Область техники, к которой относится изобретение
Приводы авиационных и робототехнических систем
Уровень техники
Управление планирующими системами на основе мягких оболочек имеет следующие особенности:
1. Управление ведется подмоткой строп управления, причем в зависимости от режима на стропе всегда в той или иной степени присутствует натяжение. Соответственно, сервоприводы управления вынуждены иметь в своем составе помимо датчика обратной связи также тормоз и муфту сцепления, в противном случае на поддержание момента придется постоянно затрачивать энергию.
2. Управление характеризуется большими и быстрыми рабочими ходами, а также неравномерной нагрузкой, что вынуждает перетяжелять двигатели лебедки или использовать накопители энергии вращения, разгружающие двигатель на пиковых нагрузках. С другой стороны, эта особенность позволяет обойтись приводами без прецизионных механизмов и с крупным шагом перемещений.
Известны следящие приводы систем управления планирующими парашютами с механическим побуждением (например, патент РФ №2314427 или диссертация А.В. Макаренко «разработка методики расчета энергоэффективного автономного следящего привода системы управления планирующим парашютом), содержащие двигатель, редуктор, электромагнитный тормоз, электромагнитную муфту сцепления, датчик обратной связи, систему управления. Недостатками таких приводов являются сложная кинематика и логика управления, что вызывает рост стоимости и веса, а также уменьшение их надежности.
Если использовать дозированное (шаговое) перемещение исполнительного механизма, в данном случае поворот лебедки на определенный угол, то надобность в контуре обратной связи отпадет. Но шаговые двигатели (см., например, книгу Т. Кенио «Шаговые двигатели и их микропроцессорные системы управления») имеют предел усилия, после которого происходит срыв синхронизации. Это вынуждает использовать шаговые двигатели с завышенным на расчетную перегрузку усилием удержания. Кроме того, для поддержания момента шагового электродвигателя требуются постоянные затраты энергии, что вынуждает использовать тормоз и муфту сцепления и в этом случае.
Раскрытие изобретения
Целью изобретения является создание привода с отсутствием необходимости в обратной связи, тормозе и сцеплении, что позволит упростить, удешевить и облегчить его.
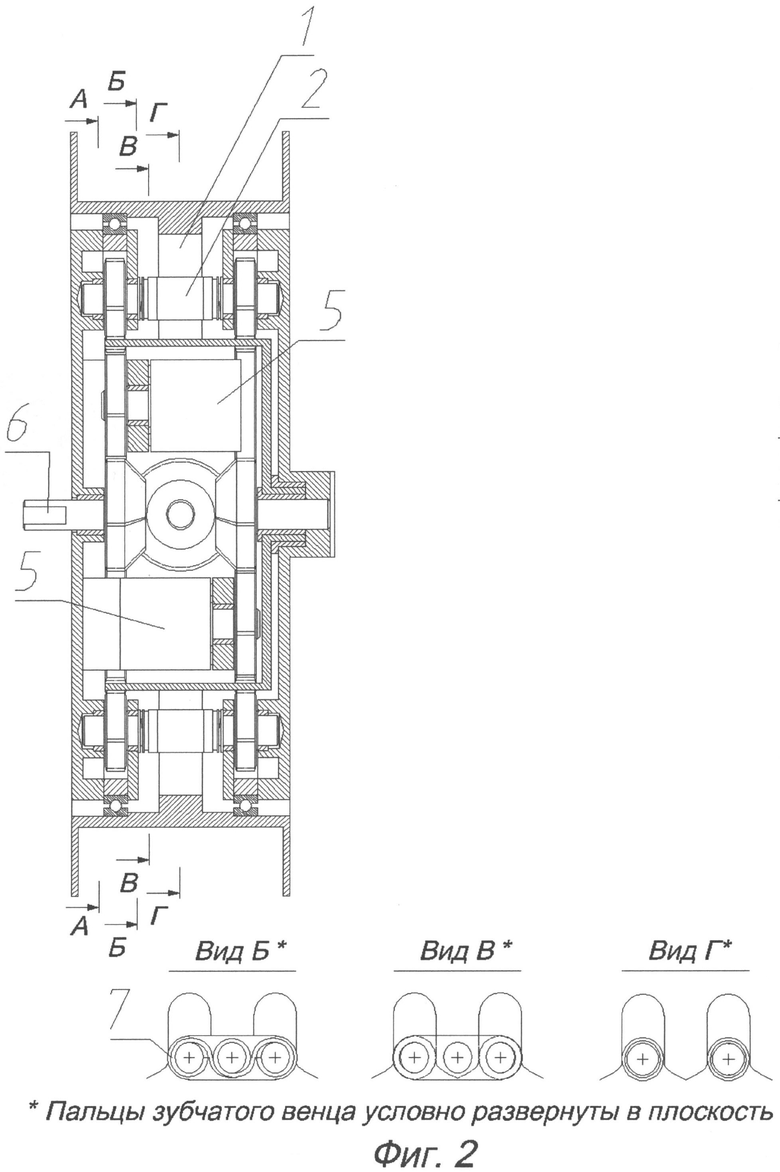
Цель изобретения достигается тем, что обеспечивается дозированное перемещение исполнительного механизма, а также его фиксация, посредством кинематического звена палец-кольцо, изображенного на фиг.1. Приводному кольцу 2 обеспечивается возможность проворота вокруг пальцев (зубцов) 1 с необходимым усилием, обеспечиваемым двигателем привода. Ось вращения кольца закреплена на приводе, а пальцы - на исполнительном механизме. Для облегчения вращения кольцо может снабжаться роликами. Для обеспечения устойчивой фиксации кольца на пальце, препятствующей смещению исполнительного механизма под действием нагрузки, кольцо может выполняться с упругим звеном 7 (см. виды Б, В, Г на фиг.2) и заглубляться на прямой участок пальца.
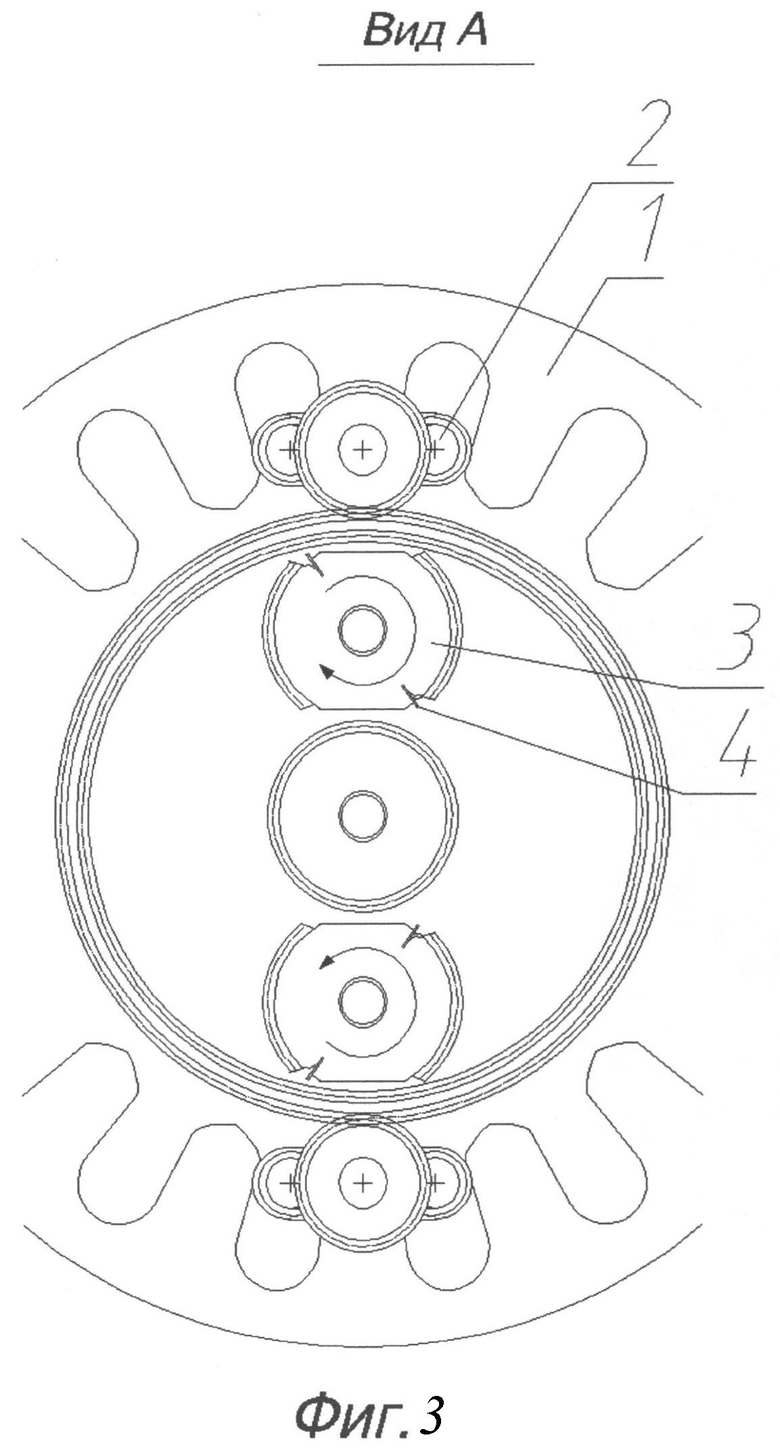
Обеспечить отсечку вращающего кольцо усилия по завершению им полуоборота без использования отдельного шагового привода может механизм на базе промежуточной шестерни с неполным зубчатым венцом 3 (вид А на фиг.3). Шестерня 3 установлена на валу микродвигателя 5, зафиксированного в корпусе привода и обеспечивающего проворот этой шестерни до зацепления с зубьями ведущей 6 и ведомой шестерен привода, а также фиксацию промежуточной шестерни в незацепленном положении до подачи команды на проворот.
Для синхронизации положения зубьев ведущей, ведомой и промежуточной шестерен в момент вхождения их зубьев в зацепление на промежуточной шестерне 3 может использоваться упругая пластина 4, первой входящая в зацепление. При попадании между зубьями ведущей/ведомой шестерен пластина 4, скользя по зубцу ведущей/ведомой шестерни, выравнивает положение набегающего зуба промежуточной шестерни относительно ведущей/ведомой. При попадании пластины на острие зуба ведущей/ведомой шестерни эта пластина изгибается так, что приводит острие зуба ведущей/ведомой шестерни в углубление перед набегающим зубом промежуточной шестерни.
Механическое побуждение привода обеспечивается через вал ведущей шестерни 6.
Краткое описание чертежей
На фиг.1 показана схема перемещений кинематической пары «палец-кольцо». Поз.1 обозначаются пальцы (зубцы). Поз.2 - кольцо.
На фиг.2 показан привод, имеющий катушку лебедки с зубчатым венцом 1, установленную на подшипники на корпусе механизма. Форма пальцев (зубцов) зубчатого венца исполнительного элемента позволяет входить им в зацепление с приводным кольцом 2.
Также на фиг.2 показаны кольцо с упругим звеном 7, шестерни с неполным зубчатым венцом 3 (вид А на фиг.3), имеющие упругие пластины 4 и установленные на валу микродвигателей 5, зафиксированных в корпусе привода, ведущая 6 и ведомая шестерни привода, а также ведущий вал с ведущей шестерней 6, ведущие шестерни передачи противоположного вращения.
Осуществление изобретения
Вариант исполнения привода на базе предлагаемого изобретения представлен на Фиг.2. В качестве исполнительного элемента в данном приводе выступает катушка лебедки с зубчатым венцом 1, установленная на подшипники на корпусе механизма. Для сглаживания импульсных нагрузок на привод во время шаговых перемещений катушка лебедки может соединяться с зубчатым венцом через демпфер. Форма пальцев (зубцов) зубчатого венца исполнительного элемента позволяет входить им в зацепление с приводным кольцом 2. В показанный привод можно встроить и несколько приводных колец 2 без изменения его кинематической цепи.
Описываемое изобретение может использоваться как с вращающимся исполнительным звеном, так и с исполнительным звеном линейного перемещения. В последнем случае зубчатый венец 1 развернут на плоскость, относительно которой и может линейно смещаться.
Механическое побуждение показанного привода удобно обеспечить либо от коробки отбора мощности основного двигателя, если таковой имеется, либо от двигателя управления приводом, например внутреннего сгорания. В последнем случае двигатель оснащается датчиком оборотов и следящим устройством, обеспечивающим номинальные обороты двигателя как на холостом, так и на рабочем ходу.
В приводах с относительно малым временем работы, например в системах посадки и десантирования, удобно использовать механическое побуждение на базе маховичных накопителей. В этом случае два встречно вращающихся маховика могут использоваться как в качестве источника механической энергии, так и в качестве опорного звена системы стабилизации вертикального положения купола (благодаря своему стремлению сохранять постоянное положение осей вращения относительно горизонта). Раскрутка маховичных накопителей производится от бортовой энергетической системы носителя непосредственно перед сбросом/посадкой.
В схемах механического побуждения с непостоянной частотой вращения приводного вала (например, с отбором мощности от основного двигателя или от маховиков) для обеспечения требуемой скорости перемещения исполнительного звена необходимо увеличивать частоту подачи импульсов перемещения с уменьшением частоты вращения приводного вала, для чего системе управления приводом необходим канал обратной связи с датчиком частоты оборотов приводного вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗУБЧАТО-ЦЕВОЧНЫЙ ШАГОВЫЙ ПРИВОД С МЕХАНИЧЕСКИМ ПОБУЖДЕНИЕМ И НУЛЕВЫМ ОБРАТНЫМ УСИЛИЕМ | 2016 |
|
RU2641563C2 |
| ФРИКЦИОННЫЙ ТОРОВЫЙ КОЛЬЦЕВОЙ ВАРИАТОР | 2006 |
|
RU2315214C2 |
| Система включения преимущественно для кривошипных прессов | 1981 |
|
SU1085329A1 |
| ЧАСЫ МЕХАНИЧЕСКОГО ИЛИ ЭЛЕКТРОМАГНИТНОГО ТИПА | 1992 |
|
RU2081445C1 |
| УСОВЕРШЕНСТВОВАНИЯ В ПОЗИЦИОННЫХ СЕРВОСИСТЕМАХ ИЛИ ОТНОСЯЩИЕСЯ К ТАКИМ СИСТЕМАМ | 1995 |
|
RU2149787C1 |
| Устройство для автоматического сцепления и расцепления шестерни стартера с венцом маховика двигателя | 1946 |
|
SU69511A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2648504C2 |
| ПОДВЕСКА, АВТОСТАБИЛИЗИРУЮЩАЯ МЯГКОЕ ПРИВЯЗНОЕ КРЫЛО (ВАРИАНТЫ) | 2010 |
|
RU2456210C2 |
| Устройство для радиального перемещения резца | 1975 |
|
SU599930A1 |
| ТОРМОЗ | 1995 |
|
RU2188346C2 |
Изобретение относится к приводам авиационных и робототехнических систем. Шаговый привод содержит двигатель, редуктор, систему управления. Шаговые перемещения исполнительного механизма привода обеспечиваются кинематическим звеном палец-кольцо, причем кольцо может проворачиваться вокруг пальцев (зубцов) с усилием, обеспечиваемым двигателем привода, на пол- оборота за шаг. Отсечка вращающего кольцо усилия по завершению им полуоборота производится посредством промежуточной шестерни с неполным зубчатым венцом. В результате нет необходимости в обратной связи, тормозе и сцеплении, что позволяет упростить конструкцию шагового привода. 1 з.п. ф-лы, 3 ил.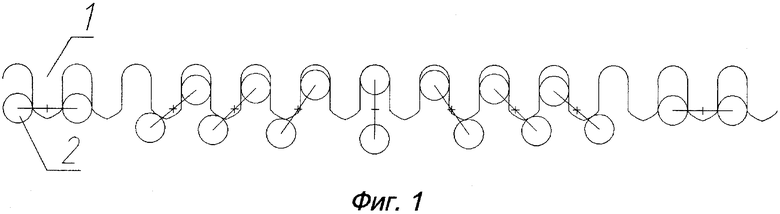
1. Шаговый привод, содержащий двигатель, редуктор, систему управления, отличающийся тем, что шаговые перемещения его исполнительного механизма обеспечиваются кинематическим звеном палец-кольцо, причем кольцо может проворачиваться вокруг пальцев (зубцов) с усилием, обеспечиваемым двигателем привода, на пол-оборота за шаг.
2. Шаговый привод по п.1, отличающийся тем, что передача вращения от двигателя к кольцу обеспечивается через промежуточную шестерню с неполным зубчатым венцом.
| Шаговый привод | 1978 |
|
SU796575A1 |
| Шаговый привод | 1983 |
|
SU1146501A1 |
| US 4875382 A, 24.10.1989 | |||
| ПРИВОД МИКРОПЕРЕМЕЩЕНИЙ И МИКРОПОДАЧ | 2010 |
|
RU2466004C2 |

