Настоящее изобретение относится к приводу ходового винта, в частности, для перемещения компонента самолета.
Приводы ходовых винтов известны в различных вариантах выполнения. Они инициируют поступательное движение либо ходового винта, либо соединенной с ним гайки для инициирования линейного перемещения компонента.
В частности, при управлении компонентами самолета важным является обеспечение того, чтобы даже в случае неисправности детали привода ходового винта была гарантирована управляемость самолетом и чтобы дефектный исполнительный орган полностью или, по меньшей мере, частично оставался работоспособным в течение оставшегося времени полета.
В основе предложенного на рассмотрение изобретения лежит задача создания привода ходового винта, который выполняет эту задачу и который в случае неисправности в цепи нагрузки делает возможным управление с помощью другой цепи нагрузки, и посредством этого осуществляется предупреждение о том, что наступил такой случай неисправности.
Эта задача решена посредством привода ходового винта, охарактеризованного признаками пункта 1 формулы изобретения.
Предусмотрено, что привод ходового винта содержит первую цепь нагрузки, образованную посредством ходового винта, и вторую цепь нагрузки, образованную посредством подвергающегося воздействию скручивания сплошного торсиона, который расположен в ходовом винте и соединен с ним таким образом, что на ходовой винт, по меньшей мере, в одном положении привода посредством сплошного торсиона оказывается воздействие, инициирующее вращательное движение, причем, по меньшей мере, в одной зоне ходового винта расположено сенсорное устройство, которое регистрирует относительное перемещение между ходовым винтом и сплошным торсионом. В случае неисправности, то есть при отказе первой или второй цепи нагрузки, происходит относительное перемещение между ходовым винтом и сплошным торсионом, которое непосредственно или опосредованно регистрируется сенсорным устройством.
Сплошной торсион в зоне, предпочтительно в концевой зоне резьбового привода, без возможности вращения, а также с предохранением от аксиального смещения может быть соединен с ходовым винтом. Такое соединение может быть осуществлено, к примеру, посредством болта, штифта или т.п.
Далее может быть предусмотрено, что сплошной торсион в зоне, предпочтительно концевой зоне резьбового привода, посредством клинообразного участка соединен с ходовым винтом, через который может передаваться крутящий момент между сплошным торсионом и ходовым винтом. Сплошной торсион в зоне, предпочтительно в концевой зоне, посредством кольца для поглощения аксиальных усилий соединен с ходовым винтом.
Если происходит отказ первой цепи нагрузки, то крутящий момент передается через клинообразный участок, а аксиальные усилия через кольцо.
Сенсорное устройство может быть соединено с зоной, предпочтительно с концевой зоной ходового винта, таким образом, что оно может аксиально смещаться с ходовым винтом. Таким образом, возможно, что в случае неисправности происходит аксиальное смещение ходового винта, а тем самым и сенсорного устройства, которое затем регистрируется сенсорным устройством.
Сенсорное устройство предпочтительно выполнено без возможности вращения.
Ходовой винт может быть сформирован таким образом, что в нормальном режиме работы привода ходового винта он гарантирован от прокручивания.
В предпочтительном варианте выполнения изобретения сплошной торсион соединен с ходовым винтом или с сенсорным устройством посредством пружины, которая оказывает действующее в аксиальном направлении усилие. Пружина является нажимной пружиной.
Сплошной торсион может быть сформирован с предварительным натяжением таким образом, что вызванное вследствие этого вращательное движение ходового винта осуществляется в таком направлении, что происходит сжатие пружины. Этот случай может иметь место, к примеру, тогда, когда происходит отказ ходового винта в зоне под гайкой. В этом случае аксиально перемещаемый конец ходового винта посредством сплошного торсиона переводится во вращательное движение, в результате чего имеет место относительное перемещение между ходовым винтом и гайкой. За счет аксиального перемещения аксиально перемещаемого конца ходового винта пружина сжимается.
Сенсорное устройство может регистрировать перемещение поршня или т.п., причем поршень расположен таким образом, что при относительном перемещении между сплошным торсионом и ходовым винтом он перемещается. Сенсорное устройство может иметься в однократном или многократном количестве и может иметь, к примеру, один или, из соображений резервирования, два или более датчиков на основе дифференциального трансформатора LVDT (linear variable displacement transducer), который активируется посредством поршня или регистрирует его смещение.
Поршень при нормальном режиме работы резьбового привода может быть расположен в пазу сплошного торсиона, а в случае неисправности может перемещаться в радиальном направлении к сплошному торсиону.
В предпочтительном варианте выполнения сплошной торсион имеет длину, которая превышает длину резьбового штока.
Далее может быть предусмотрено, что привод ходового винта соединен с переменным в своем положении компонентом, к примеру с рулем, дверцей и т.п., летательного аппарата, в частности самолета.
Изобретение относится также к летательному аппарату, по меньшей мере, с одним приводом ходового винта по любому из пунктов 1-14 формулы изобретения.
Понятия привод ходового винта, ходовой винт и гайка могут быть широко истолкованы и включают в себя традиционный привод ходового винта, при котором гайка с резьбой находится в зацеплении с резьбовым штоком. Он содержит, однако, также и любые другие приводы ходового винта, которые работают с роликами, вальцами и проч., а также и те, в которых ролики, вальцы и проч. рециркулируют, как, к примеру, приводы шариковых винтов с циркуляцией шариков или роликовые резьбовые ходовые винты.
Другие детали и преимущества изобретения разъясняются более подробно на основании представленного на чертеже примера выполнения изобретения.
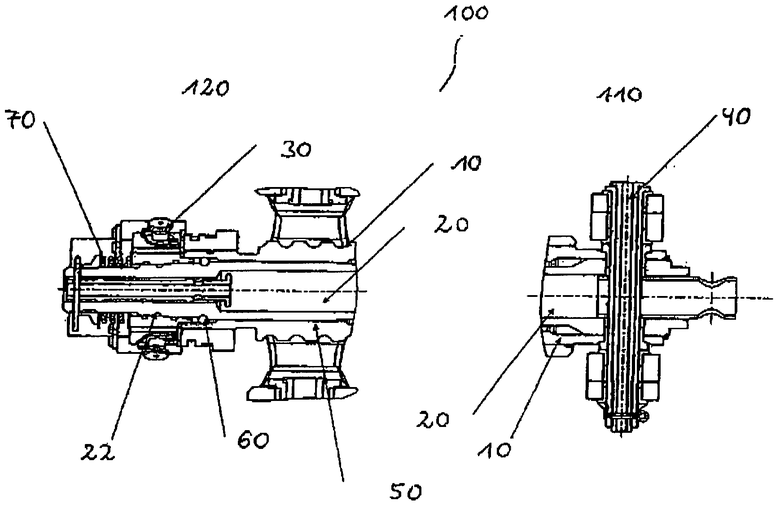
Настоящее изобретение поясняется единственной фигурой, на которой представлены обе концевые зоны резьбового привода в соответствии с предложенным на рассмотрение изобретением.
Под приводом 100 ходового винта в соответствии с предложенным на рассмотрение изобретением подразумевается линейный исполнительный орган для инициирования движения компонента, к примеру, самолета. Он может располагаться между структурой самолета и, к примеру, выполненной с возможностью перемещения панелью или т.п.
Привод 100 ходового винта содержит сенсорное устройство 30, а также последовательно подключенную структуру, которая позволяет регистрировать отказ первичной, а также вторичной цепей нагрузки.
Для перемещения упомянутых компонентов может служить либо гайка, либо ходовой винт. Оба случая рассмотрены в рамках изобретения.
Привод 100 ходового винта содержит первичную цепь нагрузки, образованную посредством ходового винта 10, выполненного в виде резьбового штока, который на своей наружной стороне имеет резьбу или т.п., в зацеплении с которой находится не изображенная более детально гайка. Когда гайка или ходовой винт 10, выполненный в виде резьбового штока, приводятся во вращательное движение, то происходит относительное перемещение обоих элементов, в результате чего инициируется линейное перемещение исполнительного органа.
Указанный резьбовой шток является пустотелым и содержит в своем внутреннем пространстве сплошной торсион 20. Сплошной торсион 20 образует вторичную цепь нагрузки.
В концевой зоне 110 сплошной торсион 20 посредством болта 40 соединен с резьбовым штоком. Болт 40 проходит через радиальные отверстия в указанном резьбовом штоке, а также в сплошном торсионе 20 и таким образом предохраняет в этой концевой зоне 110 указанный резьбовой шток и сплошной торсион 20 от относительных перемещений в аксиальном направлении, а также в направлении вращения.
В другой концевой зоне 120 сплошной торсион 20 и ходовой винт 10, выполненный в виде резьбового штока, соединены друг с другом посредством клинообразного участка 50, который выполнен таким образом, что крутящий момент от сплошного торсиона 20 может передаваться на указанный резьбовой шток, если должен произойти отказ первой цепи нагрузки. Кольцо 60, расположенное между сплошным торсионом 20 и указанным резьбовым штоком, обеспечивает в данном случае передачу аксиальных усилий.
При монтаже сплошной торсион 20 с кручением вставляется в указанный резьбовой шток таким образом, что имеет место крутящий момент между резьбовым штоком и сплошным торсионом 20. Направление этого момента таково, что имеет место свинчивание гайки с резьбового штока при отказе первой цепи нагрузки.
Как изложено выше, в концевой зоне резьбового штока, в которой этот резьбовой шток посредством клинообразного участка 50 соединен со сплошным торсионом 20, находится сенсор 30. В нормальном режиме работы резьбового привода 100 в пазу 22 сплошного торсиона 20 находится не изображенный, выполненный с возможностью перемещения в радиальном направлении к сплошному торсиону 20 поршень.
Как очевидно далее на основании чертежа, сплошной торсион 20 в своей конечной зоне усилием пружины 70 нагружен в направлении резьбового штока и сенсора 30.
Если происходит отказ ходового винта 10, выполненного в виде резьбового штока, в зоне между гайкой и точкой соединения между ходовым винтом 10 и перемещаемым компонентом, то образующиеся за счет воздушного потока, воздействующие на компонент усилия приводят к тому, что обе отделенные друг от друга части ходового винта 10 перемещаются в направлении друг от друга. Это относительное перемещение приводит к тому, что изображенный на фигуре слева аксиально свободно перемещаемый конец ходового винта 10, а также сенсор 30 аксиально (в соответствии с фигурой - влево) перемещаются относительно сплошного торсиона 20, в результате чего пружина 70 сжимается. В результате этого поршень сенсора 30 аксиально и перпендикулярно сплошному торсиону 20 перемещается в направлении от него, так как выталкивается из паза 22 в сплошном торсионе 20. Это перемещение поршня регистрируется сенсорным устройством, и может быть выдан соответствующий сигнал.
Если происходит отказ ходового винта 10, выполненного в виде резьбового штока, в зоне под гайкой, резьбовой шток посредством сплошного торсиона 20 переводится во вращательное движение, причем резьбовой шток «отводится» от гайки. Это относительное перемещение приводит к тому, что аксиально свободно перемещаемый конец резьбового штока, а также сенсорное устройство 30 аксиально (в соответствии с фигурой - влево) перемещается относительно сплошного торсиона 20, в результате чего пружина 70 сжимается. В результате этого, поршень сенсора 30 аксиально и перпендикулярно сплошному торсиону 20 перемещается в направлении от него, так как выталкивается из паза 22 в сплошном торсионе 20. Это перемещение поршня регистрируется сенсором, и может быть выдан соответствующий сигнал.
Если ходовой винт 10, выполненный в виде резьбового штока, отказывает вне воздействия усилий на перемещаемый компонент, то в первом случае может иметь место ситуация, когда разрыв проходит не перпендикулярно оси ходового винта. В этом случае создаваемый сплошным торсионом 20 крутящий момент инициирует аксиальное перемещение указанного резьбового штока относительно сплошного торсиона 20. Аксиально свободно перемещаемая часть резьбового штока совместно с сенсором 30 перемещается относительно сплошного торсиона 20, в результате чего происходит сжатие пружины 70. Как изложено выше, вызванное в результате этого перемещение поршня регистрируется сенсором 30.
Если во втором случае происходит разрыв резьбового штока перпендикулярно оси ходового винта, скручивание сплошного торсиона 20 приводит к вращательному движению отказавшей части резьбового штока относительно сплошного торсиона 20. Перемещение резьбового штока относительно гайки приводит к тому, что гайка смещает аксиально свободно перемещаемую часть резьбового штока, в результате чего этот участок ходового винта 10, а также сенсор 30 аксиально перемещаются к сплошному торсиону 20. Как изложено выше, в данном случае происходит сжатие пружины 70, а также перемещение поршня из паза 22 сплошного торсиона 20, что регистрируется сенсором 30.
Наконец, если происходит отказ сплошного торсиона 20, то торсионный момент исчезает. В этом случае пружина 70 в концевой зоне 120 привода 100 ходового винта протягивает отделенную зону сплошного торсиона 20 через сенсор 30, в результате чего инициируется относительное перемещение между сплошным торсионом 20 и сенсором 30. Это приводит к описанному выше перемещению поршня, которое регистрируется сенсором 30.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ХОДОВОГО ВИНТА | 2010 |
|
RU2524255C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СКОРОСТЬЮ ПОДАЧИ ДОЗЫ И ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2014 |
|
RU2652871C2 |
| Приводное устройство для перемещения подвижной части мебели, а также фурнитурная система и мебель с таким приводным устройством | 2020 |
|
RU2754411C1 |
| Устройство для контроля изделий | 1991 |
|
SU1826060A1 |
| АКТИВНОЕ НАТЯЖНОЕ УСТРОЙСТВО | 2003 |
|
RU2296896C2 |
| СЪЕМНИК ПЯТНИКА ВАГОНА | 2009 |
|
RU2405691C2 |
| ИСПЫТАТЕЛЬНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ КОНТРОЛЬНОГО УСТРОЙСТВА РУЛЕВОГО ПРИВОДА САМОЛЕТА | 2018 |
|
RU2760777C2 |
| ТЕЛЕЖКА ДЛЯ ПЕРЕВОЗКИ РЕЛЬСОВЫХ ПЛЕТЕЙ | 1999 |
|
RU2149939C1 |
| Устройство для сварки панелей с сотовым заполнителем | 1980 |
|
SU1245254A3 |
| ОДНОРАЗОВЫЙ ЗАГРУЗОЧНЫЙ МОДУЛЬ С ПРИВОДОМ ОТ ЭЛЕКТРОДВИГАТЕЛЯ ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ОТРЕЗНЫМ И СШИВАЮЩИМ СКОБКАМИ АППАРАТОМ | 2009 |
|
RU2506909C2 |
Изобретение относится к области авиации, более конкретно к приводу ходового винта. Привод содержит первую цепь нагрузки, образованную посредством ходового винта, и вторую цепь нагрузки, образованную посредством выполненного с возможностью скручивания сплошного торсиона, который расположен в ходовом винте и соединен с ним. При этом в одном положении привода сплошной торсион выполнен с возможностью воздействия на ходовой винт для инициирования вращательного движения, причем привод ходового винта содержит сенсор, предназначенный для регистрации относительного перемещения между шпинделем и сплошным торсионом. Технический результат заключается в повышении надежности работы ходового винта. 2 н. и 13 з.п. ф-лы, 1 ил.
1. Привод (100) ходового винта, содержащий первую цепь нагрузки, образованную посредством ходового винта (10), и вторую цепь нагрузки, образованную посредством выполненного с возможностью скручивания сплошного торсиона (20), который расположен в ходовом винте (10) и соединен с ним, причем, по меньшей мере, в одном положении привода (100) сплошной торсион (20) выполнен с возможностью воздействия на ходовой винт (10) для инициирования вращательного движения, причем привод (100) ходового винта содержит сенсор (30), предназначенный для регистрации относительного перемещения между ходовым винтом (10) и сплошным торсионом (20).
2. Привод (100) ходового винта по п.1, отличающийся тем, что сплошной торсион (20) в зоне, предпочтительно в концевой зоне (110) привода (100), соединен с ходовым винтом (10) с фиксацией от вращения и аксиального смещения.
3. Привод (100) ходового винта по п.1 или 2, отличающийся тем, что сплошной торсион (20) соединен с ходовым винтом (10) посредством болта (40), фиксирующего ходовой винт (10) и сплошной торсион (20) в аксиальном направлении и в направлении вращения относительно друг друга.
4. Привод (100) ходового винта по п.1 или 2, отличающийся тем, что сплошной торсион (20) в зоне, предпочтительно в концевой зоне (120) привода (100), посредством клинообразного соединительного участка (50) соединен с ходовым винтом (10), через который может передаваться крутящий момент между сплошным торсионом (20) и ходовым винтом (10).
5. Привод (100) ходового винта по п.1 или 2, отличающийся тем, что сплошной торсион (20) в зоне, предпочтительно в концевой зоне (120), посредством кольца (60) для поглощения аксиальных усилий соединен с ходовым винтом (10).
6. Привод (100) ходового винта по п.1 или 2, отличающийся тем, что сенсор (30) соединен с зоной, предпочтительно с концевой зоной ходового винта (10), и выполнен с возможностью аксиального смещения с ходовым винтом (10).
7. Привод (100) ходового винта по п.1 или 2, отличающийся тем, что сенсор (30) установлен с фиксацией от вращения.
8. Привод (100) ходового винта по п.1 или 2, отличающийся тем, что сплошной торсион (20) соединен с ходовым винтом (10) или с сенсором (30) посредством пружины (70), действующей в аксиальном направлении.
9. Привод (100) ходового винта по п.8, отличающийся тем, что пружина (70) выполнена в виде нажимной пружины (70).
10. Привод (100) ходового винта по п.8, отличающийся тем, что инициируемое посредством сплошного торсиона (20) вращательное движение ходового винта (10) осуществляется в заданном направлении, при этом осуществляется сжатие пружины (70).
11. Привод (100) ходового винта по п.1 или 2, отличающийся тем, что сенсор (30) предназначен для регистрирования перемещения поршня или т.п., причем поршень выполнен с возможностью перемещения между сплошным торсионом (20) и ходовым винтом (10).
12. Привод (100) ходового винта по п.11, отличающийся тем, что поршень при нормальном рабочем режиме расположен в пазу (22) сплошного торсиона (20), а в случае неисправности перемещается в радиальном направлении к сплошному торсиону (20).
13. Привод (100) ходового винта по п.1 или 2, отличающийся тем, что сплошной торсион (20) имеет длину, которая превышает длину ходового винта (10).
14. Привод (100) ходового винта по п.1 или 2, отличающийся тем, что привод (100) ходового винта соединен с изменяющимся в своем положении компонентом летательного аппарата, в частности самолета.
15. Летательный аппарат, в частности самолет, по меньшей мере, с одним приводом (100) ходового винта по любому из пп.1-14.
| УСТРОЙСТВО, ГЕНЕРИРУЮЩЕЕ АЭРОЗОЛЬ, С УПЛОТНЕННЫМ ВНУТРЕННИМ КАНАЛОМ ДЛЯ ПОТОКА ВОЗДУХА | 2021 |
|
RU2839352C2 |
| EP 1398542 A1, 17.03.2004 | |||
| Способ определения высоты зоны водопроводящих трещин | 1985 |
|
SU1283384A1 |
| СПОСОБ ПОДДЕРЖАНИЯ ЧИСЛА ОБОРОТОВ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА В ДОПУСТИМЫХ ПРЕДЕЛАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231479C2 |

