ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области техники контроля авиационного двигателя. В частности, изобретение относится к идентификации отказов и к обнаружению неисправных компонентов в авиационном двигателе.
В многочисленных отраслях промышленности, таких как авиационная и космическая отрасли промышленности, важно быть способным идентифицировать отказы авиационного двигателя по измерениям, которые описывают мгновенное состояние двигателя, с тем чтобы приходить к заключению, какие физические компоненты неисправны, если таковые имеют место. Тем не менее, такие измерения временного ряда выражаются в многообразии разных физических блоков и они могут меняться от полета к полету произвольным образом, тем самым усложняя всякий анализ и обработку таких измерений.
Существуют так называемые инструментальные средства «построения количественных показателей», которые прибегают к замещению измерений временного ряда, которые могут быть выражены в различных единицах измерения, количественными показателями качества. Такие инструментальные средства основаны на расчетах правдоподобия, сводящихся к системам контроля качества. Тем не менее, инструментальные средства качественной оценки трудны для применения в многомерных областях, таких как контроль авиационного двигателя. Более того, такие количественные показатели соответствуют относительным значениям, которые не легко преобразуются в реальную окружающую среду, что нежелательно для эксперта по двигателям.
Также есть инструментальные средства классификации или присваивания обозначений, которые, вообще, сопровождают решения для обеспечения статистического контроля над промышленными способами. Тем не менее, таким инструментальным средствам классификации необходимо калиброваться в базах данных неисправностей, которые велики по размеру и очень трудны для получения, очень дорогостоящи и которые требуют большого объема времени вычислений. В частности, такие инструментальные средства классификации чрезвычайно трудны для применения в области авиационных двигателей. Это происходит потому, что, к счастью, есть очень мало реальных поломок авиационных двигателей, а потому очень трудно построить большую базу данных отказов.
ЦЕЛЬ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение предлагает способ идентификации отказов в авиационном двигателе, способ содержит следующие этапы:
• определение набора нормализованных индикаторов, которые являются представляющими работу упомянутого авиационного двигателя;
• построение вектора аномалий, представляющего поведение упомянутого двигателя в качестве функции упомянутого набора нормализованных индикаторов;
• в случае сбоя, выявляемого упомянутым вектором аномалий, выбор подмножества базисных векторов, имеющих направления, принадлежащие к определенной окрестности направления упомянутого вектора аномалий, упомянутое подмножество базисных векторов выбирается из набора базисных векторов, которые ассоциативно связаны с отказами упомянутого авиационного двигателя и которые определяются с использованием критериев, установленных экспертами; и
• идентификацию отказов, ассоциативно связанных с упомянутым подмножеством базисных векторов.
Этот способ позволяет легко интерпретировать векторы аномалий и базисные векторы, которые соответствуют характеристикам, которые представлены в физической системе координат, которая понятна экспертам по двигателям. Более того, можно полагаться на сведения, скорее собранные по экспертам, нежели на базу данных отказов или неисправностей, которая была бы очень дорогостоящей и трудной для построения. Это делает возможным идентифицировать отказы некоторым образом, который понятен и быстр, и при более низкой себестоимости.
В аспекте настоящего изобретения, выбор упомянутого подмножества базисных векторов содержит следующие этапы:
• расчет геодезических расстояний между направлением упомянутого вектора аномалий и направлениями упомянутых базисных векторов на сфере в пространстве размерности, равной количеству индикаторов из упомянутого набора нормализованных индикаторов минус количество линейных соотношений между упомянутыми индикаторами;
• сравнение упомянутых геодезических расстояний парами;
• классификацию базисных векторов в порядке возрастания их геодезических расстояний относительно упомянутого вектора аномалий; и
• формирование упомянутого подмножества базисных векторов из первых базисных векторов, имеющих порядок классификации, меньший, чем определенный ранг.
Это позволяет легко выбирать характеристики отказа, которые являются наиболее близкими, даже в пространстве большой размерности, посредством ограничения размерности задачи подпространством, которое порождено выбранными базисными векторами.
Согласно признаку настоящего изобретения, упомянутая сфера имеет радиус 1.
Согласно еще одному аспекту настоящего изобретения, идентификация отказов содержит следующие этапы:
• определение, для каждого базисного вектора, априорной вероятности возникновения с использованием критериев, установленных экспертами; и
• расчет, для каждого базисного вектора, апостериорной вероятности возникновения в качестве функции упомянутой априорной вероятности возникновения и упомянутых геодезических расстояний.
Это позволяет легко идентифицировать наиболее вероятные отказы.
Согласно признаку настоящего изобретения, упомянутый набор нормализованных индикаторов  содержит индикаторы
содержит индикаторы  , идентифицированные с использованием критериев, установленных экспертами.
, идентифицированные с использованием критериев, установленных экспертами.
Таким образом, эксперт по двигателям способен во все моменты времени к взаимодействию с и интерпретации характеристик аномалий.
Согласно еще одному признаку настоящего изобретения, упомянутый набор нормализованных индикаторов  дополнительно содержит динамические индикаторы, которые строятся в качестве функции индикаторов в настоящий и прошлые моменты
дополнительно содержит динамические индикаторы, которые строятся в качестве функции индикаторов в настоящий и прошлые моменты  , представляющих поведение на протяжении времени упомянутого авиационного двигателя.
, представляющих поведение на протяжении времени упомянутого авиационного двигателя.
Таким образом, можно добывать сведения о динамическом поведении авиационного двигателя и способе, которым оно изменяется.
Преимущественно, упомянутый вектор аномалий строится с использованием следующих этапов:
• формирование вектора  индикаторов из упомянутого набора индикаторов; и
индикаторов из упомянутого набора индикаторов; и
• построение упомянутого вектора  аномалий посредством повторного нормирования упомянутого вектора
аномалий посредством повторного нормирования упомянутого вектора  индикаторов с использованием следующей формулы:
индикаторов с использованием следующей формулы:
где  - среднее значение векторов индикаторов, а
- среднее значение векторов индикаторов, а  - ковариационная матрица, из которой рассчитывается псевдоинверсия
- ковариационная матрица, из которой рассчитывается псевдоинверсия  , а также корень квадратный
, а также корень квадратный  , посредством разложения по сингулярным значениям.
, посредством разложения по сингулярным значениям.
Это делает интерпретацию более легкой и облегчает расчет, выполняемый над векторами аномалий.
В дополнение, способ включает в себя следующие этапы:
• расчет нормы упомянутого вектора аномалий с использованием расстояния Махаланобиса:
 ; и
; и
• обнаружение сбоя упомянутого авиационного двигателя в зависимости от порога запускающего сигнала, определенного в качестве функции статистического распределения упомянутой нормы вектора аномалий.
Таким образом, норма вектора аномалий соответствует обобщенному количественному показателю, представляющему аномальное поведение, который является легким для определения в известном статистическом распределении, которое может быть приближенно выражено посредством  .
.
Преимущественно, упомянутый набор базисных векторов строится в соответствии с имитирующими поведениями индикаторов в случае аномалии.
Таким образом, базисные векторы могут легко строиться наряду с сохранением смысла, который понятен для экспертов.
Способ по изобретению также включает в себя следующие этапы:
• установление сетки решений при применении критериев, установленных экспертами;
• использование правил Байеса для выведения покомпонентных вероятностей отказа из апостериорных вероятностей возникновения и из упомянутой сетки решений; и
• обнаружение неисправных физических компонентов, которые ответственны за упомянутые отказы, на основании упомянутых покомпонентных вероятностей отказа.
Это облегчает отыскание оборудования, которое неисправно, таким образом, давая техническому обслуживанию и ремонту авиационного двигателя возможность выполняться быстро и эффективно.
Упомянутая сетка решений может быть сформирована матрицей условных вероятностей, что компонент неисправен, зная, что отказ был замечен, и из последовательности коэффициентов, соответствующих априорным вероятностям отказа каждого компонента.
Таким образом, сетка решений может легко строиться из знаний экспертов.
Преимущественно, упомянутая сетка решений дополняется машинным самообучением.
Это дает возможность строиться сетке решений, которая более точна и более устойчива.
Изобретение также предлагает систему для идентификации отказов в авиационном двигателе, система содержит:
• средство для определения набора нормализованных индикаторов, представляющих работу упомянутого авиационного двигателя;
• средство для построения вектора аномалий, представляющего поведение упомянутого двигателя в качестве функции упомянутого набора нормализованных индикаторов;
• средство для выбора, в случае аномалии, выявляемой упомянутым вектором аномалий, подмножества базисных векторов, имеющих направления, принадлежащие к определенной окрестности направления упомянутого вектора аномалий, упомянутое подмножество базисных векторов выбирается из набора базисных векторов, которые ассоциативно связаны с отказами упомянутого авиационного двигателя и определяются с использованием критериев, установленных экспертами; и
• средство для идентификации отказов, ассоциативно связанных с упомянутым подмножеством базисных векторов.
Изобретение также предлагает компьютерную программу, включающую в себя команды для реализации способа идентификации отказов, использующего вышеприведенные этапы, когда выполняются средством процессора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие признаки и преимущества устройства и способа по изобретению лучше проявляются по прочтении последующего описания, приведенного в качестве неограничивающего указания со ссылкой на прилагаемые чертежи, на которых:
• фиг.1 показывает аппаратные средства, реализованные в системе или способе по изобретению для идентификации отказов в авиационном двигателе.
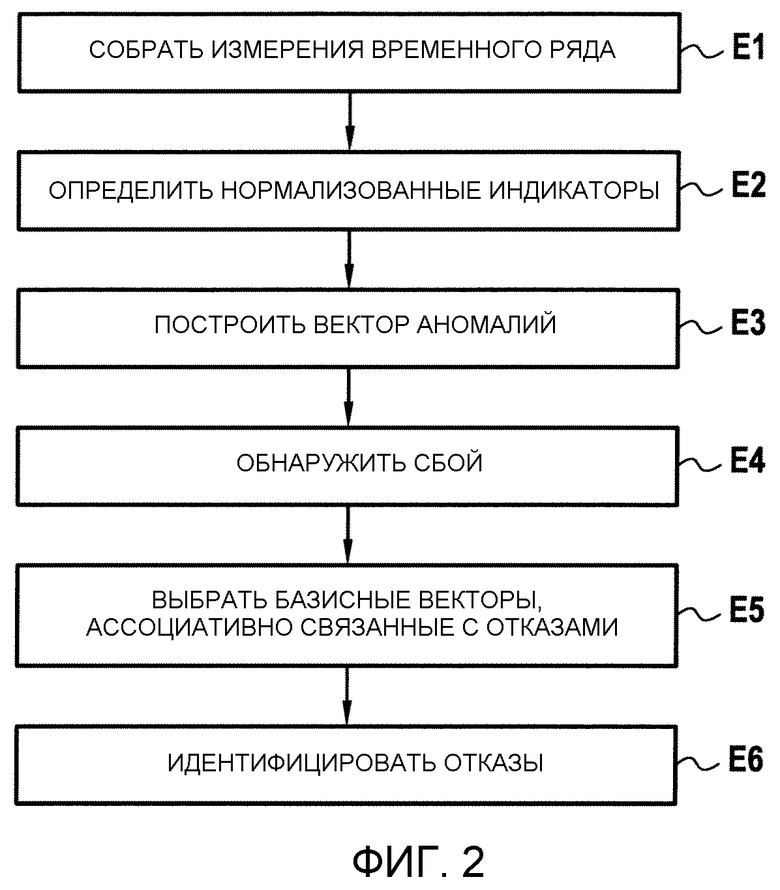
• фиг.2 - блок-схема последовательности операций способа, показывающая основные этапы для идентификации отказов авиационного двигателя по фиг.1; и
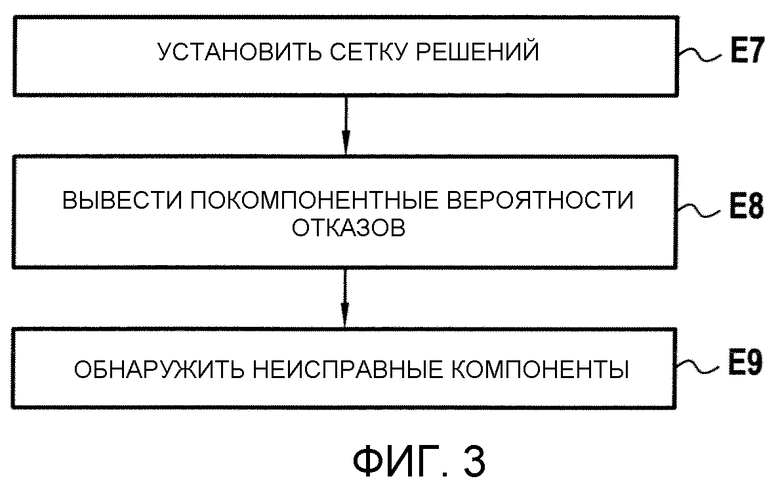
• фиг.3 - блок-схема последовательности операций способа, показывающая основные этапы для обнаружения неисправных компонентов в авиационном двигателе по фиг.1.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг.1 показывает аппаратные средства, реализованные в системе или способе по изобретению для идентификации отказов в авиационном двигателе 1.
Система содержит множество датчиков 3a-3f для измерения данных временного ряда, относящихся к двигателю 1 и его окружающей среде. Система также включает в себя средство 5 процессора для обработки информации, такое как вычислитель или компьютер, допускающий использование для выполнения компьютерной программы, предназначенной для реализации способа по изобретению. Средство 5 процессора содержит аппаратные средства, которые традиционно обнаруживаются в компьютере. Более подробно, средство 5 процессора содержит центральный блок 7, который выполняет последовательности команд программы способа по изобретению, центральную память 9, которая хранит данные и программы, являющиеся выполняемыми, средство или носители 11 хранения для вмещения цифрового хранения данных, периферийные устройства ввода (датчики 3a-3f, клавиатуру, мышь,...) и периферийные устройства вывода (экран 13, принтер 15,...) для доставки результата идентификации отказов.
Фиг.2 показывает основные этапы, реализованные в соответствии с изобретением средством 5 процессора для идентификации отказов в авиационном двигателе 1.
На этапе E1, средство 5 процессора сконфигурировано для действия на протяжении времени, чтобы собирать и оцифровывать измерения временного ряда, которые получаются датчиками 3a-3f с авиационного двигателя 1 и его окружающей среды.
На этапе E2, средство 5 процессора сконфигурировано для определения нормализованных индикаторов.
На основе измерений временного ряда можно рассчитывать индикаторы  , которые характерны для элементов двигателя 1. Например, один индикатор может соответствовать задержке, необходимой, чтобы вал двигателя достигал максимального ускорения после каждого запуска двигателя, другой индикатор может быть градиентом температуры выхлопного газа из двигателя и т.д.
, которые характерны для элементов двигателя 1. Например, один индикатор может соответствовать задержке, необходимой, чтобы вал двигателя достигал максимального ускорения после каждого запуска двигателя, другой индикатор может быть градиентом температуры выхлопного газа из двигателя и т.д.
Должно быть отмечено, что индикаторы могут быть характерны для физических элементов, указывающих на конкретный элемент двигателя 1, или логических элементов, указывающих на характерную задачу полного набора элементов двигателя 1.
Эти индикаторы  могут рассчитываться с использованием критериев, предоставленных экспертами, например, на основе документа, который составляется экспертами по двигателям и известен как анализ видов, последствий и критичности отказов (FMECA). Такой документ перечисляет отказы, вовлеченные единицы оборудования, причины, следствия, а также индикаторы, которые рассчитаны из вышеприведенных измерений, которые дают возможность идентифицироваться явлению, каждый из них ассоциативно связан с описанием эффектов, которые наблюдаются.
могут рассчитываться с использованием критериев, предоставленных экспертами, например, на основе документа, который составляется экспертами по двигателям и известен как анализ видов, последствий и критичности отказов (FMECA). Такой документ перечисляет отказы, вовлеченные единицы оборудования, причины, следствия, а также индикаторы, которые рассчитаны из вышеприведенных измерений, которые дают возможность идентифицироваться явлению, каждый из них ассоциативно связан с описанием эффектов, которые наблюдаются.
После этого, индикаторы  могут нормализоваться, например, с использованием традиционной технологии нормирования в качестве функции среднего значения и среднеквадратического отклонения, которые рассчитываются априори на основе ранее оцифрованной последовательности данных.
могут нормализоваться, например, с использованием традиционной технологии нормирования в качестве функции среднего значения и среднеквадратического отклонения, которые рассчитываются априори на основе ранее оцифрованной последовательности данных.
В варианте, можно определять нормализованные индикаторы  , которые независимы от внешнего контекста и которые к тому же учитывают стохастические соотношения зависимости между самими индикаторами.
, которые независимы от внешнего контекста и которые к тому же учитывают стохастические соотношения зависимости между самими индикаторами.
Каждое измерение, собранное во время полета, берется при конкретных внешних или внутренних условиях. Эти условия, которые могут оказывать влияние на то, каким образом должны интерпретироваться индикаторы, сами могут измеряться и записываться в качестве данных из внешних источников. Внешние условия могут содержать наружные температуры и давления, относительное положение в пространстве и относительную скорость самолета, где происходит полет (над морем, пустыней, землей и т.д.), метеорологические условия (дождь, снег, обледенение и т.д.), относительную влажность и т.д. Внутренние условия могут относиться к особому использованию двигателя (частоте вращения вала, температуре выхлопного газа, типу топлива и т.д.). В качестве примера данных из внешних источников, температура масла немедленно после запуска двигателя может рассматриваться в качестве контекстных данных, которые проводят отличие между двумя типами запуска (холодного запуска или горячего запуска).
Таким образом, из измерений временного ряда, произведенных датчиками 3a-3f, можно идентифицировать набор  данных из внешних источников, представляющих внешний контекст, действующий на индикаторы
данных из внешних источников, представляющих внешний контекст, действующий на индикаторы  . Это может выполняться с использованием критериев экспертов, выполняющих анализ зависимостей, давая возможность перечислять контекстные данные, которые ассоциативно связаны с индикаторами.
. Это может выполняться с использованием критериев экспертов, выполняющих анализ зависимостей, давая возможность перечислять контекстные данные, которые ассоциативно связаны с индикаторами.
После этого, для каждого индикатора регрессия наблюдений строится в пространстве, которое образовано другими индикаторами, контекстными данными, выражениями, полученными из анализа экспертов, и другими функциями, например, которые реализованы в виде модели с узлами. Пространство, которое построено и в которое проецируются наблюдения, имеет большую размерность, чем количество исходных индикаторов.
Другими словами, для каждого заданного индикатора  строится пространство
строится пространство  проекций. Это пространство проекций образовано набором
проекций. Это пространство проекций образовано набором  данных из внешних источников и аналитическими преобразованиями подмножества индикаторов
данных из внешних источников и аналитическими преобразованиями подмножества индикаторов  , который содержит все из исходных индикаторов, иных, чем данный индикатор
, который содержит все из исходных индикаторов, иных, чем данный индикатор  . Аналитические преобразования выражают физические соотношения между индикаторами, и они могут быть определены экспертами. Аналитические преобразования также могут включать в себя тождественное преобразование и линейные или нелинейные функции либо функции, выдающие информацию о корреляциях между разными индикаторами. После этого, для каждого данного индикатора
. Аналитические преобразования выражают физические соотношения между индикаторами, и они могут быть определены экспертами. Аналитические преобразования также могут включать в себя тождественное преобразование и линейные или нелинейные функции либо функции, выдающие информацию о корреляциях между разными индикаторами. После этого, для каждого данного индикатора  соответствующая оценка
соответствующая оценка  рассчитывается посредством использования метода регрессии для проецирования данного индикатора в пространство
рассчитывается посредством использования метода регрессии для проецирования данного индикатора в пространство  проекций, тем самым формируя набор оценок
проекций, тем самым формируя набор оценок  .
.
В заключение, каждая оценка  может нормироваться в качестве функции базисного значения для соответствующего индикатора
может нормироваться в качестве функции базисного значения для соответствующего индикатора  , а остаток или разность между каждой данной оценкой
, а остаток или разность между каждой данной оценкой  и соответствующим индикатором , с тем чтобы формировать нормализованные индикаторы
и соответствующим индикатором , с тем чтобы формировать нормализованные индикаторы  , представляющие работу двигателя 1.
, представляющие работу двигателя 1.
На основе этих нормализованных индикаторов  , построенных с использованием вышеприведенных способов или любого другого способа, цель состоит в том, чтобы диагностировать аномалию, а затем установить происхождение характерного отказа и, возможно, затронутых физических компонентов.
, построенных с использованием вышеприведенных способов или любого другого способа, цель состоит в том, чтобы диагностировать аномалию, а затем установить происхождение характерного отказа и, возможно, затронутых физических компонентов.
Тем не менее, перед диагностированием аномалий, можно, в дополнение к индикаторам  , которые идентифицированы экспертами, добавлять индикаторы касательно недавнего прошлого (тренд, кривизну, ускорение, форму...), с тем чтобы также добывать сведения о динамическом поведении двигателя и, таким образом, каким образом оно меняется.
, которые идентифицированы экспертами, добавлять индикаторы касательно недавнего прошлого (тренд, кривизну, ускорение, форму...), с тем чтобы также добывать сведения о динамическом поведении двигателя и, таким образом, каким образом оно меняется.
Последующее наблюдение индикаторов может давать динамическую информацию об индикаторах. При условии, что нормализованные индикаторы пригодны для сравнения (которое не достоверно у исходных индикаторов), возможно, чтобы нормализованные индикаторы, которые идентифицированы экспертами, комбинировались динамическим образом.
Таким образом, можно определять набор нормализованных индикаторов  , которые зависят от времени поведения авиационного двигателя 1 и которые содержат как индикаторы
, которые зависят от времени поведения авиационного двигателя 1 и которые содержат как индикаторы  , которые идентифицированы экспертами, так и динамические индикаторы, построенные в качестве функции индикаторов
, которые идентифицированы экспертами, так и динамические индикаторы, построенные в качестве функции индикаторов  , которые идентифицированы экспертами, как они есть в настоящем и как они были в прошлом
, которые идентифицированы экспертами, как они есть в настоящем и как они были в прошлом  .
.
Этап E3 относится к построению характеристики аномалии, которая является представляющей поведение двигателя 1. Более точно, средство 5 процессора сконфигурировано для построения вектора аномалий (или характеристики аномалии) в качестве функции набора нормализованных индикаторов  .
.
Построение вектора аномалий может выполняться изначально посредством формирования вектора  индикаторов размерности n из набора нормализованных индикаторов
индикаторов размерности n из набора нормализованных индикаторов  . После этого, можно строить нормализованный вектор z аномалий посредством повторного нормирования вектора
. После этого, можно строить нормализованный вектор z аномалий посредством повторного нормирования вектора  индикаторов.
индикаторов.
Должно быть отмечено, что для нормализованных индикаторов, рассчитанных посредством остатков, полученных с использованием технологии минимизации методом наименьших квадратов, вектор  индикаторов может быть достаточно нормирован многомерным нормальным распределением.
индикаторов может быть достаточно нормирован многомерным нормальным распределением.
Более точно, среднее значение  нормализованных векторов
нормализованных векторов  индикаторов вычитается, так что вектор центрирован, рассчитывается ковариационная матрица
индикаторов вычитается, так что вектор центрирован, рассчитывается ковариационная матрица  , а затем вектор аномалий формируется спрямлением вектора
, а затем вектор аномалий формируется спрямлением вектора  индикаторов посредством ковариационной матрицы
индикаторов посредством ковариационной матрицы  с использованием следующей формулы:
с использованием следующей формулы: ,
,
использующей корень квадратный псевдоинверсии  , рассчитанной разложением по сингулярным значениям
, рассчитанной разложением по сингулярным значениям  , причем
, причем  и
и  . Таким образом, нормализованный вектор z аномалий может приблизительно придерживаться нормального гауссова распределения в дополнение существенной части
. Таким образом, нормализованный вектор z аномалий может приблизительно придерживаться нормального гауссова распределения в дополнение существенной части  размерности
размерности  , которая идентифицируется сингулярными значениями, рассматриваемыми в качестве являющихся приблизительно нулевыми.
, которая идентифицируется сингулярными значениями, рассматриваемыми в качестве являющихся приблизительно нулевыми.
Этап E4 является проверкой на сбой. Средство 5 процессора сконфигурировано для диагностирования, выявляет ли аномалию характеристика или вектор аномалии.
Нормальные характеристики являются довольно плоскими, тогда как сбои представлены большими колебаниями и являются легко интерпретируемыми.
Таким образом, аномалия может обнаруживаться посредством расчета нормы вектора аномалий, например, с использованием расстояния Махаланобиса, выраженного с использованием следующей формулы:

где µ - среднее значение нормализованных векторов  индикаторов, а
индикаторов, а  - ковариационная матрица. Преимущественно, статистическое распределение расстояния Махаланобиса известно и может быть приближенно выражено посредством
- ковариационная матрица. Преимущественно, статистическое распределение расстояния Махаланобиса известно и может быть приближенно выражено посредством  . Более того, уровни
. Более того, уровни  и
и  (где
(где  - среднеквадратическое отклонение) относительно среднего значения могут быть получены непосредственно аналитическим расчетом. Следовательно, легко обнаруживать сбой авиационного двигателя на основе порога инициирующего сигнала, определенного в качестве функции статистического распределения нормы вектора аномалий.
- среднеквадратическое отклонение) относительно среднего значения могут быть получены непосредственно аналитическим расчетом. Следовательно, легко обнаруживать сбой авиационного двигателя на основе порога инициирующего сигнала, определенного в качестве функции статистического распределения нормы вектора аномалий.
Таким образом, норма вектора аномалий может рассматриваться в качестве глобального количественного показателя, представляющего аномальное поведение и который является легким для обнаружения.
В случае сбоя также можно визуализировать тип отказа, выполняя двухмерное проецирования векторов аномалий.
В конце проверки на этапе E4 способ естественно переходит на следующий этап E5 только в случае вектора аномалий, выявляющего сбой.
Этап E5 относится к выбору эталонных характеристик, соответствующих перечисленным отказам авиационного двигателя.
Более точно, в случае сбоя, выявляемого вектором аномалий, средство 5 процессора сконфигурировано для выбора подмножества эталонных характеристик или векторов, имеющих направления, принадлежащие к определенной окрестности, или направление вектора аномалий. Подмножество базисных векторов выбирается из предопределенного набора базисных векторов (или эталонных характеристик), ассоциативно связанных с отказами авиационного двигателя и определенных с использованием критериев, установленных экспертами.
Набор базисных векторов может строиться в соответствии с имитирующими поведениями индикаторов в случае аномалии.
При разработке FMECA эксперты могут перечислять все разновидности возможных отказов, причем каждому отказу назначается априорная вероятность возникновения и причем достаточное количество элементов предоставляется для определения имитирующего поведения индикаторов в случае аномалий. Имитирующее поведение обычно описывается на линиях неформально: «это значение очень велико», «это другое значение увеличивается очень медленно», «оно может быть небольшим, когда последнее значение велико» и так далее.
Имитирующие поведения могут преобразовываться известным образом в виде количественных показателей, сводящихся к построению списка известных отказов. Более того, при условии контекста, который является стандартным, этот список дает возможность строиться примерам классифицированных отказов. Эти примеры могут быть в виде векторов, которые нормированы, с тем чтобы строить нормализованную матрицу, включающую в себя нормализованный базисный вектор в каждой строке. Как результат, FMECA служит для определения базисных векторов, которые описывают имитирующим образом перечисленные отказы в системе координат, которая реальна и понятна для экспертов по двигателям. В дополнение, FMECA дает возможность определять априорную вероятность возникновения, которая ассоциативно связана с каждым базисным вектором.
Должно быть отмечено, что при условии, что определения отказов являются имитирующими, могут учитываться только направления базисных векторов. Таким образом, подмножество базисных векторов может классифицироваться или выбираться сравнением вектора аномалий с базисными векторами на сфере (n-k-1) в векторном пространстве размерности n-k, равной количеству индикаторов в наборе нормализованных индикаторов  , минус количество линейных соотношений k между этими индикаторами.
, минус количество линейных соотношений k между этими индикаторами.
Это может выполняться посредством расчета геодезических расстояний между проекцией вектора аномалий и проекциями базисных векторов на сфере. Расчет расстояний между векторами становится бессмысленным в пространстве размерности, большей чем пять.
Более точно, геодезические расстояния рассчитываются между направлением вектора аномалий и направлениями базисных векторов на сфере. Таким образом, направление вектора аномалий может сравниваться с направлениями базисных векторов посредством расчета геодезического расстояния на сфере радиуса 1.
Геодезическое расстояние  между вектором z аномалий и нормализованным базисным вектором t (стандартным «образцом») может быть приближенно выражено в качестве нормированного скалярного произведения с использованием следующей формулы:
между вектором z аномалий и нормализованным базисным вектором t (стандартным «образцом») может быть приближенно выражено в качестве нормированного скалярного произведения с использованием следующей формулы:
Естественно, можно не использовать понятие расстояния в качестве параметра распределения в пространстве высокой размерности.
Тем не менее, можно сравнивать эти геодезические расстояния парами, которые дают возможность классифицировать базисные векторы, например, в порядке возрастания их геодезических расстояний относительно вектора аномалий. В таком случае можно формировать подмножество базисных векторов из первых базисных векторов порядка классификации, более низкого, чем предопределенный ранг. Например, можно выбирать первые три, четыре или пять базисных векторов для формирования подмножества нескольких базисных векторов, которые являются представляющими более вероятные отказы.
На этапе E6, средство 5 процессора сконфигурировано для идентификации отказов, ассоциативно связанных с ранее заранее выбранным подмножеством базисных векторов.
Более точно, геодезические расстояния используются для идентификации более вероятных отказов. Поскольку всегда можно выбрать основные базовые векторы, наиближайшие к вектору аномалий, можно ограничивать вероятностную модель в соответствующей подсфере меньшей размерности и использовать геодезические расстояния для расчета апостериорной локальной вероятности возникновения. Чтобы сделать это, используется модель смешанных гауссианов на сфере. Радиусы гауссианов зависят от априорных критериев, установленных экспертами.
Таким образом, для каждого базисного вектора можно рассчитывать апостериорную вероятность P(f) отказа f, возникающего в качестве функции априорной вероятности каждого возникновения отказа f, которое определено экспертами при разработке FMECA, и геодезических расстояний, используемых для классификации подмножества базисных векторов.
Апостериорная вероятность возникновения P(f) может рассчитываться с использованием вероятностной модели, имеющей в качестве параметра весовой коэффициент  , определенный экспертами для каждого базисного вектора t, с использованием следующей формулы:
, определенный экспертами для каждого базисного вектора t, с использованием следующей формулы:
где  - геодезическое расстояние между вектором z аномалий и базисным вектором t; и где
- геодезическое расстояние между вектором z аномалий и базисным вектором t; и где  рассчитывается с использованием априорной вероятности возникновения, ассоциативно связанной с базисным вектором t.
рассчитывается с использованием априорной вероятности возникновения, ассоциативно связанной с базисным вектором t.
Таким образом, норма d
2 вектора аномалий дает уровень ненормальности, а геодезическое расстояние  служит для идентификации более вероятных отказов. Это выполняется, полагаясь на сведения, собранные от экспертов, и не полагаясь на базу данных отказов.
служит для идентификации более вероятных отказов. Это выполняется, полагаясь на сведения, собранные от экспертов, и не полагаясь на базу данных отказов.
Фиг.3 показывает основные этапы, реализованные средством 5 процессора, для обнаружения неисправных компонентов в авиационном двигателе 1.
После идентификации отказов посредством расчета вероятности возникновения для каждого из них можно использовать вероятность для обнаружения неисправных компонентов. Чтобы делать это, производится использование сетки решений, определенной экспертами и дающей, для каждого физического компонента под анализом, вероятность становления неисправным, когда наблюдается точно установленный отказ.
Таким образом, на этапе E7, средство 5 процессора сконфигурировано для установления сетки решений на основе критериев, установленных экспертами. Сетка решений может быть сформирована матрицей Q = (q f,c ) условных вероятностей q f,с = P(c/f), что компонент c неисправен, при условии, что отказ f был замечен, и последовательностью коэффициентов, соответствующих априорным вероятностям отказов каждого компонента c. Матрица Q = (q f,c ) является симметричной положительной матрицей.
Более того, может наблюдаться, что сетка решений может дополняться запуском машинного обучения. Основная роль такого обучения состоит только в том, чтобы верифицировать информацию, предоставленную экспертами, таким образом, избегая какой бы то ни было необходимости строить базу данных.
На этапе E8, средство 5 процессора сконфигурировано для использования правил Байеса для выведения покомпонентных вероятностей P(c) отказа для каждого компонента c на основе апостериорных вероятностей возникновения P(f) и сетки Q = (q f.,c ) решений.
Таким образом, для каждого компонента c можно оценивать вероятность отказа P(c), которая задана следующей формулой:

где  - коэффициент нормирования, который соответствует априорному возникновению неисправного компонента. Более того, результат формулы усекается между 0 и 1.
- коэффициент нормирования, который соответствует априорному возникновению неисправного компонента. Более того, результат формулы усекается между 0 и 1.
В заключение, на этапе E9, средство 5 процессора сконфигурировано для обнаружения неисправных физических компонентов, которые ответственны за отказы, посредством использования покомпонентных вероятностей отказа, рассчитанных на предыдущем этапе.
Должно быть отмечено, что, когда обнаружена аномалия, этап E6 расчета апостериорных вероятностей P(f) возникновения отказов делает легким представление вероятности каждого отказа схематично в таблице или на изображении. Более того, обнаружение неисправных компонентов на этапе E9 дает возможность строить другое изображение, в котором каждый отказ замещен реальным наименованием компонента. Эти изображения затем легко учитываются экспертами.
Таким образом, настоящее изобретение, прежде всего, служит для диагностирования аномалии, а затем для классификации отказов, ассоциативно связанных с такой аномалией, посредством использования способа, который открыт и пригоден для интерпретации экспертами по двигателям.
Более того, развязывание обнаружения сбоя от классификации отказов дает возможность обнаруживаться новым типам отказа, которые не перечислены экспертами, дает им возможность анализироваться, а тогда дает им возможность в свою очередь быть включенными в список потенциальных отказов.
Более того, в предпочтительной реализации, различные этапы способа по изобретению выполняются посредством команд управляющей программы.
Следовательно, изобретение также предоставляет компьютерный программный продукт, программа является допускающей реализацию в средстве процессора или компьютерной системе, программа включает в себя команды управляющей программы, приспособленные для реализации способа по изобретению, как описано выше.
Программа может пользовать любой язык программирования и быть в форме исходного кода, объектного кода или кода, промежуточного между исходным кодом и объектным кодом, такой как в частично оттранслированной форме или в любой другой требуемой форме.
Изобретение также предусматривает носитель данных, читаемый компьютером и включающий в себя команды компьютерной программы, как упомянуто выше.
Носитель данных может быть любой сущностью или устройством, способными к хранению программы. Например, носитель может содержать средство хранения, такое как постоянное запоминающее устройство (ПЗУ, ROM), например ПЗУ на компакт диске (CD) или ПЗУ на микроэлектронных схемах, либо любое другое средство записи.
Более того, носитель данных может быть транспортируемым носителем, таким как электрический или оптический сигнал, который может передаваться через электрический или оптический кабель, по радио или другим средством.
В качестве альтернативы, носитель данных может быть интегральной схемой, в которой заключена программа, схема является приспособленной для выполнения, или для использования при выполнении, данного способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| НОРМАЛИЗАЦИЯ ДАННЫХ, ИСПОЛЬЗУЕМЫХ ДЛЯ КОНТРОЛЯ АВИАЦИОННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2522308C2 |
| ОБНАРУЖЕНИЕ АНОМАЛИЙ В АВИАЦИОННОМ ДВИГАТЕЛЕ | 2009 |
|
RU2497173C2 |
| ЭКСПЕРТНАЯ СИСТЕМА КОНТРОЛЯ РАБОТЫ БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2517422C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2816667C1 |
| СПОСОБ И СИСТЕМА УДАЛЁННОЙ ИДЕНТИФИКАЦИИ И ПРОГНОЗИРОВАНИЯ РАЗВИТИЯ ЗАРОЖДАЮЩИХСЯ ДЕФЕКТОВ ОБЪЕКТОВ | 2018 |
|
RU2686257C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ДИАГНОСТИКИ ПРОМЫШЛЕННОГО ОБЪЕКТА НА ОСНОВЕ АНАЛИЗА АКУСТИЧЕСКИХ СИГНАЛОВ | 2020 |
|
RU2749640C1 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2023 |
|
RU2809719C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ИСКЛЮЧЕНИЯ МНОЖЕСТВЕННЫХ ОТКАЗОВ СПУТНИКОВ СИСТЕМЫ ГНСС | 2011 |
|
RU2559842C2 |
| ПИЛОТАЖНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2004 |
|
RU2263973C1 |
Изобретение относится к области техники контроля авиационного двигателя, в частности к идентификации отказов и к обнаружению неисправных компонентов в авиационном двигателе. Технический результат заключается в сокращении времени, необходимого для идентификации отказов в авиационном двигателе за счет обеспечения интерпретации векторов аномалий и базисных векторов, которые соответствуют характеристикам, представленным в физической системе координат. Технический результат достигается за счет средства для определения набора нормализованных индикаторов, представляющих работу упомянутого авиационного двигателя, средства для построения вектора аномалий, представляющего поведение упомянутого двигателя в качестве функции упомянутого набора нормализованных индикаторов, средства для выбора, в случае аномалии, выявляемой упомянутым вектором аномалий, подмножества базисных векторов, имеющих направления, принадлежащие к определенной окрестности направления упомянутого вектора аномалий, упомянутое подмножество базисных векторов выбирается из набора базисных векторов, ассоциативно связанных с отказами упомянутого авиационного двигателя, и определенных с использованием критериев, установленных экспертами, и средства для идентификации отказов, ассоциативно связанных с упомянутым подмножеством базисных векторов. 3 н. и 12 з.п. ф-лы, 3 ил.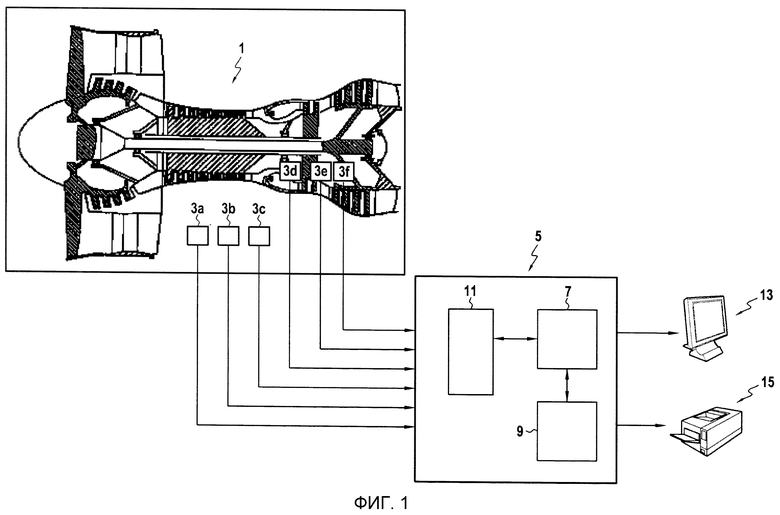
1. Способ идентификации отказов в авиационном двигателе (1), способ отличается тем, что он содержит следующие этапы, на которых:
- используют датчики (3a-3f) для сбора измерений временного ряда с упомянутого авиационного двигателя (1) и его окружающей среды;
- используют средство (5) процессора для расчета, из упомянутых измерений временного ряда, индикаторов, которые характерны для элементов упомянутого авиационного двигателя (1);
- используют средство (5) процессора для определения, из упомянутых характерных индикаторов, набора нормализованных индикаторов, которые являются представляющими работу упомянутого авиационного двигателя (1);
- используют средство (5) процессора для построения вектора аномалий, представляющего поведение упомянутого двигателя (1) в качестве функции упомянутого набора нормализованных индикаторов;
- используют средство (5) процессора, в случае сбоя, выявляемого упомянутым вектором аномалий, для выбора подмножества базисных векторов, имеющих направления, принадлежащие к определенной окрестности направления упомянутого вектора аномалий, упомянутое подмножество базисных векторов выбирается из набора базисных векторов, ассоциативно связанных с отказами упомянутого авиационного двигателя (1) и определенных с использованием критериев, установленных экспертами; и
- используют средство (5) процессора для идентификации отказов, ассоциативно связанных с упомянутым подмножеством базисных векторов;
и тем, что выбор упомянутого подмножества базисных векторов содержит этапы, на которых:
- используют средство (5) процессора для расчета геодезических расстояний между проекцией упомянутого вектора аномалий и проекциями упомянутых базисных векторов на сфере в пространстве размерности, равной количеству индикаторов в упомянутом наборе нормализованных индикаторов минус количество линейных соотношений между индикаторами;
- используют средство (5) процессора для сравнения упомянутых геодезических расстояний парами;
- используют средство (5) процессора для классификации базисных векторов в порядке возрастания геодезических расстояний относительно упомянутого вектора аномалий; и
- используют средство (5) процессора для формирования упомянутого подмножества базисных векторов из первых базисных векторов, имеющих порядок классификации, меньший, чем определенный ранг.
2. Способ по п.1, отличающийся тем, что упомянутая сфера имеет радиус 1.
3. Способ по п.1, отличающийся тем, что он включает в себя следующие этапы, на которых:
- используют средство (5) процессора для определения, для каждого базисного вектора, априорной вероятности возникновения на основе критериев, установленных экспертами; и
- используют средство (5) процессора для расчета, для каждого базисного вектора, апостериорной вероятности возникновения в качестве функции упомянутой априорной вероятности возникновения и упомянутых геодезических расстояний.
4. Способ по п.1, отличающийся тем, что упомянутый набор нормализованных индикаторов  содержит индикаторы
содержит индикаторы  , идентифицированные средством (5) процессора с использованием критериев, установленных экспертами.
, идентифицированные средством (5) процессора с использованием критериев, установленных экспертами.
5. Способ по п.4, отличающийся тем, что упомянутый набор нормализованных индикаторов  дополнительно содержит динамические индикаторы, построенные средством (5) процессора в качестве функции индикаторов в настоящий и прошлые моменты
дополнительно содержит динамические индикаторы, построенные средством (5) процессора в качестве функции индикаторов в настоящий и прошлые моменты  , представляющие поведение упомянутого авиационного двигателя на протяжении времени.
, представляющие поведение упомянутого авиационного двигателя на протяжении времени.
6. Способ по п.1, отличающийся тем, что построение упомянутого вектора аномалий состоит в том, что:
- используют средство (5) процессора для формирования вектора  индикаторов из упомянутого набора индикаторов; и
индикаторов из упомянутого набора индикаторов; и
- используют средство (5) процессора для построения упомянутого вектора z аномалий посредством повторного нормирования упомянутого вектора  индикаторов с использованием следующей формулы:
индикаторов с использованием следующей формулы:
где µ - среднее значение векторов индикаторов, а ∑-1/2 - корень квадратный псевдоинверсного сигнала ∑-1 ковариационной матрицы ∑.
7. Способ по п.6, отличающийся тем, что он включает в себя следующие этапы, на которых:
- используют средство (5) процессора для расчета нормы упомянутого вектора аномалий с использованием расстояния Махаланобиса:
 ; и
; и
- используют средство (5) процессора для обнаружения аномалии упомянутого авиационного двигателя с использованием порога запускающего сигнала, определенного в качестве функции статистического распределения упомянутой нормы вектора аномалий.
8. Способ по п.1, отличающийся тем, что упомянутый набор базисных векторов построен в соответствии с имитирующим поведением индикаторов в случае аномалий.
9. Способ по п.3, отличающийся тем, что он дополнительно заключается в том, что:
- используют средство (5) процессора для установления сетки решений при применении критериев, установленных экспертами;
- используют средство (5) процессора для применения правил Байеса для выведения покомпонентных вероятностей отказа из упомянутых апостериорных вероятностей возникновения и из упомянутой сетки решений; и
- используют средство (5) процессора для обнаружения неисправных физических компонентов, которые ответственны за упомянутые отказы, при применении упомянутых покомпонентных вероятностей отказа.
10. Способ по п.9, отличающийся тем, что упомянутая сетка решений формируется из матрицы условных вероятностей, что компонент неисправен, зная, что отказ был замечен, и из последовательности коэффициентов, соответствующих априорным вероятностям отказа каждого компонента.
11. Способ по п.9, отличающийся тем, что упомянутая сетка решений дополняется машинным обучением.
12. Система для идентификации отказов в авиационном двигателе (1), система отличается тем, что она содержит:
- датчики (3a-3f) для сбора измерений временного ряда с упомянутого авиационного двигателя (1) и его окружающей среды;
- средство (5) для расчета, из упомянутых измерений временного ряда, индикаторов, которые характерны для элементов упомянутого авиационного двигателя (1);
- средство (5) для использования упомянутых характерных индикаторов для определения набора нормализованных индикаторов, представляющих работу упомянутого авиационного двигателя (1);
- средство (5) для построения вектора аномалий, представляющего поведение упомянутого двигателя (1) в качестве функции упомянутого набора нормализованных индикаторов;
- средство (5) для выбора, в случае аномалии, выявляемой упомянутым вектором аномалий, подмножества базисных векторов, имеющих направления, принадлежащие к определенной окрестности направления упомянутого вектора аномалий, упомянутое подмножество базисных векторов выбирается из набора базисных векторов, ассоциативно связанных с отказами упомянутого авиационного двигателя и определенных с использованием критериев, установленных экспертами;
- средство (5) для идентификации отказов, ассоциативно связанных с упомянутым подмножеством базисных векторов;
и тем, что средство для выбора упомянутого подмножества базисных векторов содержит:
- средство (5) для расчета геодезических расстояний между проекцией упомянутого вектора аномалий и проекциями упомянутых базисных векторов на сфере в пространстве размерности, равной количеству индикаторов из упомянутого набора нормализованных индикаторов минус количество линейных соотношений между упомянутыми индикаторами;
- средство (5) для сравнения упомянутых геодезических расстояний парами;
- средство (5) для классификации базисных векторов в порядке возрастания их геодезических расстояний относительно упомянутого вектора аномалий; и
- средство (5) для формирования упомянутого подмножества базисных векторов из первых базисных векторов, имеющих порядок классификации, меньший, чем определенный ранг.
13. Система по п.12, отличающаяся тем, что она включает в себя:
- средство (5) для определения, для каждого базисного вектора, априорной вероятности возникновения при применении критериев, установленных экспертами; и
- средство (5) для расчета, для каждого базисного вектора, апостериорной вероятности возникновения в качестве функции упомянутой априорной вероятности возникновения и упомянутых геодезических расстояний.
14. Система по п.12, отличающаяся тем, что она дополнительно включает в себя:
- средство (5) для установления сетки решений при применении критериев, установленных экспертами;
- средство (5) для использования правил Байеса для выведения покомпонентных вероятностей отказа из апостериорных вероятностей возникновения и из упомянутой сетки решений; и
- средство (5) для обнаружения неисправных физических компонентов, которые ответственны за упомянутые отказы, согласно упомянутым покомпонентным вероятностям отказа.
15. Носитель данных, читаемый компьютером и включающий в себя команды компьютерной программы для реализации способа идентификации отказов по п.1, когда выполняется средством процессора.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 6480780 B1, 12.11.2002 | |||
| US 6539783 B1, 01.04.2003 | |||
| US 7400943 B2, 15.07.2008 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ УСКОРЕННЫХ ИСПЫТАНИЙ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1990 |
|
RU2009460C1 |

