ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области техники контроля авиационного двигателя (двигателя летательного аппарата). В частности, изобретение относится к стандартизации данных, используемых для контроля авиационного двигателя.
В многочисленных различных отраслях промышленности, таких как авиационная или космическая отрасли промышленности, имеет основополагающую важность контролировать поведение двигателя, для того чтобы улучшать эффективность его проектирования и эксплуатации. Это зависит от способности получать и обрабатывать данные, которые измеряются датчиками контроля.
Одной из проблем, встречаемой экспертами по двигателям при интерпретации или анализе измерений, является то обстоятельство, что данный двигатель никогда не работает при в точности одинаковых условиях. Для двигателя летательного аппарата, выполняющего рабочие полеты, условия получения измерений всегда различны: они зависят от пилотирования, погоды, траектории полета, состояния двигателя и т.д.
Однако эффективный детектор отклонений от нормы должен быть способным к обнаружению дефекта независимо от контекста. Тем не менее, очень дорого эксплуатировать приложения непрерывного контроля и, в дополнение, очень трудно выполнять специальные расчеты для каждой стадии полета и для каждого внешнего условия.
Таким образом, инструмент контроля должен быть способен к работе идентичным образом независимо от внешних условий сбора данных. Поэтому, необходимо, до начала какого бы то ни было контроля приводить данные к нормальным условиям.
В настоящее время, способом нормализации данных является традиционный способ нормирования, который не более чем рассчитывает среднее значение каждого индикатора контроля в качестве определяемого из измерений, собранных с двигателя летательного аппарата, рассчитывает разность между упомянутым средним значением и измерением, которое было снято, а затем, делит разность на среднеквадратическое отклонение. Среднее значение и среднеквадратическое отклонение рассчитываются заранее для предварительно оцифрованной последовательности данных.
Недостаток такого способа состоит в том, что он не может обрабатывать зависимости от экзогенных данных и он не может обрабатывать соотношения зависимостей между самими индикаторами.
Существуют другие способы, которые состоят в создании многомерных нормализаций на основании алгоритмов сжатия, таких как факторный анализ причин (PCA). Тем не менее, они требуют большого количества времени вычисления и они ведут к безразмерным индикаторам, которые не показательны для экспертов по двигателям.
ЦЕЛЬ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение предлагает способ нормализации данных, используемых для контроля авиационного двигателя, способ содержит следующие этапы:
- сбор измерений временного ряда на протяжении времени касательно упомянутого авиационного двигателя;
- из упомянутых измерений временного ряда, расчет набора индикаторов  , которые характерны для элементов упомянутого двигателя;
, которые характерны для элементов упомянутого двигателя;
- из упомянутых измерений временного ряда, идентификацию набора  экзогенных данных, представляющего внешний контекст, действующий на упомянутый набор индикаторов Y;
экзогенных данных, представляющего внешний контекст, действующий на упомянутый набор индикаторов Y;
- определение традиционной многомерной модели, одновременно обрабатывающей индикаторы из упомянутого набора индикаторов Y, наряду с принятием во внимание упомянутого набора X экзогенных данных для формирования набора  оценок, соответствующего упомянутому набору
оценок, соответствующего упомянутому набору  индикаторов; и
индикаторов; и
- нормирование каждой оценки  в качестве функции опорного значения для соответствующего индикатора
в качестве функции опорного значения для соответствующего индикатора  и разности между каждой упомянутой оценкой
и разности между каждой упомянутой оценкой  и упомянутым соответствующим индикатором
и упомянутым соответствующим индикатором  для формирования набора нормализованных значений
для формирования набора нормализованных значений  .
.
Этот способ дает возможность нормализовать индикаторы устранением зависимостей относительно внешнего контекста наряду с обработкой стохастических соотношений взаимной зависимости между самими индикаторами. Таким образом, контроль авиационного двигателя может происходить идентичным образом, независимо от внешних условий сбора данных. Нормализованные значения могут рассматриваться в качестве наблюдений, которые были получены при строго идентичных условиях для каждого случая, в котором контролируется двигатель, или для каждого полета летательного аппарата.
В еще одном аспекте настоящего изобретения, определение упомянутой традиционной многомерной модели содержит следующие этапы:
- для каждого индикатора  из упомянутого набора индикаторов Y построение пространства
из упомянутого набора индикаторов Y построение пространства  проекций, сформированное аналитическими преобразованиями подмножества индикаторов
проекций, сформированное аналитическими преобразованиями подмножества индикаторов  , содержащего все из индикаторов из упомянутого набора индикаторов Y, за исключением каждого упомянутого индикатора
, содержащего все из индикаторов из упомянутого набора индикаторов Y, за исключением каждого упомянутого индикатора  , и упомянутым набором X экзогенных данных; и
, и упомянутым набором X экзогенных данных; и
- для каждого индикатора  из упомянутого набора индикаторов Y расчет соответствующей оценки
из упомянутого набора индикаторов Y расчет соответствующей оценки  проецированием упомянутого индикатора
проецированием упомянутого индикатора  с использованием метода регрессии в упомянутое пространство
с использованием метода регрессии в упомянутое пространство  проекций, тем самым, формируя набор оценок
проекций, тем самым, формируя набор оценок  .
.
Аналитические преобразования, естественно, могут включать в себя тождественное преобразование. Таким образом, пространство может быть образовано из подмножества индикаторов и из набора экзогенных данных, а также аналитическими приложениями, выполняемыми на упомянутых данных. Это дает возможность выдавать информацию о физике данных, которые нормализуются, и, по выбору, дает возможность вводить сведения, которые могут улучшать уместность модели. Более того, нормализованные значения являются не абстрактными величинами, но подлинными нормализованными отличительными признаками исходных индикаторов, имеющими такую же размерность, но освобожденные от отношений зависимости с контекстом сбора данных. Это дает возможность не только приводить контроль двигателя к нормальным условиям, но также содействовать интерпретации контроля экспертами.
Преимущественно, упомянутые измерения временного ряда собираются во время нормальной работы упомянутого авиационного двигателя.
Таким образом, очень легко получать измерения временного ряда, поскольку, в качестве общего правила, двигатель работает нормально. Более того, посредством использования исключительно данных нормальной работы, для целей калибровки, многомерная модель легко верифицируется в показателях устойчивости, при условии большей доступности таких измерений.
Каждое нормализованное значение  может рассчитываться прибавлением среднего или опорного значения для соответствующего индикатора
может рассчитываться прибавлением среднего или опорного значения для соответствующего индикатора  к разности между соответствующим индикатором
к разности между соответствующим индикатором  и соответствующей оценкой
и соответствующей оценкой  с использованием следующего уравнения:
с использованием следующего уравнения:  .
.
Таким образом, значения нормализации легки для расчета и продолжают иметь смысл, который ясен для экспертов, будучи не зависимыми от условий полета.
Преимущественно, способ включает в себя анализ устойчивости каждой оценки с использованием методики перекрестного оценивания, служащей для выбора оптимального пространства проекций.
Методика перекрестного оценивания очень легка для реализации вследствие большого количества данных нормальной работы.
Согласно признаку настоящего изобретения, упомянутое пространство проекций строится с использованием экспертных критериев с помощью физических формулировок соотношений между индикаторами, а также между индикаторами и экзогенными данными.
Таким образом, посредством идентификации способа, которым взаимосвязаны данные из физических сведений об измерениях, эксперт по двигателям продолжает во все моменты времени быть способным к интерпретации и взаимодействию с моделью.
Согласно еще одному признаку, упомянутое пространство строится автоматически посредством использования нейронной сети.
Таким образом, когда эксперт не имеет априорного знания о соотношениях между самими индикаторами и/или соотношениях между индикаторами и экзогенными данными, модель сама может отыскивать такие соотношения посредством анализа данных нормальной работы.
В частности, упомянутая нейронная сеть может быть моделью, имеющей узлы.
Преимущественно, индикаторы из упомянутого набора индикаторов  характерны для физических и/или логических элементов упомянутого двигателя.
характерны для физических и/или логических элементов упомянутого двигателя.
Таким образом, индикаторы могут указывать конкретный элемент или характерную задачу из полного набора элементов двигателя, таким образом, давая возможность лучше анализировать характеристику в режиме работы двигателя.
Индикаторы из упомянутого набора индикаторов  могут рассчитываться с использованием экспертных критериев посредством построения FMECA (анализа видов, следствий и критичности отказов).
могут рассчитываться с использованием экспертных критериев посредством построения FMECA (анализа видов, следствий и критичности отказов).
Это дает возможность использовать знание экспертов по двигателям для того, чтобы собирать индикаторы, которые полезны при анализе двигателя.
Индикаторы могут идентифицироваться посредством сравнения с эталоном конкретных точек или конкретных функций, обобщающих детали или формы некоторых кривых, представляющих упомянутые измерения временного ряда.
Преимущественно, экзогенные данные  , действующие на индикаторы, идентифицируются с использованием экспертных критериев посредством анализа зависимостей, дающего возможность перечисляться контекстным данным, ассоциативно связанным с индикаторами.
, действующие на индикаторы, идентифицируются с использованием экспертных критериев посредством анализа зависимостей, дающего возможность перечисляться контекстным данным, ассоциативно связанным с индикаторами.
Согласно признаку настоящего изобретения, упомянутая регрессия может быть линейной регрессией.
Изобретение также предлагает систему для нормализации данных, используемых для контроля авиационного двигателя, система содержит:
- средство для работы на протяжении времени, чтобы собирать измерения временного ряда с упомянутого авиационного двигателя;
- средство для расчета, из упомянутых измерений временного ряда, набора индикаторов  , характерных для элементов упомянутого двигателя;
, характерных для элементов упомянутого двигателя;
- средство для идентификации, из упомянутых измерений временного ряда, набора  экзогенных данных, представляющего внешний контекст, действующий на упомянутый набор индикаторов Y;
экзогенных данных, представляющего внешний контекст, действующий на упомянутый набор индикаторов Y;
- средство для определения традиционной многомерной модели, одновременно обрабатывающей индикаторы из упомянутого набора индикаторов Y, наряду с принятием во внимание упомянутого набора X экзогенных данных для формирования набора оценок  , соответствующих упомянутому набору индикаторов ; и
, соответствующих упомянутому набору индикаторов ; и
- средство для нормирования каждой оценки  в качестве функции опорного значения для соответствующего индикатора
в качестве функции опорного значения для соответствующего индикатора  и разности между каждой упомянутой оценкой и упомянутым соответствующим индикатором , с тем чтобы формировать набор нормализованных значений
и разности между каждой упомянутой оценкой и упомянутым соответствующим индикатором , с тем чтобы формировать набор нормализованных значений  .
.
Изобретение также предлагает компьютерную программу, включающую в себя команды для реализации способа нормализации, использующего вышеприведенные этапы, которые выполняются средством процессора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие признаки и преимущества устройства и способа изобретения лучше проявляются по прочтении последующего описания, приведенного в качестве неограничивающего указания со ссылкой на прилагаемые чертежи, на которых:
- фиг.1 показывает аппаратные средства, реализованные в системе или способе, которые могут использоваться для нормализации данных, используемых при контроле авиационного двигателя в соответствии с изобретением;
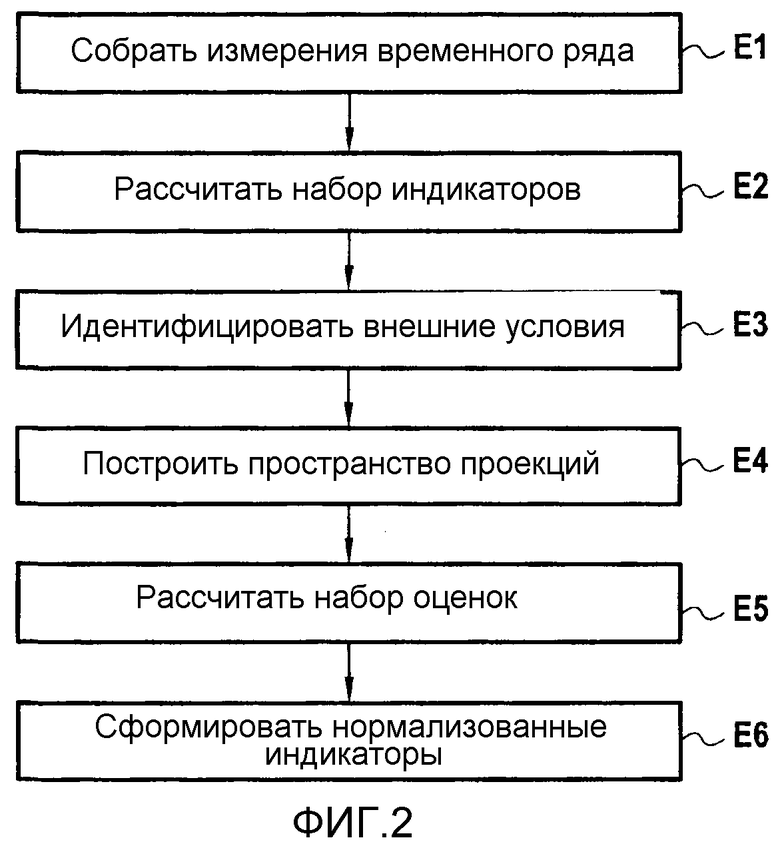
- фиг.2 - блок-схема последовательности операций способа, показывающая основные этапы для нормализации данных, используемых для контроля авиационного двигателя по фиг.1;
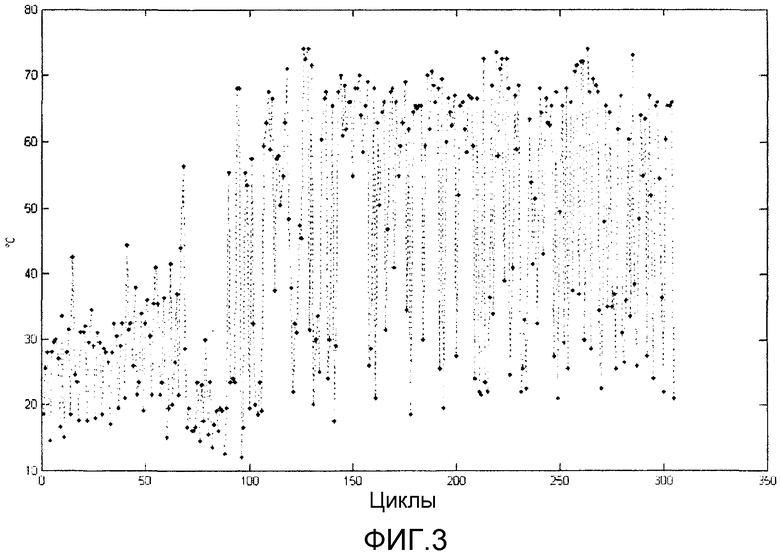
- фиг.3 - графическое представление, показывающее температуру масла непосредственно после запуска авиационного двигателя по фиг.1;
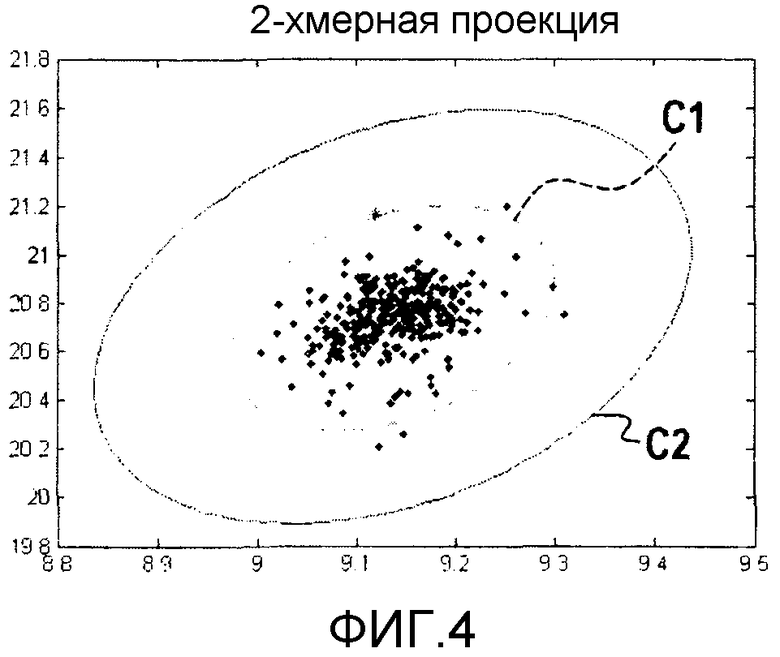
- фиг.4 - графическое представление, показывающее задержки этапа запуска авиационного двигателя по фиг.1;
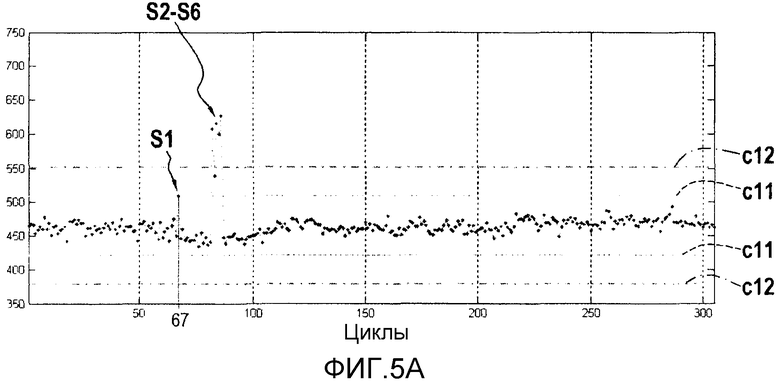
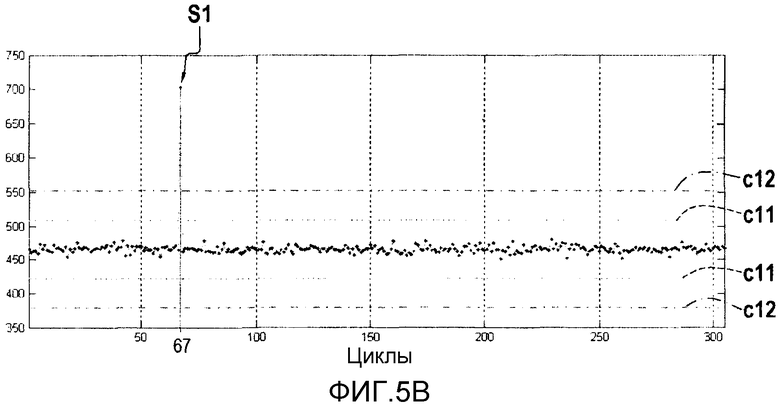
- фиг.5A и 5B - графические представления, показывающие время, требуемое для достижения максимального ускорения вала низкого давления после каждого случая, когда запускается авиационный двигатель по фиг.1;
- фиг.6A и 6B - графические представления, показывающие градиент температуры выхлопного газа, которая измеряется на авиационном двигателе по фиг.1.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг.1 показывает аппаратные средства, реализованные в системе или способе по изобретению для нормализации данных, используемых для контроля авиационного двигателя 1.
Система содержит множество датчиков 3a-3f для измерения данных, отражающих состояние двигателя 1, и внешних или внутренних контекстных данных, которые могли оказывать влияние на работу двигателя 1. Система также включает в себя средство 5 процессора данных, такое как вычислитель или компьютер, допускающий использование для выполнения компьютерной программы, предназначенной для реализации способа по изобретению. Средство 5 процессора содержит аппаратные средства, которые обычно должны обнаруживаться в компьютере. Более подробно, средство 5 процессора содержит центральный блок 7, который выполняет последовательности программных команд способа по изобретению, центральную память 9, которая хранит данные и программы, которые являются работающими, средство или носители 11 хранения цифровых данных для сохранения данных, периферийные устройства ввода (датчики 3a-3f, клавиатуру, мышь,...) и периферийные устройства вывода (экран 13, принтер 15,...) для восприятия результата нормализации.
В соответствии с изобретением, фиг.2 показывает основные этапы, реализованные средством 5 процессора, для того чтобы нормализовать данные, используемые для контроля авиационного двигателя.
Этап E1 относится к идентификации необработанных измерений, из которых априори можно извлечь полезную информацию об авиационном двигателе 1, который должен контролироваться. Средство 5 процессора сконфигурировано действовать на протяжении времени, чтобы собирать и оцифровывать измерения временного ряда, которые получены датчиками 3d-3f авиационного двигателя 1, в то время как в действии, вместе с контекстными измерениями, полученными датчиками 3a-3c, представляющими внешние условия окружающей среды.
В рабочем состоянии, количество датчиков 3a-3f не очень велико, но сборы данных выполняются с разными частотами, и элементы, которые могут прослеживаться из них, могут быть весьма многочисленными. Например, что касается двигателя CFM, от девяти до 12 датчиков могут быть установлены для измерения давления, расходов и температур на низкой частоте 32 герца (Гц), и четыре датчика могут быть установлены для измерения частот вращения валов двигателя 1 и вибраций двигателя 1 на высокой частоте, такая высокая частота может быть настолько же большой, как 20 килогерц (кГц) или выше.
Более того, должно быть отмечено, что измерения временного ряда могут очень легко собираться при нормальной работе авиационного двигателя 1 при условии большой доступности таких измерений.
Этап E2 относится к определению индикаторов. Таким образом, средство 5 процессора сконфигурировано для расчета, из измерений временного ряда, набора индикаторов  , которые характерны для элементов двигателя 1.
, которые характерны для элементов двигателя 1.
Должно быть отмечено, что индикаторы могут быть характерны для элементов, которые являются физическими, то есть, указывающими на конкретный элемент двигателя 1, или для элементов, которые являются логическими, то есть, указывающими на специфическую задачу полного набора элементов двигателя 1. Более точно, физический элемент является реальным компонентом двигателя 1, например, таким как двигатель высокого давления (HP) без вспомогательных агрегатов, клапаны статора, и т.д. Логический элемент или система указывает ссылкой на группу компонентов двигателя 1, выполняющую некоторую специфическую задачу, такую как систему стартера, систему смазки, коэффициент полезного действия, и т.д.
Более того, индикаторы  могут рассчитываться на основе экспертных критериев. Например, эксперты могут формулировать индикаторы в документе, известном как «анализ видов, последствий и критичности отказов» (FMECA). Такой документ перечисляет отказы, участвующие единицы оборудования, причины, следствия, а также индикаторы, рассчитанные из вышеприведенных измерений, дающие возможность идентифицироваться явлению, причем, каждый ассоциативно связан с описанием наблюдаемых эффектов. Более того, каждый дефект может быть описан эффектом, наблюдаемым при специфических результатах, рассчитанных из измерений временного ряда.
могут рассчитываться на основе экспертных критериев. Например, эксперты могут формулировать индикаторы в документе, известном как «анализ видов, последствий и критичности отказов» (FMECA). Такой документ перечисляет отказы, участвующие единицы оборудования, причины, следствия, а также индикаторы, рассчитанные из вышеприведенных измерений, дающие возможность идентифицироваться явлению, причем, каждый ассоциативно связан с описанием наблюдаемых эффектов. Более того, каждый дефект может быть описан эффектом, наблюдаемым при специфических результатах, рассчитанных из измерений временного ряда.
Индикаторы могут идентифицироваться «указателями», например, посредством идентификации конкретных точек или конкретных функций, которые обобщают детали или формы некоторых кривых, представляющих измерения временного ряда.
Например, для того чтобы анализировать пусковую мощность двигателя 1, эксперты извлекают различные длительности и специфические значения или выполняют расчеты, которые имеют смысл, который понятен в показателях запуска. В числе этих индикаторов, может быть определен индикатор задержки, указывающий время, требуемое валом HP двигателя, чтобы достичь заданной частоты вращения после того, как был открыт топливный клапан. Также может быть дано соображение в отношении индикатора о максимальном ускорении вала HP и в отношении многих других подобных индикаторов.
Для того чтобы анализировать коэффициент полезного действия, эксперты, например, сосредотачиваются на измерениях температуры, давления и расхода топлива. После этого они могут строить индикаторы износа, которые, в качестве примера, выражаются в показателях потребления топлива от одного полета к другому.
Для того чтобы проанализировать подшипник вала двигателя 1, специалисты по вибрациям осуществляют наблюдение по определенным частотам, чтобы обособлять ритмы вращения, которые зависят от размеров различных элементов вала: радиусов обойм, диаметров шариков, и т.д.
Этап E3 относится к идентификации внешних условий. Более точно, средство 5 процессора сконфигурировано для идентификации, из упомянутых измерений временного ряда, набора  данных, представляющего внешний контекст, действующий на набор индикаторов Y.
данных, представляющего внешний контекст, действующий на набор индикаторов Y.
Каждое измерение, собранное во время полета, берется при конкретных внешних или внутренних условиях. Эти условия, которые могут оказывать влияние на то, каким образом понимаются индикаторы, записываются сами по себе. Внешние условия могут содержать наружные температуры и давления, относительное положение в пространстве и относительную скорость самолета, а также, где происходит полет (над морем, пустыней, землей и т.д.), метеорологические условия (дождь, снег, обледенение и т.д.), влажность и т.д. Внутренние условия могут относиться к особым использованиям двигателя (частоте вращения вала, температуре выхлопного газа, типу топлива и т.д.). Все из этих измерений могут рассматриваться в качестве составляющих экзогенные данные.
В качестве примера экзогенных данных, фиг.3 является графическим представлением, показывающим температуру масла непосредственно перед запуском двигателя. Может быть немедленно видно, что есть два типа запусков, соответствующих холодным запускам и горячим запускам. Это типично применяется, когда внутреннее измерение (температура масла) рассматривается в качестве составляющего контекстные данные, которые обеспечивают четкое разграничение между двумя классами запуска, которым необходимо приниматься во внимание при анализе данных.
Преимущественно, экзогенные данные  , включенные в индикаторы, могут идентифицироваться на основе экспертных критериев. Более того, автоматический анализ зависимостей (посредством изучения корреляций или взаимной информации) также служит, чтобы быстро перечислять контекстные данные, ассоциативно связанные с индикаторами.
, включенные в индикаторы, могут идентифицироваться на основе экспертных критериев. Более того, автоматический анализ зависимостей (посредством изучения корреляций или взаимной информации) также служит, чтобы быстро перечислять контекстные данные, ассоциативно связанные с индикаторами.
Также должно быть отмечено, что, так как индикаторы могут зависеть от контекста, также возможно, чтобы соотношения существовали между самими индикаторами. Невозможно непосредственно устранять контекстную зависимость индикатора от индикатора, поскольку результат был бы должен разрушить всю из информации, содержащейся в индикаторах. Вообще, эксперты по двигателям осведомлены о содержимом информации в соотношениях взаимной зависимости, и они также осознают трудность, заключенную в построении индикаторов, которые независимы.
В качестве примера, фиг.4 - графическое представление задержки запуска двигателя 1 при использовании вспомогательной силовой установки (ВСУ, APU) в качестве функции длительности времени, необходимого, чтобы двигатель 1 достиг своей номинальной частоты вращения на земле. Кривая C1 пунктирной линии обозначает первый уровень дисперсии около среднего значения, а кривая C2 непрерывной линии обозначает второй уровень дисперсии около среднего значения.
Таким образом, распределение точек на фиг.4 ясно показывает, что существует соотношение между задержкой запуска двигателя 1 и временем, требуемым, чтобы он достиг своей номинальной частоты вращения на земле. Естественно, соотношение между такими двумя индикаторами может зависеть от экзогенных данных, таких как наружная температура или давление на выпуске из APU.
Этапы E4 и E5 относятся к построению оценок, которые ассоциативно связаны с индикаторами, рассчитанными на этапе E2.
Средство 5 процессора сконфигурировано для определения традиционной многомерной модели, которая одновременно обрабатывает индикаторы из набора индикаторов Y, наряду с принятием во внимание набора X экзогенных данных, для того чтобы формировать набор  оценок, соответствующий набору индикаторов
оценок, соответствующий набору индикаторов  .
.
Более точно, этап E4 состоит в построении пространства  проекций для каждого заданного индикатора
проекций для каждого заданного индикатора  из набора индикаторов Y.
Это пространство проекций образовано набором X экзогенных данных и аналитическими преобразованиями подмножества индикаторов
из набора индикаторов Y.
Это пространство проекций образовано набором X экзогенных данных и аналитическими преобразованиями подмножества индикаторов  , такое подмножество включает в себя все из индикаторов набора индикаторов Y, иные чем данный индикатор
, такое подмножество включает в себя все из индикаторов набора индикаторов Y, иные чем данный индикатор  . Аналитические преобразования выражают физические соотношения между индикаторами, и они могут быть определены экспертами. Аналитические преобразования дополнительно могут включать в себя тождественное преобразование, линейные или нелинейные функции или преобразования, выдающие информацию о корреляциях между разными индикаторами.
. Аналитические преобразования выражают физические соотношения между индикаторами, и они могут быть определены экспертами. Аналитические преобразования дополнительно могут включать в себя тождественное преобразование, линейные или нелинейные функции или преобразования, выдающие информацию о корреляциях между разными индикаторами.
Для каждого данного индикатора  из набора индикаторов Y, этап E5 состоит в расчете соответствующей оценки
из набора индикаторов Y, этап E5 состоит в расчете соответствующей оценки  посредством использования методики регрессии для проецирования данного индикатора
посредством использования методики регрессии для проецирования данного индикатора  в пространство
в пространство  проекций, таким образом, формируя набор оценок
проекций, таким образом, формируя набор оценок  .
.
Другими словами, для каждого индикатора  , допустим:
, допустим:  является вектором из m индикаторов, X является вектором экзогенных данных, а
является вектором из m индикаторов, X является вектором экзогенных данных, а  является вектором из всех из индикаторов, иных чем
является вектором из всех из индикаторов, иных чем  . С использованием регрессионного способа, индикатор
. С использованием регрессионного способа, индикатор  затем проецируется в пространство
затем проецируется в пространство  проекций, для того чтобы определять оценку
проекций, для того чтобы определять оценку  . Регрессия может иметь тип нейронной сети, например, использующей модель с узлами и минимизацию методом наименьших квадратов. В разновидности, регрессия может иметь линейный тип.
. Регрессия может иметь тип нейронной сети, например, использующей модель с узлами и минимизацию методом наименьших квадратов. В разновидности, регрессия может иметь линейный тип.
Таким образом, для каждого индикатора, регрессия наблюдений строится в пространстве, образованном другими индикаторами, контекстными данными, выражениями, выведенными из анализа экспертами и другими функциями, например, реализованными в виде модели с узлами. Построенное пространство, в которое проецируются наблюдения, имеет большую размерность, чем исходное количество индикаторов.
Преимущественно, пространство проекций может строиться с использованием экспертных критериев с помощью физических формулировок соотношений между индикаторами, а также между индикаторами и экзогенными данными. Профессиональные знания эксперта могут использоваться не только для идентификации переменных, но также для определения пространства проекций. Например, могут быть измерения одного параметра, которые логарифмически зависят от измерений других параметров. Другие традиционные примеры могут относиться к переменным состояния, таким как энтальпия или энергия. В качестве примера, если энергия соответствует произведению двух индикаторов, то для постоянной энергии обратная величина одного индикатора служит для предсказания другого индикатора.
Иначе, когда эксперт не имеет априорных сведений о соотношениях между переменными, автоматический анализ при нормальной работе может находить такие соотношения.
Таким образом, пространство проекций также, например, может строиться автоматически посредством использования нейронной сети, например, типа, содержащего модель с узлами. В такой обстановке, все варианты выбора могут использоваться одновременно по умолчанию. Более того, может быть дано соображение в отношении нелинейных преобразований индикатора, который иногда может быть легче для предсказания. Эти преобразования могут выбираться из списка возможностей (логарифма, обратной величины, ограничения,...). По умолчанию, все приемлемые преобразования проверяются, и производится выбор на основе критерия устойчивости.
Устойчивость каждой оценки может анализироваться с использованием методики перекрестного оценивания, служащей для выбора наилучшего пространства проекций. Эта методика может повторно применяться на обратимых функциях каждой спроецированной оценки после анализа экспертом. В качестве примера, наилучшая регрессия должна сохраняться, и может быть легче моделировать логарифм индикатора, чем само его значение.
На этапе E6, средство 5 процессора сконфигурировано для нормирования каждой оценки  в качестве функции опорного значения для соответствующего индикатора
в качестве функции опорного значения для соответствующего индикатора  и разности между каждой данной оценкой и соответствующим индикатором
и разности между каждой данной оценкой и соответствующим индикатором  , для того чтобы формировать набор нормализованных значений
, для того чтобы формировать набор нормализованных значений  .
.
В частности, остаток модели (наблюдение минус оценка) может прибавляться к среднему или опорному значению, которое рассматривается в качестве являющегося стандартным значением индикатора.
Другими словами, каждое нормализованное значение  может рассчитываться прибавлением среднего или опорного значения соответствующего индикатора
может рассчитываться прибавлением среднего или опорного значения соответствующего индикатора  к разности между соответствующим индикатором
к разности между соответствующим индикатором  и соответствующей оценкой
и соответствующей оценкой  с использованием следующего уравнения
с использованием следующего уравнения  .
.
Этот расчет дает новое наблюдение, имеющее такую же размерность, как исходные индикаторы, и показывает разность между теми, которые наблюдались реально, и теми, которые ожидается, что должны наблюдаться, учитывая экзогенные данные и взаимные соотношения между индикаторами.
Нормализованные индикаторы будут колебаться около своих соответственных средних значений в качестве функции ошибок предсказания модели. Нормальное наблюдение, естественно, является наблюдением, для которого все остатки малы (то есть, меньше, чем кратное значение среднеквадратического отклонения  оцененного распределения ошибок, которое так или иначе известно. В противоположность, что касается аномального наблюдения, сигналы будут дальше от своих средних значений.
оцененного распределения ошибок, которое так или иначе известно. В противоположность, что касается аномального наблюдения, сигналы будут дальше от своих средних значений.
Первый пример приведен на фиг.5A и 5B, которые являются графическими представлениями индикатора, представляющего задержку для ожидания, чтобы вал низкого давления (LP) достиг максимального ускорения (вверх по оси ординат), после каждого запуска двигателя (вдоль оси абсцисс). Пунктирные линии c11 обозначают уровни  вокруг среднего значения, а линии c12 из точек и штрихов обозначают уровни
вокруг среднего значения, а линии c12 из точек и штрихов обозначают уровни  вокруг среднего значения.
вокруг среднего значения.
Фиг.5A показывает сигналы исходного индикатора до нормализации, а фиг.5B показывает сигналы индикатора после нормализации в соответствии с изобретением.
Фиг.5A показывает, что есть шесть сигналов S1-S6 (между номером 50 и номером 90 цикла запуска), которые отходят от среднего значения и которые медленнее в запуске.
Тем не менее, нормализация по фиг.5B, которая устраняет зависимости относительно внешнего контекста, показывает, что только сигнал S1 для цикла 67 запуска отходит от среднего значения. Это ясно показывает, что удаленное положение сигналов S2-S6 было обусловлено только внешними условиями, и что остается только сигнал S1, и что, к тому же, он теперь находится дальше от среднего значения, чем соответствующий сигнал на фиг.5A. Сигнал S1 является одноэлементной или отклоняющейся от нормы точкой, которая сильно отдалена от набора наблюдений и которая обусловлена тем обстоятельством, что эксперты, которые строят данные нормального наблюдения, часто пренебрегают некоторыми отклонениями от нормы. Во всяком случае, этот единичный элемент не включается в состав при анализе устойчивости, такой анализ может выполняться с использованием методики перекрестного оценивания или методики компенсированных вероятностей. Этот анализ выбирает, случайным образом, подмножество измерений для калибровки и проверяет результаты в отношении к другим наблюдениям.
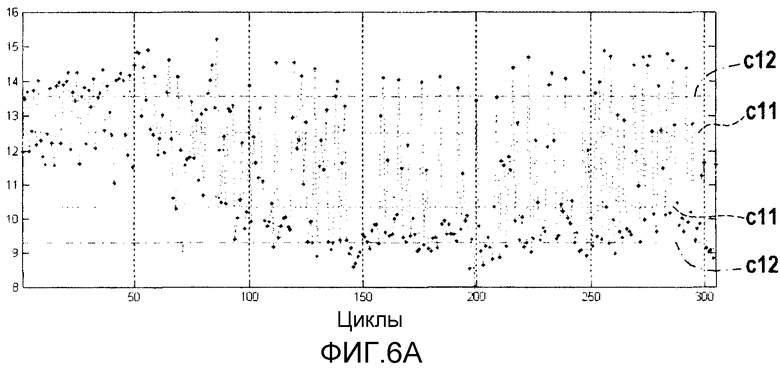
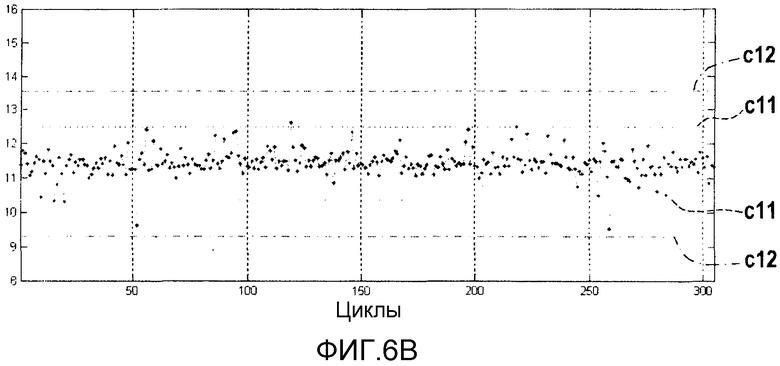
Еще один пример приведен на фиг.6A и 6B. Фиг.6A - графическое представление значений ненормализованного исходного индикатора, представляющего градиент температуры выхлопного газа, которая измеряется в авиационном двигателе при нормальной работе во время последующих полетов.
При условии, что двигатель работает нормально, несоразмерности между значениями, наблюдаемыми на фиг.6A, и средним значением по существу обусловлены разными условиями сбора данных.
В противоположность, фиг.6B показывает графическое представление после того, как индикатор по фиг.6A был нормализован в соответствии с настоящим изобретением. Это показывает, что значения нормализованного индикатора могут рассматриваться в качестве наблюдений, полученных в условиях, которые строго идентичны для каждого случая, в котором контролируется двигатель при каждом полете летательного аппарата. Нормализация индикаторов в соответствии с настоящим изобретением имеет эффект устранения зависимостей от внешнего контекста и учитывает стохастические соотношения взаимной зависимости между самими индикаторами.
Фиг.6B показывает, что при нормальной работе двигателя, вероятность наблюдения сигнала, который отходит от среднего значения на значение, которое больше, чем 3σ, является меньшей чем 3×10-3, а вероятность наблюдения значения, которое отходит на более чем  , является меньшей, чем 2×10-9. Это ясно показывает, что контроль элемента авиационного двигателя может выполняться идентичным образом независимо от внешних условий сбора данных. Таким образом, не только делается более простым применение к инструменту обнаружителя аномалий, но и делается более легким для экспертов осуществлять интерпретацию.
, является меньшей, чем 2×10-9. Это ясно показывает, что контроль элемента авиационного двигателя может выполняться идентичным образом независимо от внешних условий сбора данных. Таким образом, не только делается более простым применение к инструменту обнаружителя аномалий, но и делается более легким для экспертов осуществлять интерпретацию.
Более того, в предпочтительной реализации, различные этапы способа по изобретению выполняются посредством команд управляющей программы.
Следовательно, изобретение также предоставляет упомянутую компьютерную программу, программа является пригодной для реализации в средстве процессора или компьютерной системе, программа включает в себя команды управляющей программы, приспособленные для реализации способа по изобретению, как описано выше.
Программа может пользоваться любым языком программирования, и она может быть в форме исходного кода, объектного кода или кода, промежуточного между исходным кодом и объектным кодом, такой как в частично оттранслированной форме или в любой другой требуемой форме.
Можно использовать машиночитаемый носитель данных, который включает в себя команды компьютерной программы, как упомянуто выше.
Носитель данных может быть любой сущностью или устройством, способными к хранению программы. Например, носитель может содержать средство хранения, такое как постоянное запоминающее устройство (ПЗУ, ROM), например, ПЗУ на компакт диске (CD) или ПЗУ на микроэлектронных схемах, либо любое другое средство записи.
Более того, носитель информации может быть транспортируемым носителем, таким как электрический или оптический сигнал, который может передаваться через электрический или оптический кабель, по радио или другим средством.
В качестве альтернативы, носитель информации может быть интегральной схемой, в которой заключена программа, схема является приспособленной для выполнения, или для использования при выполнении, способа по изобретению.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИДЕНТИФИКАЦИЯ ОТКАЗОВ В АВИАЦИОННОМ ДВИГАТЕЛЕ | 2009 |
|
RU2522037C2 |
| ОБНАРУЖЕНИЕ АНОМАЛИЙ В АВИАЦИОННОМ ДВИГАТЕЛЕ | 2009 |
|
RU2497173C2 |
| СПОСОБ И УСТРОЙСТВО МОНИТОРИНГА КОНТУРА ОБРАТНОЙ СВЯЗИ ПРИВОДНОЙ СИСТЕМЫ ПЕРЕМЕННЫХ ГЕОМЕТРИЙ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2011 |
|
RU2580194C2 |
| КОНТРОЛЬ АВИАЦИОННОГО ДВИГАТЕЛЯ, ПРЕДВАРЯЮЩИЙ ОПЕРАЦИИ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ | 2014 |
|
RU2664126C2 |
| СПОСОБ И СИСТЕМА УДАЛЁННОЙ ИДЕНТИФИКАЦИИ И ПРОГНОЗИРОВАНИЯ РАЗВИТИЯ ЗАРОЖДАЮЩИХСЯ ДЕФЕКТОВ ОБЪЕКТОВ | 2018 |
|
RU2686257C1 |
| УСТРОЙСТВО И СПОСОБ ИЗВЛЕЧЕНИЯ ИНФОРМАЦИИ ИЗ ХАРАКТЕРИСТИЧЕСКИХ СИГНАЛОВ | 2012 |
|
RU2589389C2 |
| Способ формирования математических моделей пациента с использованием технологий искусственного интеллекта | 2017 |
|
RU2720363C2 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ УЗЛА КОМПОНЕНТОВ ОБОРУДОВАНИЯ | 2013 |
|
RU2635435C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИЙ ХРОМОФОРОВ БИОЛОГИЧЕСКОЙ ТКАНИ | 2012 |
|
RU2506567C1 |
| МУЗЫКАЛЬНО-АКУСТИЧЕСКИЙ КОМПЛЕКС КОНТРОЛЯ ВЫСОКОАВТОМАТИЗИРОВАННОГО ЛЕТАТЕЛЬНОГО АППАРАТА В ИСПЫТАТЕЛЬНОМ ПОЛЕТЕ | 2014 |
|
RU2549298C1 |
Изобретение относится к области техники контроля авиационного двигателя летательного аппарата, в частности к стандартизации данных, используемых для контроля авиационного двигателя. Технический результат заключается в обеспечении обработки соотношения зависимостей между индикаторами от экзогенных данных. Технический результат достигается за счет средства для работы на протяжении времени для сбора измерений временного ряда с упомянутого авиационного двигателя, средства для расчета, из упомянутых измерений временного ряда, набора индикаторов, характерных для элементов упомянутого двигателя, средства для идентификации, из упомянутых измерений временного ряда, набора экзогенных данных, представляющего внешний контекст, действующий на упомянутый набор индикаторов, средства для определения традиционной многомерной модели, одновременно обрабатывающей индикаторы из упомянутого набора индикаторов, наряду с принятием во внимание упомянутого набора экзогенных данных для формирования набора оценок, соответствующих упомянутому набору индикаторов, и средства для нормирования каждой оценки в качестве функции опорного значения для соответствующего индикатора и разности между каждой упомянутой оценкой и упомянутым соответствующим индикатором, с тем чтобы формировать набор нормализованных значений. 3 н. и 11 з.п. ф-лы, 8 ил.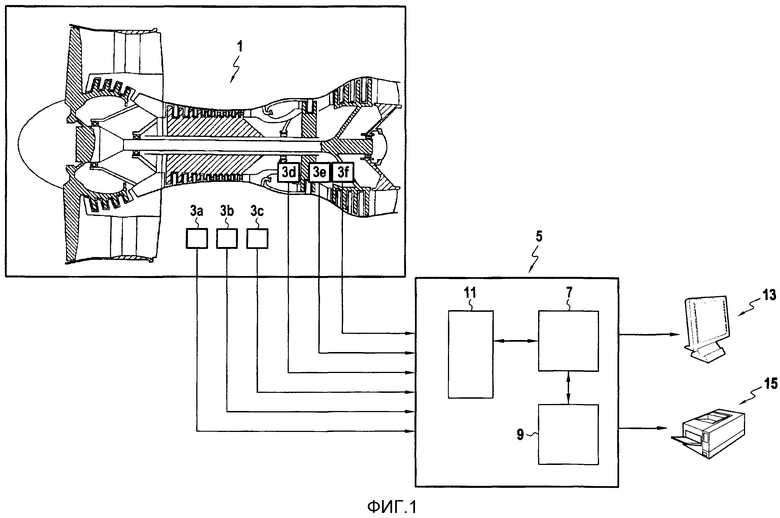
1. Способ нормализации данных, используемых для контроля авиационного двигателя (1), отличающийсяся тем, что он содержит следующие этапы, на которых:
собирают измерения временного ряда на протяжении времени касательно упомянутого авиационного двигателя (1);
из упомянутых измерений временного ряда рассчитывают набор индикаторов Y=(y1,…, yj,…, ym), которые характерны для элементов упомянутого двигателя;
из упомянутых измерений временного ряда идентифицируют набор X=(x1,…, xn) экзогенных данных, представляющий внешний контекст, действующий на упомянутый набор индикаторов Y;
для каждого индикатора yj из упомянутого набора индикаторов Y строят пространство E(j)=σ(Y(j), X) проекций, сформированное аналитическими преобразованиями подмножества индикаторов Y(j)=(y1,…, yj-1, yj+1,…ym), содержащего все из индикаторов из упомянутого набора индикаторов Y, за исключением каждого упомянутого индикатора yj, и упомянутым набором X экзогенных данных;
для каждого индикатора yj из упомянутого набора индикаторов Y рассчитывают соответствующую оценку  проецированием упомянутого индикатора yj с использованием метода регрессии в упомянутое пространство E(j)=σ(Y(j), X) проекций, тем самым формируя набор оценок
проецированием упомянутого индикатора yj с использованием метода регрессии в упомянутое пространство E(j)=σ(Y(j), X) проекций, тем самым формируя набор оценок  , соответствующих упомянутому набору индикаторов Y=(y1,…, yj,…, ym) и
, соответствующих упомянутому набору индикаторов Y=(y1,…, yj,…, ym) и
нормируют каждую оценку  в качестве функции опорного значения для соответствующего индикатора yj и разности между каждой упомянутой оценкой
в качестве функции опорного значения для соответствующего индикатора yj и разности между каждой упомянутой оценкой  и упомянутым соответствующим индикатором yj для формирования набора нормализованных значений
и упомянутым соответствующим индикатором yj для формирования набора нормализованных значений  .
.
2. Способ по п.1, отличающийся тем, что упомянутые измерения временного ряда собирают во время нормальной работы упомянутого авиационного двигателя.
3. Способ по п.1, отличающийся тем, что каждое нормализованное значение  рассчитывают прибавлением среднего или опорного значения для соответствующего индикатора
рассчитывают прибавлением среднего или опорного значения для соответствующего индикатора  к разности между соответствующим индикатором yj и соответствующей оценкой
к разности между соответствующим индикатором yj и соответствующей оценкой  с использованием следующего уравнения:
с использованием следующего уравнения:  .
.
4. Способ по п.1, отличающийся тем, что он включает в себя анализ устойчивости каждой оценки с использованием методики перекрестного оценивания, служащей для выбора оптимального пространства проекций.
5. Способ по п.1, отличающийся тем, что упомянутое пространство проекций строят с использованием экспертных критериев с помощью физических формулировок соотношений между индикаторами, а также между индикаторами и экзогенными данными.
6. Способ по п.1, отличающийся тем, что упомянутое пространство строят автоматически посредством использования нейронной сети.
7. Способ по п.6, отличающийся тем, что упомянутая нейронная сеть является моделью, имеющей узлы.
8. Способ по п.1, отличающийся тем, что индикаторы из упомянутого набора индикаторов Y=(y1,…, yj,…, ym) характерны для физических и/или логических элементов упомянутого двигателя.
9. Способ по п.1, отличающийся тем, что индикаторы из упомянутого набора индикаторов Y=(y1,…, yj,…, ym) рассчитывают с использованием экспертных критериев посредством построения FMECA.
10. Способ по п.1, отличающийся тем, что индикаторы идентифицируют посредством обращения к конкретным точкам или конкретным функциям, обобщающим детали или формы определенных кривых, представляющих упомянутые измерения временного ряда.
11. Способ по п.1, отличающийся тем, что экзогенные данные X=(x1,…, xn) действующие на индикаторы, идентифицируют с использованием экспертных критериев посредством анализа зависимостей, дающего возможность перечисляться контекстным данным, ассоциативно связанным с индикаторами.
12. Способ по п.1, отличающийся тем, что упомянутая регрессия является линейной регрессией.
13. Система для нормализации данных, используемых для контроля авиационного двигателя (1), отличающаяся тем, что она содержит:
средство (5) для работы на протяжении времени, чтобы собирать измерения временного ряда с упомянутого авиационного двигателя (1);
средство (5) для расчета, из упомянутых измерений временного ряда, набора индикаторов Y=(y1,…, yj,…, ym), характерных для элементов упомянутого двигателя;
средство (5) для идентификации, из упомянутых измерений временного ряда, набора X=(x1,…, xn) экзогенных данных, представляющего внешний контекст, действующий на упомянутый набор индикаторов Y;
средство (5) для построения, для каждого индикатора yj из упомянутого набора индикаторов Y, пространства E(j)=σ(Y(j), X) проекций, сформированного аналитическими преобразованиями подмножества индикаторов Y(j)=(y1,…, yj-1, yj+1,…ym), содержащего все из индикаторов из упомянутого набора индикаторов Y, за исключением yj каждого упомянутого индикатора yj, и упомянутым набором X экзогенных данных;
средство (5) для расчета, для каждого индикатора yj из упомянутого набора индикаторов Y, соответствующей оценки  посредством использования метода регрессии для проецирования каждого упомянутого индикатора yj в упомянутое пространство E(j)=σ(Y(j), X) проекций, формируя набор оценок
посредством использования метода регрессии для проецирования каждого упомянутого индикатора yj в упомянутое пространство E(j)=σ(Y(j), X) проекций, формируя набор оценок  , соответствующих упомянутому набору индикаторов Y=(y1,…, yj,…, ym); и
, соответствующих упомянутому набору индикаторов Y=(y1,…, yj,…, ym); и
средство (5) для нормирования каждой оценки  в качестве функции опорного значения для соответствующего индикатора yj и разности между каждой упомянутой оценкой
в качестве функции опорного значения для соответствующего индикатора yj и разности между каждой упомянутой оценкой  и упомянутым соответствующим индикатором yj, с тем чтобы формировать набор нормализованных значений
и упомянутым соответствующим индикатором yj, с тем чтобы формировать набор нормализованных значений  .
.
14. Машиночитаемый носитель данных, который включает в себя команды компьютерной программы для реализации способа нормализации по п.1, когда они выполняются средством процессора.
| Устройство для измерения скорости перемещения | 1987 |
|
SU1571509A1 |
| Измельчающий аппарат кормоуборочного комбайна | 1986 |
|
SU1457855A1 |
| US 6999884 B2, 14.02.2006 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 6449565 B1, 10.09.2002 | |||
| БОРТОВАЯ СИСТЕМА КОНТРОЛЯ АВИАДВИГАТЕЛЯ С ОГРАНИЧЕНИЕМ ЧАСТОТЫ ВРАЩЕНИЯ, ТЕМПЕРАТУРЫ И ТЯГИ | 2003 |
|
RU2249712C2 |

