Уровень техники
Уже был предложен модуль крепления рабочего инструмента ручной машины, соединяемый с базовым модулем ручной машины и содержащий по меньшей мере одну основную часть и по меньшей мере один расположенный в пазу основной части стопорный элемент, предусмотренный для геометрического замыкания с базовым модулем ручной машины с целью присоединения к последнему.
Раскрытие изобретения
Объектом изобретения является модуль крепления рабочего инструмента ручной машины, соединяемый с базовым модулем ручной машины и содержащий по меньшей мере одну основную часть и по меньшей мере один расположенный в пазу основной части стопорный элемент, предусмотренный для геометрического замыкания с базовым модулем ручной машины с целью присоединения к последнему.
Предлагаемый в изобретении модуль крепления рабочего инструмента ручной машины содержит по меньшей мере одно зажимное устройство, которое по меньшей мере в предварительно смонтированном состоянии модуля крепления рабочего инструмента фиксирует по меньшей мере один стопорный элемент в пазу основной части. При этом под базовым модулем ручной машины понимается, в частности, предварительно собираемый узел ручной машины, содержащий такие компоненты ручной машины, как ударное устройство, передаточный механизм и/или двигательный узел. Под ударным устройством понимается, в частности, устройство, предусмотренное для создания ударных импульсов, передаваемых установленному в держателе рабочему инструменту, например для обеспечения работы ручной машины в режиме долбления или ударного сверления, причем ударный механизм предусмотрен для преобразования вращательного движения в линейное движение удара (ударное движение). При этом ударный механизм предпочтительно содержит поршень, который за счет своего осевого движения создает внутри ствола (цилиндра) ударного механизма импульс давления, воспринимаемый бойком и далее передаваемый закрепленному в держателе рабочему инструменту. При этом под стволом понимается, в частности, часть ударного устройства, в которой расположен по меньшей мере один боек ударного устройства, установленный с возможностью линейного перемещения в направлении действия ударного механизма. Под ручной машиной понимается, в частности, машина для обработки заготовок (обрабатываемых объектов), но преимущественно дрель или перфоратор и/или отбойный молоток. При этом под модулем крепления рабочего инструмента ручной машины понимается, в частности, модуль, предусмотренный для установки в нем рабочего инструмента и для этого содержащий соответственно выполненные фиксирующие узлы. Модуль крепления рабочего инструмента ручной машины предпочтительно выполнен в виде комбинированного модуля для установки рабочих инструментов с профилированным хвостовиком, таким как SDS-хвостовик, и для установки обычных рабочих инструментов, например инструментов с цилиндрическим хвостовиком. В принципе же модуль крепления рабочего инструмента ручной машины может быть выполнен и в виде модуля SDS, предусмотренного только для установки рабочих инструментов с SDS-хвостовиком. При этом под фиксирующим узлом понимается, в частности, узел, предусмотренный для фиксации рабочего инструмента в держателе последнего, причем фиксирующий узел может быть выполнен в виде фиксирующего узла с зажимными кулачками, перемещаемыми оператором путем воздействия на зажимную втулку, или в виде фиксирующего узла, огранивающего осевое движение рабочего инструмента с SDS-хвостовиком, т.е. допускающего ограниченное перемещение такого рабочего инструмента. Под рабочим инструментом понимается, в частности, инструмент, предусмотренный для обработки заготовки и/или обрабатываемого материала. В частности, рабочий инструмент может быть выполнен в виде инструмента вращательного и/или ударного действия, предпочтительно в виде сверла и/или долота. Предпочтительно, чтобы рабочий инструмент имел по меньшей мере один соединительный участок, вставляемый в держатель рабочего инструмента и предпочтительно выполненный цилиндрическим. В частности, соединительный участок имеет длину, по меньшей мере вдвое бóльшую, в частности по меньшей мере втрое бóльшую, предпочтительно - по меньшей мере впятеро бóльшую, диаметра цилиндрического соединительного участка. При этом под рабочим инструментом с SDS-хвостовиком понимается, в частности, рабочий инструмент, выполненный, в частности, для работы в ударном режиме (долбление) и/или в ударно-вращательном режиме (ударное сверление), и для этого имеющий в своем хвостовике специальное углубление, которое, в частности, также предусмотрено для ограничения осевого движения рабочего инструмента с SDS-хвостовиком. Под стопорным элементом в этой связи понимается, в частности, элемент, который за счет геометрического замыкания с каждым из двух других элементов, соединяет эти два других элемента друг с другом. При этом стопорный элемент предпочтительно выполнен в виде штифта или шарика. Слово "предусмотренный" следует понимать, в частности, как установленный, выполненный и/или оснащенный специально для выполнения определенной функции. Под тем, что некоторый объект предусмотрен для осуществления определенной функции, понимается, в частности, то, что этот объект реализует и/или выполняет эту определенную функцию по меньшей мере в одном эксплуатационном и/или рабочем состоянии. Под предварительно смонтированным состоянием модуля крепления рабочего инструмента ручной машины понимается, в частности, рабочее состояние, в котором модуль крепления рабочего инструмента сам по себе полностью собран и для полного укомплектования ручной машины должен лишь быть соединен с ее базовым модулем. Под зажимным устройством понимается, в частности, устройство, которое за счет приложения усилия, предпочтительно - приложения усилия упругим звеном, зажимает один элемент, в частности стопорный элемент, в другом элементе. При этом под фиксацией понимается, в частности, установка элемента нетеряемым образом, т.е. то, что зафиксированный элемент предохранен от непреднамеренного отсоединения. Особое преимущество изобретения заключается в том, что оно позволяет предварительно смонтировать модуль крепления рабочего инструмента ручной машины и хранить его в этом состоянии, не используя дополнительных фиксирующих приспособлений. При этом, в частности, благодаря предлагаемому в изобретении выполнению модуля крепления рабочего инструмента, стопорные элементы, предусмотренные для соединения с базовым модулем ручной машины, могут быть зафиксированы в модуле крепления рабочего инструмента ручной машины особенно просто и эффективно, в частности, без применения дополнительных элементов. Это делает особенно удобным временное хранение модуля крепления рабочего инструмента ручной машины в предварительно смонтированном состоянии и позволяет в заданный момент времени быстро и просто установить его на базовый модуль ручной машины.
Также предлагается вариант осуществления изобретения, в котором зажимное устройство предусмотрено для фиксации по меньшей мере одного стопорного элемента в смонтированном состоянии модуля крепления рабочего инструмента, в котором модуль крепления рабочего инструмента за счет геометрического замыкания соединен с базовым модулем ручной машины. Благодаря этому при нахождении модуля крепления рабочего инструмента в полностью смонтированном, т.е. полностью установленном на базовом модуле, состоянии по меньшей мере один стопорный элемент может быть особенно просто и надежно зафиксирован, в частности без применения дополнительных деталей. Преимуществом этого варианта является реализация зажимного устройства с двойным назначением.
Далее предлагается вариант осуществления изобретения, в котором зажимное устройство содержит по меньшей мере один промежуточный элемент и упругое звено, причем стопорный элемент для его фиксации зажат посредством упругого звена и промежуточного элемента. Под упругим звеном понимается, в частности, узел, содержащий по меньшей мере один упругий элемент. В предпочтительном исполнении упругое звено образовано одним упругим элементом. В частности, упругое звено может содержать несколько упругих элементов, включенных параллельно и/или последовательно. Предпочтительно, чтобы упругие элементы действовали совместно и создавали эффективное зажимное усилие между двумя концевыми областями упругого звена. Под упругим элементом понимается, в частности, макроскопический элемент, имеющий по меньшей мере одну протяженность (измерение), которая в нормальном рабочем состоянии упруго, или обратимо, изменяется по меньшей мере на 10%, в частности по меньшей мере на 20%, предпочтительно - по меньшей мере на 30% и особенно предпочтительно - по меньшей мере на 50%, и создающий противодействующую изменению протяженности силу реакции, в частности зависящую от изменения протяженности и предпочтительно пропорциональную этому изменению. Этот вариант осуществления изобретения позволяет особенно просто и качественно фиксировать по меньшей мере один стопорный элемент в соответствующем пазу.
Кроме того, предлагается вариант осуществления изобретения, в котором промежуточный элемент имеет удерживающий участок, ориентированный по существу перпендикулярно по меньшей мере одному стопорному элементу и контактирующий со стопорным элементом при нахождении последнего в зажатом в основной части состоянии. При этом под ориентацией удерживающего участка по существу перпендикулярно стопорному элементу понимается, в частности, то, что в точке соприкосновения и/или на участке поверхности соприкосновения, в которой или, соответственно, на котором удерживающий участок промежуточного элемента находится в контакте со стопорным элементом, вектор нормали к поверхности удерживающего участка проходит под углом, составляющим по меньшей мере 85°, предпочтительно - под углом, составляющим по меньшей мере 89°, к поверхности стопорного элемента, и в особенно предпочтительном исполнении - ортогонально поверхности стопорного элемента. При этом под контактированием понимается то, что соответствующие элементы находятся в непосредственном контакте и соприкасаются с возможностью передачи усилия между соответствующими элементами, в данном случае - между удерживающим участком промежуточного элемента и стопорным элементом. Такое выполнение промежуточного элемента позволяет прикладывать к стопорному элементу через промежуточный элемент усилие, действующее перпендикулярно главной протяженности стопорного элемента, что позволяет исключить приложение к стопорному элементу усилия, действующего в радиальном направлении и способного выдавить стопорный элемент из паза.
Также предлагается вариант осуществления изобретения, в котором промежуточный элемент имеет по меньшей мере один упор, который фиксирует по меньшей мере один стопорный элемент, находящийся в зажатом в основной части состоянии, в радиальном направлении снаружи. При этом под фиксацией в радиальном направлении снаружи понимается, в частности, то, что упор препятствует перемещению по меньшей мере одного стопорного элемента наружу в радиальном направлении. Такое выполнение промежуточного элемента позволяет особенно надежно застраховать по меньшей мере один стопорный элемент от выпадения из предварительно смонтированного модуля крепления рабочего инструмента.
Далее предлагается вариант осуществления изобретения, в котором промежуточный элемент имеет по меньшей мере один конический участок, предусмотренный для того, чтобы по меньшей мере в одном состоянии монтажа преобразовывать силу упругости упругого звена в силу поджатия, действующую в радиальном направлении по меньшей мере на один стопорный элемент. При этом под коническим участком понимается, в частности, участок промежуточного элемента, имеющий коническую форму. Это позволяет создать скос, которым промежуточный элемент давит на стопорный элемент, создавая как составляющую силы, действующую на стопорный элемент в радиальном направлении, так и составляющую силы, действующую на стопорный элемент в осевом направлении. Благодаря этой радиальной силе поджатия стопорный элемент можно фиксировать во время монтажа, что, в частности, облегчает монтаж.
Вышеупомянутый конический участок промежуточного элемента может быть расположен под углом от 15° до 75° к удерживающему участку. Это означает, что угол между коническим и удерживающим участками может принимать значение в интервале между крайними значениями 15° и 75°, причем в предпочтительном случае этот угол находится в интервале от 30° до 60°, а в особенно предпочтительном случае - составляет 45°. При таком выполнении промежуточного элемента конический участок выполнен особенно подходящим для того, чтобы прикладывать по меньшей мере к одному стопорному элементу силу поджатия.
Далее предлагается вариант осуществления изобретения, в котором модуль крепления рабочего инструмента ручной машины содержит по меньшей мере один корпусной элемент, который в предварительно смонтированном (собранном) состоянии модуля крепления рабочего инструмента перекрывает радиально снаружи по меньшей мере один стопорный элемент. Под корпусным элементом понимается, в частности, элемент, которым модуль крепления рабочего инструмента закрыт снаружи, причем в предпочтительном исполнении корпусной элемент выполнен в виде управляющей втулки, установленной с возможностью осевого перемещения. При этом под радиальным перекрытием стопорного элемента понимается, в частности, то, что корпусной элемент простирается в радиальном направлении по меньшей мере до области, находящейся снаружи от стопорных элементов, т.е. охватывает стопорные элементы. Такое выполнение модуля крепления рабочего инструмента позволяет, при его нахождении в предварительно смонтированном состоянии, особенно надежно защитить по меньшей мере один стопорный элемент, в частности также при транспортировке и хранении модуля крепления рабочего инструмента.
Далее предлагается вариант осуществления изобретения, в котором в полностью смонтированном состоянии модуля крепления рабочего инструмента по меньшей мере один стопорный элемент выступает радиально наружу за пределы паза, в котором стопорный элемент расположен. Это позволяет при демонтаже модуля крепления рабочего инструмента особенно просто захватить по меньшей мере один стопорный элемент и демонтировать его.
Объектом изобретения является также ручная машина, имеющая базовый модуль и предлагаемый в изобретении модуль крепления рабочего инструмента и поэтому обладающая рассмотренными выше преимуществами.
При этом базовый модуль может содержать по меньшей мере один основной приводной элемент, в котором соответственно по меньшей мере одному стопорному элементу выполнен по меньшей мере один паз, в который стопорный элемент входит в полностью смонтированном, т.е. полностью установленном на базовом модуле, состоянии модуля крепления рабочего инструмента. При этом под основным приводным элементом понимается, в частности, элемент, предусмотренный в ручной машине по меньшей мере для передачи крутящего момента. Основной приводной элемент предпочтительно выполнен в виде ствола (цилиндра). В принципе же основной приводной элемент может быть выполнен и в виде шпинделя ручной машины. В этом варианте осуществления изобретения модуль крепления рабочего инструмента может быть соединен с базовым модулем ручной машины посредством по меньшей мере одного стопорного элемента особенно простым и недорогим образом.
При этом по меньшей мере один паз в основном приводном элементе может образовывать по меньшей мере один ограничитель, поддерживающий стопорный элемент изнутри в радиальном направлении. Под ограничителем понимается, в частности, выступ, который прилегает к элементу, в частности к по меньшей мере одному стопорному элементу, для ограничения перемещения этого элемента в определенном направлении перемещения. Это позволяет эффективно зафиксировать стопорный элемент в пазу основного приводного элемента и в частности воспрепятствовать выскальзыванию стопорного элемента внутрь основного приводного элемента.
При этом предлагаемый в изобретении модуль крепления рабочего инструмента ручной машины не ограничивается рассмотренными в описании применением изобретения и вариантом его осуществления. В частности, предлагаемый в изобретении модуль крепления рабочего инструмента ручной машины для реализации описанного принципа работы может иметь число отдельных элементов, деталей и узлов, отличное от указанных в описании.
Краткое описание чертежей
Другие преимущества изобретения выявляются в нижеследующем описании его осуществления, поясняемом чертежами. На чертежах в качестве примера представлены четыре варианта осуществления изобретения. На чертежах, в описании и в формуле изобретения многочисленные признаки содержатся в определенной комбинации. Исходя из целесообразности, специалист сможет также рассматривать эти признаки в отдельности и объединять их в другие рациональные комбинации. На чертежах показано:
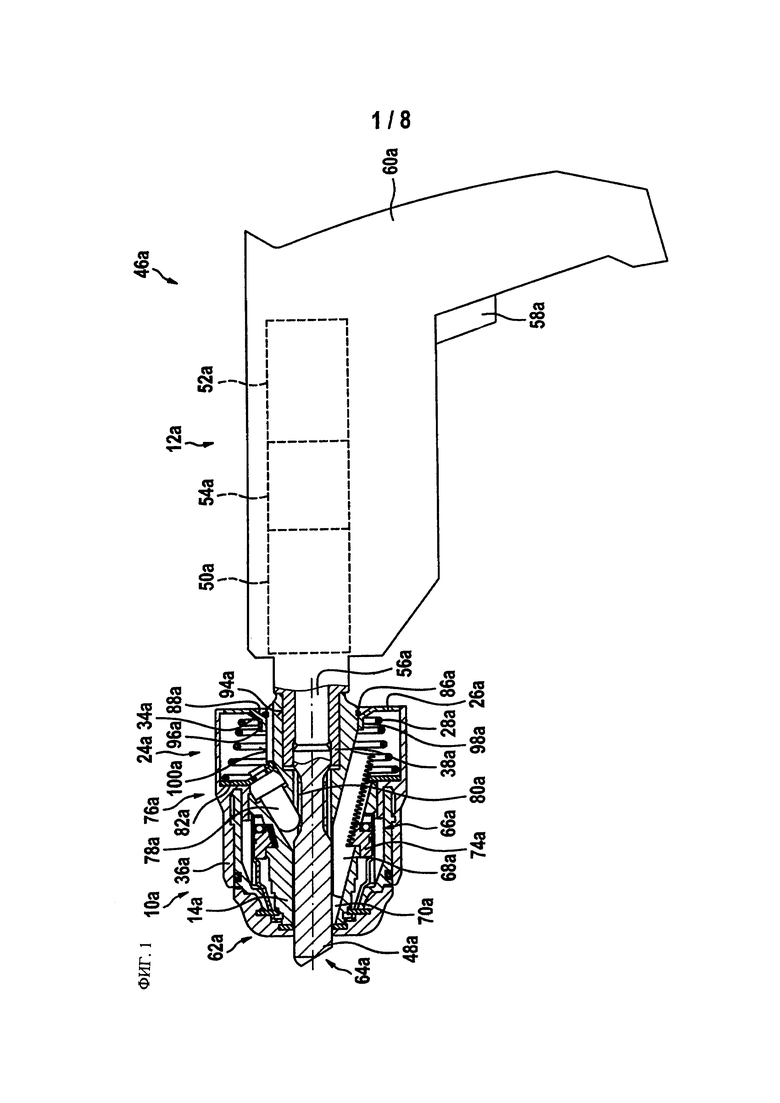
на фиг. 1 - схематически предлагаемая в изобретении ручная машина с предлагаемым в изобретении модулем крепления ее рабочего инструмента в разрезе,
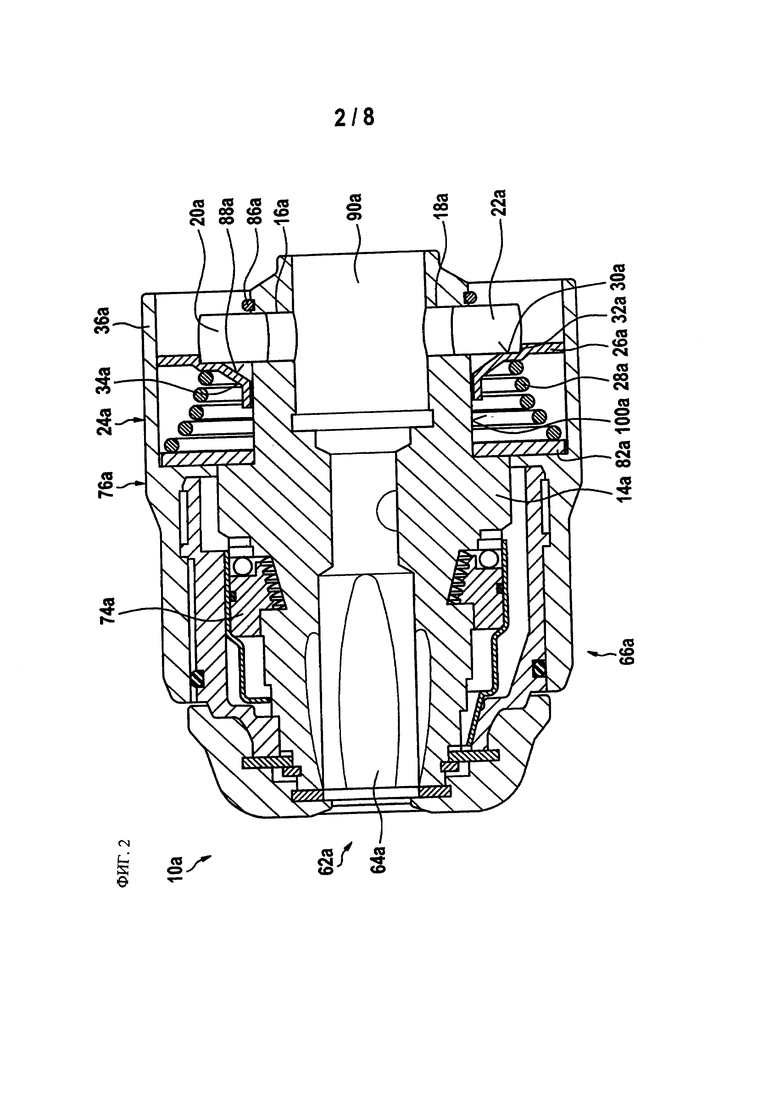
на фиг. 2 - схематически в разрезе предлагаемый в изобретении модуль крепления рабочего инструмента ручной машины в первом варианте осуществления изобретения,
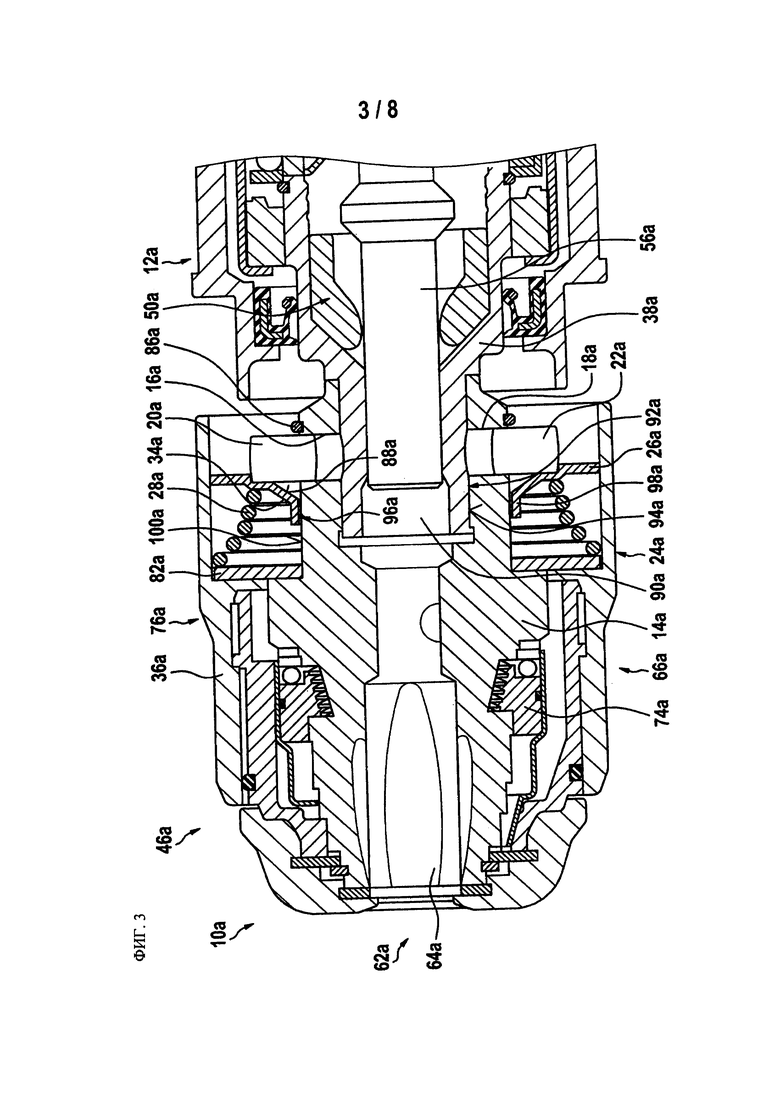
на фиг. 3 - схематически в разрезе модуль крепления рабочего инструмента и базовый модуль ручной машины в процессе их сборки,
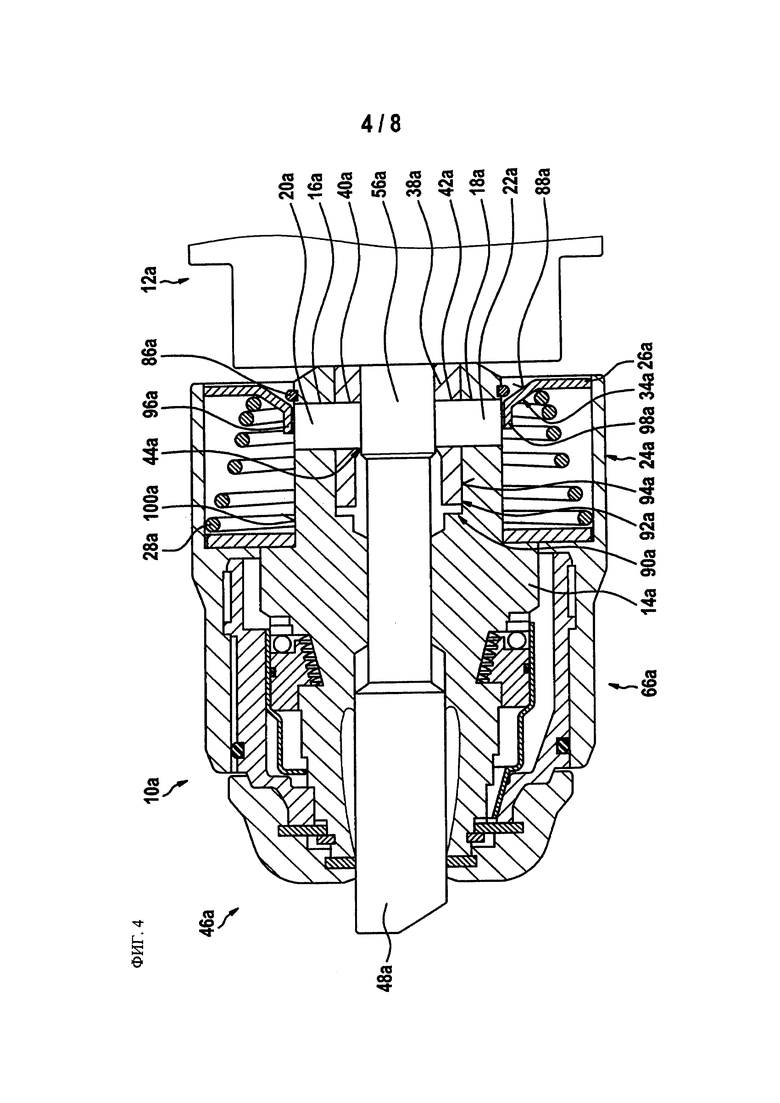
на фиг. 4 - схематическое изображение в разрезе, на котором модуль крепления рабочего инструмента полностью смонтирован на базовом модуле ручной машины,
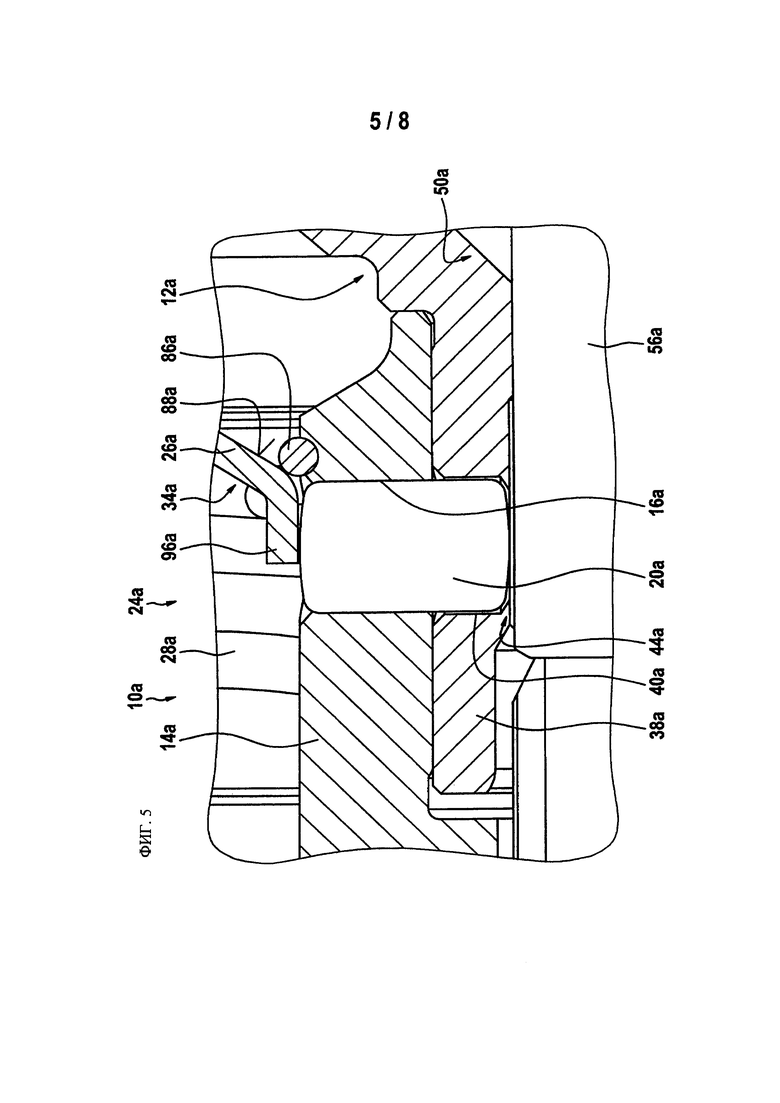
на фиг. 5 - местный вид в разрезе стопорного элемента в полностью смонтированном состоянии модуля крепления рабочего инструмента,
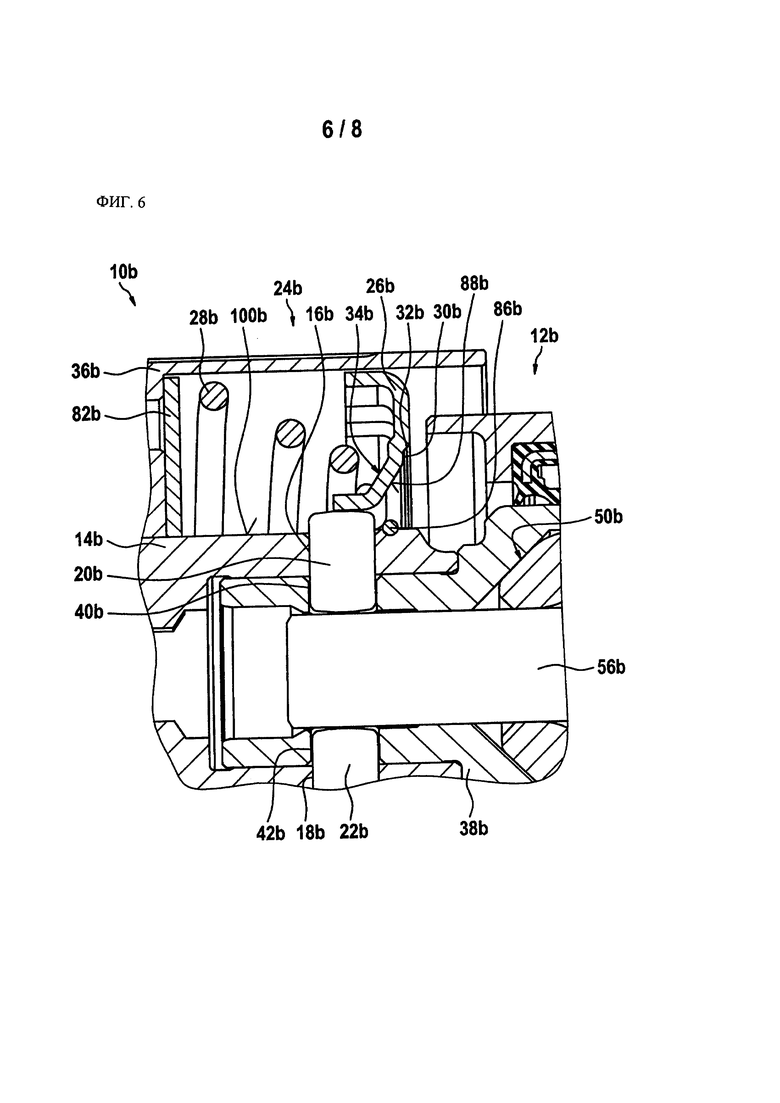
на фиг. 6 - местный вид в разрезе стопорного элемента предлагаемого в изобретении модуля крепления рабочего инструмента во втором варианте осуществления изобретения,
на фиг. 7 - схематическое изображение в разрезе предлагаемой в изобретении ручной машины с предлагаемым в изобретении модулем крепления рабочего инструмента в третьем варианте осуществления изобретения и базовым модулем ручной машины и
на фиг. 8 - схематическое изображение в разрезе предлагаемого в изобретении модуля крепления рабочего инструмента в четвертом варианте осуществления изобретения.
Осуществление изобретения
На фиг. 1-5 показан первый вариант выполнения предлагаемого в изобретении модуля 10а крепления рабочего инструмента ручной машины. На фиг. 1 показано схематическое изображение предлагаемой в изобретении ручной машины 46а с предлагаемым в изобретении модулем 10а крепления ее рабочего инструмента. Ручная машина 46а содержит базовый модуль 12а. При этом на фиг. 1 модуль 10а крепления рабочего инструмента для наглядности деталей его конструкции изображен в несколько большем масштабе по сравнению с базовым модулем 12а ручной машины. Ручная машина 46а выполнена в виде перфоратора. На фиг. 2 в разрезе показан первый вариант выполнения предлагаемого в изобретении модуля 10а крепления рабочего инструмента. Модуль 10а крепления рабочего инструмента выполнен в виде комбинированного модуля крепления рабочего инструмента, предназначенного для присоединения к ручной машине 46а рабочих инструментов 48а с SDS-хвостовиком и обычных рабочих инструментов 48а с нормальными (цилиндрическими) хвостовиками. Базовый модуль 12а ручной машины содержит ударное устройство 50а, двигательный узел 52а и передаточный механизм 54а. При этом передаточный механизм 54а содержит переключатель (не чертежах не показан), предусмотренный для переключения режимов работы между вращательным, ударным и ударно-вращательным. Развиваемый двигательным узлом 52а крутящий момент преобразуется передаточным механизмом 54а в выходную мощность в установленном оператором режиме и передается на ведомый узел, включающий в себя ударное устройство 50а. Посредством ударного устройства 50а создается и передается рабочему инструменту 48а ударный импульс. При этом ударное устройство 50а содержит боек 56а, приводимый в движение импульсом давления, создаваемым не показанным на чертежах поршнем, и передающий этот импульс давления на рабочий инструмент 48а. Ударное устройство 50а также содержит основной приводной элемент 38а, в котором с возможностью осевого перемещения установлен боек 56а. Основной приводной элемент 38а выполнен в виде ствола. При этом выполненный в виде ствола основной приводной элемент 38а ограничивает радиально снаружи камеру сжатия, вследствие чего в основном приводном элементе 38а посредством поршня может создаваться импульс давления. В принципе ударный механизм также может содержать полый поршень или может иметь другое подходящее с точки зрения специалиста исполнение, и в этом случае ударный механизм и боек будут выполнены соответственно. Основной приводной элемент 38а приводится во вращение посредством двигательного узла 52а и передаточного механизма 54а. Базовый модуль 12а ручной машины содержит и другие элементы, такие как электронные компоненты, блок управления и регулирования для управления двигательным узлом 52а, орган 58а управления для включения и выключения ручной машины 46а оператором и/или орган управления для выбора режима работы. В принципе базовый модуль 12а ручной машины может иметь дополнительные и/или иные элементы. Базовый модуль 12а ручной машины имеет две корпусные полуоболочки 60а, которые ограничивают базовый модуль 12а ручной машины снаружи и в/на которых расположены другие элементы базового модуля 12а ручной машины. В принципе базовый модуль 12а ручной машины также может иметь иначе выполненные корпусные элементы, ограничивающие снаружи ручную машину 46а. Также базовый модуль 12а ручной машины может состоять из нескольких предварительно собираемых субмодулей, соединяемых при сборке в базовый модуль 12а ручной машины.
Ручная машина 46а имеет модуль 10а крепления ее рабочего инструмента. Модуль 10а крепления рабочего инструмента предусмотрен для крепления рабочего инструмента 48а к ручной машине 46а. Для этого модуль 10а крепления рабочего инструмента содержит держатель 62а рабочего инструмента. Держатель 62а рабочего инструмента предусмотрен для размещения в нем рабочего инструмента 48а. Держатель 62а рабочего инструмента имеет основную часть 14а, предусмотренную для приема рабочего инструмента 48а, который может быть выполнен в виде сверла и/или долота. При этом рабочий инструмент 48а может быть выполнен с SDS-хвостовиком. Основная часть 14а имеет выемку 64а, которая открыта со стороны переднего конца ручной машины 46а и через которую рабочий инструмент 48а вставляется в держатель 62а рабочего инструмента. Основная часть 14а выполнена в виде центральной части патрона.
Модуль 10а крепления рабочего инструмента содержит первый фиксирующий узел 66а. Первый фиксирующий узел 66а модуль 10а крепления рабочего инструмента предусмотрен для фиксации обычного рабочего инструмента 48а с круглым хвостовиком. В принципе, устанавливаемый в этом фиксирующем модуле рабочий инструмент 48а также может иметь иной, например шестигранный, хвостовик. Первый фиксирующий узел 66а содержит три зажимных кулачка 68а, установленных с возможностью бесступенчатого перемещения и предусмотренных для крепления рабочего инструмента 48а с силовым замыканием в направлении обработки. Первый фиксирующий узел 66а имеет приемную область, ограниченную тремя зажимными кулачками 68а. Зажимные кулачки 68а первого фиксирующего узла 66а подвижно установлены в основной части 14а. Для установки зажимных кулачков 68а основная часть 14а имеет наклонно ориентированные выемки 70а, в каждой из которых установлен с возможностью осевого перемещения один из зажимных кулачков 68а. Каждый зажимной кулачок 68а первого фиксирующего узла 66а может перемещаться вдоль оси своего перемещения, проходящей с наклоном к оси движения. При этом зажимные кулачки 68а установлены вдоль осей перемещения, каждая из которых образует с осью движения угол примерно 15°. При этом оси перемещения сходятся в направлении переднего конца ручной машины 46а. Благодаря этому зажимные кулачки 68а первого фиксирующего узла 66а перемещаются друг к другу в направлении смыкания, проходящем в сторону переднего конца ручной машины 46а, таким образом зажимая рабочий инструмент 48а, вставленный в держатель 62а. Для обеспечения возможности перемещения зажимных кулачков 68а первого фиксирующего узла 66а каждый зажимной кулачок 68а имеет зубья. Держатель 62а рабочего инструмента содержит корпусной элемент 36а, который окружает радиально снаружи первый фиксирующий узел 66а. При этом корпусной элемент 36а установлен с возможностью поворота относительно основной части 14а. Фиксирующий узел 66а содержит резьбовое кольцо 74а, соединенное с корпусным элементом 36а с фиксацией от проворачивания относительно него. При этом резьбовое кольцо 74а имеет внутренние зубья, находящиеся в зацеплении с зубьями зажимных кулачков 68а. При повороте резьбового кольца 74а вследствие вращения корпусного элемента 36а зажимные кулачки 68а перемещаются, при неподвижной основной части 14а, внутри выемок в основной части 14а вдоль своих осей и таким образом могут смыкаться или раскрываться. Благодаря этому оператор, вращая выполненный в виде зажимной втулки корпусной элемент 36а, может изменять положение зажимных кулачков 68а, т.е. зажимать рабочий инструмент 48а или освобождать его.
Модуль 10а крепления рабочего инструмента содержит второй фиксирующий узел 76а. Второй фиксирующий узел 76а предусмотрен для фиксации рабочего инструмента 48а с SDS-хвостовиком. Второй фиксирующий узел 76а содержит замковый элемент 78а, который в рабочем состоянии со вставленным в модуль рабочим инструментом 48а с SDS-хвостовиком предусмотрен для того, чтобы во взаимодействии с замковым элементом 80а рабочего инструмента 48а с SDS-хвостовиком ограничивать ход рабочего инструмента 48а с SDS-хвостовиком вдоль оси движения. Замковый элемент 78а второго фиксирующего узла имеет запирающее положение, в котором этот замковый элемент 78а входит в замковый элемент 80а рабочего инструмента 48а с SDS-хвостовиком. При этом запирающее положение является исходным положением замкового элемента 78а, занимаемым им в смонтированном состоянии, когда на замковый элемент 78а снаружи не действует никаких сил, например когда в модуль крепления рабочего инструмента не вставлен рабочий инструмент 48а или когда в модуль крепления рабочего инструмента полностью введен рабочий инструмент 48а с SDS-хвостовиком. Замковый элемент 78а выполнен в виде пальца и подвижно установлен в опоре вдоль оси установки. Ось установки образует с осью движения угол 30°. Второй фиксирующий узел 76а содержит соединительный элемент 82а с замковым элементом, в который входит замковый элемент 78а второго фиксирующего узла 76а. На соединительный элемент 82а действует зажимное усилие, которое в рабочем состоянии, в котором замковый элемент 78а второго фиксирующего узла 76а выведен из своего запирающее положения, в частности во время ведения рабочего инструмента 48а с SDS-хвостовиком, действует на замковый элемент 78а фиксирующего узла 76а как сила поджатия. Кроме того, благодаря действующему на соединительный элемент 82а зажимному усилию замковый элемент 78а удерживается в замковом элементе 80а рабочего инструмента 48а с SDS-хвостовиком. Соединительный элемент 82а выполнен в виде кольца, из которого внутрь выступает язычок, расположенный под углом, соответствующим вышеупомянутому углу 30°. Замковый элемент соединительного элемента 82а расположен в области язычка. Для управления вторым фиксирующим узлом 76а модуль 10а крепления рабочего инструмента содержит корпусной элемент 36а. Корпусной элемент 36а выполнен в виде втулки и окружает радиально снаружи второй фиксирующий узел 76а. При этом корпусной элемент 36а проходит от передней части модуля 10а крепления рабочего инструмента, в которой расположен первый фиксирующий узел 66а, до задней части модуля 10а крепления рабочего инструмента, в которой расположен второй фиксирующий узел 76а. Корпусной элемент 36а предусмотрен как для управления первым фиксирующим узлом 66а, так и для управления вторым фиксирующим узлом 76а. Корпусной элемент 36а имеет по существу кольцеобразное поперечное сечение. Корпусной элемент 36а предусмотрен для разблокирования, или освобождения, замкового элемента 78а второго фиксирующего узла 76а. Для этого корпусной элемент 36а соединен с соединительным элементом 82а второго фиксирующего узла 76а. Корпусной элемент 36а имеет на своей радиально внутренней стороне упор, к которому прилегает радиально внешняя часть соединительного элемента 82а. Корпусной элемент 36а установлен на основной части 14 с возможностью перемещения в осевом направлении. Корпусной элемент 36а может смещаться в осевом направлении относительно основной части 14а. При нахождении замкового элемента 78а в запирающем положении корпусной элемент 36а находится в своем несмещенном исходном положении, в которое он поджимается действующим на соединительный элемент 82а зажимным усилием. Корпусной элемент 36а совершает отпирающее движение, т.е. перемещается на отпирание рабочего инструмента, при отведении корпусного элемента из его несмещенного исходного положения в осевом направлении от переднего конца ручной машины 46а против зажимного усилия. В результате этого отпирающего движения корпусного элемента 36а соединительный элемент 82а второго фиксирующего узла 76а увлекается упором корпусного элемента 36а и также сдвигается в осевом направлении. При перемещении соединительного элемента 82а также сдвигается, вдоль своей оси установки, замковый элемент 78а, соединенный с соединительным элементом 82а за счет геометрического замыкания, в результате чего замковый элемент 78а переходит из своего запирающего положения в отпирающее положение, в котором он уже не находится в зацеплении с замковым элементом 80а рабочего инструмента 48а с SDS-хвостовиком, т.е. не взаимодействует с ним. При снятии усилия с корпусного элемента 36а корпусной элемент 36а и замковый элемент 78а второго фиксирующего узла 76а под действием приложенного к соединительному элементу 82а зажимного усилия, отжимаются обратно в исходное, т.е. запирающее, положение, перемещаясь, соответственно, в осевом направлении и вдоль оси установки.
В полностью смонтированном состоянии модуль 10а крепления рабочего инструмента неподвижно соединен с базовым модулем 12а ручной машины. Базовый модуль 12а ручной машины и модуль 10а крепления ее рабочего инструмента вместе образуют ручную машину 46а. В принципе также возможен вариант осуществления изобретения, в котором для полного укомплектования ручной машины 46а к базовому модулю 12а ручной машины и/или модулю 10а крепления ее рабочего инструмента присоединяют другие модули. При этом для соединения модуля 10а крепления рабочего инструмента с базовым модулем 12а ручной машины основной приводной элемент 38а базового модуля 12а ручной машины соединяют за счет геометрического замыкания с основной частью 14а держателя 62а рабочего инструмента, входящего в состав модуля 10а крепления рабочего инструмента. Это обеспечивает возможность передачи вращения основного приводного элемента 38а, а также ударного импульса бойка ударного устройства 50а на расположенный в держателе 62а рабочий инструмент 48а.
На фиг. 2 показан предварительно смонтированный модуль 10а крепления рабочего инструмента. При этом предварительно смонтированный модуль 10а крепления рабочего инструмента содержит первый фиксирующий узел 66а, второй фиксирующий узел 76а, на фиг. 2 подробно не показанный, и основную часть 14а, выполненную в виде основной части патрона. Для присоединения модуля 10а крепления рабочего инструмента к базовому модулю 12а ручной машины модуль 10а крепления рабочего инструмента содержит три стопорных элемента, два из которых обозначены номерами 20а, 22а, а третий стопорный элемент на чертеже не показан. В принципе, модуль 10а крепления рабочего инструмента также может иметь иное число стопорных элементов 20а, 22а. Стопорные элементы 20а, 22а выполнены в виде штифтов. Выполненные в виде штифтов стопорные элементы 20а, 22а образованы полнотелыми цилиндрами. Выполненные в виде штифтов стопорные элементы 20а, 22а имеют на каждом своем конце фаску. В принципе, вместо фасок на концах стопорные элементы 20а, 22а могут быть выполнены с закругленными концами. Для установки стопорных элементов 20а, 22а в основной части 14а имеются соответствующие пазы 16а, 18а, причем один из пазов на чертеже также не показан. Каждый паз 16а, 18а представляет собой сквозное отверстие, выполненное в основной части 14а в радиальном направлении. При этом пазы 16а, 18а для размещения стопорных элементов 20а, 22а распределены по окружности основной части 14а асимметрично, т.е. неравномерно, что обеспечивает однозначность монтажа модуля 10а крепления рабочего инструмента на базовом модуле 12а ручной машины. В принципе же пазы 16а, 18а для размещения стопорных элементов 20а, 22а также могут быть распределены по окружности основной части 14а симметрично, или равномерно, т.е. могут находиться на одинаковом расстоянии друг от друга. При этом стопорные элементы 20а, 22а расположены в пазах 16а, 18а с зазором. Благодаря тому, что стопорные элементы 20а, 22а расположены в соответствующих пазах 16а, 18а с зазором, стопорные элементы 20а, 22а могут поворачиваться в пазах 16а, 18а и перемещаться в них вдоль направления их протяженности. Стопорные элементы 20а, 22а предусмотрены для геометрического замыкания с базовым модулем 12а ручной машины с целью неподвижного присоединения модуля 10а крепления рабочего инструмента к базовому модулю 12а ручной машины.
Модуль 10а крепления рабочего инструмента содержит зажимное устройство 24а. Зажимное устройство 24а предусмотрено для того, чтобы в предварительно смонтированном состоянии модуля 10а крепления рабочего инструмента фиксировать стопорные элементы 20а, 22а в соответствующих пазах основной части 14а. Такая фиксация обеспечивает простоту предварительного монтажа стопорных элементов 20а, 22а в модуле 10а крепления рабочего инструмента и позволяет застраховать стопорные элементы от выпадения при транспортировке и/или хранении модуля крепления рабочего инструмента до его монтажа на базовом модуле 12а ручной машины. Зажимное устройство 24а обеспечивает приложение к стопорным элементам 20а, 22а зажимного усилия, направленного ортогонально радиальному направлению, определяющему ориентацию пазов 16а, 18а, в которых расположены стопорные элементы 20а, 22а, вследствие чего стопорные элементы 20а, 22а заклиниваются в соответствующих пазах 16а, 18а. При этом в предварительно смонтированном состоянии модуля крепления рабочего инструмента зажатые в пазах 16а, 18а стопорные элементы 20а, 22а перекрыты радиально снаружи корпусным элементом 36а. Корпусной элемент 36а в предварительно смонтированном состоянии модуля крепления рабочего инструмента проходит от своей передней опоры до области, находящейся за пазами 16а, 18а в основной части 14а, тем самым защищая стопорные элементы 20а, 22а снаружи.
Для фиксации стопорных элементов 20а, 22а зажимное устройство 24а содержит промежуточный элемент 26а и упругое звено 28а. Упругое звено 28а содержит упругий элемент, выполненный в виде спиральной пружины. Упругое звено 28а расположено между корпусным элементом 36а и основной частью 14а. При этом своим первым концом упругое звено 28а упирается в соединительный элемент 82а второго фиксирующего узла 76а. Своим вторым концом упругое звено 28а упирается в промежуточный элемент 26а. Благодаря этому упругое звено 28а создает зажимное усилие для второго фиксирующего узла 76а. Таким образом, упругое звено 28а входит в состав зажимного устройства 24а и второго фиксирующего узла 76а, поскольку упругое звено 28а создает зажимное усилие, действующее на соединительный элемент 82а второго фиксирующего узла 76а. При этом упругое звено 28а установлено в предварительно напряженном состоянии между соединительным элементом 82а второго фиксирующего узла 76а и промежуточным элементом 26а. Промежуточный элемент 26а расположен между упругим звеном 28а и основной частью 14а. При этом модуль 10а крепления рабочего инструмента для осевого стопорения промежуточного элемента 26а на основной части 14а в полностью смонтированном состоянии имеет стопорное кольцо 86а. Стопорное кольцо 86а расположено с противоположной переднему концу ручной машины 46а стороны промежуточного элемента 26а и в полностью смонтированном состоянии модуля крепления рабочего инструмента по меньшей мере частично передает усилие, создаваемое упругим звеном 28а и прикладываемое к промежуточному элементу 26а, на основную часть 14а. Промежуточный элемент 26а выполнен в виде шайбы. При этом шайба, образующая промежуточный элемент 26а, имеет неплоскую форму. Будучи установлен в модуле 10а крепления рабочего инструмента, промежуточный элемент 26а проходит в радиальном направлении от основной части 14а внутри до внутренней стороны корпусного элемента 36а снаружи. Промежуточный элемент 26а служит опорой для установки корпусного элемента 36а на основной части 14а.
В предварительно смонтированном состоянии модуля крепления рабочего инструмента промежуточный элемент 26а прилегает к стопорным элементам 20а, 22а сбоку. Благодаря тому, что упругое звено 28а находится в предварительно напряженном состоянии, промежуточный элемент 26а поджат к стопорным элементам 20а, 22а, которые в результате этого зажаты в пазах 16а, 18а. Для этого промежуточный элемент 26а имеет удерживающий участок 30а, который в предварительно смонтированном состоянии модуля крепления рабочего инструмента прилегает к стопорным элементам 20а, 22а. Удерживающим участком 30а промежуточный элемент 26а контактирует со стопорными элементами 20а, 22а. При этом удерживающий участок 30а ориентирован перпендикулярно стопорным элементам 20а, 22а. Удерживающий участок 30а ориентирован ортогонально пазам 16а, 18а, в которых установлены стопорные элементы 20а, 22а. Посредством ортогонально ориентированного удерживающего участка 30а стопорные элементы 20а, 22а нагружаются промежуточным элементом 26а лишь в осевом направлении основной части 14а, т.е. ортогонально протяженности пазов 16а, 18а, в которых стопорные элементы 20а, 22а расположены. При этом промежуточный элемент 26а не прикладывает к стопорным элементам 20а, 22а усилий, действующих в радиальном направлении. В предварительно смонтированном состоянии модуля крепления рабочего инструмента, в котором стопорные элементы 20а, 22а зафиксированы промежуточным элементом 26а и упругим звеном 28а в соответствующих пазах 16а, 18а, стопорные элементы 20а, 22а выступают радиально наружу из пазов 16а, 18а. При этом стопорные элементы 20а, 22а расположены в пазах 16а, 18а менее чем на 50%. Большая часть стопорных элементов 20а, 22а выступает радиально наружу из пазов 16а, 18а. Под действием усилия, прикладываемого к стопорным элементам 20а, 22а через удерживающий участок 30а промежуточного элемента 26а, стопорные элементы 20а, 22а слегка перекашиваются внутри пазов 16а, 18а. Благодаря тому, что стопорные элементы 20а, 22а своей большей частью выступают из соответствующих пазов 16а, 18а, усилие, прикладываемое к стопорным элементам 20а, 22а через удерживающий участок 30а промежуточного элемента 26а, создает момент, вызывающий заклинивание стопорных элементов 20а, 22а в пазах 16а, 18а, в которых стопорные элементы 20а, 22а расположены с зазором.
Промежуточный элемент 26а имеет упор 32а для фиксации стопорных элементов 20а, 22а в радиальном направлении при нахождении модуля крепления рабочего инструмента в предварительно смонтированном состоянии модуля крепления рабочего инструмента. Упор 32а предусмотрен для того, чтобы в предварительно смонтированном состоянии предохранять стопорные элементы 20а, 22а от выскальзывания из пазов 16а, 18а радиально наружу. Для этого упор 32а выполнен в промежуточном элементе 26а радиально снаружи от удерживающего участка 30а промежуточного элемента 26а. Упор 32а выполнен в виде уступа. В принципе упор 32а также может быть выполнен, например, выдавленной штамповкой впадины. Упор 32а фиксирует стопорные элементы 20а, 22а, находящиеся в зажатом в основной части 14а состоянии, в радиальном направлении снаружи, т.е. от радиального смещения наружу.
Промежуточный элемент 26а имеет конический участок 34а, предусмотренный для того, чтобы в определенном состоянии монтажа преобразовывать силу упругости упругого звена 28а в силу поджатия, действующую в радиальном направлении на стопорные элементы 20а, 22а. Для этого конический участок 34а расположен в промежуточном элементе 26а радиально внутри удерживающего участка 30а. На коническом участке 34а промежуточный элемент 26а простирается наклонно относительно удерживающего участка 30а и в смонтированном состоянии проходит радиально внутрь и вперед, глядя в направлении переднего конца модуля 10а крепления рабочего инструмента. Конический участок 34а образует конусную поверхность 88а, обращенную к стопорным элементам 20а, 22а. В состоянии, в котором стопорные элементы 20а, 22а зажаты промежуточным элементом 26а и упругим звеном 28а в пазах 16а, 18а основной части 14а, конический участок 34а расположен на расстоянии от стопорных элементов 20а, 22а, т.е. в этом состоянии конусная поверхность 88а не контактирует со стопорными элементами 20а, 22а. В процессе монтажа модуля 10а крепления рабочего инструмента на базовом модуле 12а ручной машины конический участок 34а своей конусной поверхностью 88а входит в контакт со стопорными элементами 20а, 22а и таким образом посредством конусной поверхности 88а преобразует силу упругости упругого звена 28а в силу поджатия, действующую на стопорные элементы 20а, 22а в радиальном направлении внутрь. При этом стопорные элементы 20а, 22а, скользя по конусной поверхности 88а конического участка 34а, перемещаются радиально внутрь в соответствующие пазы 16а, 18а. При этом конический участок 34а расположен относительно радиального направления, а значит, и удерживающего участка 30а промежуточного элемента 26а, под углом 45°. В принципе удерживающий участок 30а может быть расположен относительно радиального направления и под другим углом, находящимся в интервале значений от 15 до 75°.
При нахождении модуля 10а крепления рабочего инструмента в соединенном с базовым модулем 12а ручной машины, т.е. полностью смонтированном, состоянии зажимное устройство 24а предусмотрено для фиксации стопорных элементов 20а, 22а. Модуль 10а крепления рабочего инструмента в собранном состоянии надевается своей основной частью 14а на основной приводной элемент 38а базового модуля 12а ручной машины. Для этого основная часть 14а модуля 10а крепления рабочего инструмента имеет гнездо 90а. Гнездо 90а образовано радиально внутренней поверхностью основной части 14а. При этом основной приводной элемент 38а базового модуля 12а ручной машины входит в гнездо 90а основной части 14а. Основной приводной элемент 38а для этого имеет приемный участок 92а, который в смонтированном состоянии расположен в гнезде 90а основной части 14а. При этом радиально наружная поверхность 94а основного приводного элемента 38а прилегает к радиально внутренней поверхности основной части 14а. Этим достигается взаимное позиционирование модуля 10а крепления рабочего инструмента и базового модуля 12а ручной машины. Для соединения основной части 14а модуля 10а крепления рабочего инструмента и основного приводного элемента 38а базового модуля 12а ручной машины с фиксацией от проворачивания относительно друг друга предусмотрены стопорные элементы 20а, 22а. Для присоединения стопорных элементов 20а, 22а к базовому модулю 12а ручной машины с геометрическим замыканием между ними основной приводной элемент 38а имеет на каждый стопорный элемент 20а, 22а по одному пазу 40а, 42а, причем один из пазов на чертежах не показан. Пазы 40а, 42а, имеющиеся в основном приводном элементе 38а, расположены в приемном участке 92а основного приводного элемента 38а. Пазы 40а, 42а выполнены в виде выемок, проходящих в радиальном направлении внутрь от радиально наружной поверхности 94а. При этом пазы 40а, 42а в основном приводном элементе 38а выполнены соответствующими пазам 16а, 18а в основной части 14а. По меньшей мере в одном правильно смонтированном состоянии ручной машины все пазы 40а, 42а в основном приводном элементе 38а совмещены с пазами 16а, 18а в основной части 14а модуля 10а крепления рабочего инструмента. Для соединения модуля 10а крепления рабочего инструмента с базовым модулем 12а ручной машины, достигаемого за счет геометрического замыкания между ними и потому обеспечивающего их фиксацию от взаимного проворачивания, каждый из стопорных элементов 20а, 22а располагается как в своем пазу 16а, 18а основной части 14а, так и в соответствующем пазу 40а, 42а основного приводного элемента 38а. Посредством стопорных элементов 20а, 22а в смонтированном состоянии модуля крепления рабочего инструмента, т.е. после установки модуля крепления рабочего инструмента на базовый модуль ручной машины, между основным приводным элементом 38а и основной частью 14а, т.е. между базовым модулем 12а и модулем 10а крепления рабочего инструмента, может передаваться крутящий момент.
Для того, чтобы в смонтированном положении зафиксировать стопорные элементы 20а, 22а от перемещения в радиальном направлении внутрь, каждый из пазов 40а, 42а в основном приводном элементе 38а имеет соответствующий ограничитель 44а. Каждый ограничитель 44а выполнен в виде сужения, расположенного на внутреннем в радиальном направлении конце паза 40а, 42а. Сужения уменьшают проходное сечение выемок, образующих пазы 40а, 42а, вследствие чего расположенный в пазу 40а, 42а стопорный элемент 20а, 22а упирается с радиально внутренней стороны в соответствующее сужение, образующее соответствующий ограничитель 44а. Это позволяет предотвратить выступание стопорных элементов 20а, 22а внутрь за внутреннюю поверхность основного приводного элемента 38а и их вхождение в контакт с бойком 56а ударного устройства 50а, сопровождающееся повышенным износом. В принципе ограничители 44а могут быть реализованы выполнением пазов 40а, 42а в основном приводном элементе 38а в виде глухих отверстий, открытых лишь радиально наружу и закрытых с радиально внутренней стороны.
Для фиксации стопорных элементов 20а, 22а в полностью смонтированном состоянии промежуточный элемент 26а имеет по одному фиксирующему участку 96а, 98а на каждый стопорный элемент 20а, 22а. Фиксирующие участки 96а, 98а расположены радиально внутри относительно конического участка 34а и завершают промежуточный элемент 26а с радиально внутренней стороны. Фиксирующие участки 96а, 98а отогнуты на 90° относительно удерживающего участка 30а промежуточного элемента 26а. При этом фиксирующие участки 96а, 98а проходят параллельно радиально наружной поверхности 100а основной части 14а. В полностью смонтированном состоянии модуля крепления рабочего инструмента, в котором стопорные элементы 20а, 22а максимально утоплены в пазы 40а, 42а основного приводного элемента 38а, а промежуточный элемент 26а прилегает к стопорному кольцу 86а, фиксирующие участки 96а, 98а промежуточного элемента 26а расположены радиально снаружи пазов 16а, 18а основной части 14а и расположенных в них стопорных элементов 20а, 22а. Силой упругости упругого звена 28а, действующей на промежуточный элемент 26а, стопорные элементы 20а, 22а вдавливаются посредством фиксирующих участков 96а, 98а промежуточного элемента 26а в радиальном направлении внутрь и тем самым фиксируются в пазах 16а, 18а основной части 14а и пазах 40а, 42а основного приводного элемента 38а. Зажимное устройство 24а препятствует выскальзыванию стопорных элементов 20а, 22а из пазов 40а, 42а основного приводного элемента 38а и пазов 16а, 18а основной части 14а в радиальном направлении, в частности также во время работы ручной машины 46а, когда при вращении основного приводного элемента 38а на стопорные элементы 20а, 22а действуют направленные радиально наружу центробежные силы.
Ниже кратко рассматривается процесс монтажа модуля 10а крепления рабочего инструмента на базовом модуле 12а ручной машины. Модуль 10а крепления рабочего инструмента полностью предварительно смонтирован, при этом стопорные элементы 20а, 22а посредством зажимного устройства 24а зафиксированы в пазах 16а, 18а основной части 14а. Основную часть 14а надевают гнездом 90а на приемный участок 92а основного приводного элемента 38а. Тем самым модуль 10а крепления рабочего инструмента предварительно фиксируют на базовом модуле 12а ручной машины. Теперь стопорные элементы 20а, 22а радиально вдавливают в соответствующие пазы 16а, 18а, в результате чего стопорные элементы 20а, 22а отходят от удерживающего участка 30а промежуточного элемента 26а. Благодаря тому, что стопорные элементы 20а, 22а слегка зашли в пазы 16а, 18а основной части 14а, упругое звено 28а и промежуточный элемент 26а с конусной поверхностью 88а конического участка 34а вдавливают стопорные элементы радиально внутрь в пазы 16а, 18а. Если при этом пазы 16а, 18а в основной части 14а не совмещены с пазами 40а, 42а в основном приводном элементе 38а, то стопорные элементы 20а, 22а прижимаются зажимным устройством 24а, т.е. упругим звеном 28а и промежуточным элементом 26а, к радиально наружной поверхности 94а основного приводного элемента 38а. Теперь сборщик может повернуть модуль 10а крепления рабочего инструмента относительно базового модуля 12а ручной машины до тех пор, пока пазы 16а, 18а в основной части 14а не совместятся с соответствующими пазами 40а, 42а основного приводного элемента 38а, вследствие чего стопорные элементы 20а, 22а под действием силы поджатия, прикладываемой зажимным устройством 24а к стопорным элементам 20а, 22а, автоматически войдут в пазы 40а, 42а основного приводного элемента 38а, пока они не упрутся в ограничители 44а пазов 40а, 42а. Как только стопорные элементы 20а, 22а окажутся в пазах 40а, 42а, упругое звено 28а протолкнет промежуточный элемент 26а поверх стопорных элементов 20а, 22а, и фиксирующие участки 96а, 98а промежуточного элемента 26а зафиксируют стопорные элементы 20а, 22а в пазах 16а, 18а, 40а, 42а. При этом в полностью смонтированном состоянии модуля крепления рабочего инструмента радиально внешние концы стопорных элементов 20а, 22а проходят вровень с радиально наружной поверхностью 100а основной части 14а. Промежуточный элемент 26а теперь прилегает к стопорному кольцу 86а, и модуль 10а крепления рабочего инструмента полностью смонтирован на базовом модуле ручной машины. Для демонтажа модуля 10а крепления рабочего инструмента с базового модуля 12а ручной машины сборщик может от руки или с помощью инструмента сдвинуть промежуточный элемент 26а вперед, преодолев силу упругости упругого звена 28а, после чего стопорные элементы 20а, 22а можно извлечь из пазов 40а, 42а основного приводного элемента 38а, например с помощью соответствующего инструмента. После извлечения стопорных элементов из пазов 40а, 42а основного приводного элемента 38а модуль 10а крепления рабочего инструмента можно снять с базового модуля 12а ручной машины.
На фиг. 6-8 представлено еще три варианта осуществления изобретения. Нижеследующее описание и поясняющие его чертежи в основном ограничиваются различиями между вариантами осуществления изобретения, причем в отношении одинаково называемых элементов конструкции, в частности элементов конструкции, обозначенных теми же номерами позиций, в принципе можно обращаться к чертежам и/или описанию других вариантов осуществления изобретения, в частности к фиг. 1-5. Для проведения различий между вариантами осуществления изобретения номера позиций на фиг. 1-5, поясняющих первый вариант осуществления изобретения, снабжены буквой "а". В вариантах осуществления изобретения, представленных на фиг. 6-8, буква "а" заменена буквами "b"-"d".
На фиг. 6 показан второй вариант выполнения предлагаемого в изобретении модуля 10b крепления рабочего инструмента ручной машины. В отличие от первого варианта осуществления изобретения, представленного на фиг. 1-5, стопорные элементы 20b, 22b для соединения базового модуля 12b ручной машины с модулем 10b крепления ее рабочего инструмента за счет геометрического замыкания, выполнены частично иным образом. Стопорные элементы 20b, 22b также расположены в пазах 16b, 18b основной части 14b модуля 10b крепления рабочего инструмента. Но при этом в полностью смонтированном состоянии модуля крепления рабочего инструмента стопорные элементы 20b, 22b выступают в радиальном направлении за радиально наружную поверхность 100b основной части 14b. В вышеупомянутом полностью смонтированном состоянии, в котором стопорные элементы 20b, 22b максимально погрузились в пазы 40b, 42b основного приводного элемента 38b базового модуля 12b ручной машины, они выдаются из пазов 16b, 18b основной части 14b. При этом в вышеупомянутом полностью смонтированном состоянии промежуточный элемент 26b зажимного устройства 24b прилегает своими фиксирующими участками 96b, 98b радиально снаружи к стопорным элементам 20b, 22b и таким образом фиксирует их в пазах 16b, 18b, 40b, 42b.
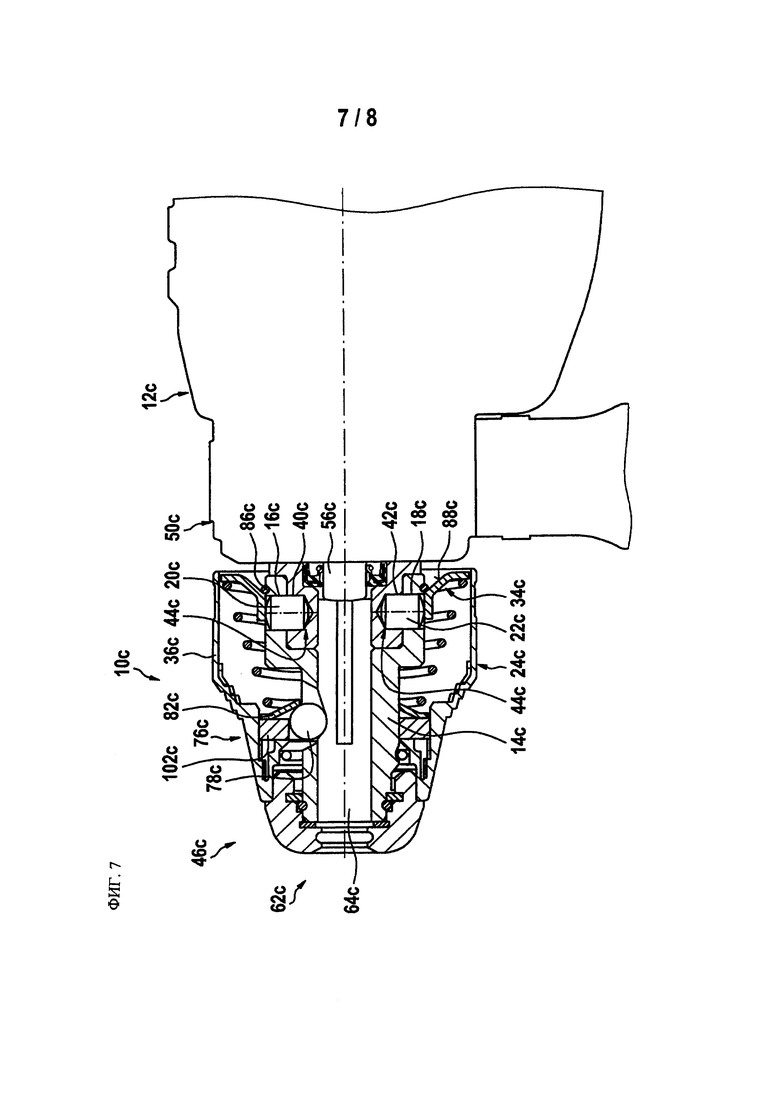
На фиг. 7 показан третий вариант выполнения предлагаемого в изобретении модуля 10с крепления рабочего инструмента ручной машины. Модуль 10с крепления рабочего инструмента выполнен в виде модульного патрона SDS, предусмотренного для присоединения к ручной машине 46с рабочих инструментов с SDS-хвостовиком. Ручная машина 46с содержит базовый модуль 12с, с которым в полностью смонтированном состоянии соединен модуль 10с крепления рабочего инструмента. В противоположность первому варианту осуществления изобретения, представленному на фиг. 1-5, модуль 10с крепления рабочего инструмента содержит лишь один фиксирующий узел 76с. При этом фиксирующий узел 76с предусмотрен для фиксации рабочих инструментов с SDS-хвостовиком. Модуль 10с крепления рабочего инструмента содержит основную часть 14с. Основная часть 14с выполнена в виде держателя рабочего инструмента. При этом фиксирующий узел 76с имеет ту же функцию, что и второй фиксирующий узел по первому варианту осуществления изобретения. Фиксирующий узел 76с содержит замковый элемент 78с. При этом замковый элемент 78с выполнен в виде шарика. Замковый элемент 78с расположен в пазу основной части 14с. Для фиксации выполненного в виде шарика замкового элемента 78с фиксирующий узел 76с имеет удерживающее кольцо 102с. Удерживающее кольцо 102с закреплено в корпусном элементе 36с модуля 10с крепления рабочего инструмента. Фиксирующий узел 76с содержит соединительный элемент 82с, выполненный в виде шайбы. Соединительный элемент 82с находится в контакте с выполненным в виде шарика замковым элементом 78с. На соединительный элемент 82с действует зажимное усилие, которое в рабочем состоянии, в котором замковый элемент 78с фиксирующего узла 76с выведен из своего запирающего положения, и в рабочем состоянии, в котором замковый элемент 78с входит в замковый элемент 80с закрепленного рабочего инструмента с SDS-хвостовиком, нагружает усилием замковый элемент 78с фиксирующего узла 76с.
Модуль 10с крепления рабочего инструмента также содержит зажимное устройство 24с, имеющее упругое звено 28с и промежуточный элемент 26с. В полностью смонтированном состоянии модуля крепления рабочего инструмента промежуточный элемент 26с также соединен с основной частью 14с, посредством стопорного кольца 86с. Упругое звено 28с упирается в промежуточный элемент 26с и соединительный элемент 82с фиксирующего узла 76с и при этом находится в предварительно напряженном состоянии. Благодаря этому упругое звено 28с прикладывает к соединительному элементу 82с зажимное усилие. В полностью смонтированном состоянии модуля крепления рабочего инструмента промежуточный элемент 26с расположен своими фиксирующими участками 96с, 98с на стопорных элементах 20с, 22с модуля 10с крепления рабочего инструмента, соединяющих основную часть 14с модуля 10с крепления рабочего инструмента с основным приводным элементом 38с базового модуля 12с ручной машины. При этом для образования вышеупомянутого соединения с геометрическим замыканием стопорные элементы 20с, 22с расположены в пазах 16с, 18с основной части 14с и в пазах 40с, 42с основного приводного элемента 38с. При этом пазы 40с, 42с основного приводного элемента 38с выполнены в виде глухих отверстий.
В принципе фиксирующий узел 76с для крепления рабочих инструментов с SDS-хвостовиком, описанный для рассматриваемого варианта осуществления изобретения, может быть выполнен так же, как и второй фиксирующий узел в первом варианте осуществления изобретения. При этом предварительно смонтированное состояние модуля 10 с крепления рабочего инструмента будет в основном аналогичным таковому в первом варианте осуществления изобретения, причем в этом случае модуль крепления рабочего инструмента будет содержать лишь детали, относящиеся к фиксирующему узлу 76с. При этом, в отличие от первого варианта осуществления изобретения, модуль 10с крепления рабочего инструмента не будет содержать другого фиксирующего узла для присоединения обычных рабочих инструментов, например фиксирующего узла, соответствующего первому фиксирующему узлу в первом варианте осуществления изобретения. В принципе модуль 10с крепления рабочего инструмента также может содержать дополнительный и/или другой фиксирующий узел для фиксации других рабочих инструментов.
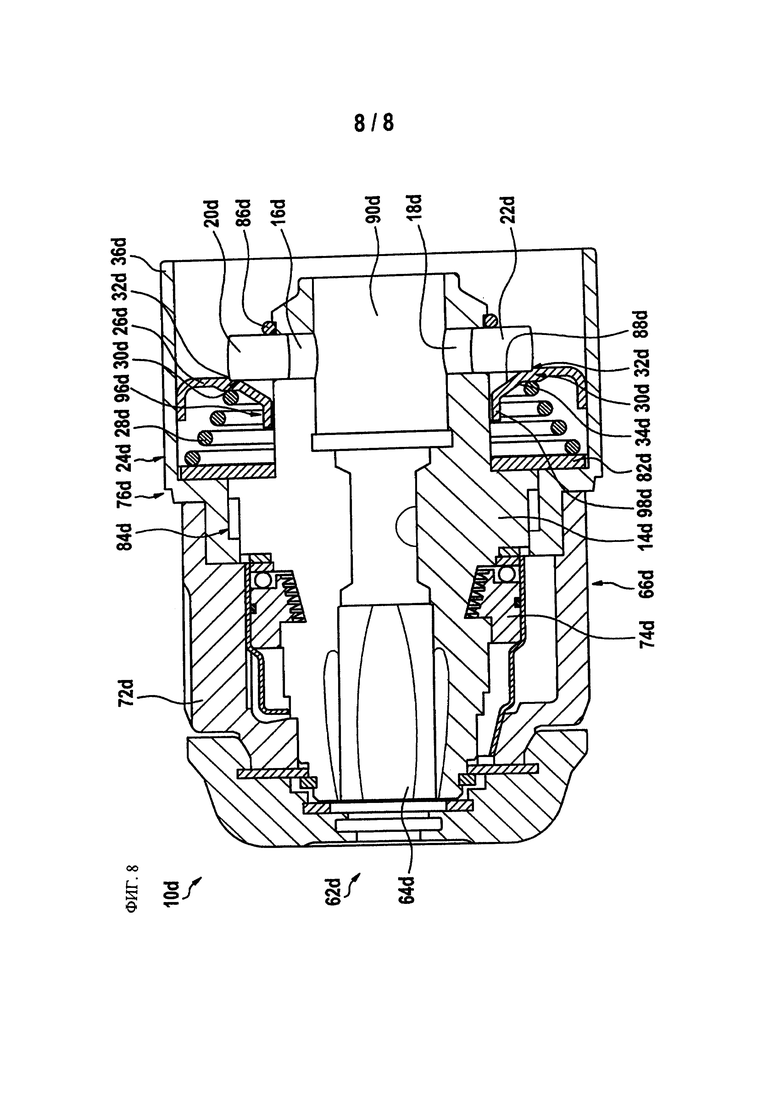
На фиг. 8 показан четвертый вариант выполнения предлагаемого в изобретении модуля 10d крепления рабочего инструмента ручной машины. Модуль 10d крепления рабочего инструмента выполнен в основном так же, как и модуль крепления рабочего инструмента в первом варианте осуществления изобретения, изображенном на фиг. 1-5. Аналогично первому варианту осуществления изобретения, модуль 10d крепления рабочего инструмента, содержит первый фиксирующий узел 66d и второй фиксирующий узел 76d. Модуль 10d крепления рабочего инструмента содержит зажимную втулку 72d, которая радиально окружает первый фиксирующий узел 66d. При этом зажимная втулка 72d установлена с возможностью поворота относительно основной части 14d. Фиксирующий узел 66d содержит резьбовое кольцо 74d, соединенное с зажимной втулкой 72d с фиксацией от проворачивания относительно нее. При этом резьбовое кольцо 74d имеет внутренние зубья, находящиеся в зацеплении с зубьями зажимных кулачков 68d первого фиксирующего узла 66d. При повороте резьбового кольца 74d вследствие вращения зажимной втулки 72d зажимные кулачки 68d перемещаются, при неподвижной основной части 14d, внутри выемок в основной части 14d вдоль своих осей и таким образом могут либо смыкаться, либо раскрываться. Благодаря этому оператор, вращая выполненную в виде элемента управления зажимную втулку 72d, может изменять положение зажимных кулачков 68d, т.е. зажимать рабочий инструмент 48d или освобождать его. Для управления вторым фиксирующим узлом 76d модуль 10d крепления рабочего инструмента содержит корпусной элемент 36d. Корпусной элемент 36d выполнен в виде втулки и окружает радиально снаружи второй фиксирующий узел 76d. Для установки корпусного элемента 36d на основной части 14d модуль 10d крепления рабочего инструмента имеет переднюю опору 84d. Опора 84d расположена у переднего конца корпусного элемента 36d, выступающего в область под зажимной втулкой 72d.
Как и в первом варианте осуществления изобретения, модуль 10d крепления рабочего инструмента содержит зажимное устройство 24d, предусмотренное для фиксации стопорных элементов 20d, 22d в предварительно смонтированном модуле 10d крепления рабочего инструмента. При этом зажимное устройство 24d содержит промежуточный элемент 26d и упругое звено 28d, выполненные в основном так же, как и в первом варианте осуществления изобретения. Будучи установлен в модуле 10d крепления рабочего инструмента, промежуточный элемент 26d проходит в радиальном направлении от основной части 14d внутри до внутренней стороны корпусного элемента 36d снаружи. Промежуточный элемент 26d служит опорой для установки корпусного элемента 36d на основной части 14d. При этом промежуточный элемент 26d соединен с корпусным элементом 36d и основной частью 14d с фиксацией от проворачивания относительно них. Корпусной элемент 36d при этом установлен с возможностью поворота относительно зажимной втулки 72d. Корпусной элемент 36d для второго фиксирующего узла 76d выполняет те же функции, что и соответствующий корпусной элемент по первому варианту осуществления изобретения. При этом, в отличие от первого варианта осуществления изобретения, для управления первым фиксирующим узлом 66d здесь предусмотрена зажимная втулка 72d. Таким образом, модуль 10d крепления рабочего инструмента имеет два управляющих элемента, которые выполнены в виде втулок и каждый из которых предусмотрен для управления одним из фиксирующих узлов 66d, 76d.
Изобретение относится к модулю крепления рабочего инструмента ручной машины, соединяемого с базовым модулем ручной машины. Модуль крепления рабочего инструмента содержит основную часть и расположенный в пазу основной части стопорный элемент, предусмотренный для геометрического замыкания с базовым модулем ручной машины с целью присоединения к последнему. Модуль крепления рабочего инструмента ручной машины содержит зажимное устройство, которое в предварительно смонтированном состоянии модуля крепления рабочего инструмента фиксирует стопорный элемент в пазу основной части. В результате чего обеспечивается удобное временное хранение модуля крепления рабочего инструмента ручной машины в предварительно смонтированном состоянии и быстрая и простая установка его на базовый модуль ручной машины. 2 н. и 10 з.п. ф-лы, 8 ил. 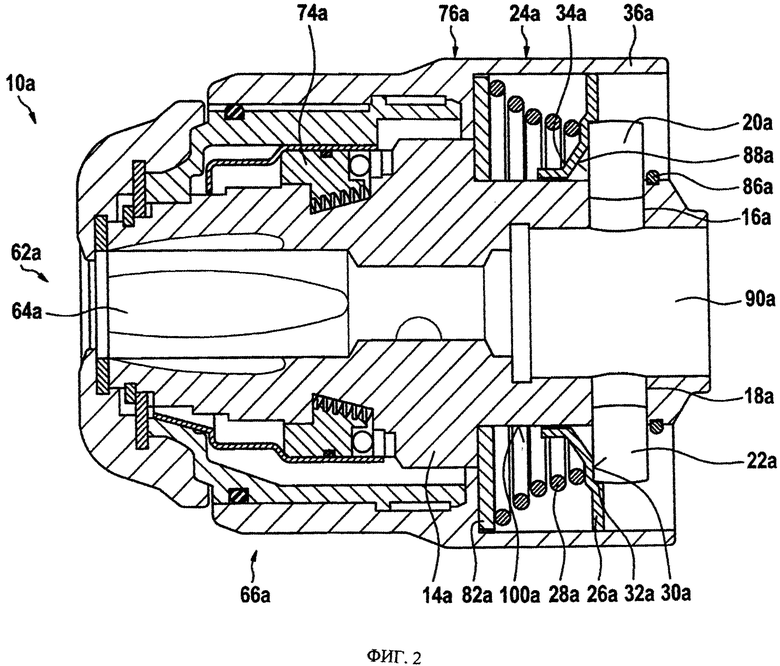
1. Модуль крепления рабочего инструмента ручной машины, соединяемый с базовым модулем (12а; 12b; 12с; 12d) ручной машины и содержащий по меньшей мере одну основную часть (14а; 14b; 14с; 14d) и по меньшей мере один расположенный в пазу (16а, 18а; 16b, 18b; 16с, 18с; 16d, 18d) основной части (14а; 14b; 14с; 14d) стопорный элемент (20а, 22а; 20b, 22b; 20с, 22с; 20d, 22d), предусмотренный для геометрического замыкания с базовым модулем (12а; 12b; 12с; 12d) ручной машины и присоединения к последнему, отличающийся тем, что содержит по меньшей мере одно зажимное устройство (24а; 24b; 24с; 24d), которое по меньшей мере в предварительно смонтированном состоянии модуля крепления рабочего инструмента фиксирует по меньшей мере один стопорный элемент (20а, 22а; 20b, 22b; 20с, 22с; 20d, 22d) в пазу (16а, 18а; 16b, 18b; 16с, 18с; 16d, 18d) основной части (14а; 14b; 14с; 18d).
2. Модуль крепления рабочего инструмента по п. 1, отличающийся тем, что зажимное устройство (24а; 24b; 24с; 24d) предусмотрено для фиксации по меньшей мере одного стопорного элемента (20а, 22а; 20b, 22b; 20с, 22с; 20d, 22d) в смонтированном состоянии модуля крепления рабочего инструмента, в котором модуль крепления рабочего инструмента за счет геометрического замыкания соединен с базовым модулем (12а; 12b; 12с; 12d) ручной машины.
3. Модуль крепления рабочего инструмента по п. 1, отличающийся тем, что зажимное устройство (24а; 24b; 24с; 24d) содержит по меньшей мере один промежуточный элемент (26а; 26b; 26с; 26d) и упругое звено (28а; 28b; 28с; 28d), причем стопорный элемент (20а, 22а; 20b, 22b; 20с, 22с; 20d, 22d) для его фиксации зажат посредством упругого звена (28а; 28b; 28с; 28d) и промежуточного элемента (26а; 26b; 26с; 26d).
4. Модуль крепления рабочего инструмента по п. 3, отличающийся тем, что промежуточный элемент (26а; 26b; 26с; 26d) имеет удерживающий участок (30а; 30b; 30с; 30d), ориентированный по существу перпендикулярно по меньшей мере к одному стопорному элементу (20а, 22а; 20b, 22b; 20с, 22с; 20d, 22d) и контактирующий со стопорным элементом (20а, 22а; 20b, 22b; 20с, 22с; 20d, 22d) при нахождении последнего в зажатом в основной части (14а; 14b; 14с; 14d) состоянии.
5. Модуль крепления рабочего инструмента по п. 3, отличающийся тем, что промежуточный элемент (26а; 26b; 26с; 26d) имеет по меньшей мере один упор (32а; 32b; 32с; 32d), который фиксирует по меньшей мере один стопорный элемент (20а, 22а; 20b, 22b; 20с, 22с; 20d, 22d), находящийся в зажатом в основной части (14а; 14b; 14с; 14d) состоянии, в радиальном направлении снаружи.
6. Модуль крепления рабочего инструмента по п. 3, отличающийся тем, что промежуточный элемент (26а; 26b; 26с; 26d) имеет по меньшей мере один конический участок (34а; 34b; 34с; 34d), предусмотренный для того, чтобы по меньшей мере в одном состоянии монтажа преобразовывать силу упругости упругого звена (28а; 28b; 28с; 28d) в силу поджатия, действующую в радиальном направлении по меньшей мере на один стопорный элемент (20а, 22а; 20b, 22b; 20с, 22с; 20d, 22d).
7. Модуль крепления рабочего инструмента по п. 6, отличающийся тем, что конический участок (34а; 34b; 34с; 34d) расположен под углом от 15° до 75° к удерживающему участку (30а; 30b; 30с; 30d).
8. Модуль крепления рабочего инструмента по п. 1, отличающийся тем, что содержит по меньшей мере один корпусной элемент (36а; 36b; 36с; 36d), который в предварительно смонтированном состоянии модуля крепления рабочего инструмента перекрывает радиально снаружи по меньшей мере один стопорный элемент (20а, 22а; 20b, 22b; 20с, 22с; 20d, 22d).
9. Модуль крепления рабочего инструмента по одному из пп 1-8, отличающийся тем, что в его полностью смонтированном состоянии по меньшей мере один стопорный элемент (20b, 22b) выступает радиально наружу за пределы паза (16b, 18b), в котором стопорный элемент (20b, 22b) расположен.
10. Ручная машина, имеющая базовый модуль (12а; 12b; 12с) и модуль (10а; 10b; 10с) крепления рабочего инструмента по одному из пп. 1-9.
11. Ручная машина по п. 10, отличающаяся тем, что ее базовый модуль (12а; 12b; 12с) содержит по меньшей мере один приводной элемент (38а; 38b; 38с), в котором выполнен по меньшей мере один паз (40а, 42а; 40b, 42b; 40с, 42с), соответствующий одному стопорному элементу (20а, 22а; 20b, 22b; 20с, 22с), причем стопорный элемент (20а, 22а; 20b, 22b; 20с, 22с) входит в паз (40а, 42а; 40b, 42b; 40с, 42с) в полностью смонтированном состоянии модуля крепления рабочего инструмента.
12. Ручная машина по п. 11, отличающаяся тем, что по меньшей мере один паз (40а, 42а; 40b, 42b; 40с, 42с) в основном приводном элементе (38а; 38b; 38с) образует по меньшей мере один ограничитель (44а; 44b; 44с), поддерживающий стопорный элемент (20а, 22а; 20b, 22b; 20с, 22с) изнутри в радиальном направлении.
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
| Устройство крепления рабочего инструмента | 1989 |
|
SU1747260A1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ РАБОЧЕГО ИНСТРУМЕНТА | 1992 |
|
RU2072913C1 |
| Держатель для инструмента ударного действия | 1983 |
|
SU1138311A1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2010 |
|
RU2423268C1 |
| WO 2006045611 A1, 04.05.2006. | |||

