Область техники, к которой относится изобретение.
Транспортирование. Летательные аппараты тяжелее воздуха. Ветряные двигатели.
Уровень техники.
Известны попытки использования крыла со стропной подвеской в качестве парусного или поддерживающего привязного средства. Эти попытки выявили неустойчивость крыла данного типа на вертикали, проявляющуюся в заваливании крыла набок относительно точки наземного крепления при воздействии случайных порывов ветра или перемещении наземной точки подвески. Связано это с тем, что для крыла со стропной подвеской рястягивающие силы (аэродинамическая и реакции троса) действуют не по вертикали, как это происходит в случае свободнолетающего крыла с подвешенным к стропам грузом, а вдоль привязного троса. Как следствие, при отклонении от вертикали троса отклоняется от вертикали и аэродинамическая сила, так что возвращающий к вертикали момент отсутствует. Некоторую устойчивость привязной системе придает вес троса в случае его провисания, однако этот эффект при натяжении троса, то есть в рабочем режиме, исчезает.
Для борьбы с описанным явлением купол крыла оснащали противовесами. Ближайшим аналогом является решение, описанное в патенте US 2007/0120004 А1, сутью которого является стабилизирующий противовес, прикрепленный стропами к задней кромке привязного крыла. Однако для реализуемости данного решения требуется противовес достаточно большой массы, кроме того, его незакрепленность и удаленность от линии натяжения системы может приводить к колебаниям противовеса относительно крыла и троса большой амплитуды.
В случае если привязное крыло несет массивную полезную нагрузку, сама эта нагрузка может служить балансирным грузом. В этом случае оказывается удобнее управлять крылом не по задней, а по передней кромке. Изменение установочного угла по передней кромке при буксировке обеспечивает известная конструкция буксировочных концов параплана с разгонником, использующаяся, в частности, фирмой Nova (http://www.nova-wings.com/download/files/manschl.pdf), заставляющая опускаться переднюю кромку крыла во время буксировки путем укорочения передних свободных концов подвески крыла через полиспастный механизм акселератора. Однако данная конструкция уменьшает угол атаки обеих консолей крыла одновременно и не меняет этот угол при отклонении вектора тяги от направления скорости буксируемого аппарата.
Раскрытие изобретения.
Настоящим решением предлагается для крыла без массивной полезной нагрузки использовать противовес не в качестве силового, а в качестве информационного стабилизирующего устройства. При этом противовес выполняет функции следящей системы, отслеживающей вертикаль, и при отклонении от этой вертикали создает пропорциональную величине отклонения от нее аэродинамическую ассиметрию крыла, приводящую к торможению набегающей на трос консоли крыла или уменьшению аэродинамического сопротивления удаляющейся от троса консоли.
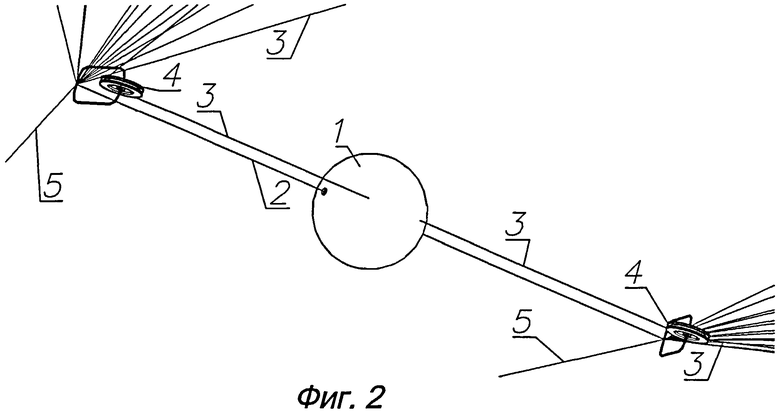
Предлагаемое решение представляет собой представленное на Фиг.1 и Фиг.2 полое мягкое привязное крыло на стропной подвеске, оснащенное балансировочным грузом, отличающееся тем, что балансировочный груз 1 продет через гибкую или жесткую направляющую 2, закрепленную между узлами крепления строп к вилке удерживающего троса 5, так, что может скользить по ней. К балансировочному грузу прикреплены концы управляющих строп 3, прокинутые через направляющие блоки 4.
При наклоне такой конструкции балансировочный груз смещается по направляющей в сторону наклона, подтягивая управляющую стропу приподнятой консоли. Отогнутая управляющей стропой задняя кромка приподнятой консоли приводит к торможению приподнятой консоли и развороту крыла относительно удерживающего троса вплоть до выравнивания направляющей, а вместе с ней и крыла относительно линии горизонта.
Для уменьшения усилия, необходимого для придания крылу заданной асимметрии, можно использовать свободные концы с компенсацией управляющего усилия, базирующихся на известной конструктивной схеме свободных концов с программируемым укорачиванием рядов посредством полиспастного механизма, описанной, например, в патенте DE 10061175 A1.
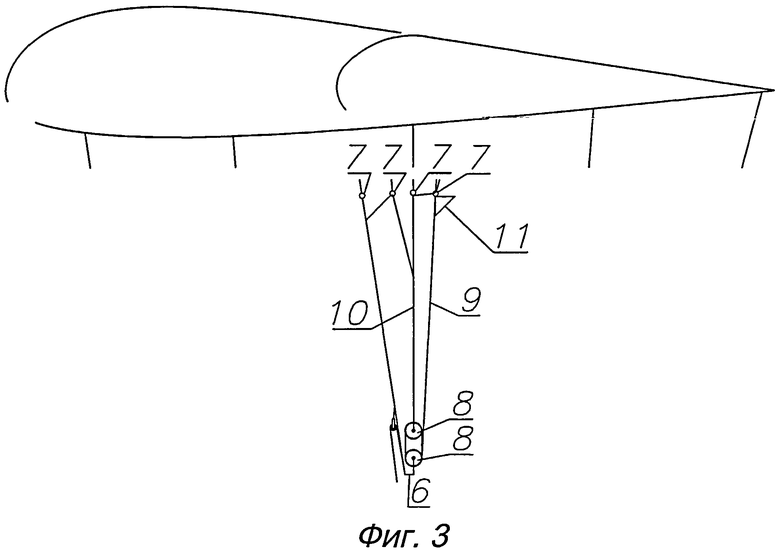
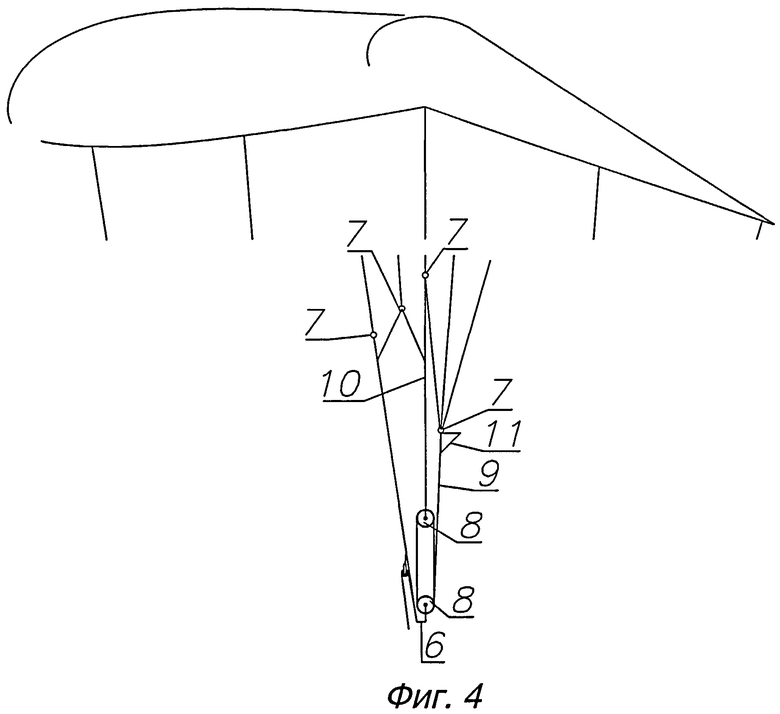
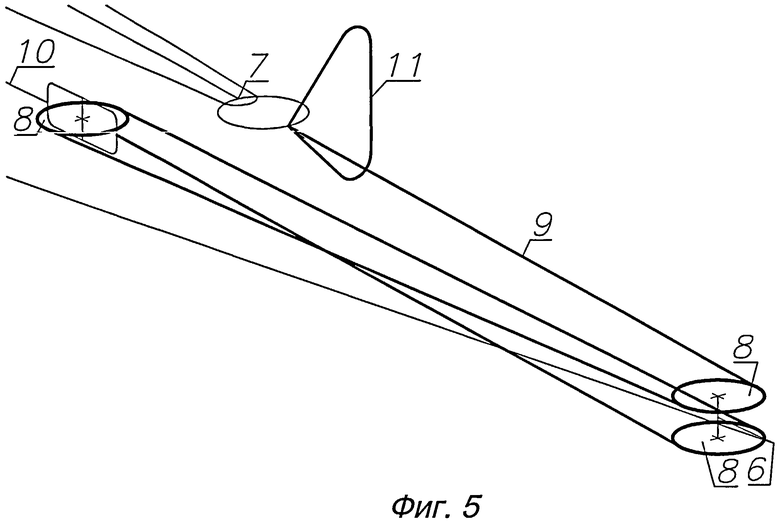
Свободные концы с компенсацией управляющего усилия, представленные на Фиг.3, Фиг.4 и Фиг.5, состоящие из свободных концов с петлями подцепки подвесной системы 6 внизу и петлями крепления строп 7 вверху, отличаются тем, что на среднем свободном конце 10 установлен полиспастный механизм 8, имеющий один или несколько блоков, и соединенный с задним свободным концом 9 так, что при втягивании заднего свободного конца в полиспастный механизм средний свободный конец 10 за счет работы полиспаста удлиняется.
В показанных на Фиг.3, Фиг.4 и Фиг.5 кинематических схемах клевантные стропы пробрасываются через петли крепления строп задних свободных концов и крепятся к петлям крепления строп средних свободных концов, что позволяет сохранять форму профиля задней отклоняемой поверхности крыла при его изгибе, не мешая работе клевант. В местах проброса клевантных строп через петли крепления строп задних свободных концов для снижения трения можно устанавливать роликовые блочки и пробрасывать клевантные стропы через них.
Свободные концы с компенсацией управляющего усилия позволяют с меньшими энергетическими затратами изменять режим тяги мягкого привязного крыла - летающего паруса, используемого в качестве движителя судов и других транспортных средств, а также в качестве лопасти ветрогенератора. В первом случае в режиме высокой тяги крыло на высокой скорости описывает восьмерки поперек потока, в режиме средней тяги - с максимально изогнутым профилем центрируется по потоку, в режиме малой тяги - с распрямленным профилем центрируется по потоку, в режиме удержания при малом ветре профиль крыла принудительно циклически распрямляется и изгибается, получая при этом дополнительную пропульсивную тягу. Во втором случае привязные крылья могут, к примеру, крепиться на тросах к движущемуся по подвесной дороге замкнутому тяговому тросу, в свою очередь, передающему движение, генератору. Тогда на убегающем по ветру участке подвесной дороги выгодно заставить привязные крылья совершать быстрые движения поперек потока (описывать восьмерки или круги при использовании вертлюгов), а на набегающем на ветер участке - заставить крылья медленно двигаться вдоль тягового троса.
Свободные концы с компенсацией управляющего усилия могут оказаться полезными не только на привязных, но и на свободнолетающих летательных аппаратах с мягким крылом, поскольку необходимость в изменении кривизны профиля крыла для поворота, изменения высоты и скорости полета присутствует и в том, и в другом случае. С помощью свободных концов с компенсацией управляющего усилия можно уменьшить потребную мощность приводов управления, в том числе в системах посадки космических спускаемых аппаратов и в системах десантирования на базе планирующих парашютов с мягким крылом.
При оснащении пилотируемого аппарата свободными концами данного типа управление им может осуществляется, помимо подтягивания клевант, также подтягиванием задних свободных концов 9 ручками 11. При оснащении ручек 11 зажимами, прижимающими задний свободный конец к среднему при отпущенных ручках, можно фиксировать необходимую кривизну крыла без поддерживающих усилий пилота.
Для стабилизации привязного крыла с балансировочным грузом в показанных местах крепления ручек прикрепляются концы управляющих строп, а к петлям подцепки подвесной системы 6 прикрепляется вилка удерживающего троса.
Трансформация усилия в полиспастном механизме обеспечивает компенсацию вытягивающего полиспаст усилия от передней части крыла стягивающим полиспаст усилием от задней части крыла. Выбором координаты крепления на профиле строп, соединенных со средним свободным концом (ближе к носку профиля или дальше от него), подбором количества блоков полиспастного механизма и креплением строп законцовок крыла ("ушей") к тем или иным рядам свободных концов можно добиться малого превышения стягивающего полиспаст усилия над растягивающим, обеспечив тем самым устойчивость формы профиля крыла совместно с малым усилием на увеличение его кривизны.
При этом укорачиванием концов управляющих строп привязного крыла будет возможно регулировать кривизну его профиля, а значит, режим тяги, например радиокомандами с земли воздействуя на механизм подмотки управляющих строп, размещенный в балансирном грузе. Питание этого механизма можно обеспечить, например, от мини-ветрогенератора, установленного на балансирном грузе. В случае оснащения механизма подмотки управляющих строп упругим кинематическим звеном появляется возможность демпфирования крылом порывов ветра путем уменьшения кривизны своего профиля при усилении ветра и увеличения кривизны профиля при его ослаблении.
При подводе к привязному крылу описанной конструкции дополнительной энергии путем периодического натяжения и ослабления удерживающего троса колебания натяжения троса будут приводить к колебанию крыла с синхронными колебаниями его кривизны. Это может привести к увеличению тяги и подъемной силы привязного крыла.
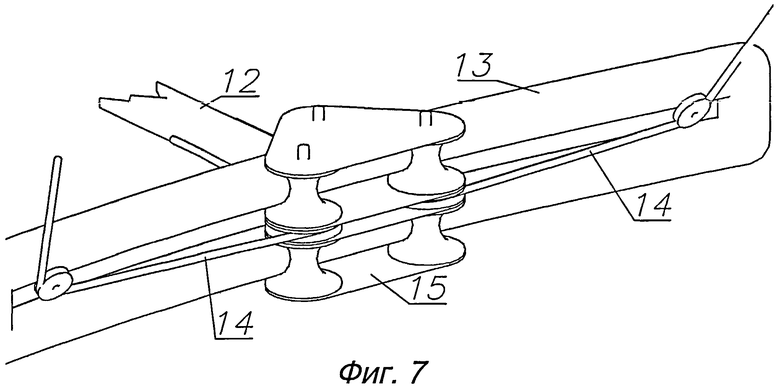
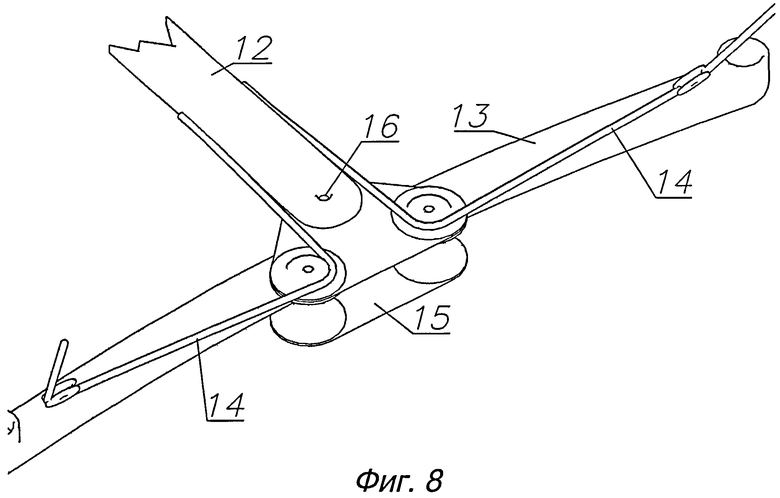
В случае если привязное крыло несет массивную полезную нагрузку и управляется по углу атаки укорочением передних рядов, обеспечить дифференциальное управление длиной передних рядов может конструкция, показанная на Фиг.6, Фиг.7 и Фиг.8, имеющая буксировочный поводок с механизмом расцепки 12, звено передачи усилия от буксировочного поводка к петлям подцепки подвесной системы 13 и строп полиспастного механизма акселератора 14, вытянутых примерно на половину хода акселератора при натянутом буксировочном поводке, отличающаяся тем, что звено передачи усилия от буксировочного поводка к петлям подцепки подвесной системы выполнено жестким и имеет форму, близкую к дуге окружности с центром, лежащим сзади и сверху от центра тяжести полезной нагрузки. На этом жестком звене установлена роликовая направляющая 15 с узлом крепления буксировочного поводка 16. Роликовая направляющая имеет возможность перекатываться по жесткому звену, увлекая за собой концы строп полиспастного механизма акселератора так, что стропа с одного конца подтягивается, а с другого - отпускается.
Предлагаемая конструкция приводит к такой реакции подвески, как будто буксировочный поводок закреплен в мнимой точке, являющейся центром дуги образующей жесткого звена передачи усилия от буксировочного поводка к петлям подцепки. Данная реакция проявляется в том, что буксируемая система меньше стремится изменить направление своего движения под действием изменившегося направления действия буксирующего троса и легче сохраняет вертикаль под действием груза, подвешенного к петлям подцепки подвесной системы. При этом изменившееся направление действия буксирующего троса приводит к перекатыванию роликовой направляющей в сторону набегающей на трос консоли крыла, прослаблению стропы полиспастного механизма акселератора на стороне набегающей на трос консоли крыла, что, в свою очередь, приводит к увеличению угла атаки этой консоли, ее приподнятию и торможению. На удаляющейся консоли происходит обратная картина, ее угол атаки уменьшается, она опускается и ускоряется. Описанный процесс приводит к довороту буксируемой системы на трос с сохранением ее устойчивости относительно горизонта.
Подвеска с жестким дугообразным звеном передачи усилия от буксировочного поводка к петлям подцепки подвесной системы и подвижной направляющей поводка может оказаться полезной, например, при буксировке планирующих летательных аппаратов с мягким крылом на высоту отцепки с помощью наземной лебедки. Уменьшение угла атаки при буксировке и автоматический доворот крыла на трос могли бы уменьшить эксплуатационные нагрузки на крыло и увеличить безопасность буксировки.
Краткое описание чертежей.
На фигурах 1, 2 изображены:
1 - балансировочный груз;
2 - гибкая или жесткая направляющая;
3 - концы управляющих строп;
4 - направляющие блоки;
5 - удерживающий трос.
На фигурах 3, 4, 5 изображены:
6 - петли подцепки подвесной системы;
7 - петли крепления строп;
8 - полиспастный механизм;
9 - задний свободный конец;
10 - средний свободный конец;
11 - ручки.
На фигурах 6, 7, 8 изображены:
12 - буксировочный поводок с механизмом расцепки;
13 - звено передачи усилия от буксировочного поводка к петлям подцепки подвесной системы;
14 - стропы полиспастного механизма акселератора;
15 - роликовая направляющая;
16 - узел крепления буксировочного поводка.

Группа изобретений относится к области авиации. В первом варианте подвеска полого мягкого привязного крыла оснащена балансировочным грузом, который продет через направляющую, закрепленную между узлами крепления строп так, что может скользить по ней. К балансировочному грузу прикреплены концы управляющих строп. Во втором варианте подвеска полого мягкого крыла оснащена петлями подцепки подвесной системы внизу и свободными концами с петлями крепления строп вверху. На среднем свободном конце подвески установлен полиспастный механизм, соединенный с задним свободным концом так, что при втягивании заднего свободного конца в полиспастный механизм средний свободный конец за счет работы полиспаста удлиняется. В третьем варианте подвеска полого мягкого привязного крыла имеет буксировочный поводок, звено передачи усилия от буксировочного поводка к петлям подцепки подвесной системы, а также полиспастный механизм акселератора. Звено передачи усилия от буксировочного поводка к петлям подцепки подвесной системы выполнено жестким и имеет форму, близкую к дуге окружности с центром, лежащим сзади и сверху от центра тяжести полезной нагрузки. На жестком звене подвижно установлена направляющая с узлом крепления буксировочного поводка. Концы строп полиспастного механизма акселератора закреплены на буксировочном поводке. Группа изобретений направлена на уменьшение усилий для управления крылом. 3 н.п. ф-лы, 8 ил.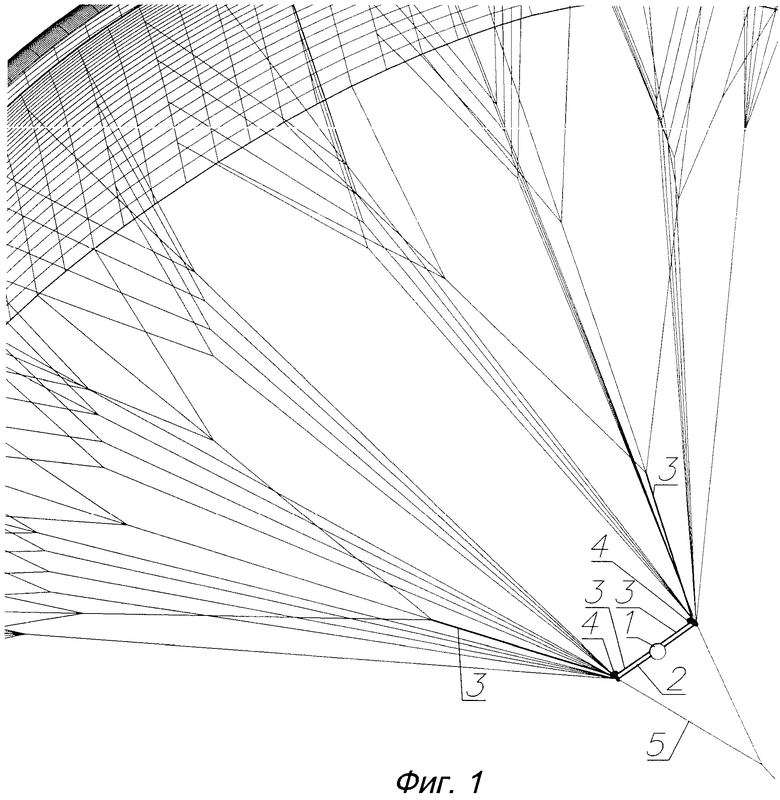
1. Подвеска полого мягкого привязного крыла, оснащенная балансировочным грузом, отличающаяся тем, что балансировочный груз продет через направляющую, закрепленную между узлами крепления строп так, что может скользить по ней, при этом к балансировочному грузу прикреплены концы управляющих строп.
2. Подвеска полого мягкого крыла с петлями подцепки подвесной системы внизу, а также свободными концами с петлями крепления строп вверху, отличающаяся тем, что на ее среднем свободном конце установлен полиспастный механизм, соединенный с задним свободным концом так, что при втягивании заднего свободного конца в полиспастный механизм средний свободный конец за счет работы полиспаста удлиняется.
3. Подвеска полого мягкого привязного крыла, имеющая буксировочный поводок, звено передачи усилия от буксировочного поводка к петлям подцепки подвесной системы, а также полиспастный механизм акселератора, отличающаяся тем, что звено передачи усилия от буксировочного поводка к петлям подцепки подвесной системы выполнено жестким и имеет форму, близкую к дуге окружности с центром, лежащим сзади и сверху от центра тяжести полезной нагрузки, при этом на жестком звене подвижно установлена направляющая с узлом крепления буксировочного поводка, а концы строп полиспастного механизма акселератора закреплены на буксировочном поводке.
| US 20070120004 A1, 31.05.2007 | |||
| DE 10061175 A1, 27.06.2002 | |||
| ПЛАНИРУЮЩИЙ ПАРАШЮТ | 2007 |
|
RU2339546C2 |
| DE 10320588 A1, 25.11.2004. | |||

