ОЭМГ, которые в режиме электрогенератора обеспечивают поочередно три способа генерации их мощности: или когда все три получают вращение от внешнего источника с отключенным кормовым ОЭМГ от ТДД, или когда вращаются от внешнего источника два консольных и один кормовой от внутреннего источника энергии, но и когда один кормовой вращается от внутреннего источника энергии с отключенными консольными/кормовым ОЭМГ от авторотирующих передних/заднего больших винтов при полетной конфигурации крылатого автожира или на стоянке соответственно от набегающего воздушного потока или ветра, но и при отсутствии ветра и отказе консольных ОЭМГ, при этом каждая входная и выходная электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением/расцеплением вала ОЭМГ с выходным и входным валом соответственно ТДД и редуктора заднего большего винта, позволяют реализовать в гибридной мотогондоле два способа работы ТДД и три ОЭМГ, работающего в режиме и/или электромотора, но и электрогенератора, соответственно при совместной передаче их взлетной и пиковой мощности на задний больший винт при выполнении ВВП или самостоятельной передачи как пиковой, так и номинальной мощности ОЭМГ на вал заднего большего винта в случае отказа как ТДД, так и последнего с двумя электромоторами больших передних винтов и продолжение полета соответственно и как электровертолета при аварийной вертикально-посадочной, так и крейсерской полетной конфигурации как крылатого электроавтожира, но и самостоятельной работы ТДД при распределенной передаче его номинальной мощности и на вал ОЭМГ, работающего в режиме электрогенератора, и на вал заднего большего винта, обеспечивающего после выполнения КВП горизонтальный скоростной полет в перегрузочном варианте.
| CN 104058093 A, 24.09.2014 | |||
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| US 2012134968 A1, 20.09.2012 | |||
| КОНВЕРТОПЛАН | 2011 |
|
RU2456209C1 |

