Изобретение относится к области измерительной лазерной техники и может быть использовано для воспроизведения объемных изображений сцены, определения геометрических параметров трехмерных объектов и их расположения.
Наиболее близким из известных по своей технической сущности и достигаемому результату является выбранный в качестве прототипа способ, реализованный в устройстве для контроля геометрии трехмерных объектов и описанный в патенте WO 99/17076. Способ заключается в формировании с помощью анизотропного источника света на измеряемой поверхности контрастной линии, регистрации этой линии неподвижным фоторегистрирующим устройством и определении рельефа поверхности в плоскости луча по степени искривления линии с помощью цифрового вычислительного устройства, вход которого соединен с выходом фоторегистрирующего устройства. При этом с целью измерения всей поверхности осуществляется непрерывный поворот плоского луча относительно измеряемого объекта с одновременным измерением угла поворота.
Недостатком данного способа является необходимость измерения угла поворота луча и наличие механических движущихся частей, а также проблема получения достоверной информации при сильной внешней фоновой засветке.
Аналогом является способ бесконтактного измерения трехмерных объектов, описанный в патенте 2007127463/28. Указанный способ бесконтактного измерения трехмерных объектов заключается в проецировании с помощью анизотропного источника света на измеряемую поверхность яркой контрастной линии, регистрации ее с помощью цифрового фоторегистрирующего устройства, передаче изображения этой линии на вычислительное устройство, определении вычислительным устройством рельефа измеряемой поверхности в плоскости луча по величине искривления линии.
При этом линия подсветки неподвижна относительно фоторегистрирующего устройства, а сканирование его по всем сечениям измеряемой поверхности осуществляют ручным перемещением фоторегистрирующего устройства (совместно с лучом). Также предусматриваются опорные линии, нанесенные на базовую панель, неподвижную относительно измеряемого объекта, изображения которых фиксируются фоторегистрирующим устройством совместно с линиями сечений и передаются на вычислительное устройство, которое по анализу расположения опорных линий совмещает все измеренные сечения в единую поверхность.
Недостатками рассмотренного способа являются ручное перемещение сканирующего устройства и проблема получения достоверной информации при сильной фоновой засветке.
Основной решаемой задачей изобретения является разработка простого и надежного способа получения трехмерной модели портрета сцены, исключающего наличие движущихся деталей и работающего при любой фоновой освещенности.
Устройство, реализующее способ электронного сканирования пространства, состоит из нескольких лазерных генераторов линий, матричного фоторегистрирующего устройства, спектрального фильтра и вычислительного устройства. Лазерные генераторы линий расположены под известными жестко фиксированными углами относительно друг друга и относительно фоторегистрирующего устройства таким образом, чтобы перекрывать всю зону обзора фоторегистрирующего устройства, что позволяет избавиться от механически движущихся деталей.
Блок источников лазерного излучения и фоторегистрирующее устройство жестко зафиксированы и располагаются таким образом, что их поля зрения максимально перекрываются, а оптические оси лежат в одной плоскости и либо параллельны, либо пересекаются в дальней зоне. В идеальном случае они пересекаются в центре рабочего диапазона дальностей, при этом расстояние между оптическими центрами блока и устройства, так же как и углы наклона осей в выбранной системе координат, определяются в процессе калибровки прибора.
Спектральный фильтр, в полосу пропускания которого попадает излучение лазерных генераторов линий, служит для уменьшения чувствительности прибора к фоновой засветке и расположен непосредственно перед объективом фоторегистрирующего устройства.
Сущность заявляемого изобретения заключается в проецировании структурированной лазерной подсветки на сканируемую область (фиг.1), регистрации ее проекции через спектральный фильтр матричным фоторегистрирующим устройством, синхронизированным с блоком структурированной лазерной подсветки таким образом, что каждый нечетный кадр снимается без подсветки, а каждый четный - с подсветкой одной или несколькими линиями. Далее полученные кадры передаются на вычислительное устройство, которое вычитает из каждого четного кадра предыдущий нечетный кадр.
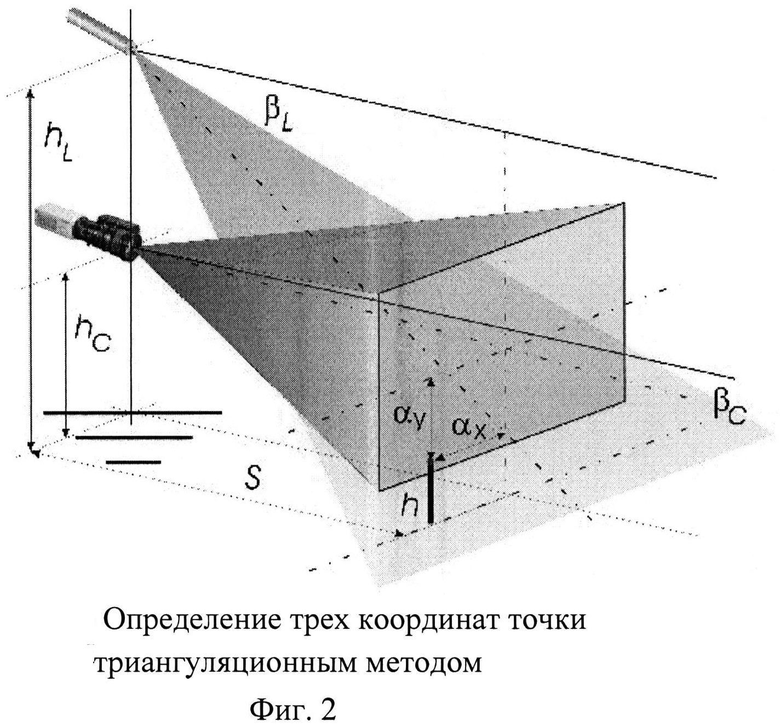
Затем производится определение трех координат каждой точки линий подсветки относительно выбранной системы координат. Например, использование триангуляционного метода в системе координат, представленной на фиг.2, для выбранной точки на подсвеченной линии осуществляется по следующим формулам:
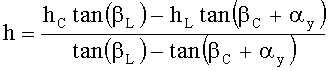
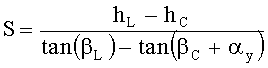
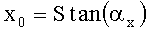
По полученным координатам восстанавливается трехмерный портрет сцены, при этом разрешение в направлении линии подсветки определяется разрешением фоторегистрирующего устройства, а в ортогональном направлении - количеством используемых лазерных генераторов линий. Работа в реальном времени может быть обеспечена за счет применения высокоскоростных матричных фоторегистрирующих устройств.
Работа системы в широком диапазоне освещенностей достигается тремя этапами фильтрации: использованием спектрального фильтра, осуществляющим спектральную селекцию и снижающим интенсивность спектральной засветки, открытием затвора фоторегистрирующего устройства только на время включения подсветки, что обеспечивает временную селекцию, и вычитанием кадра без подсветки из кадра с подсветкой (дифференцирование фона).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕПЛОВИЗИОННОГО РАСПОЗНАВАНИЯ ФОРМЫ ОБЪЕКТОВ | 2010 |
|
RU2431936C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2007 |
|
RU2365876C2 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ И РАСПОЗНАВАНИЯ ПОВЕРХНОСТЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199718C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ И/ИЛИ ДЕФОРМАЦИЙ ОБРАЗЦА ПРИ ВЫСОКОТЕМПЕРАТУРНОМ ВОЗДЕЙСТВИИ НА НЕГО И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2665323C1 |
| СПОСОБ ЛАЗЕРНОГО ВИДЕОИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ | 2007 |
|
RU2338998C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ТРЕХМЕРНОЙ ФОРМЫ ОБЪЕКТОВ | 2012 |
|
RU2491503C1 |
| Устройство онлайн-мониторинга формы наплавленного слоя и управления процессом прямого лазерного выращивания изделий из металлических порошков | 2022 |
|
RU2811830C2 |
| УСТРОЙСТВО ТРЕХМЕРНОГО СКАНИРОВАНИЯ СЦЕНЫ С НЕЛАМБЕРТОВЫМИ ЭФФЕКТАМИ ОСВЕЩЕНИЯ | 2014 |
|
RU2573767C1 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2185599C1 |
| Способ и устройство для измерения трёхмерных координат поверхности объекта | 2023 |
|
RU2812008C1 |
Изобретение относится к области измерительной лазерной техники. Способ электронного сканирования пространства для получения трехмерной модели портрета сцены заключается в проецировании структурированной лазерной подсветки, формируемой с помощью нескольких лазерных генераторов линий, расположенных под фиксированными углами относительно друг друга, регистрации ее с помощью матричного фоторегистрирующего устройства, последовательно снимающего кадры с подсветкой и без подсветки для последующего дифференцирования фона, передаче изображения линий подсветки на вычислительное устройство и определении вычислительным устройством объемного изображения сцены триангуляционным методом. При этом сканирование осуществляется последовательным поочередным включением одной или нескольких линий структурированной лазерной подсветки. 2 ил.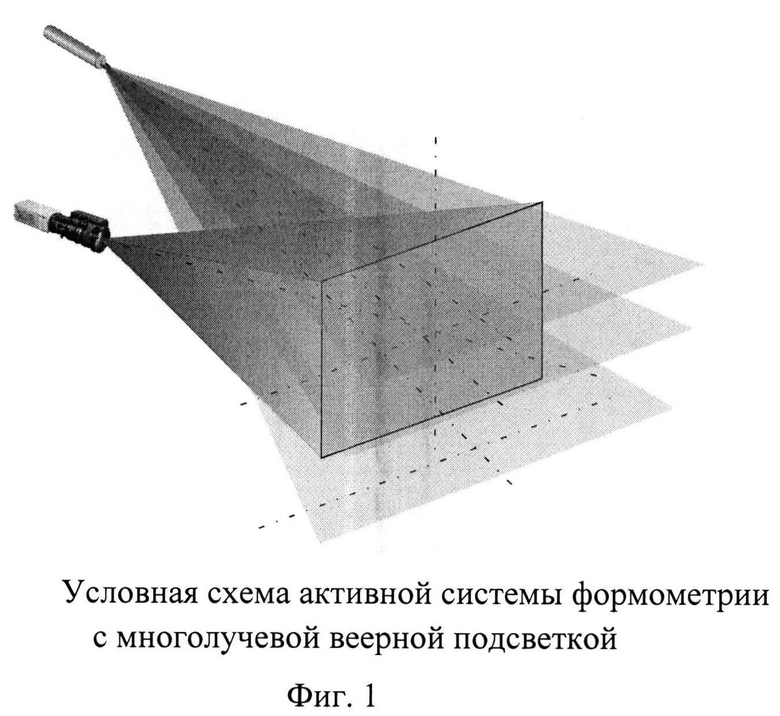
Способ электронного сканирования пространства для получения трехмерной модели портрета сцены, заключающийся в проецировании структурированной лазерной подсветки, формируемой с помощью нескольких лазерных генераторов линий, расположенных под фиксированными углами относительно друг друга, регистрации ее с помощью матричного фоторегистрирующего устройства, последовательно снимающего кадры с подсветкой и без подсветки для последующего дифференцирования фона, передаче изображения линий подсветки на вычислительное устройство и определении вычислительным устройством объемного изображения сцены триангуляционным методом, при том что сканирование осуществляется последовательным поочередным включением одной или нескольких линий структурированной лазерной подсветки.
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2007 |
|
RU2365876C2 |
| US 7787105 B2, 31.08.2010, | |||
| WO 1987002797 A1, 07.05.1987, | |||
| WO 2010141982 A9, 16.12.2010, | |||
| US 20050278098 A1, 15.12.2005 | |||

