Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС).
РЛС предназначены для управления воздушным движением и для контроля воздушного пространства. Необходимым условием обеспечения этого управления и контроля является знание координат всех целей, находящихся в зоне ответственности радиолокационной станции. Для этого измеренные координаты целей при первичном обнаружении должны уточняться в процессе их движения, т.е. цели должны сопровождаться.
Известен способ обзора пространства и сопровождения траекторий целей, основанный на обнаружении цели в режиме обзора и выработке стробов сопровождения траекторий целей для их сопровождения (С.З. Кузьмин «Основы проектирования систем цифровой обработки радиолокационной информации», М., «Радио и связь», 1986, с. 108-110, с 115, 1 абз. сверху). Переход от режима обзора к режиму сопровождения начинается с обнаружения РЛС новой отметки (новой цели), которую принимают за начальную отметку предполагаемой траектории новой цели.
На основе априорных данных об этой цели формируют строб первичного захвата для второго обзора, на основании которого уточняют параметры строба для третьего обзора. Если в этот строб попала отметка в третьем обзоре, то она считается принадлежащей обнаруживаемой траектории, по ее положению в стробе 3-го обзора уточняют параметры строба на 4-й обзор и т.д. После выполнения установленного критерия по числу отметок, попавших в j последовательно образованных стробов, принимают решение об обнаружении траектории, и ее передают на сопровождение.
Известны способы использования энергии излучения бортовых источников энергии целей и энергии отражений за счет подсвета цели внешним (посторонним) радиоэлектронным средством (РЭС).
Известен способ радиолокационного обнаружения и сопровождения цели, основанный на том, что сопровождение цели ведут с помощью длинноволновой РЛС с определением дальности до цели в активном ее режиме и в пассивном - определение пеленгов по излучениям цели (патенты RU №2137152, №2194289).
Известен способ контроля воздушного пространства, основанный на том, что излучают сигнал РЛС только в те направления зоны, в которых обнаружена отраженная энергия внешних РЭС (патент RU №2215303).
Известен способ радиолокационного обнаружения и сопровождения цели, основанный на том, что осуществляют обнаружение цели в активном режиме работы РЛС в запеленгованном по излучениям цели направлении и ведут сопровождение (патент RU №2149421).
Недостаток этих способов состоит в необходимости использования активного режима работы РЛС при сопровождении.
Известен способ определения координат целей, основанный на приеме прямого излучения источника внешнего РЭС и отраженного от цели (патент RU №2226701); его недостаток - в необходимости приема прямого излучения.
Известен способ обнаружения и определения координат целей, основанный на использовании излучений РЛС, расположенных за горизонтом, с известными координатами (например, РЛС сопредельных государств) (патент RU №2530808); основной его недостаток - в необходимости знания координат РЛС и ее параметров.
Наиболее близким способом является триангуляционный (Справочник по радиолокации, под ред. Сколника. М: Сов. Радио, 1978, т. 4, с. 194, 2-й абз. снизу), позволяющий при наличии разнесенных в пространстве n≥2 пеленгаторов кроме определения пеленгов вычислять дальность до цели из соотношений треугольника, образованного пересекающимися пеленгами и линией, соединяющей точки расположения пеленгаторов.
Недостаток этого способа состоит в том, что при использовании его в РЛС, оснащенной пеленгаторами, нужно проводить с их помощью осмотр строба сопровождения в одном ограниченном интервале времени, особенно в случае дискретного характера излучений, что исключает возможность независимого сопровождения ими целей, а это усложняет управление ими; кроме того для этого способа характерна возможность появления ложных целей (там же, а также с. 203, 2-й абз. сверху).
Решаемой технической проблемой заявляемого изобретения (техническим результатом) является сокращение времени использования активного режима РЛС, оснащенной пеленгаторами, при независимом сопровождении ими траектории излучающей или подсвечиваемой внешним РЭС цели и исключение ложных целей.
Техническая проблема решается на основе использования триангуляционного способа при независимой работе пеленгаторов и совместно с активной РЛС.
Заявленный технический результат достигается тем, что в способе сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели, основанном на пеленгации ее по излучениям или отражениям с помощью n≥2 разнесенных в пространстве пеленгаторов и на вычислении дальности до цели, согласно изобретению данные о пеленгах передают на активную радиолокационную станцию, при этом на РЛС формируют графики изменения пеленга из точек расположения пеленгаторов, путем экстраполяции определяют положения пеленгов для различных моментов времени, на их основе вычисляют дальности до цели, ведут сопровождение в пассивном режиме по пеленгам и дальности траектории, обнаруженной в активном режиме, эпизодически уточняя ее положение в активном режиме.
Также тем, что уточняют положение траектории при изменении параметров излучения цели или при перерыве в излучении.
Заявленный технический результат достигается тем, что в состав активной радиолокационной станции согласно изобретению в дополнение к активному каналу введены n≥2 разнесенных в пространстве пеленгаторов излучающей или подсвечиваемой внешним радиоэлектронным средством цели, выходы пеленгаторов соединены со входами РЛС.
Также тем, что один из пеленгаторов конструктивно совмещен с аппаратурой РЛС.
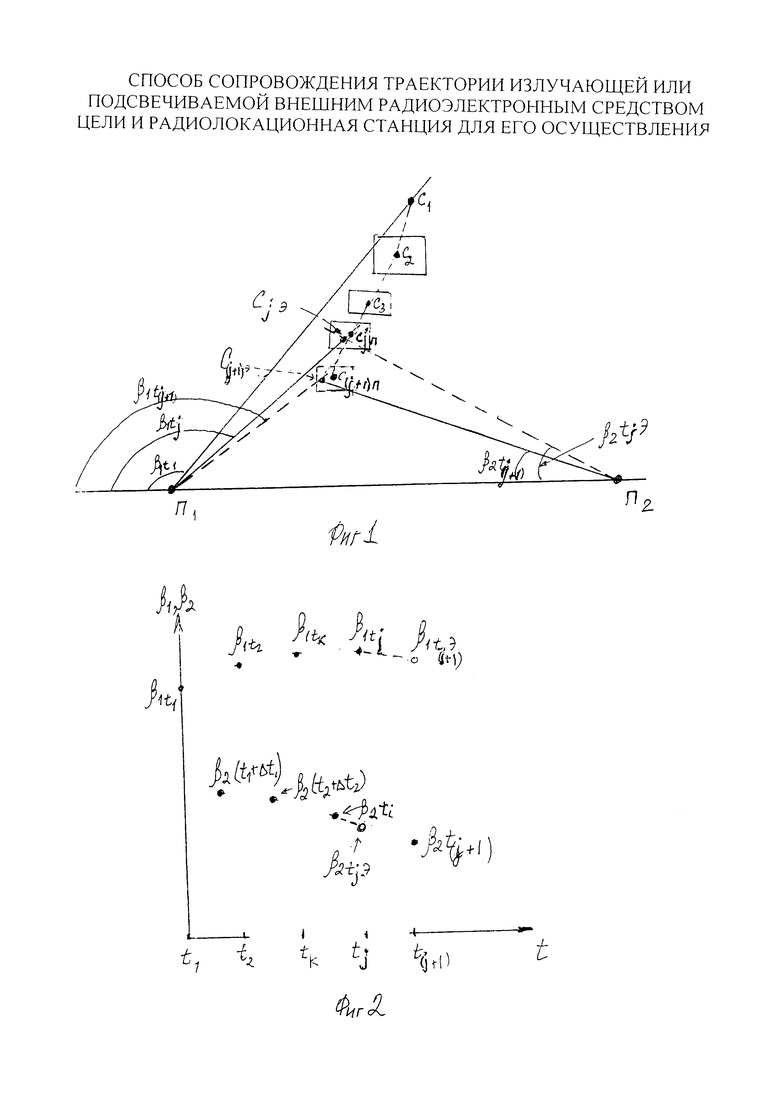
Изобретения иллюстрируются чертежами. На фиг. 1 показан процесс обнаружения траектории цели в активном режиме и переход к сопровождению ее в пассивном режиме; на фиг.2 - процесс формирования графиков изменения пеленга цели из точек расположения пеленгаторов П1 и П2.
Поясним суть изобретений на примере работы двухкоординатной активной РЛС, в которую в дополнение к активному радиолокационному каналу введено n=2 пассивных (разнесенных в пространстве пеленгаторов П1 и П2).
Рассмотрим начальный вариант работы по новой цели: пусть направления лучей антенн активного и пассивного канала (П1 совпадают (для варианта, когда один из пеленгаторов конструктивно совмещен с аппаратурой РЛС) и момент пеленгации цели с помощью П1 опережает П2.
При обнаружении в момент времени t1 активным каналом РЛС первой отметки C1 от излучающей цели с помощью пассивного канала П1 определяют пеленг на эту цель β1t1 (фиг. 1, фиг. 2). К моменту выполнения критерия обнаружения траектории цели в активном режиме (выполнение критерия с j стробами, см. л. 1) по данным пассивного канала будет построен график изменения пеленга, состоящий из j точек; аналогично будет построен график по данным пассивного канала П2, состоящий из (j-1) точек (при равенстве периодов обзора П1 и П2) (см. фиг. 2).
По данным активного канала РЛС к моменту времени tj будет принято решение об обнаружении траектории цели и о передаче ее на сопровождение, будет выставлен строб сопровождения с прогнозируемым положением цели С j п в центре строба. Начиная с этого момента времени, активный режим РЛС по этой цели не используют.
В момент времени tj по данным пеленгатора П1 определен азимут β1tj (фиг. 1, фиг. 2), а по данным пеленгатора П2 имеются данные только на момент ti<tj, поэтому за счет экстраполяции его графика определяют  (пунктир на фиг. 2). Точку пересечении пеленгов С j э принимают за положение цели в момент времени tj, учитывают ее параметры для установки строба для момента времени t(j+1). В момент времени t(j+1) по данным пеленгатора П2 определен азимут β2t(j+1), а данные от пеленгатора П1 имеются только на момент tj<t(j+1), поэтому за счет экстраполяции его графика определяют β1t(j+1)э (пунктир на фиг. 2). Точку пересечении пеленгов С принимают за положение цели в момент времени t(j+1) и учитывают ее параметры для установки строба для момента времени t(j+2) и т.д.
(пунктир на фиг. 2). Точку пересечении пеленгов С j э принимают за положение цели в момент времени tj, учитывают ее параметры для установки строба для момента времени t(j+1). В момент времени t(j+1) по данным пеленгатора П2 определен азимут β2t(j+1), а данные от пеленгатора П1 имеются только на момент tj<t(j+1), поэтому за счет экстраполяции его графика определяют β1t(j+1)э (пунктир на фиг. 2). Точку пересечении пеленгов С принимают за положение цели в момент времени t(j+1) и учитывают ее параметры для установки строба для момента времени t(j+2) и т.д.
В рассмотренном примере принято, что определение пеленга с помощью П1 происходит одновременно с обнаружением в активном режиме первой отметки от цели. Это совпадение не имеет значения для функционирования способа; для исключения активного режима из процесса сопровождения важно, чтобы к моменту времени tj принятия решения об обнаружении траектории шел процесс построения графиков изменения пеленга, что всегда будет выполняться, если период обзора пространства с помощью пеленгаторов будет не больше, чем РЛС; это обеспечит возможность начала сопровождения в пассивном режиме сразу же после принятия решения об обнаружении траектории в активном режиме. Задержка в построении графиков вызовет задержку процесса сопровождения в пассивном режиме, что снизит эффективность способа в сокращении времени использования активного режима.
Дополнение признаков триангуляционного способа другими признаками в заявляемом способе устраняет указанную выше проблему ложных целей, присущую триангуляционному способу, поскольку обнаружение траектории реальной цели осуществляют в результате обзора пространства с помощью РЛС в активном режиме и потому в заявляемом способе сопровождают траектории только реальных целей (т.е. точки пересечения пеленгов, соответствующие ложным целям, устраняются при обзоре пространства с помощью РЛС в активном режиме).
Таким образом, процесс сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели осуществляют без использования активного режима РЛС и при этом устраняются ложные цели. Этим достигается заявленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели (варианты) и радиолокационный комплекс для его осуществления (варианты) | 2017 |
|
RU2663226C1 |
| Способ определения траектории маневрирующего воздушно-космического объекта | 2022 |
|
RU2818964C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2149421C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2002 |
|
RU2218581C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ЦЕЛИ | 2011 |
|
RU2470319C1 |
| Способ сопровождения траектории цели в активно-пассивной радиолокационной системе | 2021 |
|
RU2769566C2 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2012 |
|
RU2521825C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2001 |
|
RU2194289C2 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
Изобретения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС). Достигаемый технический результат - сокращение времени использования активного режима РЛС, оснащенной пеленгаторами, при независимом сопровождении ими траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели и исключение ложных целей. Указанный результат достигается за счет того, что способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели основан на пеленгации ее по излучениям или отражениям с помощью n≥2 разнесенных в пространстве пеленгаторов и на вычислении дальности до цели, при этом, при обзоре пространства с помощью активной радиолокационной станции (РЛС) в активном режиме, на основании данных о пеленгах, переданных в РЛС от n≥2 пеленгаторов, осуществляющих независимое сопровождение пеленгов целей, устраняют точки пересечения пеленгов, соответствующие ложным целям, на основании переданных данных о пеленгах реальных целей формируют графики изменения пеленга из точек расположения пеленгаторов, путем экстраполяции определяют значения пеленгов для различных моментов времени, на их основе вычисляют дальности до цели, ведут сопровождение в пассивном режиме по пеленгам и дальности траектории, эпизодически уточняя ее положение в активном режиме, кроме того, уточняют положение траектории при изменении параметров излучения цели или при перерыве в излучении. 1 з.п. ф-лы, 2 ил.
1. Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели, основанный на пеленгации ее по излучениям или отражениям с помощью n≥2 разнесенных в пространстве пеленгаторов и на вычислении дальности до цели, отличающийся тем, что при обзоре пространства с помощью активной радиолокационной станции (РЛС) в активном режиме, на основании данных о пеленгах, переданных в РЛС от n≥2 пеленгаторов, осуществляющих независимое сопровождение пеленгов целей, устраняют точки пересечения пеленгов, соответствующие ложным целям, на основании переданных данных о пеленгах реальных целей формируют графики изменения пеленга из точек расположения пеленгаторов, путем экстраполяции определяют значения пеленгов для различных моментов времени, на их основе вычисляют дальности до цели, ведут сопровождение в пассивном режиме по пеленгам и дальности траектории, эпизодически уточняя ее положение в активном режиме.
2. Способ по п. 1, отличающийся тем, что уточняют положение траектории при изменении параметров излучения цели или при перерыве в излучении.
| Справочник по радиолокации | |||
| Под ред | |||
| СКОЛНИКА М., Москва, Советское радио, 1978, т.4, с.194, 2-й абзац снизу | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2217773C2 |
| Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа | 2016 |
|
RU2617830C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА ПО ИЗМЕРЕНИЯМ УГЛОВЫХ КООРДИНАТ | 2016 |
|
RU2608583C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1998 |
|
RU2137152C1 |
| US 20130002472 A1, 03.01.2013 | |||
| WO 2005045459 A3, 07.07.2005 | |||
| JP 2010204054 A, 16.09.2010. | |||

