Настоящее изобретение относится к снегоуборочной машине, содержащей узел лебедки для облегчения управления снегоуборочной машиной на крутых склонах.
Более конкретно, снегоуборочная машина содержит раму, блок управления и упомянутый узел лебедки, который содержит опорную конструкцию, закрепленную на раме, барабан, который вращается относительно опорной конструкции вокруг оси, трос, намотанный вокруг барабана, и узел силового привода для вращения барабана вокруг оси.
Известные снегоуборочные машины обычно также содержат подметальный валик для чистки снежной поверхности горнолыжных склонов и механическую лопату для перемещения массы снега вдоль горнолыжных склонов. Во время работы снегоуборочной машины на особенно крутых горнолыжных склонах свободный конец троса узла лебедки закреплен на направленной вверх анкерной опоре для маневрирования снегоуборочной машиной с помощью узла лебедки для обеспечения большей безопасности и предотвращения буксования снегоуборочной машины в случае потери силы сцепления.
Однако известные снегоуборочные машины не обеспечивают соответствующее управление тросом.
В CA 2441650, например, описана снегоуборочная машина, содержащая узел лебедки, который, в свою очередь, содержит устройство для направления троса, содержащее подвижные рычаги, приводимые в действие тросом. Подвижные рычаги приводят в действие силовой привод для перемещения устройства для направления троса перед барабаном для правильного наматывания/разматывания троса относительно барабана.
Снегоуборочная машина в CA 2441650 не устраняет недостатки, обусловленные случайными отклонениями троса, которые могут привести к неисправной работе узла лебедки и снегоуборочной машины в целом. Кроме того, рычаги могут заклиниваться и вызывать несоответствующее перемещение устройства для направления троса.
Снегоуборочная машина в CA 2441650 также не выполняет функций кроме позиционирования троса относительно барабана, причем все недостатки относятся к вышеупомянутому.
Задачей настоящего изобретения является создание снегоуборочной машины, в которой устранены недостатки известного уровня техники.
Другой задачей настоящего изобретения является создание снегоуборочной машины, в которой усовершенствовано управление тросом.
В соответствии с настоящим изобретением описана снегоуборочная машина, содержащая узел лебедки для облегчения управления снегоуборочной машиной на крутых склонах, причем снегоуборочная машина содержит раму, блок управления и упомянутый узел лебедки, который содержит опорную конструкцию, закрепленную на раме, барабан, который вращается относительно опорной конструкции вокруг оси, трос, намотанный вокруг барабана, узел силового привода для вращения барабана вокруг оси и датчик для определения положения барабана вокруг оси, причем блок управления выполнен с возможностью управления тросом в зависимости от положения барабана и геометрии барабана.
Таким образом, можно регулировать фактическую длину троса, намотанного/размотанного на/с барабана, и определять площадь барабана, на которую трос наматывается/разматывается, и, следовательно, положение, которое должен занимать трос относительно барабана, особенно при намотке троса.
В предпочтительном варианте осуществления настоящего изобретения узел лебедки содержит устройство для направления троса, перемещаемое относительно барабана для размещения троса в заданном положении относительно барабана, и силовой привод для перемещения устройства для направления троса относительно барабана, причем упомянутый блок управления выполнен с возможностью расчета положения упомянутого устройства для направления троса в зависимости от положения барабана и геометрии барабана и управления силовым приводом в зависимости от расчетного положения.
Таким образом, трос правильно наматывается и разматывается по винтовой линии вокруг барабана.
В другом предпочтительном варианте осуществления настоящего изобретения узел лебедки содержит, по меньшей мере, один натяжной шкив, который расположен в контакте с упомянутым тросом и вращается за счет упомянутого троса, и датчик для определения положения натяжного шкива, причем устройство управления выполнено с возможностью получения скорости вращения барабана и скорости вращения натяжного шкива и управления узлом силового привода в зависимости от скорости вращения барабана, скорости вращения натяжного шкива, положения барабана и геометрии натяжного шкива и барабана.
Таким образом, можно определять правильное натяжение троса. Если трос не натянут должным образом, он теряет силу сцепления с натяжным шкивом, который, следовательно, не вращается вокруг своей оси. Если трос не натянут, он может перематываться неправильно или даже автоматически разматываться с барабана вследствие своей собственной упругости.
Другой целью настоящего изобретения является создание способа приведения в действие узла лебедки снегоуборочной машины.
В соответствии с настоящим изобретением описан способ приведения в действие узла лебедки для облегчения управления снегоуборочной машиной на крутых склонах, причем узел лебедки содержит опорную конструкцию, барабан, который вращается относительно опорной конструкции вокруг оси, и трос, намотанный вокруг барабана, причем способ включает в себя этапы определения положения барабана вокруг оси и управления тросом в зависимости от определенного положения барабана и геометрии барабана.
Неограничивающий вариант осуществления настоящего изобретения будет описан в качестве примера со ссылкой на сопроводительные чертежи, на которых
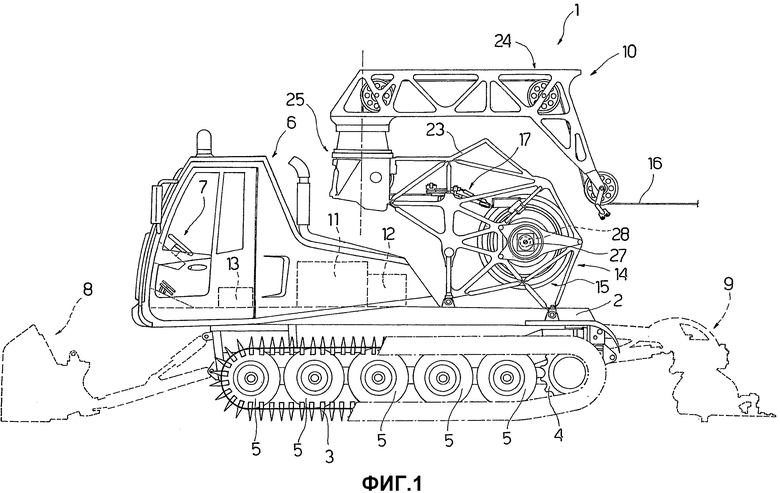
фиг.1 - вид сбоку без частей, удаленных для ясности, снегоуборочной машины в соответствии с настоящим изобретением;
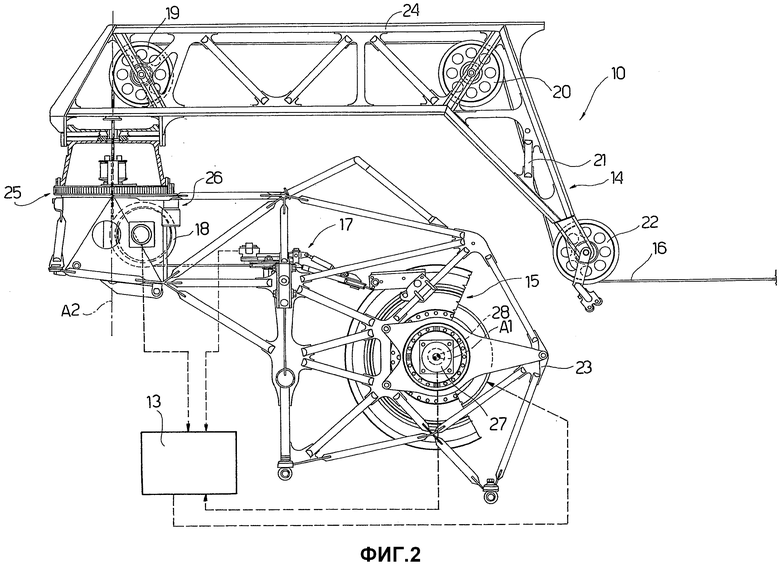
фиг.2 - вид сбоку в более крупном масштабе без частей, удаленных для ясности, отдельной части снегоуборочной машины на фиг.1;
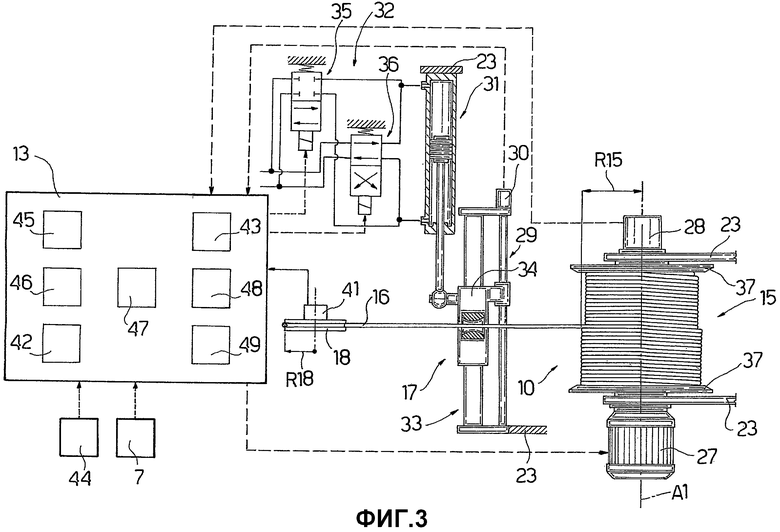
фиг.3 - частичный схематичный вид сверху без частей, удаленных для ясности, отдельной части снегоуборочной машины на фиг.1;
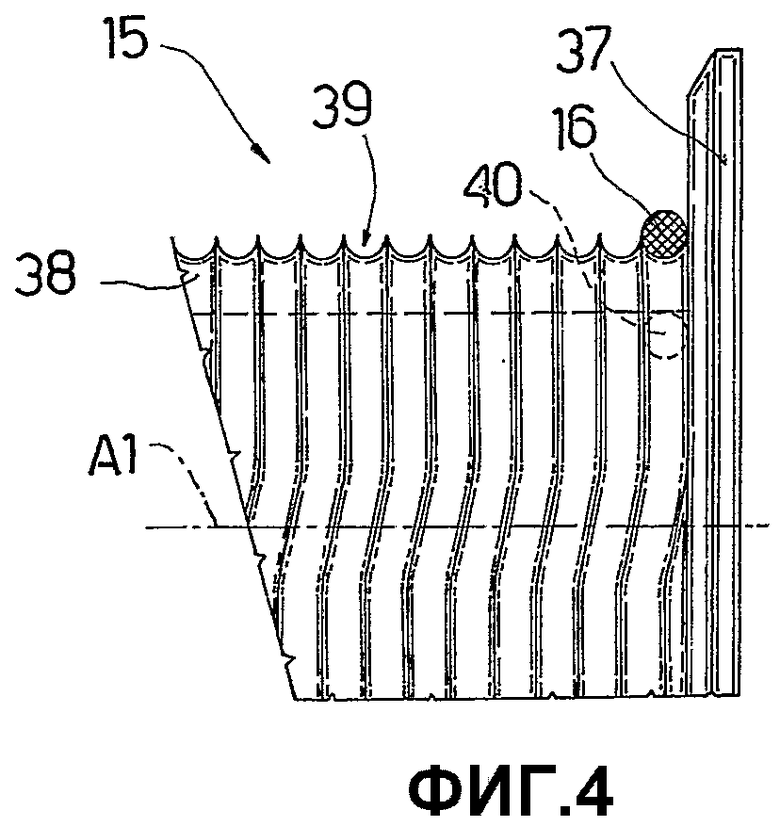
фиг.4 - вид сверху в более крупном масштабе без частей, удаленных для ясности, отдельной части снегоуборочной машины на фиг.1.
Ссылочная позиция 1 на фиг.1 обозначает в целом снегоуборочную машину для горнолыжных склонов.
Снегоуборочная машина 1 содержит раму 2, две гусеницы 3 (только одна показана на фиг.1), два ведущих колеса 4 (только одно показано на фиг.1), функционально соединенных с соответствующими гусеницами 3, паразитные колеса 5, поддерживающие гусеницы 3, кабину 6, интерфейс 7 пользователя в кабине 6, механическую лопату 8, установленную на передней стороне рамы 2, подметальный валик 9, установленный на задней стороне рамы 2, узел 10 лебедки, закрепленный на верхней стороне рамы 2, двигатель 11 внутреннего сгорания и коробку 12 передач, функционально соединенную с двигателем 11 внутреннего сгорания, ведущими колесами 4, механической лопатой 8, подметальным валиком 9 и узлом 10 лебедки. Коробка 11 передач может быть гидромеханической, электрической или их сочетанием.
Снегоуборочная машина 1 содержит устройство 13 управления, соединенное с интерфейсом 7 пользователя для управления снегоуборочной машиной 1 и узлом 10 лебедки.
Ссылаясь на фиг.1, узел 10 лебедки содержит опорную конструкцию 14, закрепленную на раме 2, барабан 15, установленный на опорной конструкции 14 для вращения вокруг оси A1, трос 16, закрепленный на одном конце с барабаном 15 и намотанный вокруг барабана 15, устройство 17 для направления троса, перемещаемое относительно барабана 15, для размещения троса 16 относительно барабана 15 при намотке/размотке троса 16 на/с барабана 15 и ряд натяжных шкивов 18, 19, 20, 21, 22, установленных с возможностью вращения в опорной конструкции 14 для направления троса 16 по заданной траектории вдоль опорной конструкции 14.
Опорной конструкцией 14 является решеточная конструкция и содержит нижний участок 23, закрепленный на раме 2 (фиг.1) и поддерживающий барабан 15, устройство 17 для направления троса и натяжной шкив 18, верхний участок 24, который вращается относительно нижнего участка 23 вокруг оси A2, поперечной оси A1, шарнир 25, расположенный между нижним участком 23 и верхним участком 24, и механизм 26 с электроприводом, функционально соединенный с шарниром 25 для селективного поворота верхнего участка 24 относительно нижнего участка 23 вокруг оси A2.
Ссылаясь на фиг.3, узел 10 лебедки содержит узел 27 силового привода, функционально соединенный с барабаном 15 для вращения барабана 15 в противоположных направлениях вокруг оси A1, датчик 28, установленный на барабане 15 для определения положения барабана 15 вокруг оси A1, направляющий механизм 29 для направления устройства 17 для направления троса, датчик 30 для определения положения устройства 17 для направления троса относительно барабана 15, силовой привод 31 для перемещения устройства 17 для направления троса относительно барабана 15 и устройство 32 управления для управления силовым приводом 31.
В примере на фиг.3 направляющий механизм 29 для направления устройства 17 для направления троса содержит направляющую 33, установленную на нижнем участке 23 и параллельную оси A1, и каретку 34, перемещаемую параллельно оси A1 по направляющей 33 и поддерживающую устройство 17 для направления троса. Силовым приводом 31 является привод линейного перемещения, в изображенном примере гидравлический цилиндр двойного действия, закрепленный на нижнем участке 23 опорной конструкции 14 и функционально соединенный с кареткой 34. Устройство 32 управления содержит два электромагнитных клапана 35 и 36.
В альтернативном варианте осуществления, не показанном на чертежах, направляющий механизм содержит рычаг типа, описанного в CA 2441650, который поддерживает устройство для направления троса и вращается вокруг оси, поперечной оси барабана.
Барабан 15 содержит два фланца 37, перпендикулярных к оси A1, и, как показано на фиг.4, цилиндрическую стенку 38, вдоль которой образована канавка 39 для вмещения троса 16, который закреплен на одном конце 40 с цилиндрической стенкой 38.
Канавка 39 проходит по винтовой линии вдоль цилиндрической стенки 38 и отличается полукруговыми участками, соединенными друг с другом, и смещенными участками, которые обеспечивают смещение в направлении, параллельном оси A1, равное половине шага канавки 39. Канавкой 39 вышеупомянутого типа обычно называется спиральная канавка типа “Lebus”.
Трос 15 наматывается по винтовой линии вокруг барабана 15. То есть первый слой троса 16 наматывается частично внутри канавки 39 и последующие слои троса 16 наматываются с тем же шагом, что и канавка 16, на первый слой.
Как показано на фиг.3, узел 10 лебедки содержит датчик 41 для определения положения натяжного шкива 18.
Блок 13 управления выполнен с возможностью управления тросом 16, в частности регулирования положения троса 16 относительно барабана 15 и натяжения троса 16, и содержит запоминающее устройство 42, в котором хранятся геометрия барабана 15 и геометрия натяжного шкива 18. Блок 13 управления выполнен с возможностью управления тросом 16 в зависимости от положения барабана 15 и геометрии барабана 15, которая включает в себя данный тип канавки 39, размеры барабана 15 и канавки 39 и количество намотанных слоев троса 16. Блок 13 управления соединен с интерфейсом 7 пользователя для ввода данных в запоминающее устройство 42.
Положение барабана 15 задано в качестве абсолютного положения относительно нулевой точки отсчета, в котором барабан 15 находится в заданном состоянии намотки, предпочтительно, с полностью намотанным тросом 16.
На основании этой информации блок 13 управления выполнен с возможностью регулирования положения устройства 17 для направления троса в зависимости от расчетного положения и, следовательно, содержит вычислительный блок 43 для расчета положения устройства 17 для направления троса относительно барабана 15.
На основании сигнала, выдаваемого датчиком 28, и геометрии барабана 15, состояние намотки барабана 15 может отображаться на дисплее 44 в кабине 6 (фиг.1).
При расчете положения устройства 17 для направления троса блок 13 управления приводит в действие устройство 32 управления для управления силовым приводом 31 для установки устройства 17 для направления троса в расчетное положение.
Блок 13 управления также содержит блок 45 сравнения для сравнения фактического положения устройства 17 для направления троса с расчетным положением. Фактическое положение определяется датчиком 30. Когда разность между фактическим положением и расчетным положением превышает заданный приемочный диапазон, блок 13 управления выполнен с возможностью корректировки фактического положения устройства 17 для направления троса.
Блок 13 управления содержит два дифференцирующих блока 46, 47 для получения скорости вращения барабана 15 и скорости вращения натяжного шкива 18 в зависимости от соответствующих положений, определенных датчиками 28 и 41, вычислительный блок 48 для преобразования скоростей вращения барабана 15 и натяжного шкива 18 в соответствующие тангенциальные скорости в зависимости от геометрии барабана 15, геометрии натяжного шкива 18 и абсолютного положения барабана 15 и блок 49 сравнения для определения того, превышает или нет разность между тангенциальными скоростями заданное пороговое значение. В этом случае блок 13 управления выполнен с возможностью остановки барабана 15, если барабан 15 разматывает трос 16.
При отсутствии проскальзывания между тросом 16 и натяжным шкивом 18 скорости, направленные по касательной к натяжному шкиву 18 и барабану, равны в соответствии с уравнением:
ω18·R18 = ω15·R15
где:
ω18 - скорость вращения натяжного шкива 18;
R18 - радиус натяжного шкива 18;
ω15 - скорость вращения барабана 15;
R15 - радиус, на который наматывается трос 16 и который, в свою очередь, является функцией абсолютного положения барабана 15.
Излагая очень кратко, сравнение может иметь вид:
ω18<K(ω15·R15)/R18, где K - приемочный коэффициент.
Регулирование натяжения троса фактически также является функцией абсолютного положения барабана 15.
Настоящее изобретение описывает снегоуборочную машину, обеспечивающую точность, а также очень гибкое управление тросом узла лебедки. Снегоуборочная машина, фактически, способна регулировать положение троса вдоль барабана при намотке и размотке троса, регулировать натяжение троса и отображать состояние намотки/размотки троса для пользователя.
Понятно, что настоящее изобретением также включает в себя варианты осуществления, не описанные в вышеприведенном подробном раскрытии, а также эквивалентные варианты осуществления в пределах объема охраны сопроводительной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СНЕГОУБОРОЧНАЯ МАШИНА | 1996 |
|
RU2143027C1 |
| ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЛЫЖНЫХ ТРАСС И СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ ДЛЯ ТАКОГО СНЕГОХОДНОГО ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2799094C2 |
| ТЯГОВОЕ ОБОРУДОВАНИЕ БРОНИРОВАННОЙ РЕМОНТНО-ЭВАКУАЦИОННОЙ МАШИНЫ И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА ЛЕБЕДКИ ТЯГОВОГО ОБОРУДОВАНИЯ | 2009 |
|
RU2408525C1 |
| УЗЕЛ ЛЕБЕДКИ ДЛЯ ПОМОЩИ В ПЕРЕМЕЩЕНИИ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ИМ | 2018 |
|
RU2771072C2 |
| Самоходная лебедка | 1987 |
|
SU1532535A1 |
| УСТРОЙСТВО ФИКСАЦИИ БУКСИРУЕМОЙ ЛИНИИ НА БАРАБАНЕ БУКСИРНОЙ ЛЕБЕДКИ | 2007 |
|
RU2351501C1 |
| ГИДРАВЛИЧЕСКАЯ ЛЕБЕДКА | 1993 |
|
RU2048424C1 |
| Ручная лебедка | 1979 |
|
SU931688A2 |
| ЛЕБЕДКА | 2011 |
|
RU2574672C2 |
| ЛЕБЕДКА | 2008 |
|
RU2393985C1 |
Изобретение относится к снегоуборочной машине. Снегоуборочная машина (1), оснащенная узлом (10) лебедки для облегчения управления снегоуборочной машиной (1) на крутых склонах, содержит раму (2), интерфейс (7) пользователя, блок (13) управления и узел (10) лебедки, который содержит опорную конструкцию (14), закрепленную на раме (2), барабан (15), который вращается относительно опорной конструкции (14) вокруг оси (A1), трос (16), закрепленный на одном конце с барабаном (15) и намотанный вокруг барабана (15), узел (27) силового привода для вращения барабана (15) вокруг оси (A1) и датчик (28) для определения положения барабана (15) вокруг оси (A1), причем блок (13) управления выполнен с возможностью управления тросом (16) в зависимости от положения барабана (15) и геометрии барабана (15). Узел (10) лебедки содержит, по меньшей мере, один натяжной шкив (18), расположенный в контакте с тросом (16) и вращающийся за счет упомянутого троса (16), и второй датчик (41) для определения положения натяжного шкива (18), причем блок (13) управления выполнен с возможностью получения скорости вращения барабана (15) и скорости вращения натяжного шкива (18) и управления узлом (27) силового привода в зависимости от скорости вращения барабана, скорости вращения натяжного шкива (18), положения барабана (15) и геометрии натяжного шкива (18) и барабана (15). Изобретение позволяет облегчить управление снегоуборочной машиной на крутых склонах. 2 н. и 8 з.п. ф-лы, 4 ил.
1. Снегоуборочная машина, содержащая узел лебедки для облегчения управления снегоуборочной машиной на крутых склонах, причем снегоуборочная машина (1) содержит раму (2), блок (13) управления и узел (10) лебедки, который содержит опорную конструкцию (14), закрепленную на раме (2), барабан (15), выполненный с возможностью вращения относительно опорной конструкции (14) вокруг оси (A1), трос (16), намотанный вокруг барабана (15), узел (27) силового привода для вращения барабана (15) вокруг оси (A1) и первый датчик (28) для определения положения барабана (15) вокруг оси (A1), причем блок (13) управления выполнен с возможностью управления тросом (16) в зависимости от положения барабана (15) и геометрии барабана (15), в которой узел (10) лебедки содержит, по меньшей мере, один натяжной шкив (18), расположенный в контакте с тросом (16) и вращающийся за счет упомянутого троса (16), и второй датчик (41) для определения положения натяжного шкива (18), причем блок (13) управления выполнен с возможностью получения скорости вращения барабана (15) и скорости вращения натяжного шкива (18) и управления узлом (27) силового привода в зависимости от скорости вращения барабана, скорости вращения натяжного шкива (18), положения барабана (15) и геометрии натяжного шкива (18) и барабана (15).
2. Снегоуборочная машина по п.1, в которой узел (10) лебедки содержит устройство (17) для направления троса, перемещаемое относительно барабана (15) для размещения троса (16) в заданном положении относительно барабана (15), и силовой привод (31) для перемещения устройства (17) для направления троса относительно барабана (15), причем блок (13) управления выполнен с возможностью расчета положения упомянутого устройства (17) для направления троса в зависимости от положения барабана (15) и геометрии барабана (15) и управления силовым приводом (31) в зависимости от расчетного положения.
3. Снегоуборочная машина по п.2, в которой узел (10) лебедки содержит третий датчик (30) для определения фактического положения устройства (17) для направления троса относительно барабана (15), причем блок (13) управления выполнен с возможностью сравнения фактического положения и расчетного положения и коррекции фактического положения, когда разность между фактическим положением и расчетным положением превышает заданный приемочный диапазон.
4. Снегоуборочная машина по п.3, содержащая направляющий механизм (29) для направления устройства (17), направляющий трос, причем направляющий механизм (29) содержит направляющую (33) и каретку (34), которая установлена с возможностью скольжения на направляющей (33), закреплена на устройстве (17) для направления троса и функционально соединена с силовым приводом (31).
5. Снегоуборочная машина по п.4, в которой направляющая (33) параллельна оси (A1).
6. Снегоуборочная машина по любому из предшествующих пунктов, в которой блок (13) управления содержит запоминающее устройство (42) для хранения геометрии барабана (15) и геометрии натяжного шкива (18).
7. Способ приведения в действие узла лебедки для облегчения управления снегоуборочной машиной на крутых склонах, причем узел (10) лебедки содержит опорную конструкцию (14), барабан (15), выполненный с возможностью вращения относительно опорной конструкции (14) вокруг оси (A1), и трос (16), намотанный вокруг барабана (15), причем способ включает в себя этапы, на которых определяют положение барабана (15) вокруг оси (A1) и управления тросом (16) в зависимости от определенного положения барабана (15) и геометрии барабана (15), получают скорость вращения барабана (15) и скорость вращения натяжного шкива (18), который расположен в контакте с тросом (16) и вращается за счет троса (16), и осуществляют управление узлом (27) силового привода в зависимости от скорости вращения барабана (15), скорости вращения натяжного шкива (18), положения барабана (15), геометрии барабана (15) и геометрии натяжного шкива (18).
8. Способ по п.7, включающий в себя этапы, на которых осуществляют расчет положения устройства (17) для направления троса в зависимости от определенного положения барабана (15) и геометрии барабана (15) и регулирование положения устройства (17) для направления троса в зависимости от расчетного положения.
9. Способ по п.8, включающий в себя этапы, на которых определяют фактическое положение устройства (17) для направления троса относительно барабана (15), производят сравнение фактического положения устройства (17) для направления троса и расчетного положения и коррекцию фактического положения устройства (17) для направления троса, когда разность между фактическим положением и расчетным положением превышает заданный приемочный диапазон.
10. Способ по любому из пп.7-9, включающий в себя этап, на котором останавливают барабан (15), когда скорость вращения натяжного шкива (18) меньше контрольного параметра, который является функцией скорости вращения барабана (15), геометрии барабана (15) и геометрии натяжного шкива (18).
| Способ управления нажимными винтами прокатного стана | 1977 |
|
SU719726A1 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Снегоуборочная машина | 1988 |
|
SU1601285A1 |

