Истребование приоритета
Эта заявка заявляет приоритет по итальянской патентной заявке № 102017000064293, зарегистрированной 9 июня 2017 года, описание которой включено сюда посредством ссылки.
Область техники, к которой относится изобретение
Настоящее изобретение относится к узлу лебедки для помощи перемещению гусеничного транспортного средства, в частности, снегоукладчика, по крутым склонам и к способу управления им.
В частности, гусеничное транспортное средство содержит шасси; блок управления транспортным средством; и узел лебедки, который, в свою очередь, содержит опорную конструкцию; барабан, вращаемый относительно опорной конструкции; трос, который может наматываться и разматываться вокруг барабана; узел актуатора, соединенный с барабаном, чтобы вращать барабан вокруг оси; и устройство управления лебедкой, соединенное с узлом актуатора для управления узлом актуатора так, чтобы регулировать наматывание и разматывание троса.
Уровень техники
Как правило, гусеничное снегоукладочное транспортное средство также включает в себя культиватор для обработки снега для горнолыжных склонов и ковш для перемещения снежных масс по горнолыжным склонам.
Когда гусеничное транспортное средство используется на лыжной трассе, характеризуемой особенно крутыми склонами, свободный конец троса узла лебедки прикрепляется к расположенному выше якорю, с тем, чтобы осуществлять маневрирование гусеничного транспортного средства с помощью узла лебедки, обеспечивать большую безопасность и предотвращать скольжение гусеничного транспортного средства, если он теряет сцепление со снегом.
Документ EP 1 118 580 описывает способ для управления узлом лебедки, так что тянущее усилие троса изменяется согласно разнице в значениях давления между двумя насосами, которые питают гусеницы снегоукладочного транспортного средства, и углу стрелы лебедки относительно направления движения.
Способ управления работает хорошо в некоторых пределах, но не очень подходит, когда требуются очень короткие времена реакции и сильная устойчивость относительно внутренних и внешних проблем.
Сущность изобретения
Одной целью настоящего изобретения является предоставление узла лебедки, который преодолевает, по меньшей мере, один из недостатков предшествующего уровня техники.
Согласно настоящему изобретению, предоставляется узел лебедки, содержащий опорную конструкцию, барабан, вращаемый относительно опорной конструкции вокруг оси; трос, который может наматываться и разматываться вокруг барабана; узел актуатора, соединенный с барабаном, чтобы определять тяговое усилие троса, и сконфигурированный, чтобы принимать первый управляющий сигнал, указывающий требуемое давление насоса узла актуатора, и/или второй управляющий сигнал, указывающий требуемую производительность насоса узла актуатора; и устройство управления лебедкой, соединенное с узлом актуатора, чтобы управлять тяговым усилием троса, и сконфигурированное, чтобы предоставлять первый управляющий сигнал и/или второй управляющий сигнал; устройство управления лебедкой конфигурируется, чтобы определять первый управляющий сигнал и/или второй управляющий сигнал согласно сигналу измеренной скорости движения, указывающему измеренную скорость движения гусеничного транспортного средства, сигналу измеренного тягового усилия, указывающему тяговое усилие, измеренное на узле лебедки, и одному или более сигналам, выбранным из следующей группы сигналов: сигнал скорости троса, сигнал длины намотанного троса, сигнал требуемого тягового усилия, заданный вручную оператором, сигнал угла стрелы, указывающий угол стрелы лебедки относительно направления движения, и сигнал измеренного давления, указывающий давление, измеренное в ветви высокого давления гидравлического контура узла актуатора.
Благодаря настоящему изобретению, узел лебедки гарантирует точность в управлении тяговым усилием даже для высоких значений тягового усилия и очень коротких времен реакции для того, чтобы учитывать внезапные изменения во внешней нагрузке вследствие внезапных земных изменений или внезапных изменений в нагрузке гусеничного транспортного средства.
Согласно предпочтительному варианту осуществления, устройство управления определяет первый управляющий сигнал и/или второй управляющий сигнал согласно давлению, ассоциированному, по меньшей мере, с одним из насосов, по меньшей мере, одной из гусениц, или разнице в ассоциированных давлениях между двумя насосами двух гусениц.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой содержит первый регулируемый по частоте активный фильтр и детектор колебаний, сконфигурированный, чтобы принимать, в качестве входных данных, сигнал измеренного усилия, и предоставлять, в качестве выходных данных, одно или более значений частоты, если колебание в сигнале измеренного усилия обнаруживается; первый активный фильтр является регулируемым по частоте согласно частоте или частотам, обнаруживаемым посредством детектора колебаний, с тем, чтобы гасить или устранять колебания в тяговом усилии; устройство управления лебедкой конфигурируется, чтобы определять первый управляющий сигнал посредством первого активного фильтра; предпочтительно, детектор колебаний конфигурируется, чтобы обнаруживать колебания посредством обнаружения частот, связанных с гармониками, имеющими значения амплитуды выше заданного значения и в первом диапазоне обнаруживаемых частот.
Благодаря настоящему изобретению, узел лебедки является нечувствительным к внутренним или внешним проблемам в управлении тяговым усилием лебедки и предоставляет систему управления тяговым усилием, имеющую быстрые и устойчивые динамические характеристики. Более подробно, благодаря настоящему изобретению, управление тяговым усилием является приспособленным для реагирования быстро на команды оператора и/или изменения нагрузки вследствие внешних причин.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет первый управляющий сигнал согласно сигналу измеренного тягового усилия, указывающему тяговое усилие, измеренное на узле лебедки.
Благодаря настоящему изобретению, первый управляющий сигнал, затрагиваемый в регулировании тягового усилия узла лебедки, является управляемым по обратной связи сигналом, так что требуемое значение усилия равно значению текущего усилия лебедки.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет первый управляющий сигнал согласно сигналу измеренного угла, указывающему измеренный угол стрелы лебедки относительно направления движения.
Благодаря настоящему изобретению, тяговое усилие регулируется согласно направлению тяги и направлению движения, в частности, тяговое усилие ограничивается в некоторых обстоятельствах.
Согласно предпочтительному варианту осуществления, устройство управления стрелой определяет первый управляющий сигнал согласно сигналу скорости троса.
Согласно предпочтительному варианту осуществления, устройство управления стрелой определяет первый управляющий сигнал согласно сигналу длины намотанного троса.
Благодаря настоящему изобретению, устройство управления гарантирует более точную, быструю и более стабильную регулировку тягового усилия, в действительности, значение длины намотанного троса предоставляет возможность лучшей регулировки крутящего момента, который должен быть приложен к барабану с тем, чтобы получать заданное тяговое усилие.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет первый управляющий сигнал согласно сигналу измеренной скорости движения гусеничного транспортного средства, указывающему измеренную скорость движения гусеничного транспортного средства.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет первый управляющий сигнал согласно сигналу требуемого тягового усилия, определенному посредством внешней ручной команды, предоставленной оператором.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет первый управляющий сигнал согласно сигналу давления гусеницы, указывающему измеренное давление, по меньшей мере, одного насоса, который питает соответствующую гусеницу; предпочтительно, сигнал давления гусеницы указывает разницу в измеренных давлениях между гидравлическими контурами, питающими первую и вторую гусеницу, соответственно, гусеничного транспортного средства.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет второй управляющий сигнал согласно сигналу измеренного угла.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет второй управляющий сигнал согласно сигналу скорости троса.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет второй управляющий сигнал согласно сигналу длины намотанного троса.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет второй управляющий сигнал согласно сигналу требуемого тягового усилия.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет второй управляющий сигнал согласно сигналу измеренного тягового усилия.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет второй управляющий сигнал согласно сигналу измеренной скорости движения.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет второй управляющий сигнал согласно сигналу измеренного давления, указывающему давление, измеренное в ветви высокого давления гидравлического контура узла актуатора.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет второй управляющий сигнал согласно сигналу от оборотов двигателя гусеничного транспортного средства.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет второй сигнал управления согласно измеренному давлению, по меньшей мере, одного из насосов, по меньшей мере, одной из гусениц и/или разнице в измеренных давлениях между двумя насосами двух гусениц.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой определяет второй управляющий сигнал согласно требуемому теоретическому значению усилия.
Согласно предпочтительному варианту осуществления, устройство управления лебедкой содержит второй регулируемый по частоте активный фильтр и детектор колебаний, сконфигурированный, чтобы принимать, в качестве входных данных, сигнал измеренного усилия и предоставлять, в качестве выходных данных, одно или более значений частоты, если колебание в сигнале измеренного усилия обнаруживается; второй активный фильтр является регулируемым по частоте согласно частоте или частотам, обнаруживаемым посредством детектора колебаний, с тем, чтобы гасить или устранять колебания в тяговом усилии; устройство управления лебедкой конфигурируется, чтобы определять второй управляющий сигнал посредством второго активного фильтра; предпочтительно, детектор колебаний конфигурируется, чтобы обнаруживать колебания посредством обнаружения частот, связанных с гармониками, имеющими значения амплитуды больше заданного значения.
Согласно предпочтительному варианту осуществления узел актуатора содержит гидравлический контур и насос переменной производительности, который питает гидравлический контур и конфигурируется, чтобы изменять свою производительность согласно: давлению, измеренному в ветви высокого давления гидравлического контура, давлению, указанному посредством первого управляющего сигнала, и предпочтительно согласно второму управляющему сигналу.
Благодаря настоящему изобретению, насос переменной производительности управляется посредством первого сигнала, который является сигналом, полученным посредством сигнала обратной связи по тяговому усилию узла лебедки и обратной связи по гидравлическому давлению гидравлического контура. Другими словами, насос управляется посредством двух обратных связей: электронной обратной связи через электронные устройства по измеренному тяговому усилию и гидравлической обратной связи через гидравлические устройства по гидравлическому давлению гидравлического контура. Кроме того, в предпочтительном варианте осуществления, насос переменной производительности управляется посредством другой электронной обратной связи, т.е., посредством электронных устройств, по давлению гидравлического контура.
Согласно предпочтительному варианту осуществления, узел лебедки содержит мотор переменной производительности, соединенный с гидравлическим контуром и питаемый посредством насоса переменной производительности посредством гидравлического контура; мотор переменной производительности конфигурируется, чтобы изменять свою производительность согласно давлению, обнаруженному в гидравлическом контуре.
Другой целью настоящего изобретения является предоставление гусеничного транспортного средства, которое уменьшает недостатки предшествующего уровня техники.
Согласно настоящему изобретению, предоставляется гусеничное транспортное средство, содержащее двигатель, предпочтительно двигатель внутреннего сгорания, первую и вторую гусеницу и узел лебедки по любому из пунктов 1–11.
Согласно предпочтительному варианту осуществления, транспортное средство содержит первый насос, чтобы приводить в действие первую гусеницу, и второй насос, чтобы приводить в действие вторую гусеницу.
Согласно предпочтительному варианту осуществления, гусеничное транспортное средство содержит блок управления транспортным средством, соединенный с устройством управления лебедкой для определения командного сигнала привода.
Другой целью настоящего изобретения является предоставление способа для приведения в действие узла лебедки для гусеничного транспортного средства, который уменьшает, по меньшей мере, один из недостатков предшествующего уровня техники.
Согласно настоящему изобретению, предоставляется способ управления для узла лебедки гусеничного транспортного средства; узел лебедки содержит вращаемый барабан; трос, намотанный вокруг барабана; узел актуатора, соединенный с барабаном, чтобы наматывать или разматывать трос, содержащий насос переменной производительности и предпочтительно гидравлический мотор переменной производительности; способ содержит этап управления давлением на выходе насоса, чтобы управлять наматыванием и разматыванием троса, и/или производительностью насоса, чтобы управлять наматыванием и разматыванием троса согласно измеренной скорости движения гусеничного транспортного средства, значению измеренного тягового усилия троса и одному или более значениям, выбранным из группы значений: скорости троса, длины намотанного троса, требуемого тягового усилия, заданного вручную оператором, измеренного угла стрелы узла лебедки относительно направления движения и давления, измеренного в ветви высокого давления гидравлического контура узла актуатора.
Краткое описание чертежей
Дополнительные признаки и преимущества настоящего изобретения будут очевидны из последующего описания его неограничивающего варианта осуществления, со ссылкой на прилагаемые чертежи, на которых:
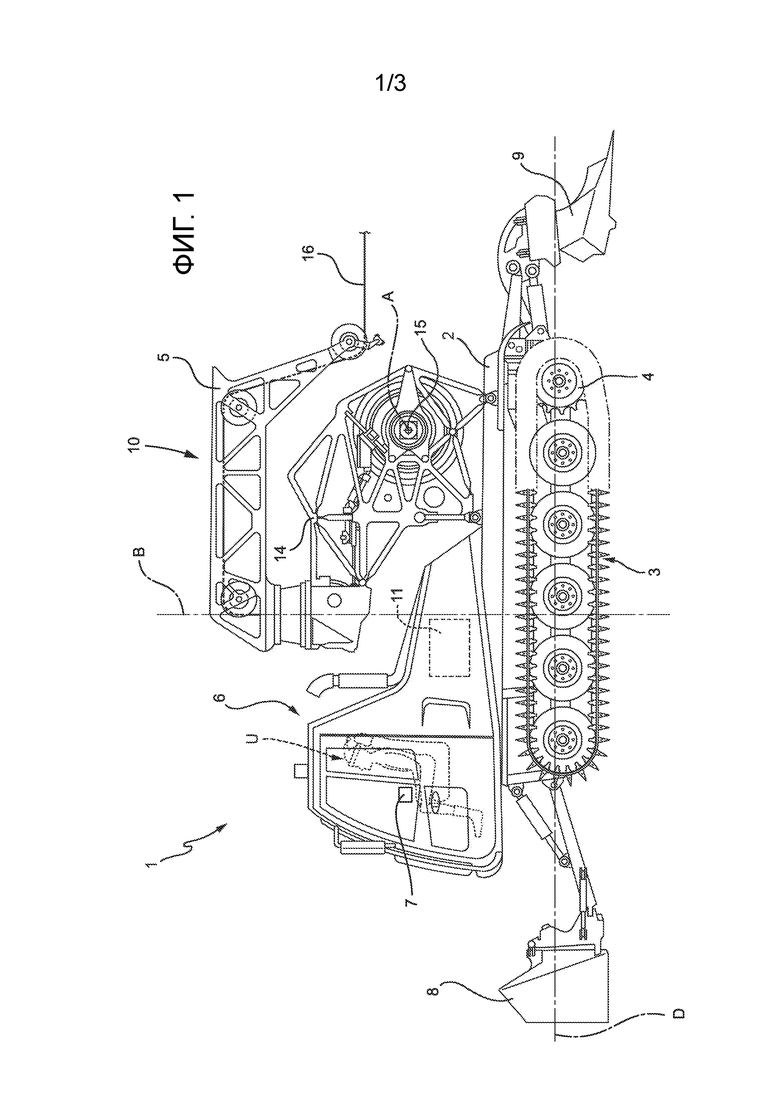
– Фиг. 1 – это вертикальный вид сбоку, с частями, удаленными для ясности, гусеничного транспортного средства, содержащего узел лебедки и сконструированного в соответствии с настоящим изобретением;
– Фиг. 2 – это схема деталей узла лебедки на фиг. 1 и
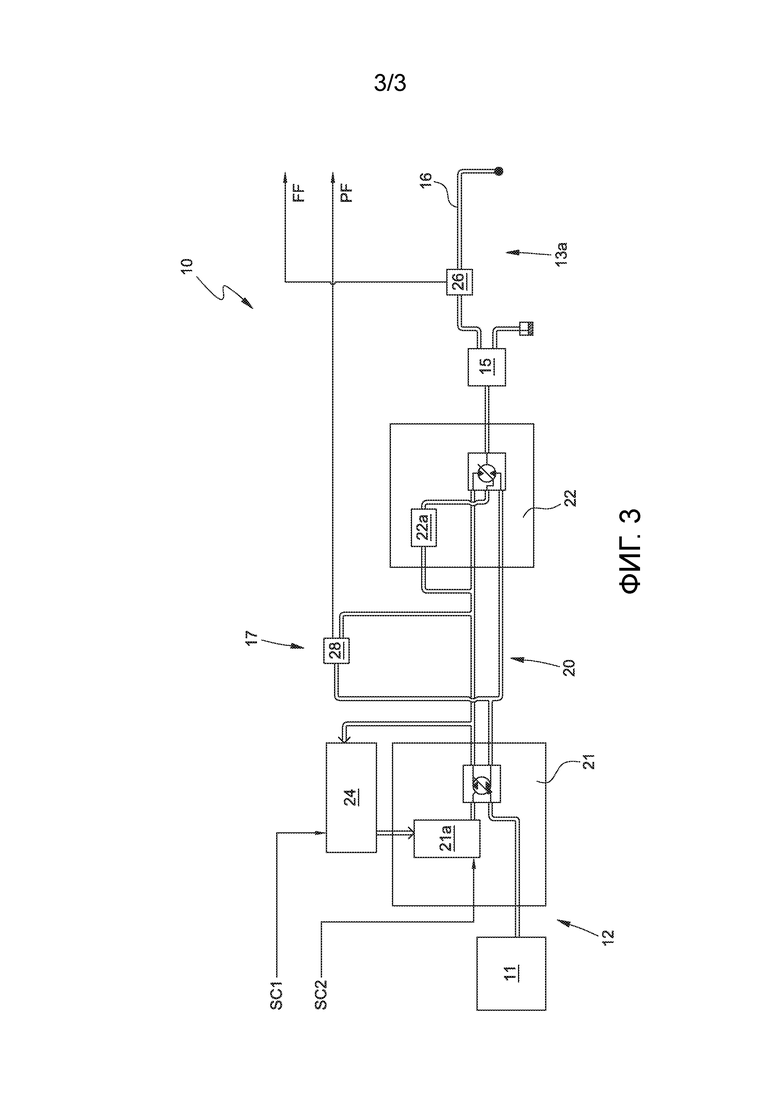
– Фиг. 3 – это схема деталей узла лебедки на фиг. 1.
Оптимальный режим осуществления изобретения
Со ссылкой на фиг. 1, ссылочный номер 1 определяет, в целом, гусеничное транспортное средство. В предпочтительном варианте осуществления гусеничное транспортное средство является снегоукладчиком для подготовки горнолыжных склонов.
Гусеничное транспортное средство 1 содержит шасси 2; две гусеницы 3 (только одна показана на фиг. 1); два ведущих колеса 4 (только одно показано на фиг. 1), функционально соединенных с соответствующими гусеницами 3; кабину 6; пользовательский интерфейс 7, расположенный в кабине 6; ковш 8, поддерживаемый спереди посредством шасси 2; культиватор 9, поддерживаемый сзади посредством шасси 2; узел 10 лебедки, прикрепленный к шасси 2; двигатель 11, предпочтительно двигатель внутреннего сгорания; и силовую передачу 12 (частично видимую на фиг. 3), функционально соединенную с двигателем 11 внутреннего сгорания, ведущими колесами 4, ковшом 8 и культиватором 9. Кроме того, силовая передача 12 соединяет двигатель 11 с узлом 10 лебедки.
Силовая передача 12 может быть гидравлической или электрической или сочетанием гидравлической и электрической.
Гусеничное транспортное средство 1 содержит блок 13 управления транспортным средством, соединенный с пользовательским интерфейсом 7 и подходящий для управления гусеничным транспортным средством 1.
Узел 10 лебедки содержит устройство 13a управления лебедкой, сконфигурированное, чтобы управлять узлом 10 лебедки. Устройство 13a управления лебедкой также соединяется с пользовательским интерфейсом 7.
В предпочтительном варианте осуществления гусеничное транспортное средство 1 содержит первый насос (не показан на прилагаемых чертежах) для приведения в действие одной из гусениц 3 и второй насос (не показан на прилагаемых чертежах) для приведения в действие другой гусеницы 3.
Со ссылкой на фиг. 1 и 2, узел 10 лебедки содержит опорную конструкцию 14, прикрепленную к шасси 2, барабан 15, вращаемый относительно опорной конструкции 14 вокруг оси A; трос 16, имеющий один конец, прикрепленный к барабану 15, и намотанный вокруг барабана 15; узел 17 актуатора (фиг. 3), соединенный с барабаном 15, чтобы наматывать или разматывать трос 16 посредством тягового усилия; и устройство 13a управления лебедкой, соединенное с узлом 17 актуатора для управления тяговым усилием троса 16.
Устройство 13a управления лебедкой конфигурируется, чтобы определять и выдавать первый управляющий сигнал SC1 и второй управляющий сигнал SC2 для управления узлом 17 актуатора.
Узел 17 актуатора конфигурируется, чтобы принимать первый управляющий сигнал SC1 и второй управляющий сигнал SC2 от устройства 13a управления лебедкой и управляться посредством устройства 13a управления лебедкой посредством первого управляющего сигнала SC1 и второго управляющего сигнала SC2.
Узел 17 актуатора содержит гидравлический контур 20, насос 21 переменной производительности, который питает гидравлический контур, и мотор 22 переменной производительности, который питается посредством насоса 21 переменной производительности через гидравлический контур 20.
Узел 17 актуатора содержит гидравлически управляемую дроссельную заслонку 24, вход которой соединяется с ветвью высокого давления гидравлического контура. Кроме того, дроссельная заслонка 24 соединяется с устройством 13a управления лебедкой для приема и управления посредством первого управляющего сигнала SC1. Дроссельная заслонка регулирует свой собственный выход согласно первому управляющему сигналу SC1.
Насос 21 переменной производительности содержит блок 21a управления насосом для того, чтобы изменять свою собственную производительность. Блок 21a управления насосом содержит гидравлический вход, соединенный с выходом дроссельной заслонки 24, и электрический вход, сконфигурированный, чтобы принимать электрический сигнал, соединенный с устройством 13a управления лебедкой для приема второго управляющего сигнала SC2. Более подробно, блок 21a управления насосом конфигурируется, чтобы изменять производительность насоса 21 переменной производительности согласно значению давления, принятому через гидравлический вход, и значению электрического сигнала, принятого посредством электрического входа, более подробно, блок 21a управления насосом регулирует производительность насоса 21 переменной производительности согласно меньшему из значения давления и значения электрического сигнала.
В альтернативном варианте осуществления второй управляющий сигнал SC2 пропускается или имеет фиксированное значение, всегда равное максимальному возможному значению, в этом случае блок 21a управления насосом регулирует производительность насоса 21 переменой производительности согласно значению давления, принятому из гидравлического входа.
В другом альтернативном варианте осуществления, первый управляющий сигнал SC1 пропускается или имеет фиксированное значение, всегда равное максимальному возможному значению, в этом случае блок 21a управления насосом регулирует производительность насоса 21 переменной производительности согласно значению производительности, указанному посредством второго управляющего сигнала SC2.
Мотор 22 переменной производительности содержит блок 22a управления мотором, который конфигурируется, чтобы регулировать производительность мотора 22 переменной производительности. Блок 22a управления мотором соединяется с ветвью высокого давления гидравлического контура 20, чтобы принимать, в качестве входных данных, находящуюся под давлением жидкость и регулировать производительность мотора 22 переменной производительности согласно давлению в ветви высокого давления гидравлического контура 20. Другими словами, мотор 22 переменной производительности конфигурируется, чтобы изменять свою собственную производительность согласно давлению в ветви высокого давления гидравлического контура 20. Давление гидравлического контура, как показано ранее, регулируется согласно первому управляющему сигналу SC1. Соответственно, мотор 22 переменной производительности конфигурируется, чтобы изменять свою производительность согласно первому управляющему сигналу SC1.
Мотор 22 переменной производительности соединяется с барабаном 15 и действует на барабан 15 для регулировки тягового усилия троса 16.
Устройство 13a управления лебедкой содержит датчик 26 усилия, в частности, датчик механической нагрузки, соединенный с тросом 16 для обнаружения тягового усилия, испытываемого тросом 16. Датчик 26 усилия определяет и выдает сигнал FF измеренного тягового усилия, указывающий тяговое усилие, измеренное на тросе 16.
Пользовательский интерфейс 7 соединяется с устройством 13a управления лебедкой и предоставляет возможность отправки команды требуемого усилия, принятой от оператора U. Более подробно, пользовательский интерфейс 7 выдает сигнал S4 требуемого усилия согласно команде требуемого усилия, принятой от оператора U.
Устройство 13a управления лебедкой содержит датчик 28 давления, который соединяется с ветвью высокого давления гидравлического контура 20 для обнаружения давления гидравлического контура 20 и выдачи сигнала PF измеренного давления, который является электрическим сигналом, указывающим давление в ветви высокого давления гидравлического контура 20.
Гусеничное транспортное средство 1 содержит датчик скорости (не показан на прилагаемых чертежах), чтобы измерять скорость движения гусеничного транспортного средства 1. Датчик скорости соединяется с устройством 13a управления лебедкой, чтобы определять и отправлять устройству 13a управления лебедкой сигнал S2 измеренной скорости движения, указывающий измеренную скорость движения.
Узел 10 лебедки содержит датчик скорости троса (не показан на прилагаемых чертежах), соединенный с тросом 16, чтобы измерять скорость перемещения троса 16 и определять сигнал S3 измеренной скорости троса, указывающий измеренную скорость S3 троса, которая должна быть отправлена устройству 13a управления лебедкой. В одном варианте осуществления настоящего изобретения датчик скорости троса является присоединенным к барабану и измеряет обороты барабана и отправляет число оборотов барабана устройству управления лебедкой.
Устройство 10 лебедки содержит датчик намотанного троса, соединенный с тросом, чтобы измерять количество троса, намотанного вокруг барабана. Датчик намотанного троса определяет и отправляет сигнал S7 измеренной длины намотанного троса устройству управления лебедкой. В одном варианте осуществления датчик намотанного троса содержит вычислительный блок, который вычисляет величину намотанного троса согласно числу положительных или отрицательных оборотов барабана. Датчик, который обнаруживает число оборотов барабана, может быть частью датчика намотанного троса или быть отдельным датчиком.
Узел 10 датчика содержит датчик угла, соединенный со стрелой 5 узла 10 лебедки, чтобы измерять угол, который стрела 5 узла 10 лебедки формирует с направлением D движения гусеничного транспортного средства. Датчик угла определяет и отправляет сигнал S5 измеренного угла устройству 13a управления лебедкой. В частности, стрела 5 прикрепляется к опорной конструкции 14 и является поворачиваемой вокруг вертикальной оси B. Стрела 5 соединяется с барабаном 15 и направляет трос 16.
Гусеничное транспортное средство 1 содержит датчик давления (не показан на прилагаемых чертежах), соединенный с первым и вторым насосом (не показан), соответственно, первой из гусениц 3 и другой гусеницы 3, в частности, соединенный с гидравлическим контуром первого насоса и гидравлическим контуром второго насоса. Датчик давления конфигурируется, чтобы определять сигнал S1 измеренного давления гусеницы, указывающий разницу в давлении между двумя гидравлическими контурами двух гусениц 3.
Сигнал S1 давления гусеницы, сигнал S2 измеренной скорости движения, сигнал S3 скорости троса, сигнал S4 требуемого усилия, сигнал S5 требуемого угла, сигнал S7 длины намотанного троса, сигнал FF измеренного тягового усилия, сигнал PF измеренного давления являются электрическими сигналами.
Устройство 13a управления лебедкой конфигурируется, чтобы определять первый и второй управляющие сигналы SC1 и SC2 согласно сигналу S2 из измеренной скорости движения гусеничного транспортного средства 1; сигналу FF измеренного тягового усилия; сигналу S3 скорости троса; сигналу S7 длины намотанного троса; сигналу S5 измеренного угла и сигналу S4 требуемого усилия.
Более подробно, устройство 13a управления лебедкой определяет первый управляющий сигнал SC1 согласно сигналу S5 измеренного угла, сигналу S3 скорости троса, сигналу S7 длины намотанного троса, сигналу S2 измеренной скорости движения, сигналу FF измеренного тягового усилия, и сигналу S4 требуемого тягового усилия.
Устройство 13a управления лебедкой также определяет первый управляющий сигнал SC1 согласно сигналу S1 давления гусеницы.
Со ссылкой на фиг. 2, устройство 13a управления лебедкой определяет второй управляющий сигнал SC2 согласно сигналу S5 измеренного угла, сигналу S7 длины намотанного троса, сигналу FF измеренного тягового усилия, сигналу S2 измеренной скорости движения, сигналу PF измеренного давления, сигналу S3 скорости троса и предпочтительно сигналу S4 требуемого тягового усилия и/или сигналу S1 давления гусеницы.
Кроме того, гусеничное транспортное средство 1 содержит датчик оборотов двигателя, соединенный с двигателем 11 и определяющий сигнал S6 из измеренных оборотов двигателя, указывающий измеренное число оборотов двигателя 11 гусеничного транспортного средства 1. Сигнал S6 оборотов двигателя является электрическим сигналом.
В предпочтительном, но неограничивающем варианте осуществления настоящего изобретения, устройство 13a управления лебедкой определяет второй управляющий сигнал SC2 согласно сигналу S6 оборотов двигателя в дополнение к сигналам, указанным выше.
В альтернативном варианте осуществления один или более сигналов, перечисленных выше, пропускаются в определении первого управляющего сигнала SC1 и второго управляющего сигнала SC2 посредством устройства 13a управления лебедки.
В альтернативном варианте осуществления устройство 13a управления лебедкой не определяет второй управляющий сигнал SC2 или определяет его с фиксированным, непеременным значением согласно сигналам, перечисленным выше. В этом случае, устройство 13a управления лебедкой определяет второй управляющий сигнал SC2 как равный максимальному возможному значению SC2 управляющего сигнала.
Два альтернативных варианта осуществления, описанных только что, могут быть объединены друг с другом, другими словами, один вариант осуществления изобретения содержит устройство 13a управления лебедкой, которое определяет только первый управляющий сигнал SC1 согласно методам, перечисленным выше.
В альтернативном варианте осуществления устройство 13a управления лебедкой не определяет первый управляющий сигнал SC1 или определяет его с фиксированным, непеременным значением согласно сигналам, перечисленным выше. В этом случае, устройство 13a управления лебедкой определяет первый управляющий сигнал SC1 как равный максимальному возможному значению SC1 управляющего сигнала.
Альтернативные варианты осуществления, описанные только что, могут быть объединены друг с другом, другими словами, один вариант осуществления изобретения содержит устройство 13a управления лебедкой, которое определяет только второй управляющий сигнал SC2 согласно методам, перечисленным выше.
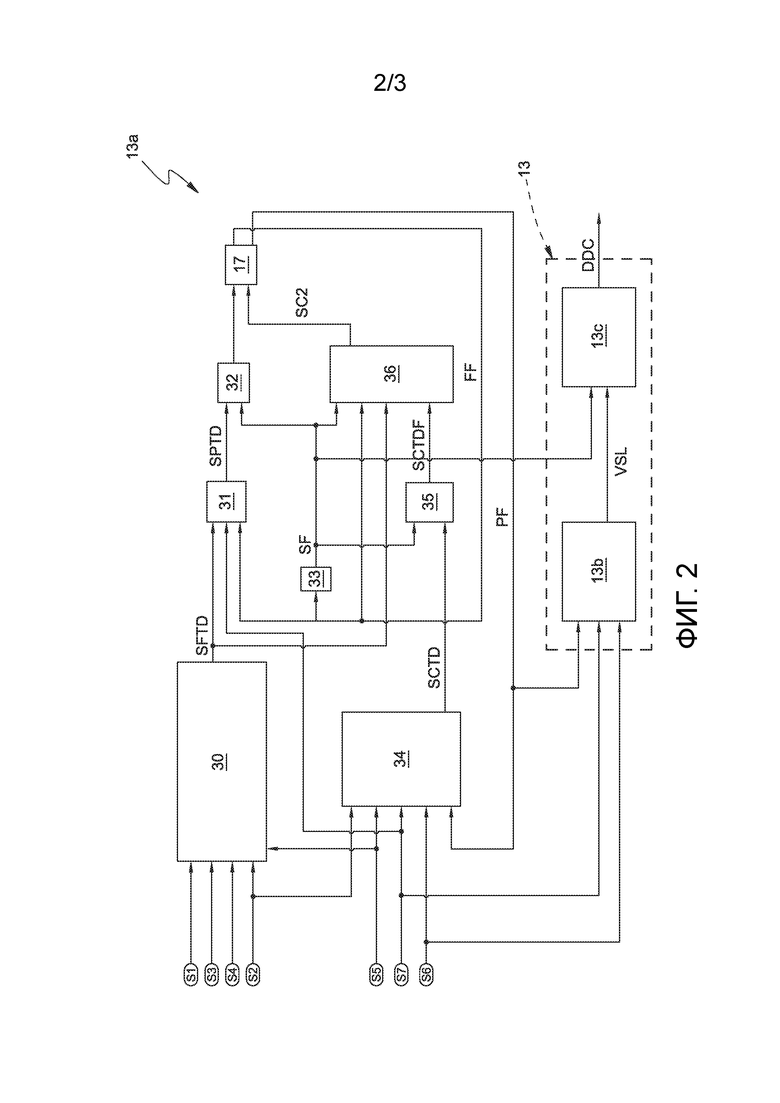
В предпочтительном, но не ограничивающем варианте осуществления настоящего изобретения, устройство 13a управления лебедкой определяет первый и второй управляющие сигналы SC1 и SC2 согласно нижеследующему описанию.
Устройство 13a управления лебедкой содержит вычислительный блок 30, сконфигурированный, чтобы вычислять сигнал SFTD требуемого теоретического усилия, указывающий требуемое теоретическое значение тягового усилия. Блок 30 управления принимает сигнал S5 измеренного угла, сигнал S3 скорости троса, сигнал S4 измеренного тягового усилия, сигнал S2 измеренной скорости движения, в качестве входных данных, и определяет сигнал SFTD требуемого теоретического усилия согласно входным сигналам.
В одном варианте осуществления вычислительный блок 30 принимает сигнал S1 датчика гусеницы, в качестве входных данных, и определяет сигнал SFTD требуемого теоретического усилия, также согласно упомянутому сигналу вместе с сигналами, перечисленными выше.
Устройство 13a управления лебедкой содержит вычислительный блок 31, соединенный с вычислительным блоком 30. Вычислительный блок 31 принимает сигнал SFTD требуемого теоретического усилия, сигнал S7 длины намотанного троса и сигнал FF измеренного усилия, в качестве входных данных, и определяет сигнал SPTD требуемого теоретического давления.
Устройство 13a управления лебедкой содержит регулируемый по частоте активный фильтр 32 и детектор 33 колебаний, сконфигурированный, чтобы принимать, в качестве входных данных, сигнал FF измеренного тягового усилия и предоставлять, в качестве выходных данных, сигнал SF фильтрации, указывающий одно или более значений частоты, если обнаруживается колебание в сигнале FF измеренного усилия. Детектор 33 колебаний конфигурируется, чтобы обнаруживать колебания посредством обнаружения частот, связанных с гармониками, имеющими значения амплитуды больше заданного значения и в первом диапазоне обнаруживаемых частот. С этой целью, детектор 33 колебаний может выполнять FFT или DFT или иметь другое электронное средство для обнаружения гармоник больше заданной амплитуды и в первом диапазоне обнаруживаемых частот.
Активный фильтр 32 регулируется по частоте согласно частоте или частотам, обнаруженным посредством детектора 33 колебаний, с тем, чтобы гасить или устранять колебания в тяговом усилии. С этой целью, активный фильтр 32 принимает сигнал SF фильтрации и сигнал SPTD требуемого теоретического давления, в качестве входных данных, и определяет выходной управляющий сигнал SC1. Управляющий сигнал SC1 определяется согласно сигналу SPTD требуемого теоретического давления и фильтруется от каких–либо колебаний, указанных посредством сигнала SF фильтрации.
Устройство 13a управления лебедкой также содержит вычислительный блок 34, который принимает сигнал S2 измеренной скорости движения, сигнал S7 длины намотанного троса, сигнал S5 измеренного угла и сигнал PF измеренного давления, в качестве входных данных, и предоставляет выходной сигнал SCTD требуемой теоретической производительности, вычисленный согласно входным сигналам.
В предпочтительном варианте осуществления вычислительный блок 34 принимает сигнал S6 оборотов двигателя, в качестве входных данных, и определяет сигнал SCTD требуемой теоретической производительности, также как сигналы, перечисленные только что выше.
Устройство 13a управления лебедкой содержит регулируемый по частоте активный фильтр 35, соединенный с детектором 33 колебаний. Активный фильтр 35 является регулируемым по частоте согласно частоте или частотам, обнаруженным посредством детектора 33 колебаний, с тем, чтобы гасить или устранять колебания в тяговом усилии.
Активный фильтр 35 принимает сигнал SCTD требуемой теоретической производительности и сигнал SF фильтрации, в качестве входных данных, и определяет отфильтрованный сигнал SCTDF требуемой теоретической производительности. Отфильтрованный сигнал SCTDF требуемой теоретической производительности определяется согласно сигналу SCTD требуемой теоретической производительности и фильтруется от частот, указанных в сигнале SF фильтрации.
Устройство 13a управления лебедкой содержит вычислительный блок 36, который принимает, в качестве входных данных, фильтрованный сигнал SCTDF требуемой теоретической производительности, сигнал SF фильтрации, сигнал FF измеренного тягового усилия и сигнал SFTD требуемого теоретического усилия, и определяет, в качестве выходных данных, второй управляющий сигнал SC2 согласно входным сигналам.
Кроме того, блок 13 управления транспортным средством конфигурируется, чтобы определять командный сигнал DDC привода согласно сигналу S6 оборотов двигателя, сигналу S7 длины намотанного троса, сигналу PF измеренного давления и сигналу SF фильтрации.
Более подробно, блок 13 управления транспортным средством соединяется с устройством 13a управления лебедкой, чтобы определять командный сигнал DDC привода.
Более подробно, блок 13 управления транспортным средством содержит блок 13b обработки и блок 13c обработки. Блок 13b обработки принимает, в качестве входных данных, сигнал S6 оборотов двигателя, сигнал S7 длины намотанного троса, сигнал PF измеренного давления и определяет сигнал VSL предела скорости, указывающий максимальную скорость, которой гусеничному транспортному средству 1 разрешается достигать. Блок 13c обработки соединяется с блоком 13b обработки и принимает сигнал VSL предела скорости и сигнал SF фильтрации, в качестве входных данных, и определяет командный сигнал DDC привода, который определяет движение снегоукладочного транспортного средства 1. В частности, командный сигнал DDC привода может управлять гусеницами снегоукладочного транспортного средства, чтобы определять движение снегоукладочного транспортного средства 1.
Благодаря настоящему изобретению, управляющий сигнал SC1 регулирует тяговое усилие узла 10 лебедки посредством системы управления с обратной связью, которая формируется посредством электронного управления с обратной связью по измеренному тяговому усилию последовательно с гидравлическим управлением с обратной связью по давлению гидравлического контура 20. Электронное управление с обратной связью является устойчивым и нечувствительным к внутренним и внешним проблемам и/или изменениям в командах и/или изменениям в нагрузках благодаря регулируемой активной фильтрации и детектору колебаний.
Кроме того, в варианте осуществления, в котором управляющий сигнал SC2 регулируется согласно входным данным, тяговое усилие и тяговая скорость регулируются независимо и посредством двух электронных управлений с обратной связью, которые существуют последовательно с гидравлическим управлением с обратной связью. Этот тип управления предоставляет преимущества, намеченные в общих чертах выше, объединенные с преимуществом наличия очень точного и устойчивого управления по тяговому усилию и тяговой скорости даже для высоких значений и для быстрых динамических характеристик вследствие внезапных изменений в нагрузке. Кроме того, этот тип управления уменьшает расход.
Также является очевидным, что настоящее изобретение также охватывает варианты осуществления, неописанные в подробном описании, и эквивалентные варианты осуществления, которые попадают в рамки защиты прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЛЫЖНЫХ ТРАСС И СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ ДЛЯ ТАКОГО СНЕГОХОДНОГО ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2799094C2 |
| ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И ПАРК ГУСЕНИЧНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2018 |
|
RU2754877C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВЕДЕНИЕМ В ДВИЖЕНИЕ ГУСЕНИЧНОГО КАНАВОКОПАТЕЛЯ | 2008 |
|
RU2572850C2 |
| ДВУХГУСЕНИЧНЫЙ ТРАКТОР | 2013 |
|
RU2607932C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2224678C1 |
| МАЛОГАБАРИТНЫЙ ГУСЕНИЧНЫЙ КАТЕР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2023 |
|
RU2836745C1 |
| УПРАВЛЯЕМЫЙ ГУСЕНИЧНЫЙ ХОДОВОЙ МЕХАНИЗМ | 2015 |
|
RU2679792C2 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| ГУСЕНИЧНЫЙ БУЛЬДОЗЕР С ЭЛЕКТРИЧЕСКОЙ ТРАНСМИССИЕЙ И ХОДОВОЙ ЧАСТЬЮ С ИЗМЕНЯЕМЫМ ПОЛОЖЕНИЕМ ВЕДУЩИХ КОЛЕС | 2018 |
|
RU2696634C1 |
| УСТРОЙСТВО ДЛЯ ПРОИЗВОДСТВА ПОДВОДНЫХ РАБОТ | 2016 |
|
RU2612421C1 |
Первое изобретение касается узла лебедки гусеничного транспортного средства, который содержит опорную конструкцию, барабан, вращающийся вокруг оси; трос (16), намотанный вокруг барабана; узел (10) актуатора, соединенный с барабаном, чтобы наматывать или разматывать трос (16). Узел (10) актуатора сконфигурирован с возможностью принимать первый управляющий сигнал (SC1), указывающий требуемое давление насоса узла (10) актуатора, и/или второй управляющий сигнал (SC2), указывающий требуемую производительность насоса; и устройство управления лебедкой, соединенное с узлом (10) актуатора, чтобы управлять наматыванием и разматыванием троса (16), и сконфигурированное, чтобы определять первый управляющий сигнал (SC1) и/или второй управляющий сигнал (SC2) согласно сигналу (S2) измеренной скорости движения, указывающему измеренную скорость движения гусеничного транспортного средства (1), сигналу (FF) измеренного тягового усилия, указывающему тяговое усилие, измеренное на узле (10) лебедки, и одному или более сигналам, выбранным из следующей группы сигналов: сигнал (S3) скорости троса, сигнал (S7) длины намотанного троса, сигнал (S4) требуемого тягового усилия, заданный вручную оператором, сигнал (S5) от измеренного угла стрелы (5) узла (10) лебедки относительно направления движения (D) и сигнал (PF) измеренного давления, указывающий давление, измеренное в ветви высокого давления гидравлического контура узла актуатора. Второе изобретение касается конструкции гусеничного транспортного средства с указанным узлом. Третье изобретение касается способа управления для узла лебедки гусеничного транспортного средства. Изобретения обеспечивают быстродействие узла лебедки. 3 н. и 12 з.п. ф-лы, 3 ил. 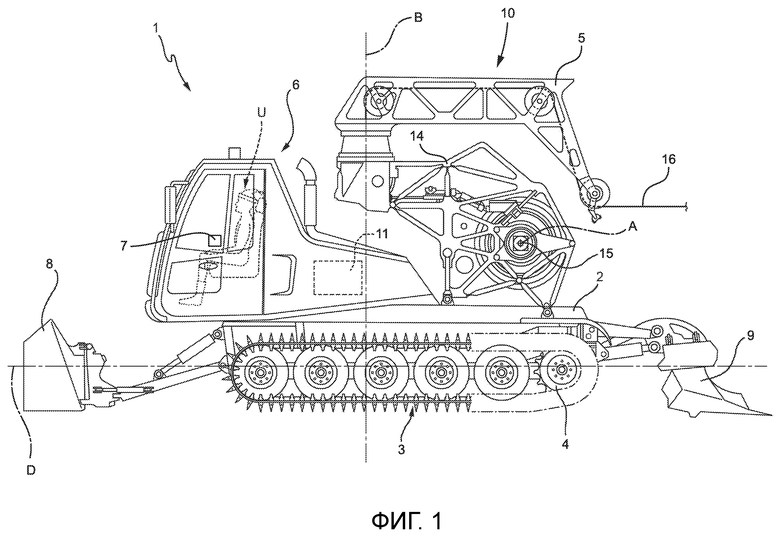
1. Узел лебедки для гусеничного транспортного средства, содержащий опорную конструкцию (14), барабан (15), вращающийся относительно опорной конструкции (14) вокруг оси (A); трос (16), намотанный вокруг барабана (15); стрелу (5), соединенную с барабаном (15) и направляющую трос (16); узел (10) актуатора, соединенный с барабаном (15), чтобы наматывать или разматывать трос (16), и выполненный с возможностью приема первого управляющего сигнала (SC1), указывающего требуемое давление насоса (21) узла (10) актуатора, и/или второго управляющего сигнала (SC2), указывающего требуемую производительность насоса (21) узла (10) актуатора; и устройство (13a) управления лебедкой, соединенное с узлом (10) актуатора, чтобы управлять наматыванием и разматыванием троса (16), и выполненное с возможностью предоставления первого управляющего сигнала (SC1) и/или второго управляющего сигнала (SC2); при этом устройство (13a) управления лебедкой выполнено с возможностью определения первого управляющего сигнала (SC1) и/или второго управляющего сигнала (SC2) согласно сигналу (S2) измеренной скорости движения, указывающему измеренную скорость движения гусеничного транспортного средства (1), сигналу (FF) измеренного тягового усилия, указывающему тяговое усилие, измеренное на узле (10) лебедки, и одному или более сигналам, выбранным из следующей группы сигналов: сигнал (S3) скорости троса, сигнал (S7) длины намотанного троса, сигнал (S4) требуемого тягового усилия, заданный вручную оператором, сигнал (S5) от измеренного угла стрелы (5) узла (10) лебедки относительно направления движения (D) и сигнал (PF) измеренного давления, указывающий давление, измеренное в ветви высокого давления гидравлического контура (20) узла (17) актуатора.
2. Узел лебедки по п.1, при этом устройство (13a) управления лебедкой выполнено с возможностью определения первого управляющего сигнала (SC1) и/или второго управляющего сигнала (SC2) согласно давлению по меньшей мере одного из насосов по меньшей мере, одной из гусениц или разнице давления между двумя насосами двух гусениц.
3. Узел лебедки по п.1 или 2, в котором устройство (13a) управления лебедкой содержит первый регулируемый по частоте активный фильтр (31) и детектор (33) колебаний, выполненный с возможностью приема, в качестве входных данных, сигнала (FF) измеренного тягового усилия и предоставления, в качестве выходных данных, одного или более значений частоты, если обнаруживается колебание в сигнале (FF) измеренного тягового усилия; первый активный фильтр (31) является регулируемым по частоте согласно частоте или частотам, обнаруживаемым посредством детектора (33) колебаний, с тем, чтобы гасить или устранять колебания в тяговом усилии; устройство (13a) управления лебедкой выполнено с возможностью определения первого управляющего сигнала (SC1) посредством первого активного фильтра (31); предпочтительно детектор (33) колебаний выполнен с возможностью обнаружения колебаний посредством обнаружения частот, связанных с гармониками, имеющими значения амплитуды больше заданного значения.
4. Узел лебедки по любому пункту из предшествующих пунктов, в котором устройство (13a) управления лебедкой выполнено с возможностью определения первого управляющего сигнала (SC1) согласно сигналу (S5) измеренного угла, указывающему измерение угла стрелы узла (10) лебедки относительно направления движения (D), и/или согласно сигналу (S3) скорости троса, и/или согласно сигналу (S7) длины намотанного троса, и/или согласно сигналу (S2) измеренной скорости движения, и/или согласно сигналу (FF) измеренного тягового усилия, и/или согласно сигналу (S4) требуемого тягового усилия, заданному вручную оператором (U).
5. Узел лебедки по любому пункту из предшествующих пунктов, в котором устройство (13a) управления лебедкой выполнено с возможностью определения первого управляющего сигнала (SC1) согласно значению по меньшей мере одного давления по меньшей мере одного насоса, который питает соответствующую гусеницу (3); предпочтительно согласно сигналу (S1) давления гусеницы, указывающему разницу давления между гидравлическими контурами, питающими первую и вторую гусеницу (3), соответственно, гусеничного транспортного средства (1).
6. Узел лебедки по любому пункту из предшествующих пунктов, в котором устройство (13a) управления лебедкой выполнено с возможностью определения второго управляющего сигнала (SC2) согласно сигналу (S5) измеренного угла, и/или сигналу (S3) скорости троса, и/или сигналу (S7) длины намотанного троса, и/или сигналу (S4) требуемого усилия, заданному оператором, и/или сигналу (FF) измеренного тягового усилия, и/или согласно сигналу (S2) измеренной скорости движения, и/или сигналу (PF) измеренного давления.
7. Узел лебедки по любому пункту из предшествующих пунктов, в котором устройство (13a) управления лебедкой выполнено с возможностью определения второго управляющего сигнала (SC2) согласно сигналу (S6) оборотов двигателя и/или сигналу (S1) давления гусеницы.
8. Узел лебедки по любому пункту из предшествующих пунктов, в котором устройство (13a) управления лебедкой выполнено с возможностью определения второго управляющего сигнала (SC2) согласно сигналу (SFTD) требуемого теоретического усилия; устройство (13a) управления лебедкой выполнено с возможностью вычисления сигнала (SFTD) требуемого теоретического усилия согласно сигналу (S5) измеренного угла, и/или согласно сигналу (S3) скорости троса, и/или согласно сигналу (S4) требуемого тягового усилия, и/или согласно сигналу (S1) давления гусеницы, и/или согласно сигналу (S2) измеренной скорости движения.
9. Узел лебедки по любому пункту из предшествующих пунктов, содержащий второй регулируемый по частоте активный фильтр (35) и детектор (33) колебаний, выполненный с возможностью приема, в качестве входных данных, сигнала (FF) измеренного тягового усилия и предоставления, в качестве выходных данных, одного или более значений частоты, если обнаруживается колебание в сигнале (FF) измеренного тягового усилия; второй активный фильтр (35) является регулируемым по частоте согласно частоте или частотам, обнаруживаемым посредством детектора (33) колебаний, с тем, чтобы гасить или устранять колебания в тяговом усилии; устройство (13a) управления лебедкой конфигурируется, чтобы определять второй управляющий сигнал (SC2) посредством второго активного фильтра (35); предпочтительно детектор (33) колебаний выполнен с возможностью обнаружения колебания посредством обнаружения частот, связанных с гармониками, имеющими значения амплитуды больше заданного значения.
10. Узел лебедки по любому пункту из предшествующих пунктов, в котором узел (17) актуатора содержит гидравлический контур (20) и насос (21) переменной производительности для питания гидравлического контура (20) и выполнен с возможностью изменения своей производительности согласно давлению, определенному согласно: давлению в ветви высокого давления гидравлического контура (20), давлению, указанному посредством первого управляющего сигнала (SC1) и предпочтительно согласно второму управляющему сигналу (SC2).
11. Узел лебедки по п.10, содержащий мотор (22) переменной производительности, соединенный с гидравлическим контуром (20) и питаемый посредством насоса (21) переменной производительности посредством гидравлического контура (20); мотор (22) переменной производительности, выполненный с возможностью изменения своей производительности согласно давлению, обнаруженному в ветви высокого давления гидравлического контура (20).
12. Гусеничное транспортное средство, содержащее двигатель (11), предпочтительно двигатель внутреннего сгорания, первую и вторую гусеницу (3) и узел (10) лебедки согласно любому пункту из предшествующих пунктов.
13. Гусеничное транспортное средство по п.12, содержащее первый насос для приведения в действие первой гусеницы (3) и второй насос для приведения в действие второй гусеницы (3).
14. Гусеничное транспортное средство по п.12 или 13, содержащее блок (13) управления транспортным средством, соединенный с устройством (13a) управления лебедкой для определения командного сигнала (DDC) привода.
15. Способ управления для узла лебедки гусеничного транспортного средства, содержащего вращаемый барабан (15); трос (16), намотанный вокруг барабана (15); стрелу (5), соединенную с барабаном (15) и направляющую трос (16); узел (10) актуатора, соединенный с барабаном (15), чтобы наматывать или разматывать трос (16), и содержащий насос (21) переменной производительности и предпочтительно гидравлический мотор (22) переменной производительности; при этом способ содержит этап, на котором управляют давлением на выходе насоса, чтобы управлять наматыванием и разматыванием троса (16), и/или производительностью насоса, чтобы управлять наматыванием и разматыванием троса (16), согласно измеренной скорости движения гусеничного транспортного средства (10), значению измеренного тягового усилия троса (16) и одному или более значениям, выбранным из группы значений: скорости (S3) троса, длины (S7) намотанного троса, требуемого тягового усилия (S4), заданного вручную оператором, измеренного угла (S5) стрелы (5) узла (10) лебедки относительно направления движения (D) и давления, измеренного в ветви высокого давления гидравлического контура (20) узла (17) актуатора.
| US 5984277 A1, 16.11.1999 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Устройство для очистки поверхностей | 1983 |
|
SU1118580A1 |
| СНЕГОУБОРОЧНАЯ МАШИНА, СОДЕРЖАЩАЯ УЗЕЛ ЛЕБЕДКИ ДЛЯ ОБЛЕГЧЕНИЯ УПРАВЛЕНИЯ СНЕГОУБОРОЧНОЙ МАШИНОЙ НА КРУТЫХ СКЛОНАХ, И СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ УЗЛА ЛЕБЕДКИ | 2010 |
|
RU2525259C2 |
| Устройство для дистанционного управления лебедкой грузоподъемного механизма | 1974 |
|
SU519388A1 |
| Устройство для управления лебедками стрелового крана | 1984 |
|
SU1293098A1 |

