Способ определения стрелочных переводов и положения остряков стрелочных переводов относится к железнодорожному транспорту, а именно к способам и устройствам для идентификации элементов железнодорожного пути, в частности стрелочных переводов, и может быть использован в компьютеризированных дефектоскопических и путеизмерительных диагностических вагонах, автомотрисах и т.п., выполняющих неразрушающий контроль и диагностику рельсового пути с помощью имеющихся мобильных средств.
Известен механический способ определения положения остряков стрелочных переводов [1], заключающийся в том, что перемещают дефектоскопическое средство по рельсовому пути, зондируют его, измеряя вибрационные ускорения, создаваемые в дефектоскопическом средстве при его перемещении по стрелочному переводу, сохраняют результаты зондирований в дефектограмме, оценивают их и определяют фактическое положение остряков стрелочного перевода и текущее направление движения дефектоскопического средства.
Недостатком этого способа является его сложность, связанная с необходимостью установки средств автономных навигационных измерений и их обработке, для оценки скорости бокового перемещения. При прямом движении транспортного средства этот способ не обнаруживает стрелочный перевод.
Известен оптический способ определения положения остряков стрелочных переводов [2], заключающийся в том, что перемещают дефектоскопическое средство по рельсовому пути, зондируют его средствами видеонаблюдения, сохраняют результаты зондирований в дефектограмме, оценивают их и определяют фактическое положение остряков стрелочного перевода и текущее направление движения дефектоскопического средства, основанный на сравнении видео изображений стрелочных переводов с известными их видами.
Недостаток такого способа связан со сложностями получения таких изображений в разных условиях (снег, темнота и т.п.) и трудоемкости сравнения видеоизображений.
Наиболее близким к заявляемому является способ определения положения остряков стрелочных переводов, заключающийся в том, что перемещают дефектоскопическое средство по рельсовому пути, зондируя его, сохраняют результаты зондирований в дефектограмме, оценивают их и определяют фактическое положение остряков стрелочного перевода и текущее направление движения дефектоскопического средства. При этом могут использоваться вихретоковые (ВТ) [3], [4], ультразвуковые (УЗ) [5, стр. 241-271] или магнитодинамические (МД) [5 стр. 251] дефектоскопические средства.
В любом случае способы [3-5] основаны на попытке непосредственного обнаружения элементов рельсового перевода дефектоскопическим средством. Недостатками известных способов [3-5] является зависимость их результатов от многих факторов (ВТ методов - от зазора и загрязненности поверхности рельса, УЗ - от акустического контакта). Кроме того, сигналы от объектов рельсового пути (стыки, зазоры) в известных способах рассматривают обособленно друг от друга без учета их взаимного положения. Вопросы определения направления движения диагностического средства по фиксируемым дефектоскопическим сигналам в известных способах не рассматриваются.
Задачей, решаемой заявляемым способом, является обнаружение и определение стрелочного перевода и положения рельсового остряка косвенным методом - по положениям рельсовых стыков.
Для решения этой задачи в способе определения стрелочных переводов и положения остряков стрелочных переводов, заключающемся в том, что перемещают дефектоскопическое средство по рельсовому пути, зондируя его, сохраняют результаты зондирований в дефектограмме, оценивают их и определяют фактическое положение остряков стрелочного перевода и текущее направление движения дефектоскопического средства, при зондированиях обнаруживают рельсовые стыки, при оценке вычисляют относительные расстояния между стыками, сравнивают полученные величины с заранее известной матрицей шаблонов расстояний между стыками, определяют тип стрелочного перевода, а также фактическое положение остряков стрелочного перевода и текущее направление движения дефектоскопического средства.
Техническим результатом использования заявляемого способа является повышение достоверности (надежности) определения положения остряков стрелочных переводов.
Заявляемое изобретение иллюстрируют графические материалы.
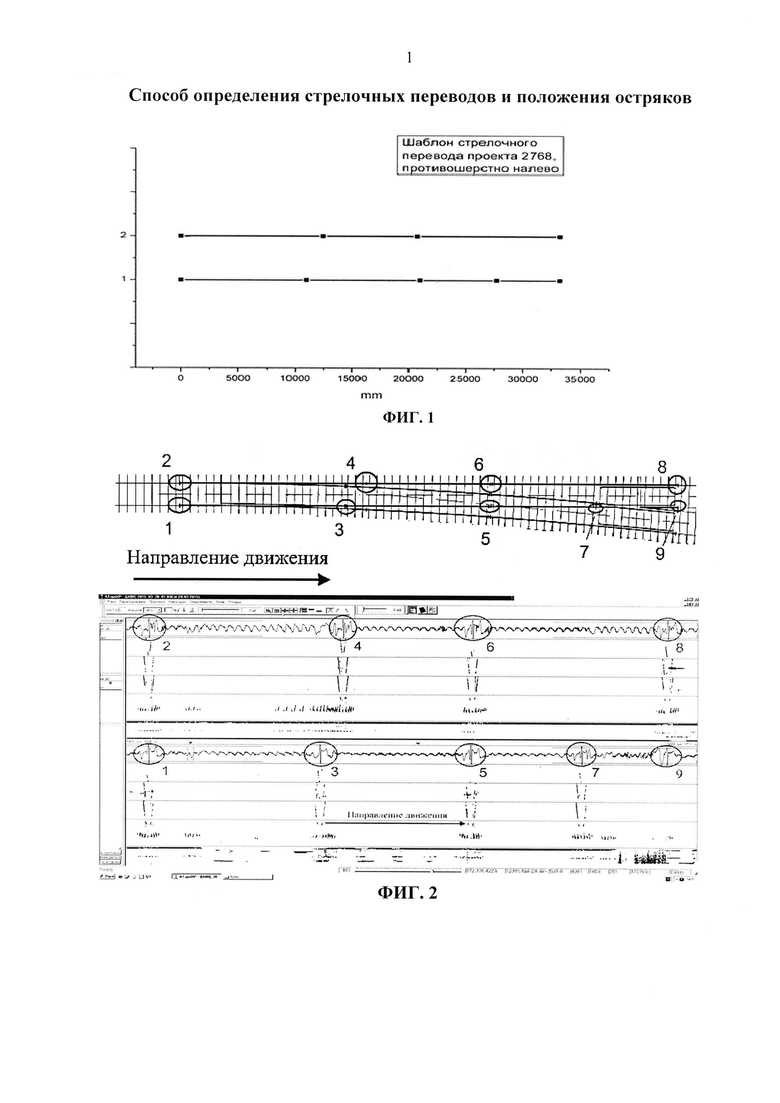
Фиг. 1 - положения рельсовых стыков у стрелочного перевода проекта 2768 (точнее «Стрелочный перевод типа Р65 марки 1/11 проекта 2768.00.000» по [7. Каталог продукции. Переводы для магистральных путей. Муромский стрелочный завод. 2013].
Фиг. 2 - схема стрелочного перевода проекта 2768 и дефектограммы каждой нити пути, измеренные МД, а ниже УЗ каналами дефектоскопического комплекса. Стыки рельсового пути на схеме стрелочного перевод на дефектограмме помечены одинаковыми цифрами.
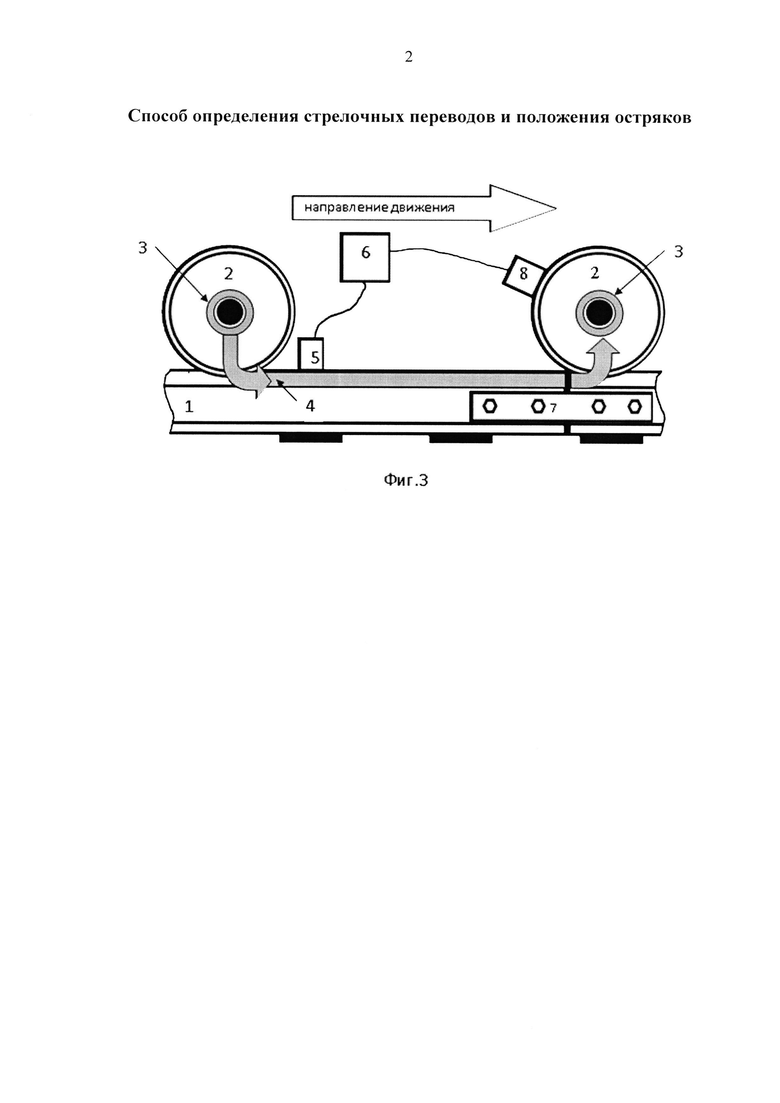
Фиг. 3 магнитный дефектоскоп на рельсах, где
1. Рельс.
2. Колеса дефектоскопического средства.
3. Катушки возбуждения магнитного поля в рельсах, установленные на осях колесных пар.
4. Магнитное поле.
5. Датчик магнитного поля.
6. Блок обработки.
7. Рельсовые накладки рельсового стыка.
8. Одометр.
Известны различные способы навигации рельсовых транспортных средств [6]: в том числе с использованием глобальных навигационных систем GPS и ГЛОНАС, одометров, и т.п. Ни один из этих способов не может считаться удовлетворительным из-за очевидного противоречия: большие расстояния перемещения (десятки-сотни километров) и высокие требования по точности при обнаружении дефектов (сантиметры и менее). В результате возникает потребность в периодической привязке координат транспортного средства к конструктивным элементам рельсового пути: пикетным столбам, маячным шпалам, рельсовым стыкам, стрелочным переводам и т.п. Кроме того, на стрелочных переводах необходимо отслеживать направление движения транспортного средства. При кажущейся простоте задача оказывается неочевидной. Например, акселерометр не обнаруживает стрелочный перевод при движении по прямой ветке. Способы [3-5] направлены на решение этих задач, однако их отличает невысокая точность, связанная со сложностью точного обнаружения элементов стрелочного перевода указанными дефектоскопическими средствами.
Элементы верхнего строения рельсового пути выполняются из ферромагнитных материалов (прежде всего - рельсовой стали) и имеют стыки с болтовыми соединениями или сварные. Эти стыки с разной достоверностью обнаруживаются ВТ, УЗ и МД дефектоскопическими средствами. Это позволяет определять на дефектограмме координаты указанных выше элементов пути в ручном или автоматическом режиме. Точность определения координат определяется в первую очередь характеристиками одометра, установленного на вагоне-дефектоскопе, и составляет порядка 10 см.
Каждый железнодорожный стрелочный перевод имеет определенные геометрические размеры, описанные в типовых проектах [7] http://murom-switch.ru/page/10 Каталог продукции Муромского стрелочного завода. В частности, проектами описываются расстояния между рельсовыми стыками. Анализ проектов показывает, что большинство из них предполагает реализацию одной из трех схем размещения отрезков рельса в стрелочном переводе. Схема 1: проекты 2750, 2830, 2882, 2751; схема 2: проекты 2768, 2764, 2759, 2802, 2851; схема 3: проекты 2769, 2766. Эти три схемы охватывают более 98% всех стрелочных переводов, применяемых на сети дорог ОАО «РЖД». В отдельных, редко встречающихся случаях, могут быть добавлены еще несколько типовых схем. Но это не меняет существо заявляемого способа, просто увеличится количество шаблонов - матриц, с которыми сравнивают последовательность сигналов диагностики.
С учетом того, что вагон может двигаться относительно одного и того же стрелочного перевода одним из четырех способов (пошерстно слева, пошерстно справа, противошерстно налево, противошерстно направо), на дефектограммах может присутствовать 3×4=12 типовых образов при проходе стрелок.
Обнаруженные рельсовые стыки проверяются на соответствие ожидаемым образам стрелочных переводов. Для этого берется набор из соседних стыковых элементов, попадающих в зону, длина которой определяется предполагаемой длиной стрелочного перевода, и вычисляется коэффициент взаимной корреляции К набора координат обнаруженных стыков с 12 координатами типовых образов стрелок:
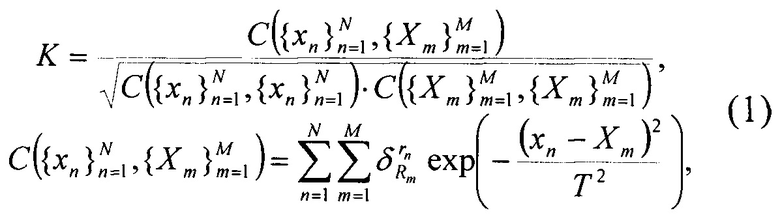
где
 - координаты обнаруженных на дефектограмме стыков;
- координаты обнаруженных на дефектограмме стыков;
 - координаты, взятые из шаблона;
- координаты, взятые из шаблона;
Т - коэффициент толерантности, в данном примере принят равным 500 мм (настраиваемый параметр);
rn - номер рельса из реального набора стыков;
Rn - номера рельса из шаблонного набора стыков;
 - символ Кронекера (равен 0, если rn и Rn не совпадают и 1, если совпадают).
- символ Кронекера (равен 0, если rn и Rn не совпадают и 1, если совпадают).
Если коэффициент взаимной корреляции К набора координат обнаруженных стыков с каким-либо из шаблонов превышает пороговое значение (например, 0.92), принимается решение о наличии стрелочного перевода. Кроме того, таким образом можно определить
1. Схему стрелки - к какому из 3 типовых, шаблонных схем относится обнаруженный стрелочный перевод.
2. Как именно пройдена стрелка:
- пошерстно слева или справа;
- противошерстно налево или направо.
Рассмотрим пример. На Фиг. 1 приведено положение рельсовых стыков стрелочного перевода схемы 2 - проекта 2768 (квадратными точками обозначены положения объектов стрелочного перевода - болтовых стыков и просвета (зазора) около крестовины, дающие четкий сигнал (отклик) МД метода контроля; на горизонтальной оси показаны координаты этих объектов в мм).
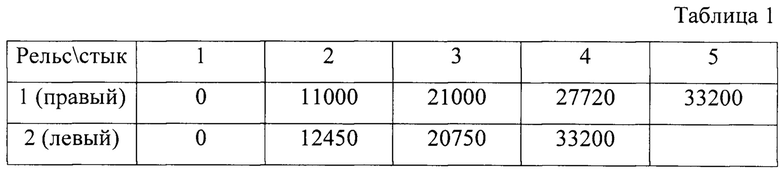
Рассмотрим шаблон стрелки в виде расстояний Xi между стыками. Шаблон соответствует стрелке проекта 2768, Таблица 1, Фиг. 2, пройденной противошерстно налево. В этом случае длина стрелочного перевода семейства составляет ~34 м.
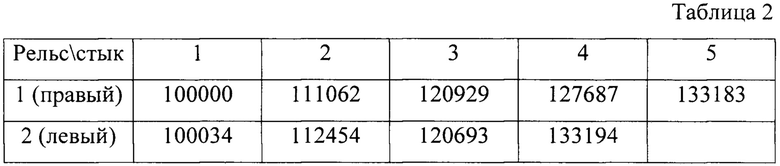
Пусть в ходе проезда на некотором отрезке длиной 34 м были обнаружены стыки со следующими абсолютными координатами хi, Таблица 2:
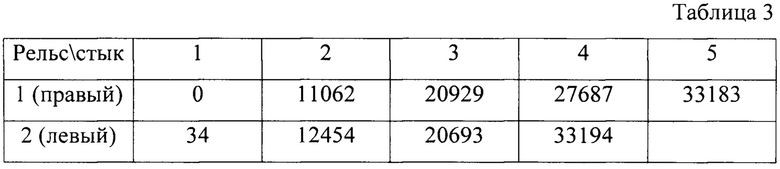
После нормировки - приведения первого стыка к нулевой отметке получим следующие результаты измерений xi, Таблица 3:
Подставляем два имеющихся набора координат из Таблиц 1 и 3 в формулу (1) для вычисления коэффициента корреляции: N=М=9,  - это первый столбец набор данных Таблицы 1,
- это первый столбец набор данных Таблицы 1,  - это первый столбец набор данных Таблицы 3; слагаемое в формуле учитывается, только если рельсы совпадают:
- это первый столбец набор данных Таблицы 3; слагаемое в формуле учитывается, только если рельсы совпадают:  - это второй столбец набор данных (1),
- это второй столбец набор данных (1),  - это второй столбец набор данных (3). Получаем коэффициент взаимной корреляции около 0.99, поскольку координаты в наборах х и X очень близки.
- это второй столбец набор данных (3). Получаем коэффициент взаимной корреляции около 0.99, поскольку координаты в наборах х и X очень близки.
Анализ МД, УЗ и ВТ методов дефектоскопии позволяет утверждать, что при обнаружении рельсовых стыков наиболее надежным является МД способ, который обеспечивает хорошую обнаруживающую способность и повторяемость результатов измерений. Сравнение МД и УЗ способов представлено на Фиг. 2, где видно, что УЗ метод дает менее достоверные результаты, а, кроме того, в существенной степени зависит от качества контакта электроакустических преобразователей с поверхностью рельса.
Рассмотрим возможность реализации заявляемого способа при использовании МД дефектоскопа.
Для работы заявляемого способа, Фиг. 3, на обе нити рельсов 1 устанавливаются известные две колесные пары 2, на осях которых установлены катушки 3 - возбуждения магнитного поля в рельсах 1 МД дефектоскопа. В более простом случае могут использоваться известные П-образные магниты. Между точками ввода магнитного поля 4 устанавливают приемные устройства 5 - индукционные катушки (или датчики Холла), воспринимающие неоднородности магнитного поля в рельсе 1. В качестве неоднородностей рассматриваются болтовые 7 стыки рельсов 1. При перемещении дефектоскопа в блоке обработки 6, содержащем компьютер с соответствующими контроллерами, обнаруживают рельсовые стыки и привязывают их координаты к рельсовому пути с помощью одометра 8 с абсолютными координатами xi. Нормируют полученные координаты и сравнивают их с матрицей шаблонов стрелок по формуле (1), как было показано выше. Определяют тип стрелочного перевода, фактическое положение остряков стрелочного перевода и текущее направление движения дефектоскопического средства.
Таким образом, заявляемый способ может быть реализован и позволяет надежно определить тип стрелочного перевода, положение остряков стрелочного перевода и текущее направление движения дефектоскопического средства косвенным способом.
Источники информации
1. Патент RU 2349480.
2. Патент ЕР 1747422.
3. Патент RU 44624.
4. Патент RU 48506.
5. Марков А.А., Кузнецова Е.А. Дефектоскопия рельсов. Формирование и анализ сигналов. Кн. 2. Расшифровка дефектограмм. - СПб.: Ультра Принт. 2014-332 стр.
6. Патент RU 150721.
7. http://murom-switch.ru/page/10. Каталог продукции Муромского стрелочного завода
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ И СИНХРОНИЗАЦИИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ | 2018 |
|
RU2680927C1 |
| Способ магнитного обнаружения регулярных объектов рельсов | 2017 |
|
RU2671368C1 |
| Способ определения расстояний между шпалами рельсового пути | 2019 |
|
RU2703802C1 |
| Способ определения длин рельсов уравнительных пролетов и мест временного восстановления плети по сигналам дефектоскопии | 2022 |
|
RU2785306C1 |
| СПОСОБ МАГНИТНОГО КОНТРОЛЯ СВАРНЫХ СТЫКОВ РЕЛЬСОВ | 2015 |
|
RU2586090C1 |
| Ультразвуковой способ обнаружения и оценки сварных стыков рельсов при высокоскоростном контроле | 2021 |
|
RU2764571C1 |
| Способ прогнозирования развитий аномалий в головке рельсов | 2019 |
|
RU2699942C1 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2013 |
|
RU2521095C1 |
| Способ динамической корректировки чувствительности дефектоскопических средств при высокоскоростном контроле длинномерных объектов | 2021 |
|
RU2774096C1 |
| Способ оценки работоспособности дефектоскопических средств при высокоскоростном контроле рельсов | 2021 |
|
RU2753810C1 |
Изобретение относится к железнодорожному транспорту, а именно к способам и устройствам для идентификации элементов железнодорожного пути, в частности стрелочных переводов, и может быть использовано в компьютеризированных дефектоскопических и путеизмерительных диагностических вагонах, автомотрисах, выполняющих неразрушающий контроль и диагностику рельсового пути с помощью имеющихся мобильных средств. Способ определения стрелочных переводов и положения остряков стрелочных переводов состоит в том, что перемещают дефектоскопическое средство по рельсовому пути, зондируя его, сохраняют результаты зондирований в дефектограмме, оценивают их и определяют фактическое положение остряков стрелочного перевода и текущее направление движения дефектоскопического средства. При зондированиях обнаруживают рельсовые стыки, при оценке вычисляют относительные расстояния между стыками, сравнивают полученные величины с заранее известной матрицей шаблонов расстояний между стыками, определяют тип стрелочного перевода, а также фактическое положение остряков стрелочного перевода и текущее направление движения дефектоскопического средства. В результате становится возможным по косвенным признакам (рельсовым стыкам) надежно определить тип стрелочного перевода, положение остряков стрелочного перевода и текущее направление движения диагностического средства. 3 ил., 3 табл.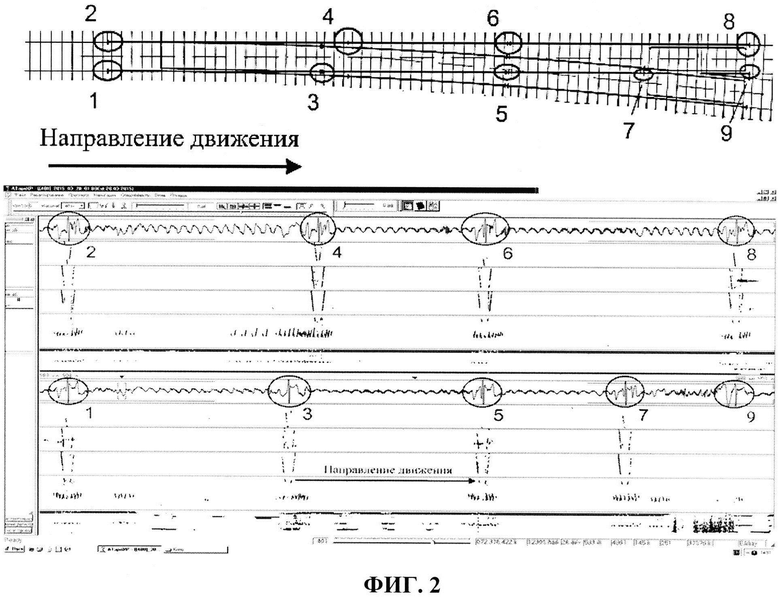
Способ определения стрелочных переводов и положения остряков стрелочных переводов, заключающийся в том, что перемещают дефектоскопическое средство по рельсовому пути, зондируя его, сохраняют результаты зондирований в дефектограмме, оценивают их и определяют фактическое положение остряков стрелочного перевода и текущее направление движения дефектоскопического средства, отличающийся тем, что при зондированиях обнаруживают рельсовые стыки, при оценке вычисляют относительные расстояния между стыками, сравнивают полученные величины с заранее известной матрицей шаблонов расстояний между стыками, определяют тип стрелочного перевода, а также фактическое положение остряков стрелочного перевода и текущее направление движения дефектоскопического средства.
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО ВКЛЮЧЕНИЯ ЗАПАСНОЙ НИТИ ДЛЯ КРУГЛОВЯЗАЛЬНЫХ ЧУЛОЧНЫХ АВТОМАТОВ С ВРАЩАЮЩИМСЯ ЦИЛИНДРОМ | 1935 |
|
SU44624A1 |
| Движитель с бесконечной колеей для повозок | 1944 |
|
SU69821A1 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2010 |
|
RU2446971C2 |
| СПОСОБ МАГНИТНОГО КОНТРОЛЯ СВАРНЫХ СТЫКОВ РЕЛЬСОВ | 2015 |
|
RU2586090C1 |
| US 4986498 A, 22.01.1991. | |||

