Область техники
Настоящее изобретение относится к гусеничному транспортному средству для лыжных трасс.
В частности, настоящее изобретение относится к гусеничному транспортному средству для транспортировки людей по лыжным трассам и/или подготовки лыжных трасс.
Уровень техники
Текущие гусеничные транспортные средства для лыжных трасс характеризуются тем, что они получают множество сигналов, взаимосвязанных с данными о работе гусеничного транспортного средства, и возможно, если присутствует, оборудования гусеничного транспортного средства для подготовки лыжных трасс, такого как, например, фреза, ковш и лебедка.
Текущие гусеничные транспортные средства для лыжных трасс часто конфигурируются, чтобы получать сигналы, взаимосвязанные с: погодными условиями, такими как температура и влажность; снежными условиями, такими как температура и толщина снежного покрова; препятствиями на трассе; и ориентирными точками. Полученные сигналы обрабатываются, чтобы предоставлять дополнительные сигналы для того, чтобы передавать столько информации, сколько возможно, чтобы обеспечивать безопасность, и, когда применимо, качество подготовки лыжных трасс.
В то время как большой объем доступной информации улучшает условия безопасности и качество лыжных трасс, эта информация отображается на одном или более экранах внутри кабины, и, в результате, водитель гусеничного транспортного средства отводит свои глаза от трассы и теряет визуальное управление на период времени.
В публикации DE 102017203528 A1 раскрыт способ, включающий этап определения сигнала потребности в освещении, представляющего потребность в свете в, по меньшей мере, одной области, и этап предоставления сигнала освещения для приведения в действие по меньшей мере одного прожектора системы освещения с использованием сигнала потребности в освещении для освещения требуемой области.
В публикации ЕР 1331198 А1 раскрыто светоизлучающее и/или светоотражающее средство, предназначенное для троса лебедки, позволяющее распознавать трос лебедки в темноте по всей длине троса.
Вышеупомянутые решения повышают безопасность водителя и людей, находящихся рядом с транспортным средством, но водителю по-прежнему необходимо отводить взгляд от трассы и на некоторое время отказываться от визуального вождения.
Сущность изобретения
Одной целью настоящего изобретения является создание гусеничного транспортного средства для лыжных трасс, которое уменьшает недостатки предшествующего уровня техники.
В соответствии с настоящим изобретением предоставляется гусеничное транспортное средство для лыжных трасс, гусеничное транспортное средство содержит:
- раму;
- кабину;
- две гусеницы;
- пользовательский интерфейс, расположенный в кабине;
- по меньшей мере, один датчик, выполненный с возможностью получения, по меньшей мере, одного сигнала из сигналов, взаимосвязанных с работой гусеничного транспортного средства, сигналов, взаимосвязанных с погодными и/или снежными условиями, и сигналов, взаимосвязанных с позицией гусеничного транспортного средства относительно ориентирных точек и/или возможных препятствий;
- блок управления, выполненный с возможностью обработки сигнала и выдачи, по меньшей мере, одного дополнительного сигнала; и
- по меньшей мере, один проектор контурных лучей и/или изображений, выполненный с возможностью проецирования, по меньшей мере, одного контурного луча и/или изображения, в зависимости от дополнительного сигнала, на поверхности снаружи кабины (в частности, на лыжную трассу) для того, чтобы предоставлять, по меньшей мере, одну часть информации в графической или буквенно-цифровой форме водителю и/или людям, находящимся поблизости от гусеничного транспортного средства.
Таким образом, водитель гусеничного транспортного средства способен принимать информацию без отведения своих глаз от лыжной трассы.
Кроме того, некоторая информация может быть направлена другим людям, присутствующим на лыжной трассе, таким как, например, лыжники, которые должны быть предупреждены о каких-либо опасных ситуациях, или водители других гусеничных транспортных средств, которые находятся рядом.
В частности, пользовательский интерфейс содержит селектор для выбора одной или более частей информации, которая должна быть спроецирована за пределами кабины, из информации, связанной с: работой гусеничного транспортного средства, погодными и/или снежными условиями и позицией гусеничного транспортного средства относительно ориентирных точек и/или возможных препятствий.
Таким образом, водитель может выбирать, какую и сколько информации проецировать за пределами кабины, в зависимости от погодных условий, яркости освещения, видимости и возможно опасных ситуаций.
Та же самая информация дублируется на экране пользовательского интерфейса.
В частности, проектор выбирается из лазерного проектора, LED-проектора, лазерного/LED-проектора и галогенного проектора, чтобы создавать изображения высокого разрешения.
В частности, упомянутые датчики содержат: GPS-приемник для получения сигналов, взаимосвязанных с геолокацией и/или навигацией гусеничного транспортного средства; упомянутый блок управления выполнен с возможностью обрабатывать дополнительные сигналы, взаимосвязанные с позицией гусеничного транспортного средства относительно ориентирных точек лыжной трассы; упомянутый проектор выполнен с возможностью проецировать контурные лучи, которые освещают упомянутые ориентирные точки поблизости от гусеничного транспортного средства.
Таким образом, визуальное вождение обеспечивается посредством точного указания ориентирных точек с пользой увеличивающейся безопасности навигации.
В частности, упомянутые ориентирные точки содержат края лыжной трассы.
Таким образом, водитель имеет большее восприятие границ лыжной трассы.
В соответствии с одним вариантом осуществления настоящего изобретения, упомянутые ориентирные точки содержат разделительную линию между обработанным участком и необработанным участком лыжной трассы.
Таким образом, водитель может избегать повторной обработки ранее обработанной части трассы или пропуска обработки части трассы, которая еще не была обработана.
В частности, по меньшей мере, один из датчиков предоставляет, по меньшей мере, один сигнал, взаимосвязанный с погодными и/или снежными условиями, и блок управления выполнен с возможностью предоставлять дополнительные сигналы, взаимосвязанные с информацией о погодных условиях на лыжной трассе согласно, по меньшей мере, одному сигналу, взаимосвязанному с погодными и/или снежными условиями. Упомянутый проектор выполнен с возможностью проецировать контурные лучи или изображения на лыжную трассу, которые определяют информацию о снежных условиях в графической или буквенно-цифровой форме.
Информация о снежных условиях, такая как, например, глубина, температура и т.д., может быть использована для регулировки параметров фрезы. В соответствии с настоящим изобретением, водитель гусеничного транспортного средства имеет возможность получать эту информацию без обращения к экрану в кабине.
В частности, по меньшей мере, один из датчиков предоставляет, по меньшей мере, один сигнал, взаимосвязанный с позицией гусеничного транспортного средства относительно ориентирных точек и/или возможных препятствий, и упомянутый блок управления выполнен с возможностью предоставлять дополнительные сигналы, взаимосвязанные с позицией упомянутых препятствий относительно гусеничного транспортного средства согласно, по меньшей мере, одному сигналу, взаимосвязанному с позицией гусеничного транспортного средства относительно ориентирных точек и/или возможных препятствий. Упомянутый проектор выполнен с возможностью проецировать световые лучи, которые освещают упомянутые препятствия поблизости от гусеничного транспортного средства.
Простое освещение препятствий означает, что их легче идентифицировать на трассе.
В частности, по меньшей мере, один из датчиков предоставляет, по меньшей мере, один сигнал, взаимосвязанный с работой гусеничного транспортного средства, и упомянутый блок управления выполнен с возможностью предоставлять дополнительные сигналы, взаимосвязанные с информацией по рабочим данным гусеничного транспортного средства согласно, по меньшей мере, одному сигналу, взаимосвязанному с работой гусеничного транспортного средства. Упомянутый проектор выполнен с возможностью проецировать световые лучи, которые определяют информацию в графической или буквенно-цифровой форме, на лыжную трассу.
Это решение облегчает визуальное управление гусеничным транспортным средством.
Другой целью настоящего изобретения является создание способа для отображения информации для гусеничного транспортного средства для лыжных трасс, который устраняет недостатки предшествующего уровня техники.
Согласно настоящему изобретению предоставляется способ для отображения информации для гусеничного транспортного средства для лыжных трасс, включающий:
- получение, по меньшей мере, одного из сигналов, взаимосвязанных с работой гусеничного транспортного средства, сигналов, взаимосвязанных с погодными и/или снежными условиями, и сигналов, взаимосвязанных с позицией гусеничного транспортного средства относительно ориентирных точек и/или возможных препятствий;
- обработку, по меньшей мере, упомянутого сигнала и выдачу, по меньшей мере, одного дополнительного сигнала для управления, по меньшей мере, одним проектором, размещенным на борту гусеничного транспортного средства; и
- проецирование, по меньшей мере, одного контурного луча и/или одного изображения в зависимости от, по меньшей мере, одного дополнительного сигнала на поверхностях снаружи кабины (в частности, на лыжной трассе) для того, чтобы предоставлять, по меньшей мере, одну часть информации в графической или буквенно-цифровой форме водителю и/или людям поблизости от гусеничного транспортного средства.
Краткое описание чертежей
Дополнительные признаки и преимущества настоящего изобретения будут очевидны из последующего описания его неограничивающего варианта осуществления, со ссылкой на прилагаемые чертежи, на которых:
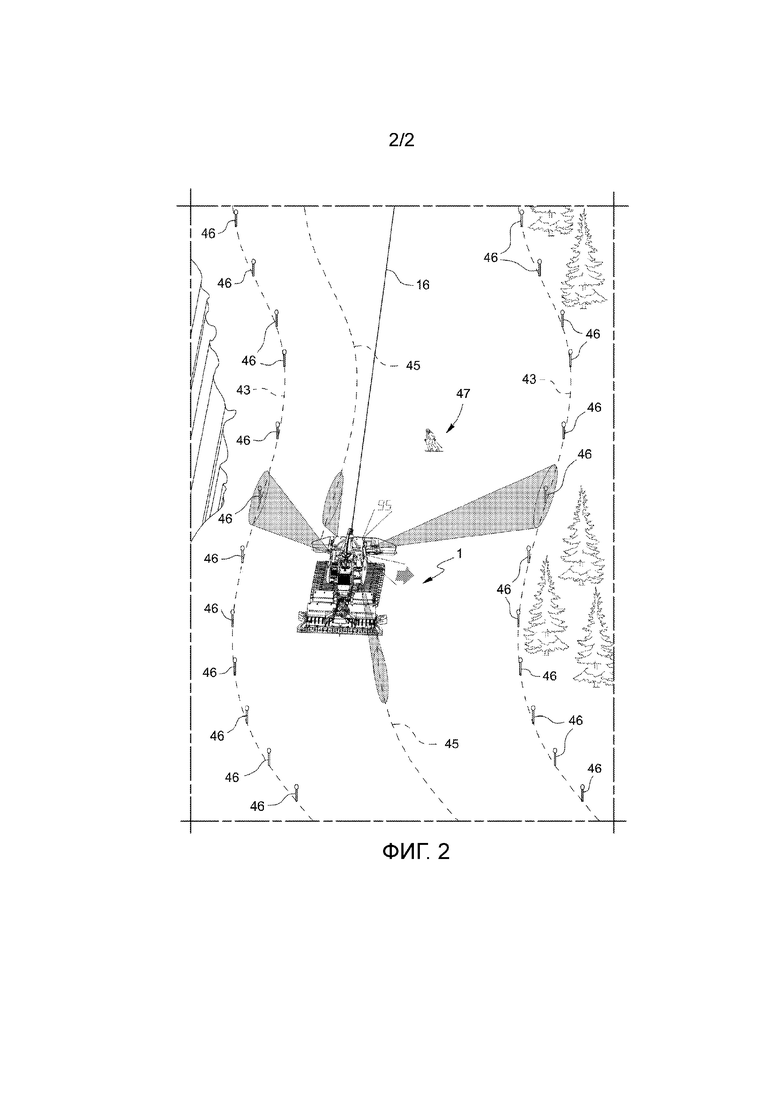
Фиг. 1 - вид сбоку в разрезе, с частями, удаленными для ясности, и объединенный с блок-схемой гусеничного транспортного средства для лыжных трасс, сконструированного в соответствии с настоящим изобретением; и
Фиг. 2 - вид в перспективе, сверху вниз, гусеничного транспортного средства с фиг. 1 на лыжной трассе, с частями, удаленными для ясности и в уменьшенном масштабе.
Наилучший способ осуществления изобретения
На фиг. 1 ссылочной позицией 1 обозначено в целом гусеничное транспортное средство для лыжных трасс, которое содержит раму 2; две гусеницы 3 (только одна показана на фиг. 1); два ведущих колеса 4 (только одно показано на фиг. 1), функционально соединенных с соответствующими гусеницами 3; натяжные колеса 5, поддерживающие гусеницы 3; кабину 6 и пользовательский интерфейс 7, размещенный в кабине 6. В настоящем изобретении определение «гусеничное транспортное средство» для лыжных трасс означает как гусеничное транспортное средство, используемое для транспортировки людей по лыжным трассам, так и гусеничное транспортное средство, содержащее, по меньшей мере, одну единицу оборудования для подготовки лыжных трасс и вспомогательную единицу оборудования.
В случае, показанном здесь, гусеничное транспортное средство 1 содержит две единицы оборудования для подготовки лыжной трассы: ковш 8, поддерживаемый рамой 2 на передней стороне; и фрезу 9, поддерживаемую рамой 2 на задней стороне. Гусеничное транспортное средство 1 содержит вспомогательную единицу оборудования, в этом случае узел 10 лебедки, закрепленный над рамой 2 позади кабины 6 для закрепления гусеничного транспортного средства, когда оно движется вверх или вниз по очень крутым склонам.
Гусеничное транспортное средство 1 содержит двигатель 11 и силовую передачу 12, которая функционально соединяется с двигателем 11, с ведущими колесами 4, с ковшом 8, с фрезой 9 и с узлом 10 лебедки. Силовая передача 12 может быть гидравлической или электрической или сочетанием гидравлической и электрической.
Гусеничное транспортное средство 1 содержит блок 13 управления, соединенный с пользовательским интерфейсом 7 и выполненный с возможностью управлять гусеничным транспортным средством 1, ковшом 8, фрезой 9 и узлом 10 лебедки.
Узел 10 лебедки содержит опорную конструкцию 14, установленную на раму 2; зубчатый барабан 15, поддерживаемый опорной конструкцией 14 поворотным образом вокруг оси A1; трос 16 с одним концом, прикрепленным к зубчатому барабану 15 и частично намотанный вокруг зубчатого барабана 15; направляющую 17 троса для управления тросом 16, когда он разматывается с зубчатого барабана 15 и наматывается на зубчатый барабан 15. В случае, показанном здесь, опорная конструкция 14 содержит основание 18, присоединенное к раме 2, и стрелу 19, установленную поворотным образом на основание 18 вокруг оси A2 для направления троса 16 к точке закрепления троса 16, независимо от ориентации гусеничного транспортного средства 1 относительно точки закрепления (не показана на присоединенных чертежах). Основание 18 поддерживает зубчатый барабан 15, натяжной шкив 20, который может вращаться вокруг оси A3, которая является параллельной оси A1 зубчатого барабана 15, и направляющую 17 троса, которая размещается между зубчатым барабаном 15 и натяжным шкивом 20 и имеет стрелу, которая может поворачиваться вокруг оси A4. Стрела 19 содержит натяжные шкивы 21, 22 и 23.
Опорная конструкция 14 содержит пятое колесо 24, размещенное между основанием 18 и стрелой 19; моторизованный механизм 25, функционально соединенный с пятым колесом 24 для выборочного поворота стрелы 19 вокруг оси A2 относительно основания 18 посредством моторизованного механизма 25; и датчик 26 для получения позиции стрелы 19 относительно основания 18.
Лебедочная группа 1 также содержит группу 27 актуаторов, которая функционально соединяется с зубчатым барабаном 15 и предназначается, чтобы вращать зубчатый барабан 15 вокруг оси A1 в противоположных направлениях; и датчик 28, который соединяется с зубчатым барабаном 15 для обнаружения позиции зубчатого барабана 15 вокруг оси A1. В действительности, угловая позиция зубчатого барабана 15 предоставляет возможность вам вычислять количество троса 16, намотанного на зубчатый барабан 15, и количество размотанного троса 16.
Гусеничное транспортное средство 1 содержит дополнительные датчики: угловой датчик 29 для обнаружения угловой позиции шкива 20; угловой датчик 30 для обнаружения угловой позиции стрелы направляющей 17 троса; датчики 31 и 32 для обнаружения, соответственно, рабочей глубины фрезы 9 и размера камеры рециркуляции фрезы 9 (расстояния между валом фрезы и кривошипной коробкой); датчики 33 для обнаружения функциональных признаков двигателя 11; датчики 34 для обнаружения скорости гусениц 3; и датчик 36 для обнаружения натяжения 16 троса.
Датчики, описанные выше, имеют функцию получения сигналов, взаимосвязанных с данными о работе гусеничного транспортного средства 1 и, возможно, оборудования, такого как ковш 8, фреза 9 и узел 10 лебедки.
Гусеничное транспортное средство 1 также содержит датчики (не показаны на присоединенных чертежах) для получения сигналов, взаимосвязанных с погодными условиями, такими как наружная температура, влажность и другие физические величины окружающей среды, в которой гусеничное транспортное средство 1 работает.
Гусеничное транспортное средство 1 содержит датчики (не показаны) для получения сигналов, взаимосвязанных со снежными условиями, и высоты снега.
Гусеничное транспортное средство 1 оборудуется датчиками для получения сигналов, взаимосвязанных с морфологией окружающей среды и с какими-либо препятствиями неморфологической природы, такими как животные или растения.
В этом случае гусеничное транспортное средство 1 содержит датчик 37, GPS-приемник, для геолокации и навигации гусеничного транспортного средства 1. Сигналы, предоставляемые посредством GPS, по существу, соотносятся с геолокацией относительно абсолютной системы координат. Информация, полученная через GPS-приемник, предоставляет возможность определения позиции гусеничного транспортного средства 1 относительно ориентирных точек, присутствующих на картах и/или сохраненных в памяти внутри блока 13 управления и характерных для трассы или для горнолыжного курорта, где гусеничное транспортное средство 1 работает.
Гусеничное транспортное средство 1 содержит датчик 38, такой как инфракрасная камера, лидар, твердотельный лидар, стереокамера для получения сигналов, взаимосвязанных с присутствием людей поблизости от гусеничного транспортного средства 1; и датчики 39 и 40, такие как лазер и радар для получения сигналов, взаимосвязанных с присутствием препятствий поблизости от гусеничного транспортного средства 1.
Блок 13 управления принимает и обрабатывает сигналы, полученные от датчиков 26, …, 40, чтобы предоставлять диапазон информации в соответствии с режимами отображения пользовательского интерфейса 7.
Гусеничное транспортное средство 1 содержит проекторы 41 для проецирования контурных лучей или изображений, которые определяют информацию о поверхности снаружи кабины 6 и поблизости от гусеничного транспортного средства 1.
Со ссылкой на настоящее изобретение, термин «информация» понимается в широком смысле как содержащий буквенно-цифровое представление, которое люди могут интерпретировать, или инфографику или просто освещение ориентирных точек и подвижных или неподвижных препятствий поблизости от гусеничного транспортного средства 1, которые в ином случае будут не видны или не будут легко заметны лицам поблизости от гусеничного транспортного средства и водителю гусеничного транспортного средства.
Со ссылкой на настоящее изобретение, «проектор» означает проектор, выполненный с возможностью проецировать контурные лучи, изображения или буквенно-цифровые представления, такой как лазерные проекторы, LED-проекторы, галогенные проекторы, лазерные проекторы для шоу, LED-матрицы и лазерные световые матрицы.
Согласно одному варианту осуществления настоящего изобретения гусеничное транспортное средство 1 имеет селектор 42, который предоставляет возможность водителю выбирать, какую информацию проецировать снаружи кабины 6, согласно своим собственным предпочтениям и условиям освещения и видимости.
В использовании блок 13 управления обрабатывает сигналы, полученные от датчиков 26, …, 40, чтобы формировать дополнительные сигналы, которые конфигурируются, чтобы управлять проекторами 41, так что они проецируют информацию на поверхности снаружи кабины 6.
Например, сигнал, предоставляемый угловым датчиком 28, который в этом случае является абсолютным кодером для получения абсолютного числа оборотов зубчатого барабана 15, используется для вычисления дополнительного сигнала, взаимосвязанного с остаточной длиной троса 16 (информация), намотанного на зубчатый барабан 15, в зависимости от геометрии зубчатого барабана 15 (числа слоев намотанного троса 16 и числа витков для каждого слоя намотанного троса). Эта информация представляется посредством контурных лучей на лыжной трассе в графической или буквенно-цифровой форме.
Согласно другому примеру, сигнал, предоставляемый датчиком 28, используется для вычисления скорости намотки на зубчатый барабан 15 (как функции времени и слоя намотки) и сравнивается со скоростью 16 троса на шкиве 20 как функцией диаметра шкива 20 и угловой скорости шкива 20, которая вычисляется как функция сигнала, предоставляемого угловым датчиком 29, и времени. Если две скорости 16 троса в двух различных точках маршрута 16 троса отличаются друг от друга, и разница превышает пороговый диапазон, тогда была проблема намотки троса 16 на зубчатый барабан 15, и блок 13 управления выдает дополнительный сигнал, в этом случае, особый сигнал ошибки, чтобы визуально и/или звуковым образом предупреждать водителя о технической проблеме, касающейся лебедки 10. Проекторы 41 конфигурируются, чтобы проецировать контурные лучи или изображения, представляющие сообщения об ошибках, на лыжной трассе в зависимости от дополнительных сигналов.
В целом, вышеупомянутая техническая проблема лебедки 10 возникает, когда тяговое усилие, прикладываемое к тросу 16, является слишком низким, и трос 16, намотанный вокруг зубчатого барабана 15, имеет тенденцию, вследствие свойственной ему жесткости, независимо разматываться беспорядочным образом.
Сигнал, формируемый датчиком 28, в частности, абсолютным кодером, обрабатывается с помощью сигнала, предоставляемого датчиком 30, как правило, угловым датчиком, чтобы проверять, является ли позиция стрелы направляющей 17 троса и позиция намотки на зубчатый барабан 15 согласующейся с предварительно определенным пространственным соотношением. Если это пространственное соотношение не соблюдается, блок 13 управления выдает сигнал ошибки, чтобы визуально (в соответствии с настоящим изобретением) и звуковым образом предупреждать водителя о неисправности лебедки 10.
В качестве функции разницы скоростей гусениц 3 блок 13 обработки предоставляет сигнал направления, который проектор 41 проецирует как графический знак, например, стрелку (фиг. 2) на снежном покрове, так что какие-либо люди поблизости от гусеничного транспортного средства 1 воспринимают изменение в направлении гусеничного транспортного средства 1 заранее.
Сигналы, взаимосвязанные со скоростью гусениц 3, которые предоставляются датчиками 34, сравниваются с сигналами скорости гусеничного транспортного средства 1, предоставляемыми датчиком 37, который в этом случае является спутниковым GPS-приемником, в блоке 13 управления, чтобы обрабатывать дополнительный сигнал, взаимосвязанный с боковым скольжением гусеничного транспортного средства 1, чтобы представлять информацию в графической или буквенно-цифровой форме посредством световых лучей.
Сигналы, сформированные датчиком 37, GPS-приемником, обрабатываются в блоке 13 управления, чтобы предоставлять дополнительные сигналы, взаимосвязанные с дополнительными сигналами, взаимосвязанными с позицией гусеничного транспортного средства 1 относительно ориентирных точек, таких как, например, края 43 лыжной трассы 44 (фиг. 2), и, возможно, относительно разделительной линии 45, которая отделяет обработанный участок лыжной трассы 44 от необработанного участка (фиг. 2), и дополнительные сигналы, взаимосвязанные со скоростью и направлением движения гусеничного транспортного средства 1. Сигналы, предоставляемые датчиком 37, соответственно обработанные посредством блока 13 управления, предоставляют дополнительные сигналы, взаимосвязанные с высотой снега в точке, где гусеничное транспортное средство 1 находится. Ориентирные точки освещаются световыми лучами, формируемыми прожекторами 41, чтобы увеличивать их видимость, в то время как информация о высоте снега определяется графическим и буквенно-цифровым образом посредством других контурных лучей или изображений.
Проекторы 41 гусеничного транспортного средства 1 являются приспособленными для освещения разделительной линии 45, включая в себя разделительную линию ниже по потоку от гусеничного транспортного средства 1, так что она может быть видна другим гусеничным транспортным средствам (не показаны), движущимся на коротком расстоянии позади гусеничного транспортного средства 1, и так что она может определять ориентирную точку для последнего.
Кроме того, сигналы, предоставляемые посредством GPS, предоставляют возможность вам знать позицию снежных установок (не показаны на присоединенных чертежах) и размещенных вдоль лыжной трассы, и которые, следовательно, определяют препятствия для гусеничного транспортного средства 1. На основе этих сигналов проектор 41 освещает препятствие, так что водитель может планировать свои маневры для избегания препятствия.
Сигнал, предоставляемый посредством GPS, может также быть использован для идентификации точки закрепления (не показана на присоединенных чертежах) троса 16 узла 10 лебедки. Точка закрепления может быть засыпана снегом, и, по этой причине, может не быть легко идентифицируемой. GPS-сигнал, в сочетании с картами горнолыжного курорта, сохраненными в спутниковом GPS-приемнике 37 или в блоке 13 обработки, предоставляет сигналы о позиции точек закрепления, и блок 13 обработки предоставляет дополнительный сигнал, чтобы управлять проектором 41 таким образом, что он направляет относительно связанный луч света на точку, где точка закрепления располагается.
Сигналы, формируемые датчиками 38, 39 и 40, сопоставляются с позицией каких-либо живых или неживых препятствий и обрабатываются, при необходимости, блоком 13 управления, чтобы предоставлять дополнительные сигналы, взаимосвязанные с позицией упомянутых препятствий относительно гусеничного транспортного средства 1. Препятствия также освещаются световыми лучами, чтобы повышать их видимость.
Другие сигналы, полученные от датчиков 26, …, 40, обрабатываются блоком 13 управления, чтобы формировать дополнительные управляющие сигналы для проекторов 41: сигнал тяги троса 16, сигнал рабочей глубины фрезы 9, сигнал, взаимосвязанный с размером рабочей камеры (расстоянием между осью вращения и кривошипной коробкой) фрезы 9. Эта информация может быть представлена посредством контурных лучей и/или изображений на лыжной трассе 44 в графической или буквенно-цифровой форме посредством проекторов 41. С этой целью, является предпочтительным иметь проектор 41 внутри кабины 7 типа BenQ LU9715 BlueCore Laser Projector или лазер Hyperion для анимаций с 10 каналами DMX или LED-матрицей, сконфигурированный для проецирования на лыжную трассу 44.
Водитель гусеничного транспортного средства 1 выбирает, в зависимости от погодных условий, в частности, условий освещения и видимости, какую информации лучше всего проецировать на лыжную трассу 44.
Как показано на фиг. 2, гусеничное транспортное средство 1 движется по лыжной трассе 44, ограниченной краями 43 и частично обработанной посредством предыдущего прохождения другого гусеничного транспортного средства, не показано на присоединенных чертежах. Края 43 лыжной трассы 44 являются виртуальными линиями, предпочтительно, расцвеченными, которые проходят через точки, определенные соответствующими шестами 46, которые специально закрепляются, чтобы ограничивать лыжную трассу 44.
Водитель различает обработанный участок лыжной трассы от необработанного участка лыжной трассы, когда условия видимости и освещения являются хорошими. Блок 13 управления может получать навигационные данные от предыдущего гусеничного транспортного средства (не показано на присоединенных чертежах), чтобы формировать дополнительный сигнал, взаимосвязанный с позицией разделительной линии 45, которая отделяет обработанный участок лыжной трассы 44 от необработанного участка.
В случае, показанном на фиг. 2, на лыжной трассе 44 есть лыжник 47, который идентифицируется посредством инфракрасной камеры 38 и возможно освещается проектором 41.
Если узел 10 лебедки используется, проектор 41, установленный на стреле 19, приводится в действие, чтобы освещать трос 16.
В случае, показанном на фиг. 2, водитель выбрал селектор 42, чтобы проецировать некоторую информацию снаружи гусеничного транспортного средства 1: проекторы 41 проецируют/освещают края 43 лыжной трассы 44 поблизости от гусеничного транспортного средства 1 и в поле обзора водителя; проекторы 41 проецируют/освещают разделительную линию 45 между обработанным участком лыжной трассы 44 и необработанным участком; проектор 41 проецирует высоту снежного покрова на лыжной трассе 44; и проектор 41 освещает трос 16 связанным лучом с тем, чтобы делать трос 16 более видимым для лыжника 47. Проецирование/освещение краев 43 и 45 определяет точные ориентирные точки для водителя и удерживает его далеко от обрывов, которые могут находиться поблизости от лыжной трассы 44. Разделительная линия 45 освещается как выше по потоку, так и ниже по потоку от гусеничного транспортного средства 1.
Прожекторы 41 выбираются из: лазерных проекторов; LED-проекторов; лазерных/LED-проекторов; галогенных проекторов с высокой степенью четкости изображения с тем, чтобы четко определять данные, проецируемые на лыжную трассу 44 и точно определять края 43 и разделительную линию 45 самой лыжной трассы 44.
Освещение препятствий, включающих в себя трос 16, предназначается, чтобы информировать водителя гусеничного транспортного средства 1, и любых других людей поблизости от гусеничного транспортного средства 1, таких как лыжники или водители других гусеничных транспортных средств, о наличии препятствий.
Дополнительно, ясно, что настоящее изобретение также охватывает варианты осуществления, которые не описаны в подробном описании и эквивалентных вариантах осуществления, которые попадают в рамки защиты прилагаемых вариантов осуществления.

Группа изобретений относится к области машиностроения, в частности к гусеничным транспортным средствам для лыжных трасс. Гусеничное транспортное средство (ГТР) содержит раму, кабину, две гусеницы, пользовательский интерфейс, расположенный в кабине, датчик, блок управления, проектор. Способ отображения информации для ГТР, при котором: получают сигналы, обрабатывают и выдают сигналы, и проецируют контурные лучи или изображение чтобы предоставлять информацию в графической форме водителю и людям поблизости на стежной трассе. Сигналы могут получать о работе ГТР, о погодных условиях, о позиции ГТР, о возможных препятствиях. Сигналы выдают для управления проектором контурных лучей или изображений. Достигается повышение безопасности. 2 н. и 15 з.п. ф-лы, 2 ил.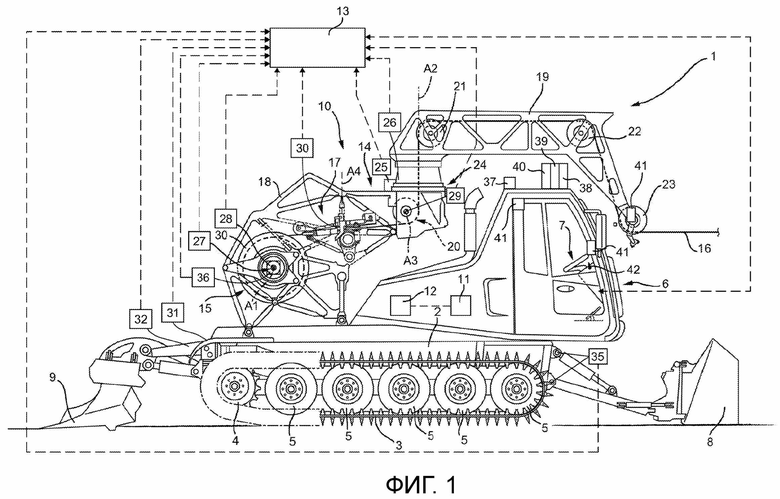
1. Гусеничное транспортное средство (1) для лыжных трасс, содержащее:
- раму (2);
- кабину (6);
- две гусеницы (3);
- пользовательский интерфейс (7), расположенный в кабине (6);
- по меньшей мере, один датчик (26; …; 40), выполненный с возможностью получения, по меньшей мере, одного сигнала из сигналов, взаимосвязанных с работой гусеничного транспортного средства (1), сигналов, взаимосвязанных с погодными и/или снежными условиями, и сигналов, взаимосвязанных с позицией гусеничного транспортного средства (1) относительно ориентирных точек и/или возможных препятствий;
- блок (13) управления, выполненный с возможностью обработки сигнала и выдачи, по меньшей мере, одного дополнительного сигнала; и,
- по меньшей мере, один проектор (41) контурных лучей и/или изображений, выполненный с возможностью проецирования на поверхности снаружи кабины (6), в частности на лыжной трассе (44), по меньшей мере, одного контурного луча и/или одного изображения в зависимости от дополнительного сигнала, чтобы предоставлять, по меньшей мере, одну часть информации в графической или буквенно-цифровой форме водителю и/или людям поблизости от гусеничного транспортного средства (1).
2. Гусеничное транспортное средство по п. 1, в котором пользовательский интерфейс (7) включает в себя селектор (42), чтобы выбирать одну или более частей информации для проецирования снаружи кабины (6) из информации, связанной с: работой гусеничного транспортного средства (1), погодными и/или снежными условиями и позицией гусеничного транспортного средства (1) относительно ориентирных точек и/или возможных препятствий.
3. Гусеничное транспортное средство по п. 1 или 2, в котором проектор (41) контурных лучей и/или изображений выбран из лазерного проектора, LED-проектора и лазерного/LED-проектора.
4. Гусеничное транспортное средство по любому из предшествующих пунктов, в котором датчики (26, …, 40) включают в себя GPS-приемник для получения сигналов, взаимосвязанных с геолокацией и/или навигацией гусеничного транспортного средства (1); причем блок (3) управления выполнен с возможностью обработки дополнительных сигналов, взаимосвязанных с позицией гусеничного транспортного средства (1) относительно ориентирных точек (44) лыжной трассы; а проектор (41) контурных лучей и/или изображений выполнен с возможностью проецирования контурных лучей, которые освещают ориентирные точки (43; 45) поблизости от гусеничного транспортного средства (1).
5. Гусеничное транспортное средство по п. 4, в котором ориентирные точки включают в себя края (43) лыжной трассы (44).
6. Гусеничное транспортное средство по п. 4 или 5, в котором ориентирные точки включают в себя разделительную линию (45) между обработанным участком и необработанным участком лыжной трассы (44).
7. Гусеничное транспортное средство по любому из предшествующих пунктов, в котором, по меньшей мере, один из датчиков (26; …; 40) выдает, по меньшей мере, один сигнал, взаимосвязанный со снежными условиями; блок (13) управления выполнен с возможностью определения дополнительных сигналов, взаимосвязанных с информацией о снежных условиях, в зависимости от сигнала, взаимосвязанного со снежными условиями; проектор (41) выполнен с возможностью проецирования на лыжную трассу (44) контурных лучей или изображений, которые определяют информацию в графической или буквенно-цифровой форме о снежных условиях.
8. Гусеничное транспортное средство по любому из предшествующих пунктов, в котором, по меньшей мере, один из датчиков (26; …; 40) выдает, по меньшей мере, один сигнал, взаимосвязанный с позицией гусеничного транспортного средства (1) относительно ориентирных точек и/или возможных препятствий; блок (13) управления выполнен с возможностью выдачи дополнительных сигналов, взаимосвязанных с позицией ориентирных точек и/или препятствий относительно гусеничного транспортного средства (1) согласно, по меньшей мере, одному сигналу, взаимосвязанному с позицией гусеничного транспортного средства (1) относительно ориентирных точек и/или возможных препятствий; а проектор (41) контурных лучей и/или изображений выполнен с возможностью проецирования световых лучей, которые освещают ориентирные точки и/или препятствия поблизости от гусеничного транспортного средства (1).
9. Гусеничное транспортное средство по любому из предшествующих пунктов, в котором, по меньшей мере, один из датчиков (26; …; 40) выдает, по меньшей мере, один сигнал, взаимосвязанный с работой гусеничного транспортного средства (1); блок (13) управления выполнен с возможностью выдачи дополнительных сигналов, взаимосвязанных с информацией по рабочим данным гусеничного транспортного средства (1), по меньшей мере, на основе одного сигнала, взаимосвязанного с работой гусеничного транспортного средства (1); а проектор (41) контурных лучей и/или изображений выполнен с возможностью проецирования на лыжную трассу (44) световых лучей, которые определяют информацию в графической или буквенно-цифровой форме.
10. Способ отображения информации для гусеничного транспортного средства, при котором:
- получают, по меньшей мере, один сигнал из сигналов, взаимосвязанных с работой гусеничного транспортного средства (1), сигналов, взаимосвязанных с погодными и снежными условиями, и сигналов, взаимосвязанных с позицией гусеничного транспортного средства (1) относительно ориентирных точек и/или возможных препятствий;
- обрабатывают, по меньшей мере, этот сигнал и выдают, по меньшей мере, один дополнительный сигнал для управления, по меньшей мере, одним проектором (41) контурных лучей и/или изображений, установленным на гусеничном транспортном средстве (1); и
- проецируют, по меньшей мере, один контурный луч и/или одно изображение в зависимости от, по меньшей мере, одного дополнительного сигнала, чтобы предоставлять, по меньшей мере, одну часть информации в графической или буквенно-цифровой форме водителю и/или людям поблизости от гусеничного транспортного средства (1) на поверхностях снаружи кабины (6), в частности, на лыжной трассе (44).
11. Способ по п. 10, при котором выбирают, по меньшей мере, одну часть информации для проецирования на поверхностях снаружи кабины (6) из информации, связанной с: работой гусеничного транспортного средства (1), погодными и/или снежными условиями и/или позицией гусеничного транспортного средства (1) относительно ориентирных точек и/или возможных препятствий.
12. Способ по п. 10 или 11, при котором проектор (41) выбирают из лазерного проектора, LED-проектора, лазерного/LED-проектора и галогенного проектора.
13. Способ по любому из пп. 10-12, при котором:
- получают сигналы, взаимосвязанные с геолокацией и/или навигацией гусеничного транспортного средства (1);
- определяют дополнительные сигналы, взаимосвязанные с позицией гусеничного транспортного средства относительно ориентирных точек (44) лыжной трассы поблизости от гусеничного транспортного средства (1) на основе сигналов, взаимосвязанных с геолокацией и/или навигацией гусеничного транспортного средства; и
- проецируют световые лучи, чтобы освещать ориентирные точки посредством проектора (41) контурных лучей и/или изображений поблизости от гусеничного транспортного средства (1).
14. Способ по п. 13, при котором ориентирные точки включают в себя края (43) лыжной трассы (44).
15. Способ по п. 13 или 14, при котором ориентирные точки включают в себя разделительную линию (45) между обработанным участком и необработанным участком лыжной трассы (44).
16. Способ по любому из пп. 10-15, при котором:
- получают сигналы, взаимосвязанные с геолокацией и/или навигацией гусеничного транспортного средства (1);
- определяют дополнительные сигналы, взаимосвязанные с позицией препятствия относительно гусеничного транспортного средства (1), из сигналов, взаимосвязанных с геолокацией и навигацией гусеничного транспортного средства (1);
- проецируют световые лучи, чтобы освещать препятствия поблизости от гусеничного транспортного средства (1).
17. Способ по любому из пп. 10-16, при котором:
- получают сигнал, взаимосвязанный с работой гусеничного транспортного средства (1);
- выдают дополнительные сигналы, взаимосвязанные с информацией по рабочим данным гусеничного транспортного средства (1), по меньшей мере, на основе сигнала, полученного и взаимосвязанного с работой гусеничного транспортного средства (1); и
- проецируют на гусеничную трассу (44) контурные лучи или изображения, которые определяют информацию в графической или буквенно-цифровой форме.
| DE 102017203528 A1, 06.09.2018 | |||
| EP 1331198 A1, 30.07.2003 | |||
| DE 102011119923 A1, 29.05.2013 | |||
| СПОСОБ УСТРАНЕНИЯ МОРЩИН И СКЛАДОК КОЖИ ЛИЦА | 1993 |
|
RU2071281C1 |
| СИСТЕМА ПОДСВЕТКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СПОСОБ ПОДСВЕТКИ НАРУЖНОЙ ОБЛАСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2702375C2 |
