Изобретения относятся к области радиолокации и могут быть использованы в обзорных радиолокационных станциях (РЛС).
Для обеспечения контроля воздушного пространства необходимо обнаруживать цель с высокой вероятностью на границе контролируемого пространства, измерять ее координаты с требуемой точностью и сопровождать ее. Для увеличения скрытности работы РЛС и электромагнитной совместимости радиоэлектронных средств (РЭС) выполнять эти операции необходимо с минимальными затратами энергии зондирования пространства.
Наиболее кардинальное решение в снижении затрат энергии зондирования пространства дает способ обнаружения, измерения координат и сопровождения цели, основанный на пеленгации (определение угловых координат цели; см. Теоретические основы радиолокации, под ред. Я.Д.Ширмана, «Сов.радио», M.,1978, с.274, 2-й и 1-й абз.снизу) излучений бортовых РЭС из разнесенных в пространстве точек, на вычислении координат цели триангуляционным методом (Справочник по радиолокации под ред. М.Сколника, «Сов. радио», 1978, т.4, с.194, 2 абз. сверху и снизу). Этот способ функционирует и по отраженной энергии внешних источников (по переизлучениям), облучающих объект, в т.ч. источников природного характера (там же, с.213, последний абз. и с.214, 1-3 абз.).
Кроме того, при современном уровне насыщенности территорий радиолокационными и связными станциями, телецентрами, а в особых случаях и постановщиками помех, каждая цель может с большой частотой облучаться их энергий, что может также быть использовано для обнаружения цели в пассивном режиме.
Преимущество пассивного способа обзора пространства состоит в отсутствии затрат на его зондирование, что обеспечивает абсолютную скрытность его функционирования.
Недостатки этого способа состоят в следующем.
1. Для его реализации необходимо иметь несколько разнесенных позиций пеленгации, с жестко связанными режимами работы и управляемыми из общего пункта, что трудно реализуется в мобильном варианте.
2. При таком способе обзора и контроля пространства при наличии нескольких целей в осматриваемом пространстве неизбежно возникают ложные цели, устранить которые либо сложно, либо невозможно (там же, с.194, 2 абз. снизу).
3. Способ перестает функционировать при прекращении излучений, т.е. возможность обеспечения контроля пространства случайна и зависит от внешних неуправляемых факторов.
Исходя из этого в зонах повышенной ответственности использование для их обзора только пассивного способа невозможно.
Известен ряд технических решений, предусматривающих использование в активных РЛС пассивных каналов в качестве вспомогательных для повышения эффективности основного активного канала: для снижения затрат энергии зондирования при обнаружении цели в активном режиме, при измерении координат и сопровождении целей; например, способы по патентам РФ №№2137152, 2149421, 2194289, 2217773, 2226701, 2233456. Недостаток этих способов состоит в том, что для их реализации необходимо иметь пассивный канал пеленгации, а для вычисления координат запеленгованных целей нужно знание дальности, которую измеряют в активном режиме путем зондирования пеленгов (угловых направлений на запеленгованные цели).
Наиболее близкими способами являются способы радиолокационного обзора, описанные в патенте РФ №2400767 (п.1 - для первого варианта, п.2 - для второго варианта заявляемого технического решения). Способы основаны на обмене разнесенными в контролируемом пространстве независимо работающими РЛС радиолокационной информацией, полученной в активном режиме: о координатах просмотренных участков, в которых отсутствуют цели («пустые» направления), о координатах обнаруженных целей, данными об их распознавании, и на установлении с учетом полученной информации различных приоритетов просмотра участков пространства, входящих в зону ответственности РЛС, на увеличении затрат энергии на просмотр угловых направлений, в которых может находиться цель, за счет сокращения затрат, а при необходимости вплоть до их исключения, на просмотр «пустых» угловых направлений. Реализация способов, по существу, приводит к возникновению самоорганизующейся локальной сети из независимо работающих РЛС. Обмен информацией осуществляют непосредственно между РЛС (1-й способ) либо через банк данных (2-й способ). При этом эти РЛС могут отличаться диапазоном частот, дальностью действия, уровнем помехозащищенности, отдельные РЛС могут иметь пассивные каналы пеленгации и использовать их в качестве вспомогательных для повышения эффективности основного активного канала.
Преимущество этих способов состоит в том, что они позволяют сократить затраты энергии каждой из РЛС, вошедших в локальную сеть, на зондирование «пустых» угловых направлений.
Недостаток способов в том, что они не используют потенциальных возможностей РЛС, имеющих пассивные каналы пеленгации:
1) для вычисления координат целей, запеленгованных РЛС, имеющими пассивный канал, во всех случаях требуется зондирование каждого углового направления - пеленга;
2) РЛС, не имеющие пассивного канала, не могут использовать излучения бортовых радиоэлектронных средств (РЭС) или сигналы внешних РЭС, облучающих контролируемое пространство, для повышения эффективности основного активного канала, в т.ч. для сокращения затрат энергии на зондирование угловых направлений, содержащих цели, запеленгованные радиолокационными станциями, имеющими пассивный канал;
3) при переходе РЛС в пассивный режим обзора пространства (например, при угрозе удара высокоточного оружия) другие РЛС перестают получать от нее информацию, а она не сможет вычислить координаты запеленгованной ею цели.
Заявляемые изобретения направлены на устранение указанных недостатков.
Решаемой задачей (техническим результатом) является, таким образом, сокращение затрат энергии всех РЛС, вошедших в локальную сеть, на зондирование угловых направлений, содержащих цели, запеленгованные радиолокационными станциями, имеющими пассивный канал.
Задача решается на основе доступа к информации о запеленгованных целях пассивными каналами отдельных РЛС, всеми независимо работающими РЛС, установившими взаимные связи непосредственно или через банк данных (вошедшие в самоорганизующуюся локальную сеть).
Заявленный технический результат по первому варианту заявляемого технического решения достигается тем, что в способе радиолокационного обзора пространства, основанном на обмене радиолокационной информацией разнесенными в контролируемом пространстве независимо работающими радиолокационными станциями (РЛС), согласно изобретению РЛС, имеющие пассивные каналы пеленгации целей по излучениям бортовых радиоэлектронных средств (РЭС) или по отраженным сигналам внешних РЭС, облучающих контролируемое пространство, передают работающим в контролируемом пространстве РЛС информацию о пеленгах и параметрах излучений РЭС, по которым получены пеленги, на основании полученной информации на РЛС вычисляют координаты запеленгованных целей, а при необходимости устранения ложных целей зондируют направления, в которых они могут быть.
Заявленный технический результат по второму варианту заявляемого технического решения достигается тем, что в способе радиолокационного обзора пространства, основанном на обмене радиолокационными станциями (РЛС) радиолокационной информацией с банком данных, доступным для независимо работающих разнесенных в контролируемом пространстве РЛС, согласно изобретению, РЛС, имеющие пассивные каналы пеленгации целей по излучениям бортовых радиоэлектронных средств (РЭС) или по отраженным сигналам внешних РЭС, облучающих контролируемое пространство, передают в банк данных информацию о пеленгах и параметрах излучений РЭС, по которым получены пеленги, на основании полученной информации на РЛС вычисляют координаты запеленгованной цели, а при необходимости устранения ложных целей, зондируют направления, в которых они могут быть.
Суть заявленных способов основывается на следующем.
Каждая РЛС, вошедшая в связь с другими РЛС или с банком данных (имеющая или не имеющая пассивные каналы пеленгации), получит значения пеленгов на цель, излучающую или переизлучающую энергию соответственно бортовых или внешних РЭС (которую передали РЛС, имеющие пассивные каналы пеленгации целей), измеренных в пассивном режиме из разных точек пространства, радиолокационными станциями, имеющими пассивные каналы, методом триангуляции (Теоретические основы радиолокации, под ред. Я.Д.Ширмана, «Сов. радио», M.1978, с.494, последний абз.) может вычислить координаты запеленгованной цели. Параметры излучений РЭС могут быть использованы для устранения ложных целей, если этой возможности не будет, то при предполагаемом наличии ложных целей (в случае пересечения одного пеленга с несколькими другими) зондируют только те направления, в которых они могут быть. Сказанное иллюстрируется на рисунке, где показано, что пассивный канал К пеленгует цель Ц1 по сигналу C1 (пеленг П1.1), цель Ц2 - по сигналу С2 (пеленг П1.2), а пассивный канал K2 пеленгует цель Ц1 по сигналу C1 (пеленг П2.1), цель Ц2 - по сигналу С2 (пеленг П2.2). Координаты точек пересечения пеленгов П1.1 и П2.1 - это координаты цели Ц1, а пеленгов П1.2 и П2.2 - координаты цели Ц2. Пересечение пеленгов П1.2 и П2.1 дает координаты ложной цели ЛЦ, которую можно устранить путем измерения корреляции сигналов C1 и С2. Если сигналы можно различить (уровень их корреляции ниже порога), то ложная цель может быть устранена (т.к. пеленги П1.2 и П2.1 получены по разным сигналам, т.е. по разным целям) (там же, с.498); если сигналы не различаются, то ложная цель в показанной ситуации устраняется зондированием отдельных угловых направлений (зондируют направление П1.2 или П2.1), но и при этом будет экономия затрат энергии, поскольку зондирование будет необходимо только при малой избыточности информации, при невозможности различить сигналы РЭС, при неблагоприятном расположении запеленгованных целей и не всех направлений, а только сомнительных. Эти операции может выполнять любая РЛС, вошедшая в локальную сеть.
Таким образом, затраты энергии всех РЛС, вошедших в локальную сеть (в т.ч. и не имеющих пассивные каналы) на зондирование угловых направлений, содержащих цели, запеленгованные радиолокационными станциями, имеющими пассивный канал, будут уменьшены, чем и достигается заявленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ-ПОСТАНОВЩИКА ОТВЕТНОЙ ПОМЕХИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ, ОБЛУЧАЕМЫХ ПОСТАНОВЩИКОМ ОТВЕТНОЙ ПОМЕХИ | 2012 |
|
RU2531803C2 |
| Способ сопровождения траектории цели в активно-пассивной радиолокационной системе | 2021 |
|
RU2769566C2 |
| Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели | 2017 |
|
RU2667898C1 |
| Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели (варианты) и радиолокационный комплекс для его осуществления (варианты) | 2017 |
|
RU2663226C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2149421C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2001 |
|
RU2194289C2 |
| СПОСОБ УСТРАНЕНИЯ ЛОЖНЫХ ПЕЛЕНГОВ В ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПРИ ЕДИНИЧНОМ ОБЗОРЕ ВРАЩАЮЩЕЙСЯ АНТЕННО-ФИДЕРНОЙ СИСТЕМЫ | 2023 |
|
RU2817291C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ЗОНЫ ПРОСТРАНСТВА (ВАРИАНТЫ) | 2008 |
|
RU2405168C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2002 |
|
RU2218581C2 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
Предлагаемые изобретения относятся к радиолокации. Достигаемый технический результат - уменьшение затрат энергии всех радиолокационных станций (РЛС) на зондирование угловых направлений, содержащих запеленгованные цели. Указанный результат по первому варианту заявленного способа достигается тем, что в способе радиолокационного обзора пространства, основанном на обмене радиолокационной информацией разнесенными в контролируемом пространстве независимо работающими РЛС, РЛС, имеющие пассивные каналы пеленгации целей по излучениям бортовых радиоэлектронных средств (РЭС) или по отраженным сигналам внешних РЭС, облучающих контролируемое пространство, передают работающим в контролируемом пространстве РЛС информацию о пеленгах и параметрах излучений РЭС, по которым получены пеленги, на основании полученной информации на РЛС вычисляют координаты запеленгованной цели, а при необходимости устранения ложных целей зондируют направления, в которых они могут быть. По второму варианту заявленного способа указанный результат достигается тем, что в способе радиолокационного обзора пространства, основанном на обмене РЛС радиолокационной информацией с банком данных, доступным для независимо работающих разнесенных в контролируемом пространстве РЛС, РЛС, имеющие пассивные каналы пеленгации целей по излучениям бортовых радиоэлектронных средств (РЭС) или по отраженным сигналам внешних РЭС, облучающих контролируемое пространство, передают в банк данных информацию о пеленгах и параметрах излучений РЭС, по которым получены пеленги, на основании полученной информации на РЛС вычисляют координаты запеленгованной цели, а при необходимости устранения ложных целей зондируют направления, в которых они могут быть. 2 н.п. ф-лы, 1 ил.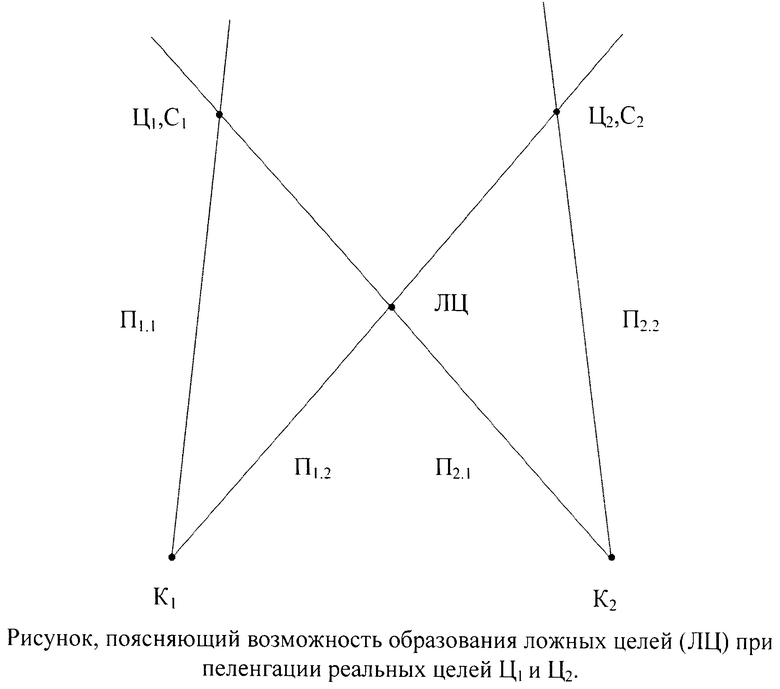
1. Способ радиолокационного обзора пространства, основанный на обмене радиолокационной информацией разнесенными в контролируемом пространстве независимо работающими радиолокационными станциями (РЛС), отличающийся тем, что РЛС, имеющие пассивные каналы пеленгации целей по излучениям бортовых радиоэлектронных средств (РЭС) или по отраженным сигналам внешних РЭС, облучающих контролируемое пространство, передают работающим в контролируемом пространстве РЛС информацию о пеленгах и параметрах излучений РЭС, по которым получены пеленги, непосредственно; на основании полученной информации на РЛС вычисляют координаты запеленгованной цели, при этом ложные цели исключают за счет использования параметров излучения РЭС или за счет зондирования отдельных угловых направлений их предполагаемого нахождения.
2. Способ радиолокационного обзора пространства, основанный на обмене радиолокационными станциями (РЛС) радиолокационной информацией с банком данных, доступным для независимо работающих разнесенных в контролируемом пространстве РЛС, отличающийся тем, что РЛС, имеющие пассивные каналы пеленгации целей по излучениям бортовых радиоэлектронных средств (РЭС) или по отраженным сигналам внешних РЭС, облучающих контролируемое пространство, передают в банк данных информацию о пеленгах и параметрах излучений РЭС, по которым получены пеленги, на основании полученной информации на РЛС вычисляют координаты запеленгованной цели, при этом ложные цели исключают за счет использования параметров излучения РЭС или за счет зондирования отдельных угловых направлений их предполагаемого нахождения.
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2008 |
|
RU2400767C2 |
| СПОСОБ КОНТРОЛЯ ВОЗДУШНОГО ПРОСТРАНСТВА, ОБЛУЧАЕМОГО ВНЕШНИМИ ИСТОЧНИКАМИ ИЗЛУЧЕНИЯ, И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285939C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2010 |
|
RU2439606C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ЦЕЛИ В МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2330306C1 |
| JP 2009162725 A, 23.07.2009 | |||
| JP 4635628 B2, 23.02.2011 | |||
| US 4806936 A1, 21.02.1989 | |||
| US 4305073 A, 08.12.1981 | |||

