Изобретение относится к радиоэлектронике и может быть использовано в многопозиционных системах получения и обработки радиолокационной информации, например, в системах пассивной радиолокации для обнаружения, определения координат и параметров цели.
Известен способ определения местоположения источника радиоизлучения (ИРИ), заключающийся в том, что осуществляют прием радиоизлучения источника с помощью N≥2 идентичных пунктов приема (ПП), измеряют первичные пространственные параметры принятых сигналов, вычисляют пеленги на ИРИ от каждого ПП, передают информацию по каналам связи на центральный вычислитель, который рассчитывает средневзвешенное значение координат местоположения ИРИ по всем точкам пересечения линий пеленгов и корректирует рассчитанные координаты (патент РФ №2258941, G01S 5/04, публ. 20.08.2005).
Однако для многопозиционных систем, использующих апертурные антенны с узкой диаграммой направленности, при применении указанного способа не обеспечивается одновременное измерение частотных, пространственных и энергетических параметров, принимаемых пунктами приема сигналов, что не позволяет получить интегральные характеристики, обеспечивающие высокую вероятность обнаружения и требуемую точность расчета координат.
В качестве прототипа выбран способ обнаружения и определения координат и параметров цели в многопозиционных радиолокационных системах, при котором осуществляют прием, первичную обработку и объединение радиолокационной информации, поступившей на различные пункты приема, производят "отождествление" данных и идентификацию цели, определяют координаты и траекторию цели ([1] с.5...17, 183...185, 192...193, 214...223, 239...243, 293...304, [2] с.10...25, 43...46).
В известном способе при асинхронном вращении антенн различных ПП прием сигналов происходит в разное время и с разных направлений, что может приводить к неопределенности или пропуску цели при обнаружении и объединении информации, а также при решении задачи "отождествления" данных и идентификации цели, так как за время между приемом сигнала разными пунктами изменяются положение цели, направление излучения, условия приема или распространения. Кроме того, могут изменяться параметры сигнала.
Действительно, если при большом временном интервале между поступлением сигналов на различные пункты приема изменилось отношение сигнал - шум, например, под действием помехи, перемещения диаграммы источника или флуктуаций сигнала, то возможны ситуации пропуска цели или при трехальтернативном обнаружении - ситуация неопределенности ([1] с.9...11, [3] с.73...76).
Объединение информации, получаемой в разное время в разных элементах пространства, так же, как и "отождествление" данных, полученных в результате измерения параметров каждой цели, требует принятия определенных условных гипотез или критериев относительно принадлежности информации и данных к одной и той же цели ([1] с.5, 293...300). При большом числе целей это приводит не только к усложнению алгоритма обработки, но и к дополнительным ошибкам при обработке массивов информации, получаемой в разное время в разных элементах пространства.
Перестройка радиотехнических параметров излучаемого сигнала также приводит к пропуску цели и значительно снижает вероятность правильного обнаружения.
Рост ошибок измерения координат в случае разновременного пеленгования цели связан с возможным перемещением цели между моментом пеленгации и моментом совместной привязки пеленгов.
В случае синхронно-синфазного вращения антенн ПП оси диаграмм направленности указанных антенн параллельны и одинаково направлены в любой момент времени. Это позволяет уменьшить недостатки, отмеченные при описании прототипа, за счет уменьшения разброса по направлению и времени поступления сигналов.
Однако если расстояние до цели одного порядка с расстоянием между пунктами приема, то направления распространения сигналов, поступающих на указанные пункты, нельзя считать параллельными, а время между приемом сигнала достаточно велико. Это также может приводить к неопределенности или пропуску цели при обнаружении, объединении информации, "отождествлении" параметров и идентификации цели в случае изменения положения цели, направления излучения, условий приема или распространения, а также при изменении параметров сигнала.
Таким образом, недостатком прототипа можно считать невысокую вероятность правильного обнаружения и идентификации цели, снижение точности определения координат, низкую вероятность обнаружения и определения координат цели с перестройкой параметров.
Предлагаемым изобретением решается задача повышения вероятности правильного обнаружения и идентификации цели, повышения точности определения координат, а также повышения вероятности обнаружения и определения координат цели с перестройкой параметров.
Решение задачи достигается тем, что задают координаты условного центра многопозиционной радиолокационной системы, определяют координаты пунктов приема относительно выбранного условного центра, осуществляют управление системами вращения каждого из пунктов приема таким образом, чтобы обеспечить наведение антенн в одну точку, находящуюся на заданном расстоянии от условного центра - радиуса обзора и перемещающуюся с заданной угловой скоростью - скоростью обзора. Указанные радиус и скорость обзора могут изменяться в зависимости от радиолокационной обстановки. В каждом пункте приема осуществляют прием, первичную обработку и измерение параметров сигнала, определяют направление (пеленг) и время поступления сигнала при помощи системы передачи данных, передают всю полученную информацию в главную управляющую ПЭВМ, при помощи которой выполняют объединение данных и "отождествление" полученной информации, производят обнаружение и идентификацию цели, определяют координаты и траекторию цели, а также, при необходимости, осуществляют коррекцию заданных радиуса и скорости обзора.
Заявляемый способ обнаружения и определения координат и параметров цели в многопозиционной радиолокационной системе поясняется чертежами.
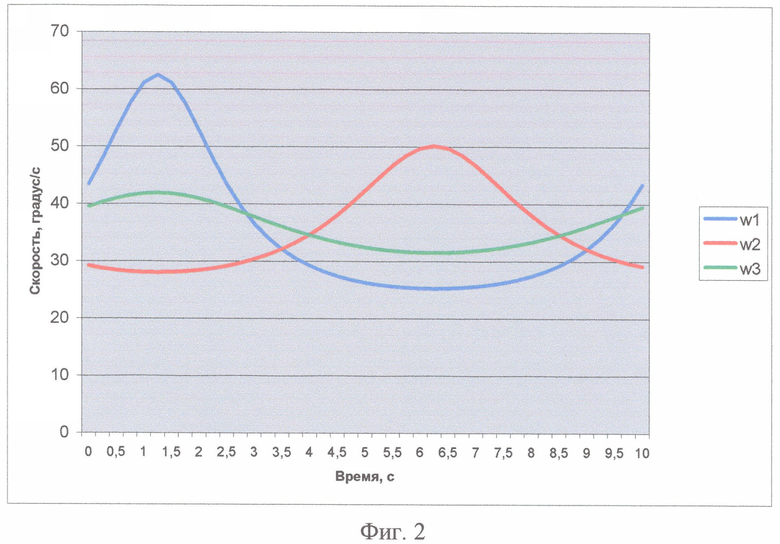
На фиг.1 показаны диаграммы направленности трех пунктов приема с координатами (x1; y1), (х2; y2), (х3; y3) относительно выбранного условного центра (0; 0).
На фиг.2 приведена зависимость угловых скоростей антенных систем трех пунктов приема ω1, ω2, ω3 от времени в установившемся режиме при радиусе обзора r=100 км, скорости обзора ω=6 об/мин и координатах пунктов приема x1=30 км, y1=30 км, x2 = минус 20 км, y2 = минус 20 км, x3=10 км, y3=10 км.
Способ осуществляется следующим образом.
Предварительно определяют координаты и осуществляют привязку каждого пункта приема к направлению на север, а также синхронизацию их часов с эталоном точного времени. Работа начинается с задания координат условного центра многопозиционной системы, который может быть выбран в любой точке, например, внутри базы, образованной пунктами приема, а также может совпадать с координатами одного из пунктов приема. Затем определяют координаты каждого пункта приема относительно условного центра системы.
Главная управляющая ПЭВМ в соответствии с предварительными данными радиолокационной обстановки или командами оператора задает начальные радиус r и скорость обзора ω, а также значение угла обзора β в начальный момент времени и передает эти значения через систему передачи данных в управляющие ПЭВМ пунктов приема.
В начале работы может быть установлен средний радиус обзора. Можно также плавно изменять радиус обзора, проходя весь диапазон от минимальной к максимальной дальности обнаружения.
Управляющая ПЭВМ каждого из пунктов приема в соответствии с полученными данными и собственными координатами вырабатывает на основе имеющегося алгоритма сигналы управления системой вращения антенн пункта приема. В переходном режиме управляющая ПЭВМ обеспечивает перевод системы вращения в режим обзора.
Значение угла поворота системы вращения каждого из пунктов приема в режиме обзора определяется следующим образом:
 ,
,
где β - угол обзора.
Отсюда можно получить, что в режиме обзора с установившейся скоростью обзора ω и радиусом обзора r угловая скорость вращения антенн каждого i-того пункта приема с координатами xi; yi определяется выражением:
 ,
,
где t - время.
Приведенные на фиг.2 зависимости рассчитаны в соответствии с формулой (2) для установившегося режима обзора.
В результате вращение антенн в общем случае происходит с различными переменными для каждого пункта приема скоростями, а оси диаграмм направленности пересекаются в одной точке, причем указанная точка перемещается на расстоянии радиуса обзора вокруг условного центра многопозиционной системы с угловой скоростью обзора. Таким образом, обеспечивается пространственное совмещение в определенной зоне диаграмм направленности разнесенных пунктов приема (фиг.1).
При наличии сигнала от цели, принятого пунктом приема, информация, содержащая угловые координаты, время поступления и, при необходимости, параметры сигнала, передается посредством аппаратуры системы передачи данных в главную управляющую ПЭВМ.
Главная управляющая ПЭВМ производит анализ информации, поступившей от разных пунктов приема, в частности определяет число пунктов n, принявших сигнал, а также определяет интервал времени τ между моментом поступления сигнала на первый и последний из указанных пунктов. При наличии определенного числа таких пунктов n≥no может быть сделан вывод об обнаружении цели, так как вероятность случайного поступления сигналов от различных одиночных целей в узком интервале времени и практически с одного направления невысока, как и вероятность случайного превышения выбранного уровня "ложных тревог" одновременно в нескольких пунктах приема. Например, может быть выбрано значение no>m/2, где m - общее число пунктов приема.
Главная управляющая ПЭВМ производит объединение данных, полученных от разных пунктов приема, и решает задачу "отождествления параметров" сигналов, поступивших в узком временном диапазоне τ для уточнения вывода об обнаружении и идентификации цели. Решение этой задачи существенно упрощается за счет исключения из алгоритма обработки массивов параметров сигналов от целей с других направлений. В результате цель идентифицируется как одиночная или групповая и ПЭВМ приступает к определению и уточнению координат цели, например, методом триангуляции ([2] стр.209, 210).
После выбора приоритетной цели, определения координат и расстояния до нее можно установить радиус обзора, равный этому расстоянию, что позволит максимально реализовать заявленные преимущества.
Следует отметить, что приближенно расстояние до цели можно получить, измеряя значение интервала времени τ для каждой цели при переменном радиусе обзора. При минимальном значении указанного интервала цель находится на расстоянии, близком к радиусу обзора.
Таким образом, благодаря пространственной и временной локализации источника сигнала достигаются следующие преимущества.
Во-первых, повышается вероятность правильного обнаружения, так как исключается возможность поступления сигналов от различных целей с разных направлений или в разные моменты времени и, следовательно, снижается вероятность пропуска цели, состояния неопределенности, связанные с быстрым перемещением цели, изменением направления излучения, условий приема или распространения сигнала.
Во-вторых, повышается точность идентификации цели, так как исключаются ошибки при решении задачи "отождествления" данных, полученных в разное время и в разных элементах пространства.
В-третьих, повышается точность определения координат цели, так как за время, прошедшее между поступлением сигналов от цели на различные пункты приема, положение источника сигнала практически не меняется.
В-четвертых, прием всеми пунктами приема одной и той же временной реализации сигнала повышает вероятность правильного обнаружения при перестройке параметров сигнала.
Требуемые диапазоны скоростей и динамика системы вращения могут быть достигнуты, например, при использовании в системе вращения частотно-управляемого электропривода переменного тока, который позволяет обеспечить диапазон регулирования порядка 1:1000 при мощности до 3,7 кВт и времени разгона и торможения не более 2 с.
При расстоянии до цели, близком к радиусу обзора г, преимущества предлагаемого способа проявляются максимально, при этом время между приемом сигнала пунктами приема минимально. Для целей, находящихся дальше или ближе радиуса обзора r, указанное время несколько увеличивается, однако вероятность правильного обнаружения и идентификации цели остается выше, чем у прототипа.
Максимальная дальность обнаружения ограничивается чувствительностью приемника, минимальная дальность обнаружения для предлагаемого способа может ограничиваться динамикой системы вращения антенн. Следует, однако, отметить, что при дальности до цели меньше минимальной, как и при переходных процессах выхода на установившийся режим обзора, системы вращения продолжают работу в синхронно-синфазном или асинхронном режиме. Таким образом, в этих случаях вероятность правильного обнаружения и идентификации цели будет, по крайней мере, не хуже, чем у прототипа.
Источники информации
1. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М., «Радио и связь», 1981 г.
2. Кондратьев B.C., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы. Под редакцией проф. В.В.Цветнова. М., «Радио и связь», 1986 г.
3. Обнаружение радиосигналов. Под редакцией д.т.н. А.А.Колосова, М., «Радио и связь», 1989 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ многопозиционной радиолокации | 2021 |
|
RU2770827C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ РАДИОЛОКАЦИОННЫМ КОМПЛЕКСОМ И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2448347C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ НА БАЗЕ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С УПРАВЛЯЕМЫМИ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ | 2013 |
|
RU2543511C1 |
| СПОСОБ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2332684C1 |
| Способ определения координат источников радиосигналов с взаимно перекрывающимися спектрами | 2024 |
|
RU2834966C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| СПОСОБ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ | 2023 |
|
RU2815918C1 |
| СПОСОБ И УСТРОЙСТВО КОРРЕЛЯЦИОННОГО ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ | 2006 |
|
RU2350977C2 |
| Способ отождествления целевой информации трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников, располагаемых на качающемся носителе | 2023 |
|
RU2816259C1 |
| СПОСОБ РАДИОЛОКАЦИИ НА ОСНОВЕ МНОГОПОЗИЦИОННЫХ СИСТЕМ ПЕРЕДАЧИ И ПРИЕМА | 2024 |
|
RU2840797C1 |
Изобретение может быть использовано в многопозиционных системах, например в системах пассивной радиолокации для обнаружения, определения координат и параметров цели. Сущность изобретения: задают координаты условного центра многопозиционной системы и осуществляют управление системами вращения каждого из пунктов приема, обеспечивая наведение антенн в одну точку, находящуюся на заданном расстоянии от условного центра - радиусе обзора - и перемещающуюся с заданной угловой скоростью - скоростью обзора. В каждом пункте приема осуществляют прием, обработку и измерение параметров сигнала, определяют направление и время поступления сигнала, передают всю полученную информацию в главную управляющую персональную электронно-вычислительную машину (ПЭВМ), выполняют объединение данных, «отождествление» параметров и производят идентификацию цели, затем определяют координаты и траекторию цели. Достигаемым техническим результатом изобретения является повышение вероятности правильного обнаружения и идентификации цели, в том числе и цели с перестройкой параметров. 2 ил.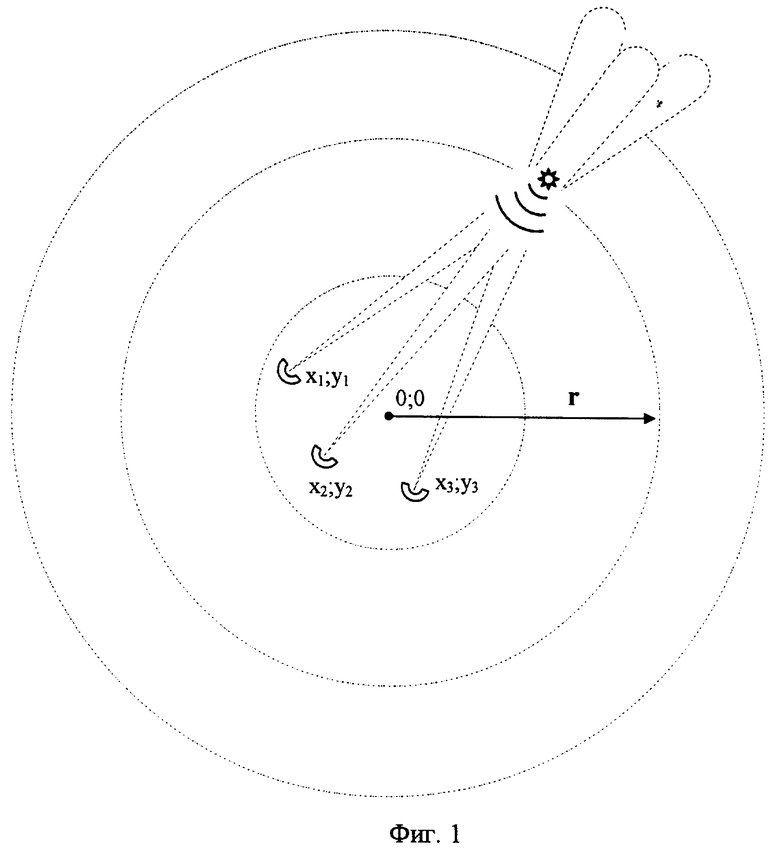
Способ обнаружения и определения координат и параметров цели в многопозиционной радиолокационной системе, заключающийся в том, что определяют координаты каждого пункта приема многопозиционной радиолокационной системы, производят объединение радиолокационной информации, поступившей на различные пункты приема, отождествление данных и идентификацию цели, отличающийся тем, что осуществляют привязку каждого пункта приема к направлению на север, а также синхронизацию их часов с эталоном точного времени, задают координаты условного центра многопозиционной системы, определяют координаты каждого пункта приема относительно выбранного условного центра, осуществляют управление системы вращения антенн каждого из пунктов приема таким образом, чтобы обеспечить наведение антенн в одну точку, находящуюся на заданном направлении от условного центра - радиусе обзора - и перемещающуюся с заданной угловой скоростью - скоростью обзора, в каждом пункте приема осуществляют прием, обработку и измерение параметров сигнала, определяют направление и время поступления сигнала, передают полученную информацию в главную управляющую персональную электронно-вычислительную машину (ПЭВМ), при помощи которой выполняют объединение данных и отождествление параметров, производят обнаружение и идентификацию одиночной или групповой цели по сигналам, поступившим в интервале времени между приемами сигнала первым и последним пунктом приема, определяют координаты и траекторию цели, кроме того, в главной ПЭВМП в соответствии с предварительными данными радиолокационной обстановки задают многопозиционной радиолокационной системе начальный радиус и скорость обзора, с возможностью их коррекции, а также значение угла обзора в начальный момент времени и передают эти значения через систему передачи данных в управляющие ПЭВМ каждого пункта приема.
| ШИРМАН Я.Д., МАНЖОС В.Н | |||
| Теория и техника обработки радиолокационной информации на фоне помех | |||
| - М.: Радио и связь, 1981, с.5-17, 183-185, 192, 193, 214-223, 239-243, 293-304 | |||
| RU 94014952 А1, 20.04.1996 | |||
| RU 98106642 А, 20.02.2000 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА, СПОСОБ ИДЕНТИФИКАЦИИ АБОНЕНТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ И СИСТЕМА РАДИОСВЯЗИ АБОНЕНТОВ С ЦЕНТРАЛЬНОЙ СТАНЦИЕЙ С ИДЕНТИФИКАЦИЕЙ АБОНЕНТОВ И ОПРЕДЕЛЕНИЕМ ИХ МЕСТОПОЛОЖЕНИЯ | 1997 |
|
RU2126174C1 |
| ТЕРКА ДЛЯ СВЕКЛЫ | 1933 |
|
SU38509A1 |
| WO 2006114426 А1, 02.11.2006 | |||
| Синусно-косинусный вращающийся трансформатор | 1989 |
|
SU1690108A1 |
| US 2005288037 А1, 29.05.2005 | |||
| US 2005105600 Al, 19.05.2005. | |||

