Изобретение относится к авиационной промышленности, а именно к многовинтовым летательным аппаратам.
Известен летательный аппарат, выполненный с возможностью вертикального взлета и посадки (Патент на изобретение №2674224, (RU), МПК В64С 27/08, В64С 29/00, опубл. 05.12.2018 г.) имеющий несущею конструкцию, по меньшей мере четыре несущих винта, каждый из которых закреплен на несущей конструкции и имеет по меньшей мере один воздушный винт.
Данный летательный аппарат не имеет возможности изменения шага несущих винтов, что не дает ему достаточной маневренности. Наличие всего четырех несущих винтов, управляемых скоростью вращения, сильно усложняет конструкцию, заставляет применять дополнительные фрикционные пары или электродвигатели, что сильно утяжеляет конструкцию и делает управление слишком сложным, а надежность аппарата в полете - низкой.
Наиболее близким аналогом является многовинтовой вертолет содержащий фюзеляж, фермы, шасси, силовую установку, трансмиссию, рулевое управление, четыре несущих винта с изменяемым шагом (Патент на изобретение №2500577, (RU) МПК В64С 27/08, опубл. 10.12.2013 г.).
Данный летательный аппарат имеет громоздкую конструкцию, большую массу, имеет множество редукторов и дифференциалов, снижающих мощность двигателя, его экономичность и надежность конструкции. Наличие двух винтов на одной оси, вращающихся в противоположные стороны, требует установки дополнительной системы смазки, что приведет к еще большему увеличению массы. Отсутствие возможности прямого управления углом атаки каждого винта и наличию автоматов перекоса на каждом винте, приводит к очень медленной реакции на движения рычагами управления и очень низкой маневренности из-за центра масс, расположенного в плоскости несущих винтов.
Задача изобретения: упрощение конструкции, возможность пилотирования без длительного обучения, повышение маневренности, повышение скорости реакции на движения органами управления, устойчивость при порывах ветра, повышение экономичности, увеличение скорости и дальности полета, снижение стоимости производства, простота обслуживания и ремонта, безопасность полета и возможность экстренной посадки при выходе из строя двигателя.
Поставленная задача достигается тем, что в многоосном летательном аппарате с вертикальным взлетом и посадкой состоящем из силовой установки, трансмиссии и несущих винтов, на раме установлены по меньшей мере шесть несущих винтов с лопастями, причем каждый имеет механизм изменения углов атаки, силовая установка представляет собой силовой агрегат с угловым редуктором, на выходном валу которого установлена шестерня, которая вращает вторую шестерню, связанную с вторичным валом для изменения направления вращения вторичного вала, на выходном валу редуктора и на вторичном валу установлены приводные шкивы для привода несущих винтов, которые вращаются в противоположные стороны, кроме того, на раме установлены органы управления, а именно педаль управления сцеплением, педаль управления дросселем, рычаги управления механизмами изменения углов атаки лопастей на несущих винтах, причем они расположены справа и слева от кресла, также несущие винты расположены вокруг кресла пилота, образуют левую тройку винтов и правую тройку винтов, левый рычаг управления механизмами изменения углов атаки лопастей предназначен для управления левой тройки винтов, а правый рычаг для правой тройки винтов, соответственно.
Поставленная задача также достигается тем, что рама выполнена легкой, например, из тонкостенных алюминиевых труб, сваренных между собой.
Поставленная задача также достигается тем, что многоосный летательный аппарат может быть дооснащен еще двумя или четырьмя несущими винтами, установленными по той же схеме и управляемыми аналогично.
Поставленная задача также достигается тем, что многоосный летательный аппарат может быть дооснащен одним или двумя винтами, вектор тяги которых направлен параллельно земле, для увеличения скорости полета.
Поставленная задача достигается тем, что в способе управления многоосного летательного аппарата с вертикальным взлетом и посадкой, аппарат управляется четырьмя органами управления, мощность и крутящий момент от силового агрегата передается на единственный угловой редуктор, который в свою очередь передает движение на валы по меньшей мере шести несущих винтов по средствам зубчатых ремней и зубчатых шкивов, каждый несущий винт снабжен механизмом изменения угла атаки лопастей, механизмы изменения углов атаки лопастей приводятся в действие тросами, соединенными с рычагами управления, при этом аппаратом управляют изменением тяги на каждом из винтов по отдельности, а вектор тяги создаваемый винтами направлен перпендикулярно земле.
Поставленная задача достигается тем, что приведение в движение несущих винтов и механизмов изменения тяги на несущих винтах производят четырьмя органами управления, а именно одним рычагом управления механизмами изменения угла атаки лопастей несущих винтов с левой стороны, одним рычагом управления механизмами изменения угла атаки лопастей несущих винтов с правой стороны, одной педалью управления дросселем, одной педалью управления сцеплением силового агрегата и трансмиссии.
Поставленная задача достигается тем, что угол атаки лопастей всех несущих винтов регулируют в широком диапазоне, что создает как положительную, так и отрицательную тягу при положительном и отрицательном угле атаки лопастей, за счет чего используют набегающий поток воздуха, при выходе из строя двигателя, для раскрутки маховика, расположенного после двигателя перед угловым редуктором, при отсутствии работы двигателя вследствие отключения сцепления педалью управления сцеплением, и накопления кинетической энергии, для подрыва положительной тягой и мягкой посадки за счет авторотации.
Летательный аппарат имеет единственный силовой агрегат, крутящий момент от которого передается на единственный угловой редуктор и далее напрямую к осям вращения несущих винтов посредствам зубчатых ремней, потеря мощности на которых меньше, чем при использовании зубчатых редукторов и при этом сильно сокращает массу. Центр масс расположен намного ниже плоскости расположения несущих винтов, которые создают тягу. Аппарат имеет шесть, или более несущих винтов, расположенных вокруг центра массы. Лопасти каждого винта имеют механизмы изменения угла атаки и управляются по отдельности, что позволяет регулировать тягу каждого винта.
Предлагаемое изобретение иллюстрируется следующими графическими изображениями:
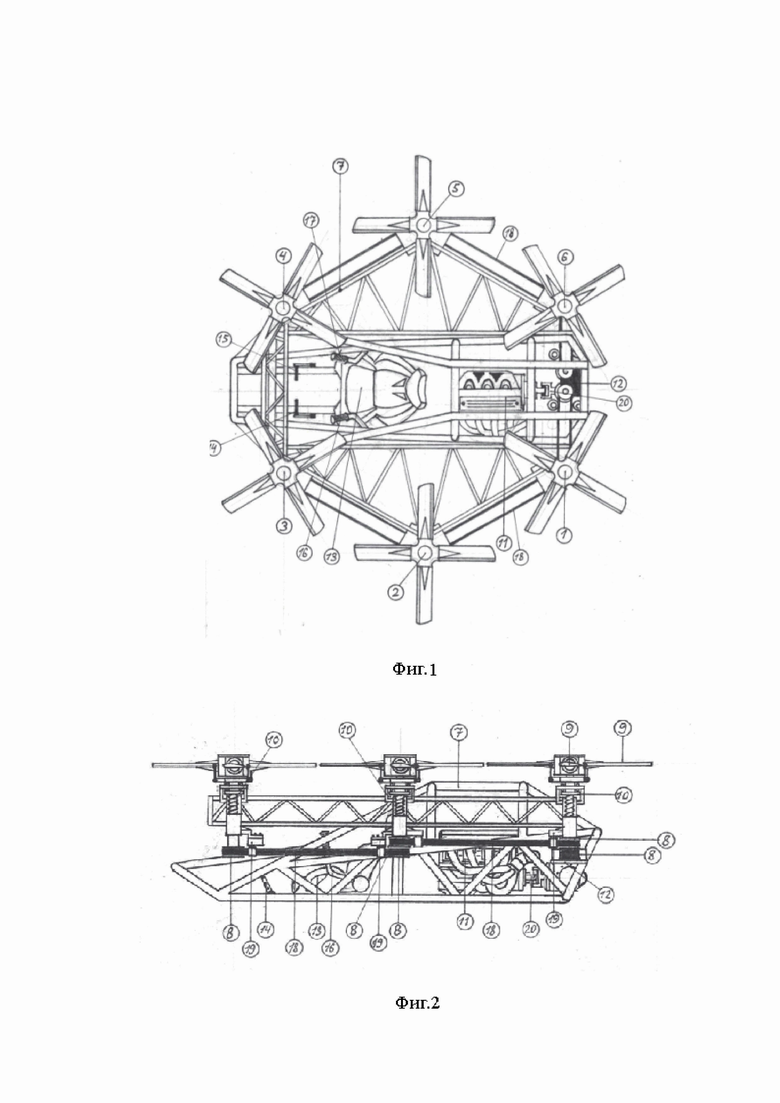
Фиг 1 - Многоосный летательный аппарат - вид сверху.
Фиг 2 - Многоосный летательный аппарат - вид сбоку (слева).
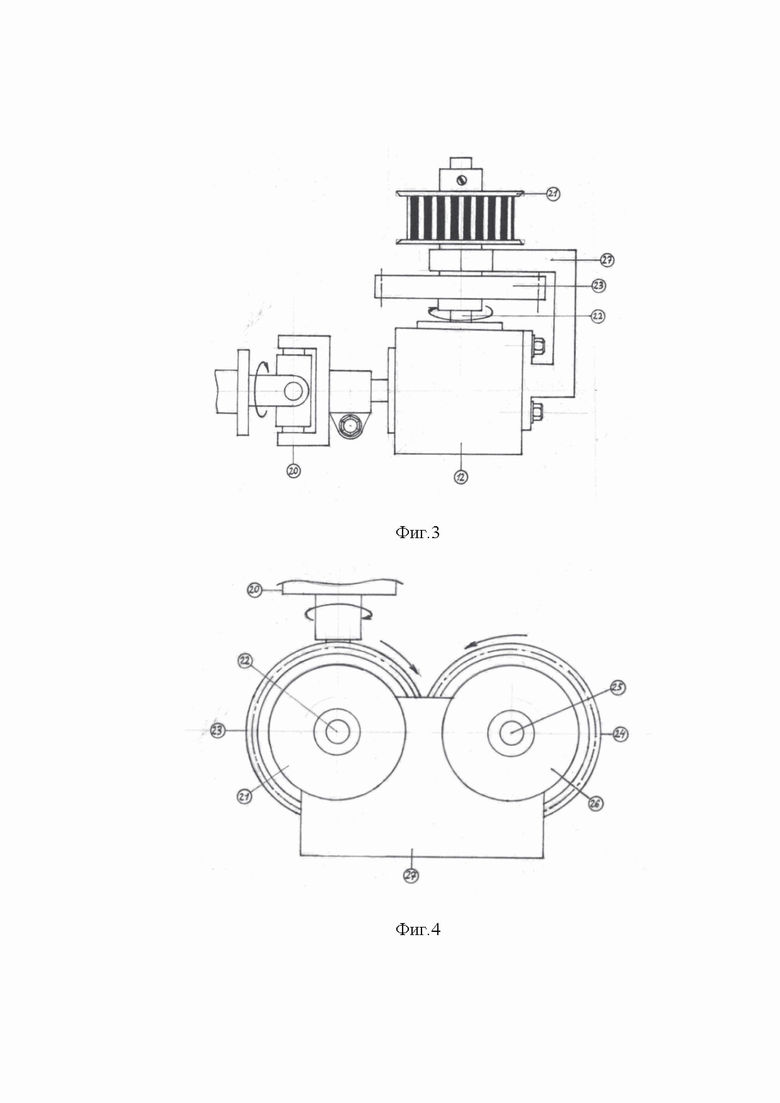
Фиг 3 - Угловой редуктор с паразитной шестерней - вид сбоку (слева).
Фиг 4 - Угловой редуктор с паразитной шестерней - вид сверху.
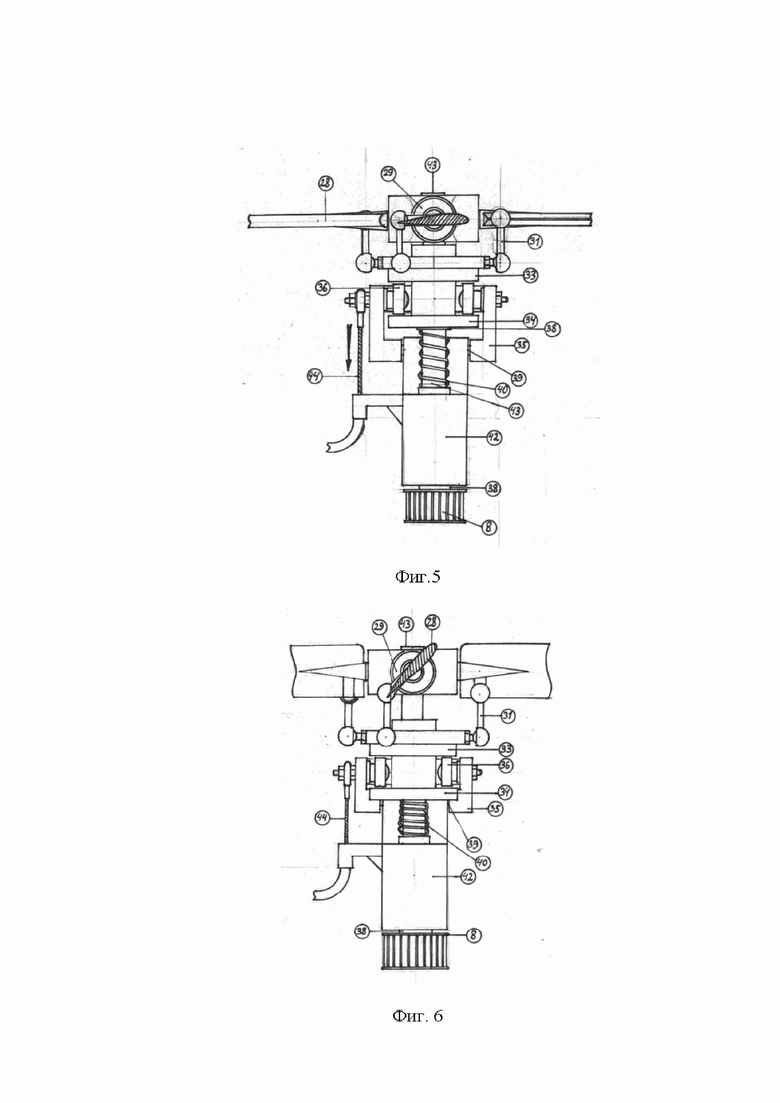
Фиг 5 - Несущий винт в сборе с механизмом изменения угла атаки лопастей в спокойном состоянии с указанием направления движения троса привода.
Фиг 6 - Несущий винт в сборе с механизмом изменения угла атаки лопастей в действии, в состоянии максимального угла атаки лопастей.
Фиг 7 - Устройство несущего винта. Несущий винт в разрезе.
Фиг 8 - Несущий винт в сборе с механизмом изменения угла атаки лопастей с указанием направления движения вилки, приводимой в движение тросом управления. Вид сбоку. Сечение А-А ступицы винта.
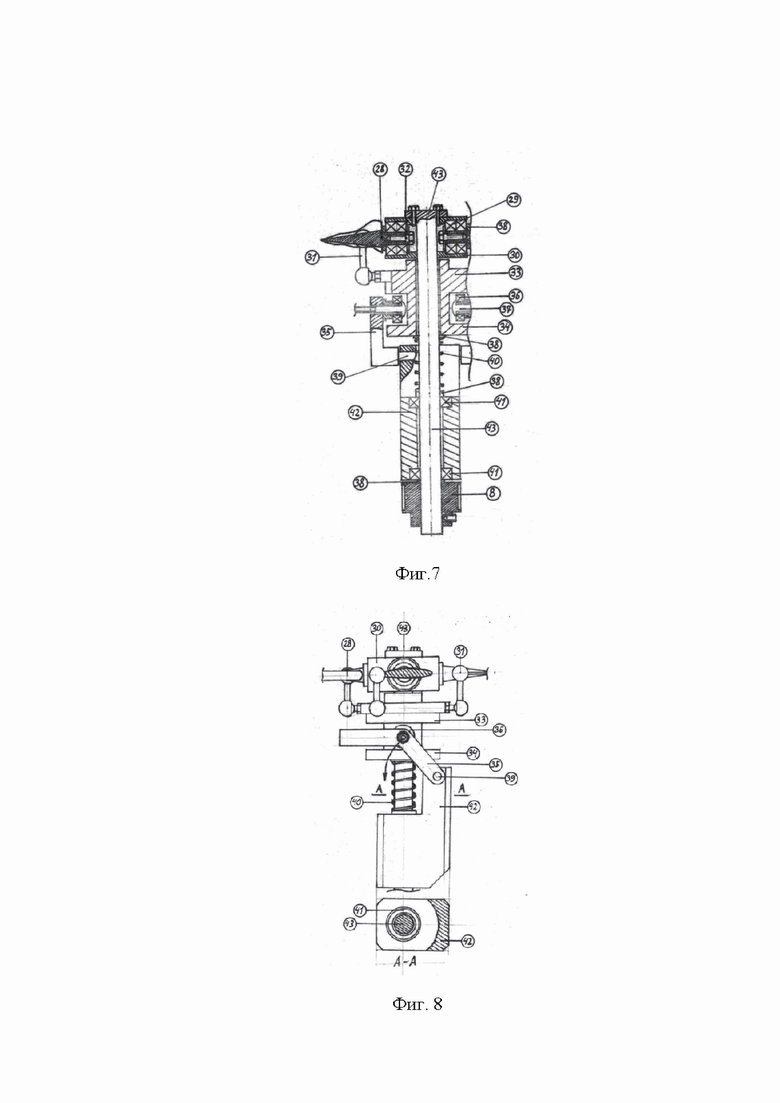
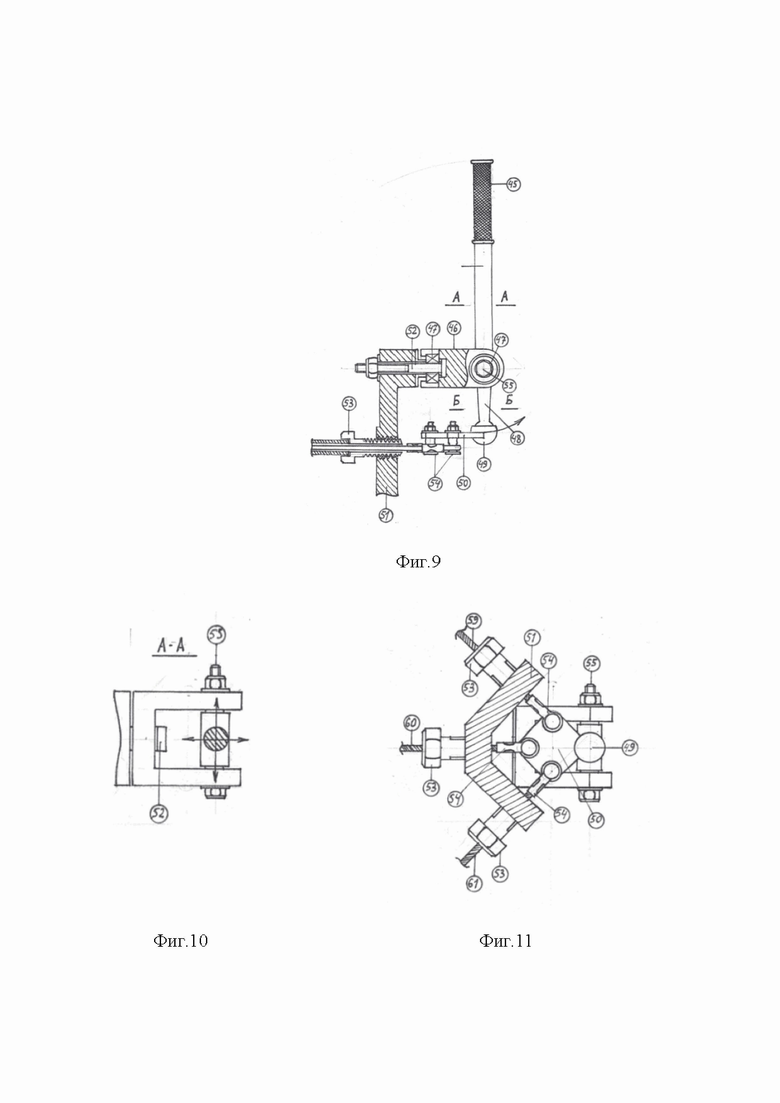
Фиг 9 - Устройство правого рычага управления изменением угла атаки лопастей на правой тройке винтов 4, 5 и 6.
Фиг 10 - Сечение А-А правого рычага управления. Устройство П-образного кронштейна.
Фиг 11 - Правый рычаг управления. Вид снизу. Траверса с подвижным креплением наконечников тросов управления и тросы управления винтами 4, 5 и 6.
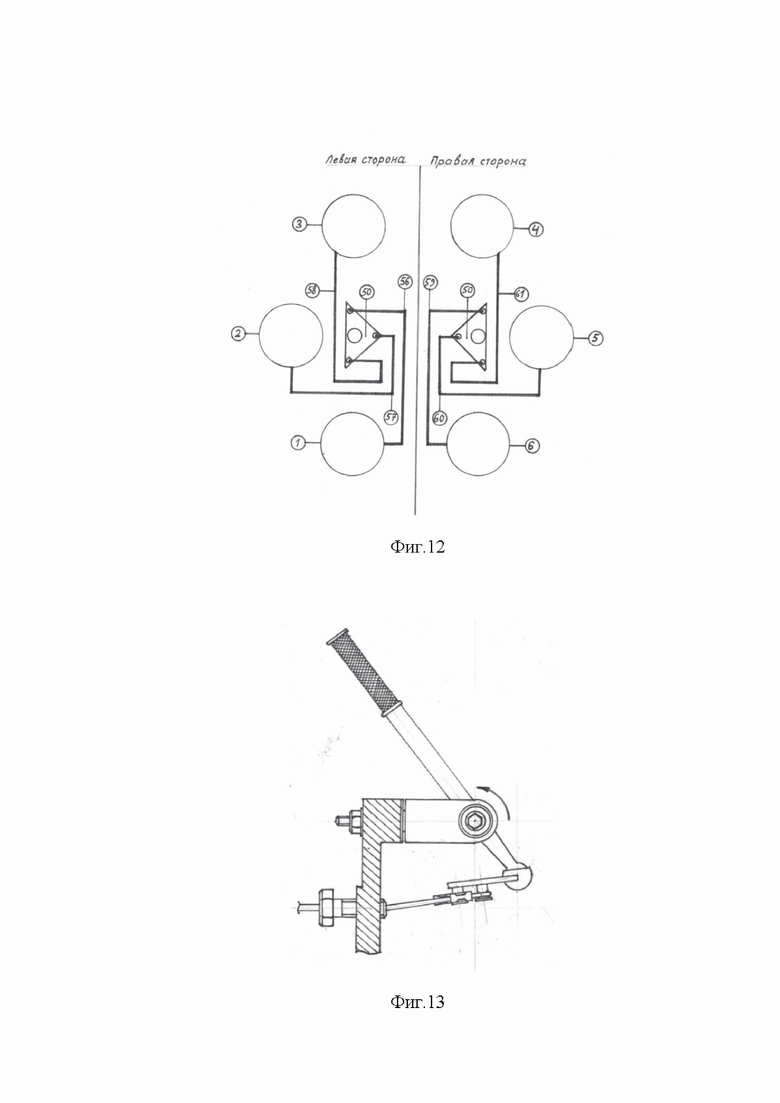
Фиг 12 - Схема соединения тросов привода с траверсами рычагов и механизмами изменения угла атаки лопастей на винтах.
Фиг 13 - Правый рычаг управления винтами 4, 5 и 6 сдвинутый влево (к центру конструкции или в сторону винта 2).
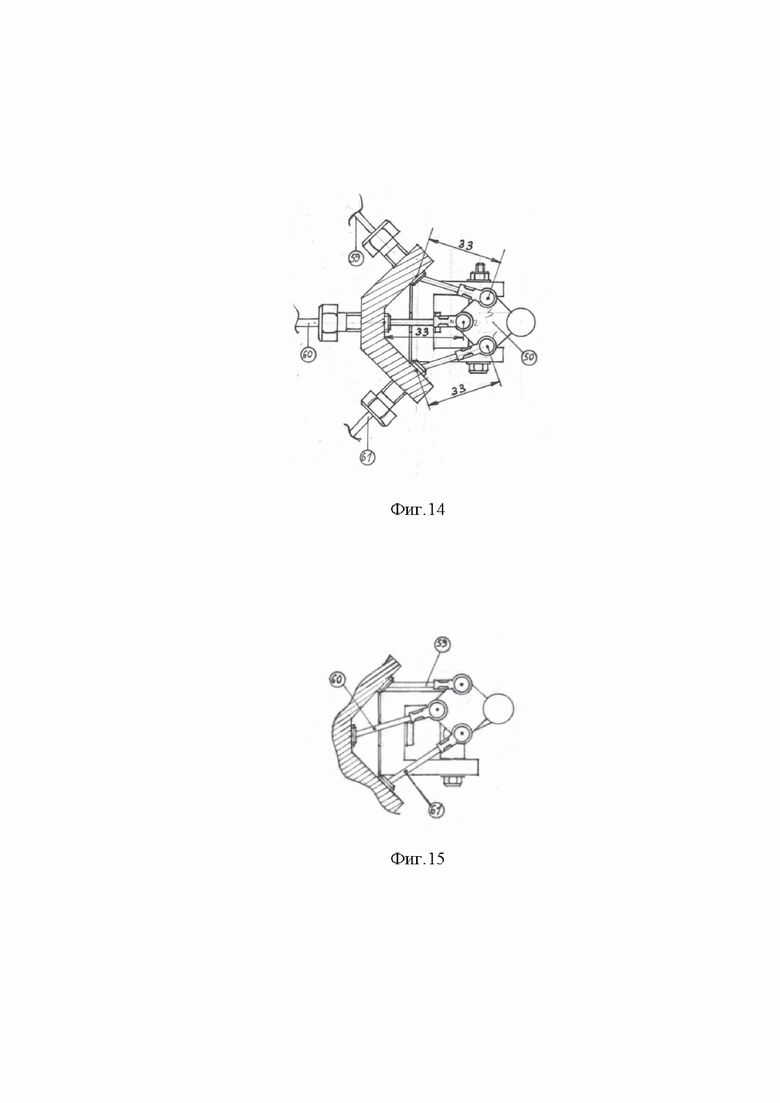
Фиг 14 - Правый рычаг управления винтами 4, 5 и 6 сдвинутый влево (к центру конструкции или в сторону винта 2). Вид снизу на траверсу и тросы привода механизмов изменения угла атаки лопастей.
Фиг 15 - Правый рычаг управления винтами 4, 5 и 6 сдвинутый влево и вперед (в сторону винта 2 и винта 3). Вид снизу на траверсу и тросы привода механизмов изменения угла атаки лопастей.
Многоосный летательный аппарат с вертикальным взлетом и посадкой состоит из рамы 7, на которой установлены несущие винты: задний левый 1, левый 2, передний левый 3, передний правый 4, правый 5 и задний правый 6, зубчатых шкивов 8, лопастей 9, механизмов изменения угла атаки лопастей 10, силового агрегата 11, углового редуктора с паразитной шестерней изменения направления вращения вала 12, кресла пилота 13, органов управления, таких как: педаль управления сцеплением 14, педаль управления дросселем 15, рычаг управления 16 механизмами изменения углов атаки лопастей на винтах 1, 2 и 3, расположенного слева от кресла пилота, рычага управления 17 механизмами изменения углов атаки лопастей на винтах 4, 5 и 6, расположенного справа от кресла пилота, зубчатых ремней 18, бугелей с натяжными роликами 19, упругой муфты привода 20.
Каждый несущий винт 1, 2, 3, 4, 5, 6 имеет механизм изменения угла атаки лопастей 10.
Механизм изменения угла атаки 10 состоит из: лопастей с поводками 28, подшипников втулок 29, втулки 30, тяг с шарнирами 31, фиксирующих болтов лопастей 32, стакана 33, тарелки 34, вилки 35, подшипников вилки 36, болтов крепления подшипников вилки 37, упорных шайб 38, оси вилки 39, возвратной пружины 40, подшипников вала 41, ступицы 42, зубчатого шкива 8, оси винта 43.
Приведение в движение несущих винтов (1, 2, 3, 4, 5, 6) осуществляется следующим образом: Крутящий момент от силового агрегата 11 через упругую муфту 20 передается на угловой редуктор 12. С помощью силового кронштейна с подшипниками 27 на угловом редукторе 12 установлены шестерня 24 с валом 25 и шкивом 26. Угловой редуктор 12 меняет плоскость вращения выходного вала двигателя и делает ее параллельной земле. Далее крутящий момент передается на зубчатый приводной шкив 21 для привода винтов 1, 2 и 3. На выходном вале редуктора 22 установлена шестерня 23, которая приводит в движение аналогичную шестерню 24, на которой установлен вал 25 с приводным зубчатым шкивом 26 винтов 4, 5 и 6, который вращается в противоположную сторону относительно шкива 1, 2 и 3. Далее вращение с помощью зубчатых ремней передается на шкивы, расположенные на валах несущих винтов 1, 2, 3, 4, 5 и 6.
Принцип действия механизма изменения угла атаки лопастей 10.
Ступица 42 жестко закреплена на раме 7, в ступице установлены подшипники 41, в которых вращается ось винта 43, которая является валом, приводимым в движение зубчатым шкивом 8 посредствам зубчатого ремня 18. Ступица имеет выступ, в который установлена ось вилки управления 39. На валу 43 установлена подшипниковая втулка 30, которая вращается вместе с валом. Во втулке установлены подшипники лопастей 29, в которых установлены сами лопасти 28, имеющие поводки, на которых установлены тяги 31. Подшипники 29 позволяют лопастям 28 вращаться в плоскости перпендикулярной плоскости вращения вала 43. Поводки лопастей 28 через шарниры соединены тягами со стаканом 33, который имеет тарелку 34 для упора подшипников вилки управления 36. При вытягивании троса 44, который соединен с вилкой управления 35 одним концом, а другим концом с рычагом управления 16 или 17, подшипники вилки управления 36 давят на тарелку 34, которая опускает стакан 33, который тянет вниз поводки лопастей 28 с помощью тяг 31. При опускании поводка лопасти 28 вниз, лопасть 28 совершает поворот в плоскости, перпендикулярной плоскости вращения приводного вала 43, что и приводит к изменению угла атаки лопасти, а именно его увеличению.
Управление изменением угла атаки лопастей несущих винтов.
Управление изменением угла атаки лопастей на винтах 1, 2 и 3 осуществляется с помощью рычага 16. Рычаг управления 16 механизмами изменения угла атаки лопастей на винтах 1, 2 и 3 аналогичен рычагу 17 управления механизмами изменения угла атаки лопастей на винтах 4, 5 и 6 и состоит из: рукоятки 45, п-образного кронштейна 46, подшипников 47, плеча 48, шарнира 49, траверсы 50, рамы 51, болта крепления п-образного кронштейна 52, регулировочных болтов тросов привода 53, подвижных соединений наконечников тросов управления 54, болта крепления рычага к п-образному кронштейну 55.
Принцип действия рычага 17 управления механизмами изменения угла атаки лопастей на винтах 4, 5 и 6 аналогичен принципу рычага 16, но так как на изображениях представлены виды именно рычага 17, то принцип действия мы рассмотрим на его примере: Рычаг установлен на П-образный кронштейн 46 через подшипники 47. П-образный кронштейн установлен на раме через подшипник 47. Благодаря этому рычаг 17 или 16 может двигаться влево - вправо и вперед - назад. На плече рычага 48 на шарнире 49 установлена траверса 50, на которой подвижно закреплены наконечники тросов привода 54 механизмов изменения углов атаки лопастей на винтах 4, 5 и 6. При движении рычагом 17 или 16 за рукоять 45, плечо рычага 17 перемещает траверсу 54, которая, в свою очередь натягивает или ослабляет тросы привода механизмов изменения углов атаки лопастей. При сдвиге рычага 17 влево (к центру конструкции или в сторону винта 2) все тросы равномерно натягиваются, приводя в движение вилки 35 механизмов изменения углов атаки, равномерно увеличивая угол атаки лопастей на винтах 4, 5 и 6. Далее, при сдвиге этого рычага 17 вперед (в сторону винта 4), трос 59 привода механизма на винте 6 натягивается еще сильнее, трос 60 механизма 5 натягивается незначительно, а трос 61 механизма 4 ослабляется. Таким образом, тяга на винте 6 увеличивается, на винте 5 увеличивается незначительно, а на винте 4 уменьшается. То же самое происходит, если рычаг 17 сдвинуть назад (в сторону винта 6), только тогда трос 61 привода механизма 4 натянется максимально, трос 60 натягивается незначительно, а трос 59 ослабляется.
Способ управления многоосным летательным аппаратом иллюстрируется следующими примерами:
Так как винты 1, 2 и 3 вращаются по часовой стрелке, а винты 4, 5 и 6 против часовой стрелки, реактивный крутящий момент компенсируется.
1. Взлет. После пуска двигателя отпускаем педаль управления сцеплением 14, увеличиваем обороты двигателя до средних номинальных с помощью педали управления дросселем 15, после этого все шесть несущих винтов 1, 2, 3, 4, 5 и 6 раскручиваются до номинальной частоты вращения (около 3000 об/мин). Сводим рычаги управления механизмами изменения углов атаки лопастей 16 и 17 к центру. При этом углы атаки всех лопастей на несущих винтах увеличиваются равномерно, создавая тягу вокруг центра масс, вектор которой перпендикулярен земле. При достижении достаточной тяги аппарат отрывается от земли и набирает высоту. Далее, с помощью рычагов 16 и 17 аппарат можно стабилизировать и управлять тангажом для движения вперед и назад, креном и рысканьем для поворотов и компенсации бокового ветра.
2. Движение вперед. Набрав высоту, оба рычага 16 и 17 смещаем вперед (относительно кресла пилота в сторону винтов 3 и 4). Таким образом угол атаки на лопастях винтов 1 и 6 увеличивается, на лопастях винтов 2 и 5 увеличивается не существенно, а на лопастях винтов 3 и 4 уменьшается. Из-за этого в задней части аппарата в районе винтов 1 и 6 тяга максимальна, что приводит к уменьшению угла тангажа и заставляет аппарат двигаться вперед.
3. Движение назад. Оба рычага 16 и 17 смещаем назад (относительно кресла пилота в сторону винтов 1 и 6). Таким образом угол атаки на лопастях винтов 3 и 4 увеличивается, на лопастях винтов 2 и 5 увеличивается не существенно, а на лопастях винтов 1 и 6 уменьшается. Из-за этого в передней части аппарата в районе винтов 3 и 4 тяга максимальна, что приводит к увеличению угла тангажа и заставляет аппарат двигаться назад.
4. Вращение влево. Для вращения влево требуется увеличить тягу заднего правого винта 6 или уменьшить тягу переднего левого винта 3. Для этого требуется сдвинуть правый рычаг 17 вперед, что увеличит угол атаки лопастей, соответственно и тягу на винте 6, по отношению ко всем остальным винтам или левый рычаг 16 сдвинуть назад, что приведет к уменьшению тяги на винте 3.
5. Вращение вправо. Вращение вправо выполняется аналогично вращению влево, но в обратном порядке. Требуется сдвинуть левый рычаг 16 вперед или правый 17 рычаг назад.
6. Крен влево. Для наклона аппарата влево необходимо увеличить тягу на правой тройке винтов 4, 5 и 6, тем самым увеличить угол крена. Для этого требуется потянуть правый рычаг 17 влево (к центру конструкции или в сторону винта 2)
7. Крен вправо. Выполняется аналогично крену влево, но в обратном порядке. Требуется сдвинуть левый 16 вправо (к центру или в сторону винта 5), таким образом тяга на винтах 1, 2 и 3 увеличивается и аппарат наклоняется вправо, уменьшая укол крена в отрицательною сторону.
8. Посадка. Посадка с любой высоты, превышающей минимальную, производится последовательно. Аппарат должен быть стабилизирован по углам танагажа, рысканья и крена с помощью рычагов управления углом атаки лопастей 16 и 17. При посадке с высоты превышающей 5 метров, требуется плавно разводить рычаги друг от друга, компенсируя порывы ветра движениями рычагов. При достижении минимальной высоты полета, около 5 метров, необходимо плавно снизить обороты двигателя для мягкой посадки с помощью педали управления дросселем 15. Необходимо, не меняя положения рычагов управления 16 и 17 или плавно двигать ими для стабилизации аппарата, плавно возвращать педаль управления дросселя 15, которая имеет дискретную фиксацию положения, в исходное положение.
Рама 7 может состоять из тонкостенных алюминиевых труб сваренных между собой. Так же рама 7 может быть собрана из карбоновых труб, скрепленных между собой угле волоконным шнуром и эпоксидной смолой. Далее такая рама запекается в печи при высокой температуре. Для достижения максимальной прочности, рама 7 представляет собой фермы, соединенные между собой.
При наступлении аварийной ситуации, например выходе из строя двигателя, аппарат может совершить мягкую посадку за счет авторотации несущих винтов. При выходе из строя двигателя, пилот должен отключить сцепление между двигателем и трансмиссией с помощью педали 14. При этом аппарат начнет стремительно терять высоту. Пилоту необходимо полностью развести рычаги управления 16 и 17 друг от друга. При этом угол атаки лопастей на несущих винтах уменьшится до отрицательных значений, что позволит набегающему потоку воздуха раскручивать их до скоростей близких к номинальным. Пилоту необходимо постоянно поддерживать горизонтальное снижение с помощью рычагов управления 16 и 17. В процессе снижения необходимо периодически сводить рычаги 16 и 17 друг к другу увеличения тяги на винтах и уменьшения скорости снижения. При приближении к земле (высота около 15м) пилот должен свести рычаги 16 и 17 друг к другу для достижения максимальной тяги на несущих винтах, торможения и мягкой посадки.
Угол атаки лопастей всех несущих винтов регулируется в широком диапазоне, что создает как положительную, так и отрицательную тягу при положительном и отрицательном угле атаки лопастей, за счет чего используют набегающий поток воздуха, при выходе из строя двигателя, для раскрутки маховика и накопления кинетической энергии, для подрыва положительной тягой и мягкой посадки за счет авторотации.
Конструкция имеет лишь небольшие потери мощности на единственном угловом редукторе и зубчатой паре, которые установлены для изменения плоскости вращения выходного вала двигателя и изменения направления вращения одного из главных зубчатых шкивов привода несущих винтов. Благодаря использованию легких материалов, достигается предельно низкая масса аппарата, что позволяет увеличить его грузоподъёмность и дальность полета.
Многоосный летательный аппарат с вертикальным взлетом и посадкой оснащен минимум шестью несущими винтами. Так как винты расположены вокруг цента масс, это позволяет эффективно управлять аппаратом по тангажу, крену и рысканью. Но, в модификационной версии аппарат может быть дополнен дополнительными винтами и иметь восемь несущих винтов, например, для двухместной версии аппарата. Увеличение количества несущих винтов также способствует увеличению максимальной тяги, а как следствие, увеличению грузоподъёмности. Кроме того, аппарат может быть дооснащен одним или двумя винтами, приводимых в движение напрямую выходным валом силового агрегата, создающих горизонтальную тягу. Это может потребоваться для увеличения горизонтальной скорости полета. Эти винты устанавливаются перпендикулярно горизонту и вектор их тяги параллелен горизонту. На этих винтах нет необходимости в регулировке по углу атаки лопастей, по этому их конструкция может быть упрощена.
Аппарат имеет всего 4 органа управления, что позволяет легко и быстро научиться пилотировать аппарат. Это делает аппарат стабильным в воздухе и позволяет комфортно маневрировать, противостоя ветрам, с помощью управления тягой каждого из шести винтов. Система управления многоосным летательным аппаратом позволяет управлять тангажом, рысканьем и креном, что делает его маневренным во всех плоскостях.
Изобретение относится к области авиации, в частности к конструкциям и способам управления многовинтовыми летательными аппаратами вертикального взлета и посадки. Летательный аппарат имеет единственный силовой агрегат, крутящий момент от которого передается на единственный угловой редуктор и далее напрямую к осям вращения несущих винтов посредством зубчатых ремней, потеря мощности на которых меньше, чем при использовании зубчатых редукторов, и при этом сильно сокращает массу. Центр масс летательного аппарата расположен ниже плоскости расположения несущих винтов, которые создают тягу. Аппарат имеет шесть или более несущих винтов, расположенных вокруг центра массы. Лопасти каждого винта имеют механизмы изменения угла атаки и управляются по отдельности, что позволяет регулировать тягу каждого винта. Обеспечивается повышение устойчивости, скорости и дальности полета, повышение безопасности полета и возможность посадки при выходе из строя двигателя. 2 н. и 5 з.п. ф-лы, 15 ил.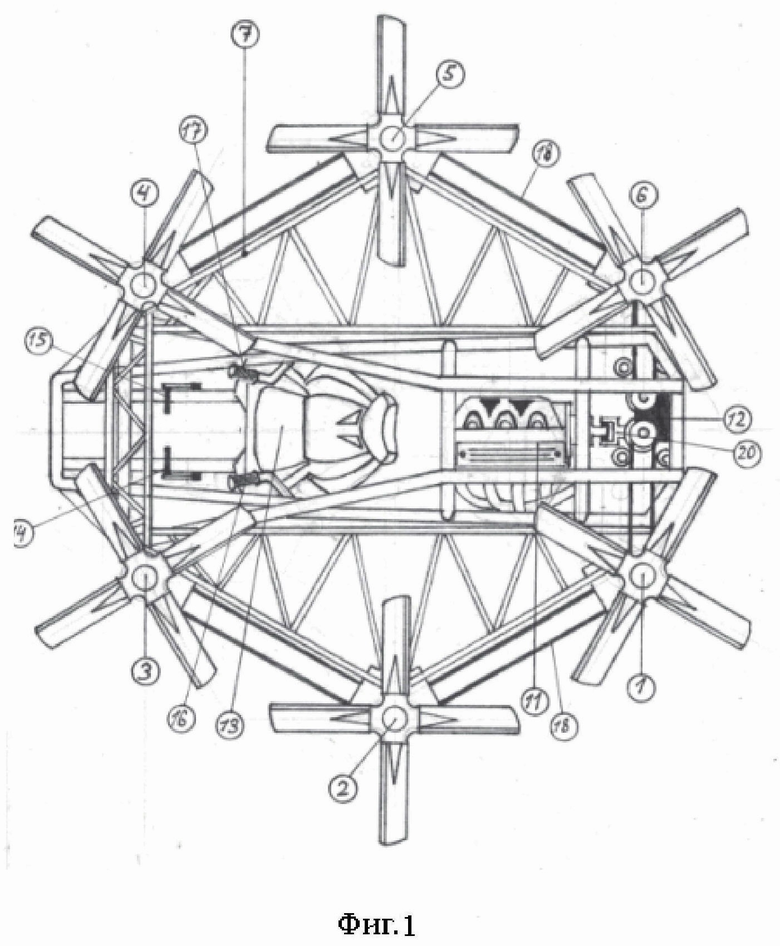
1. Многоосный летательный аппарат с вертикальным взлетом и посадкой, состоящий из силовой установки, трансмиссии и несущих винтов, отличающийся тем, что на раме установлены по меньшей мере шесть несущих винтов с лопастями, причем каждый имеет механизм изменения углов атаки, силовая установка представляет собой силовой агрегат с угловым редуктором, на выходном валу которого установлена шестерня, которая вращает вторую шестерню, связанную с вторичным валом, для изменения направления вращения вторичного вала, на выходном валу редуктора и на вторичном валу установлены приводные шкивы для привода несущих винтов, которые вращаются в противоположные стороны, кроме того на раме установлены органы управления, а именно педаль управления сцеплением, педаль управления дросселем, рычаги управления механизмами изменения углов атаки лопастей на несущих винтах, причем они расположены справа и слева от кресла, также несущие винты расположены вокруг кресла пилота, образуют левую тройку винтов и правую тройку винтов, левый рычаг управления механизмами изменения углов атаки лопастей предназначен для управления левой тройкой винтов, а правый рычаг для управления правой тройкой винтов соответственно.
2. Многоосный летательный аппарат с вертикальным взлетом и посадкой по п.1, отличающийся тем, что рама выполнена легкой, например из тонкостенных алюминиевых труб, сваренных между собой.
3. Многоосный летательный аппарат с вертикальным взлетом и посадкой по п.1, отличающийся тем, что может быть дооснащен еще двумя или четырьмя несущими винтами, установленными по той же схеме и управляемыми аналогично.
4. Многоосный летательный аппарат с вертикальным взлетом и посадкой по п.1, отличающийся тем, что может быть дооснащен одним или двумя винтами, вектор тяги которых направлен параллельно земле, для увеличения скорости полета.
5. Способ управления многоосным летательным аппаратом с вертикальным взлетом и посадкой, отличающийся тем, что аппарат управляется четырьмя органами управления, мощность и крутящий момент от силового агрегата передается на единственный угловой редуктор, который в свою очередь передает движение на валы по меньшей мере шести несущих винтов посредством зубчатых ремней и зубчатых шкивов, каждый несущий винт снабжен механизмом изменения угла атаки лопастей, механизмы изменения углов атаки лопастей приводятся в действие тросами, соединенными с рычагами управления, при этом аппаратом управляют изменением тяги на каждом из винтов по отдельности, а вектор тяги, создаваемый винтами, направлен перпендикулярно земле.
6. Способ управления многоосным летательным аппаратом с вертикальным взлетом и посадкой по п. 5, отличающийся тем, что приведение в движение несущих винтов и механизмов изменения тяги на несущих винтах производят четырьмя органами управления, а именно одним рычагом управления механизмами изменения угла атаки лопастей несущих винтов с левой стороны, одним рычагом управления механизмами изменения угла атаки лопастей несущих винтов с правой стороны, одной педалью управления дросселем, одной педалью управления сцеплением силового агрегата и трансмиссии.
7. Способ управления многоосным летательным аппаратом с вертикальным взлетом и посадкой по п. 5, отличающийся тем, что угол атаки лопастей всех несущих винтов регулируют в широком диапазоне, что создает как положительную, так и отрицательную тягу при положительном и отрицательном угле атаки лопастей, за счет чего используют набегающий поток воздуха при выходе из строя двигателя для раскрутки маховика, расположенного после двигателя перед угловым редуктором, при отсутствии работы двигателя вследствие отключения сцепления педалью управления сцеплением и накопления кинетической энергии, для подрыва положительной тягой и мягкой посадки за счет авторотации.
| МНОГОВИНТОВОЙ ВЕРТОЛЕТ | 2012 |
|
RU2500577C1 |
| KR 1020170118383 A, 25.10.2017 | |||
| CN 203318679 U, 04.12.2013 | |||
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2011 |
|
RU2458822C1 |
| СИЛОВАЯ УСТАНОВКА С ИЗМЕНЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2013 |
|
RU2536421C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2018 |
|
RU2706130C2 |

