Изобретение относится к манипуляторным лесным машинам, а также может быть использовано в модульных конструкциях машин многоотраслевого назначения: экскаваторов, сельскохозяйственных, землеройных, торфяных, мелиоративных, водных, горных, строительных, дорожно-строительных, подъемно-транспортных и иных машин с манипуляторами и рабочими органами на них. В лесном комплексе техническое решение относится к комплексам машин и оборудования для несплошных рубок главного пользования и рубок ухода в средневозрастных и приспевающих древостоях. Со сменными кусторезами может быть использовано при рубках осветления и прореживания в хвойно-лиственных молодняках.
Известен способ, включающий динамическое уравновешивание противоположно действующими двумя манипуляторами с рабочими органами на их конце разного функционального назначения, и манипуляторная машина по патенту 1808261, содержащая самоходное шасси, раму с поворотной платформой и два манипулятора со стойками и рабочими органами, причем манипуляторы установлены на общей полноповоротной платформе, а стрелы их шарнирно соединены между собой тягами, расположенными в вертикальной плоскости, и перекрестие относительно стрел.
Недостатками являются неодновременное выполнение способа и сложность конструкции, а также функциональная избыточность в реализации способа поведения, так как каждый манипулятор при работе другого выполняет функцию только контргруза, синхронно уравновешивающего работающее манипуляторное оборудование.
Известен также способ динамического уравновешивания по положительному решению по заявке 93-015535, предусматривающий достижение компактности базового модуля манипуляторной лесной машины автоматическим опусканием опорной пяты на землю при увеличении вылета рабочего органа. При применении того же базового модуля с полноповоротной платформой возможно увеличение вылета рабочего органа до 15-18 м, причем дальнейшему увеличению вылета 18-20 м и более мешает стационарно установленный на полноповоротной платформе контргруз.
Поэтому главным недостатком является неэффективное применение контргруза для динамического уравновешивания. Поэтому опорная пята опускается на поверхность почвы уже при малых вылетах рабочего органа.
Известно также устройство для динамического уравновешивания по заявке на изобретение 93-015535, которое содержит полноповоротную платформу, на стойках которой впереди шарнирно закреплена стрела манипулятора, а в нижней части стрелы дополнительно закреплен телескопический двухзвенник с опорной пятой, при этом опорное звено шарнирными тягами соединено с платформой.
Указанные способ и устройство приведены в книге (Мазуркин П.М. Манипуляторные машины: учебное пособие. Йошкар-Ола: МарГТУ, 2001. 354 с. С.275-278. рис.7.22).
Недостатком является отсутствие конструктивных связей устройства по прототипу с контргрузом. Поэтому контргруз выполняет функцию только статического уравновешивания, а из-за этого телескопический двухзвенник с опорной пятой срабатывает раньше из-за смещения центра тяжести полноповоротной платформы и наклона ее со всеми механизмами и агрегатами гидросистемы и манипуляторного оборудования вперед. При этом два дополнительных механизма (по прототипу и удлинения рукояти) относительно утяжеляют манипулятор и это утяжеление нужно компенсировать динамически функционирующим контргрузом. В итоге не обеспечивается динамическое уравновешивание момента сил от функционирования рабочего органа с манипулятором на дальнем вылете постоянным противодействующим моментом от стационарного контргруза.
Кроме того, динамическое уравновешивание и устройство для этого могут быть применены и при обычных конструкциях манипуляторного оборудовании из разных отраслей природопользования.
Технический результат - повышение динамического уравновешивания манипуляторной лесной машины дополнительно за счет разделения контргруза на две равные части по массе и размерам, а также переменного вылета контргруза относительно продольной оси полноповоротной платформы манипуляторной лесной машины.
Этот технический результат достигается тем, что способ динамического уравновешивания манипуляторной лесной машины, включающий шарнирное закрепление манипуляторного оборудования на стойках спереди полноповоротной платформы с контргрузом, отличающийся тем, что контргруз разделяют, по крайней мере, на две части и устанавливают шарнирно на полноповоротной платформе, а для поворота в плоскости полноповоротной платформы части контргруза кинематическим механизмом шарнирно соединяют со стрелой манипулятора.
Обе части контргруза шарнирно устанавливают на общей вертикальной неподвижной оси, расположенной сзади полноповоротной платформы посередине ее ширины на продольной оси, проходящей через центр вращения полноповоротной платформы с манипуляторным оборудованием.
Устройство для динамического уравновешивания манипуляторной лесной машины, содержащее полноповоротную платформу, на стойках которой впереди шарнирно закреплена стрела манипулятора, отличающееся тем, что внутри имеющей хвостовики стрелы манипулятора по их концам шарнирно закреплена основная тяга кинематического механизма, причем второй конец основной тяги шарнирно соединен с переходником, к которому на двух вертикальных шарнирах присоединены две вспомогательные тяги, вторые концы которых шарнирно закреплены на сторонах двух частей контргруза.
По концам хвостовиков стрелы манипулятора с радиусом, обеспечивающим поворот обоих частей контргруза на 90°, шарнир выполнен в виде общей оси, размещаемой в отверстиях на концах хвостовиков, на которой по бокам основной тяги размещены две втулки.
Переходник выполнен прямоугольной формы с выемкой для размещения конца основной тяги на пальце с поворотом в вертикальной плоскости, а на противоположной стороне выполнены две угловые выемки для размещения концов двух вспомогательных тяг на пальцах для поворота.
При необходимости увеличения момента, противодействующему моменту от опрокидывающих сил, снизу к частям контргруза прикреплены дополнительные контргрузы.
Сущность технического решения заключается в разделении контргруза на две части и установки этих частей с возможностью симметричного вдоль продольной оси платформы поворота в горизонтальной плоскости внутри основания полноповоротной платформы.
Сущность технического решения заключается также в том, что этот поворот обеих частей контргруза выполняется от движения хвостовиков стрелы манипулятора.
Сущность технического решения заключается также и в том, что кинематический механизм поворота обоих частей контргруза позволяет отказаться от дополнительного привода.
Сущность технического решения заключается также и в том, что кинематический механизм расположен внутри хвостовиков стрелы манипулятора и полноповоротной платформы.
Положительный эффект достигается тем, что с ростом вылета рабочего органа и вытягивания манипулятора с поворотом вперед стрелы манипулятора автоматически выдвигаются разворотом назад обе части контргруза и это увеличивает момент сопротивления опрокидывающим силам от действия манипуляторного оборудования с предметом обработки, в частности, со срезанным деревом. Выдвигающиеся назад две части контргруза позволяют применять их как площадки для работы с двигателем и насосом, а также, из-за значительного пространства от полноповоротной платформы до поверхности грунта, обеспечивают прикрепление дополнительного контргруза. В итоге разделенный на две части контргруз позволяет выполнять дополнительные полезные технические функции.
Новизна технического решения заключается в том, что вертикальный поворот стрелы манипулятора через хвостовики и кинематический механизм передается двум частям контргруза для их последующего разворота в горизонтальной плоскости.
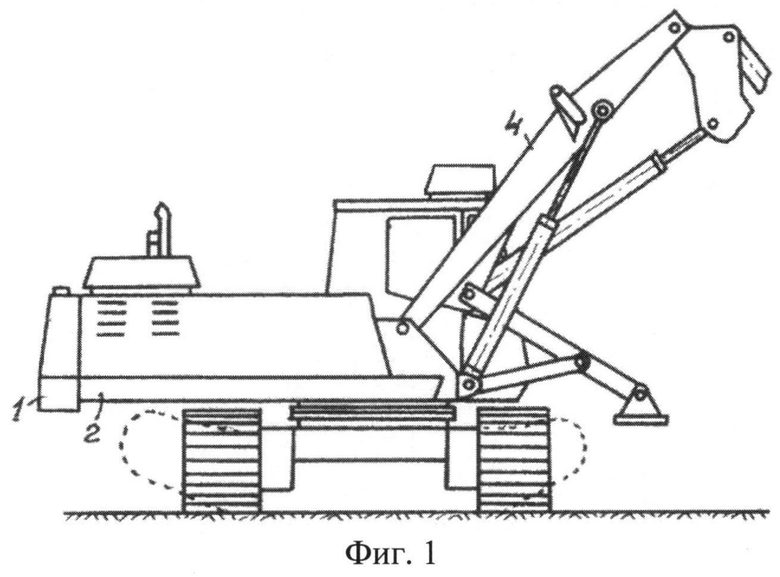
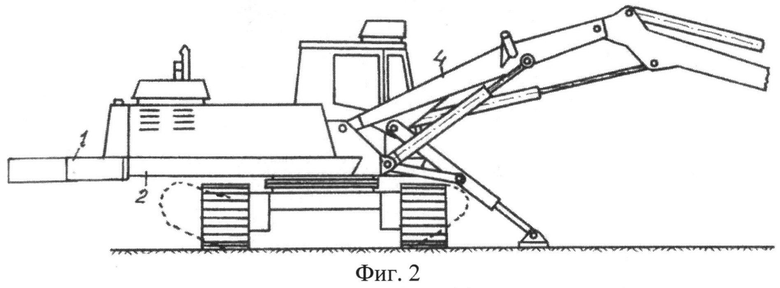
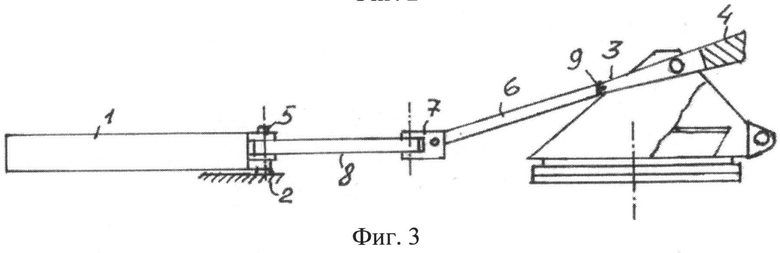
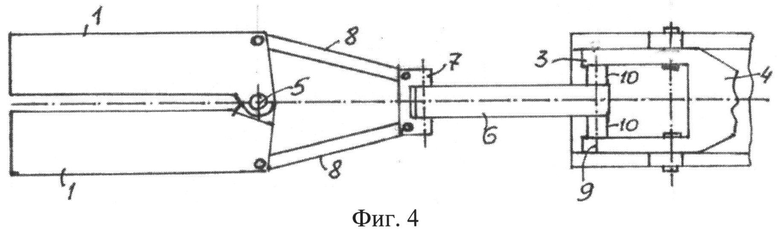
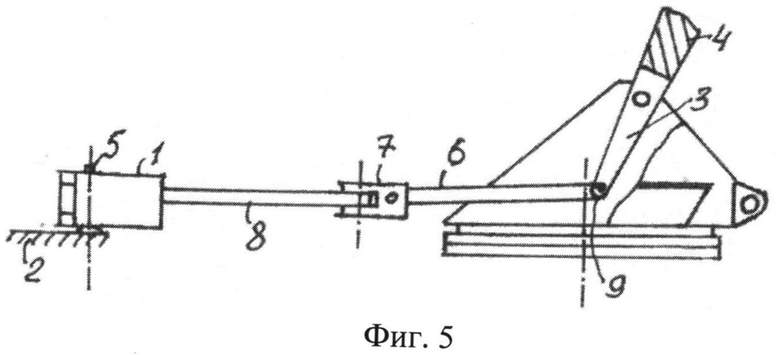
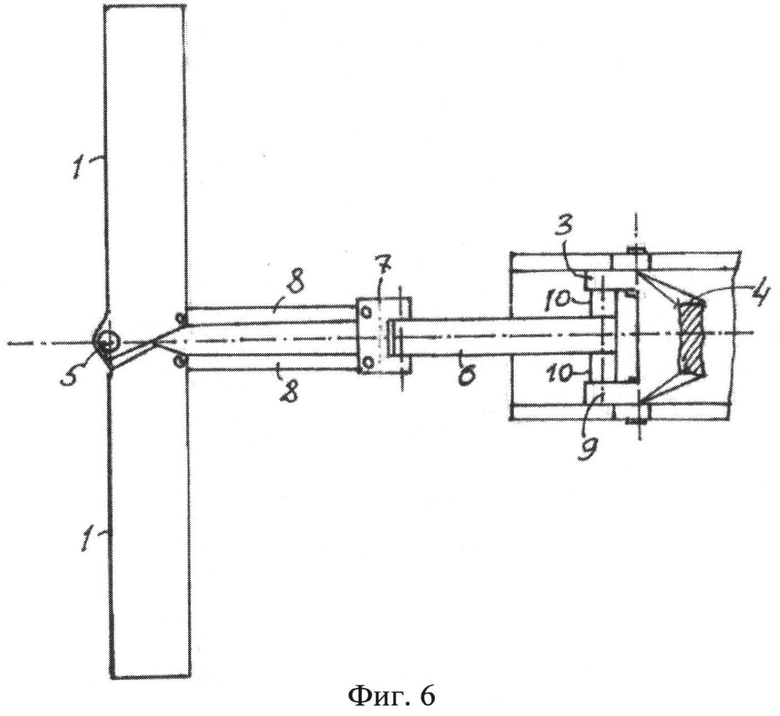
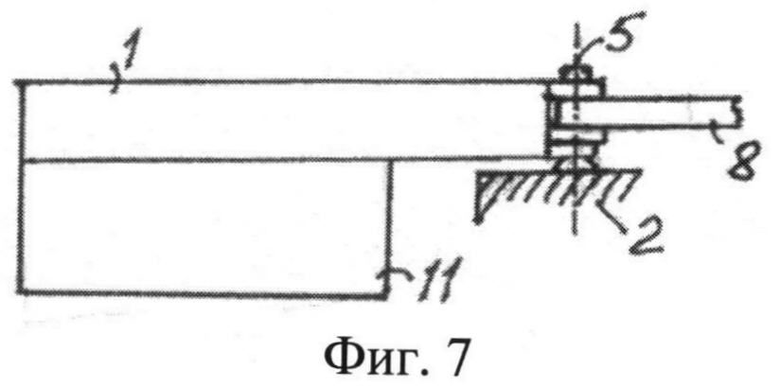
На фиг.1 показана предлагаемая лесная манипуляторная машина на базе ЛП-19В, вид сбоку на полноповоротную платформу при минимальном вылете рабочего и высоко поднятой стреле манипулятора; на фиг.2 - то же, что на фиг.1 при максимальном вылете рабочего органа и выдвинутых назад двух частях контргруза; на фиг.3 дан вид сбоку на кинематический механизм разворота двух частей контргруза при их вытянутом назад положении; на фиг.4 - то же, что на фиг.3 при виде сверху; на фиг.5 показан вид сбоку на кинематический механизм разворота двух частей контргруза при их втянутом (транспортном) положении; на фиг.6 - то же, что на фиг.5 при виде сверху; на фиг.7 показан одна часть контргруза с прикрепленным дополнительным контргрузом.
Способ динамического уравновешивания манипуляторной лесной машины включает следующие действия.
Контргруз 1 разделяют, по крайней мере, на две равные по массе и размерам части и их устанавливают шарнирно на полноповоротной платформе 2. Для поворота в плоскости полноповоротной платформы части контргруза кинематическим механизмом шарнирно соединяют с хвостовиками 3 стрелы 4 манипулятора. При этом обе части контргруза шарнирно устанавливают на общей вертикальной неподвижной оси 5, расположенной сзади полноповоротной платформы посередине ее ширины на продольной оси, проходящей через центр вращения полноповоротной платформы с манипуляторным оборудованием.
Устройство для динамического уравновешивания манипуляторной лесной машины содержит полноповоротную платформу, на стойках которой впереди шарнирно закреплена стрела манипулятора. Внутри стрелы манипулятора по концам хвостовиков шарнирно закреплена основная тяга 6 кинематического механизма, причем второй конец основной тяги шарнирно соединен с переходником 7, к которому на двух вертикальных шарнирах присоединены две вспомогательные тяги 8, вторыми концами шарнирно закреплены на сторонах двух частей контргруза.
По концам хвостовиков стрелы манипулятора с радиусом, обеспечивающим поворот обоих частей контргруза на 90°, шарнир выполнен в виде общей оси 9, размещаемой в отверстиях на концах хвостовиков, на которой по бокам основной тяги размещены две втулки 10.
Переходник выполнен прямоугольной формы, с выемкой для размещения конца основной тяги на пальце с поворотом в вертикальной плоскости, а на противоположной стороне выполнены две угловые выемки для размещения концов двух вспомогательных тяг на пальцах для поворота.
Для увеличения момента против опрокидывающих сил, снизу к частям контргруза прикреплены дополнительные контргрузы 11.
Способ динамического уравновешивания манипуляторной машины реализуется, например, изготовленной на базе узлов, агрегатов и сборочных единиц валочно-пакетирующей машины типа ЛП-19В, следующими техническими действиями.
Контргруз 1 массой 3 т разделяют на две части и устанавливают шарнирно на полноповоротной платформе 2, а для поворота в плоскости полноповоротной платформы на 90° части контргруза кинематическим механизмом шарнирно соединяют со стрелой 4 манипулятора на ее хвостовиках 3. При этом обе части контргруза шарнирно устанавливают на общей вертикальной неподвижной оси 5, расположенной сзади полноповоротной платформы 2 посередине ее ширины на продольной оси, проходящей через центр вращения полноповоротной платформы с манипулятором и его рабочим оборудованием.
Валочно-пакетирующая машина с рабочим органом для валки и формирования пачки срезанных деревьев, например, на рубках прореживания лесных деревьев внутри средневозрастных древостоев, работает следующим образом.
Оператор доставляет рабочий орган к срезаемому дереву. Одновременно с этим при повороте стрелы 4 манипулятора вперед ее хвостовики 3 толкают кинематический механизм и части контргруза 1 назад.
С дальнейшим опусканием стрелы 4 (от втягивания гидроцилиндров поворота стрелы) выносная опора опускается до земли, а манипулятор становится прицепным. При необходимости включается гидроцилиндр этого аутригера (расположен внутри) и пята плотно опирается о поверхность грунта. После этого рабочий орган может выдвигаться дальше, а базовый модуль, вместе с выдвигающимися дальше назад двумя частями контргруза, становится противовесом относительно выносной опоры. Это позволяет без потери продольной устойчивости всей машины увеличить вылет до 18-20 м и более. Тогда появляется возможность срезания отведенных в рубку деревьев на пасеке (с двумя лентами) шириной до 35-40 м и более.
После срезания дерева или его части (по крупномерному дереву) рабочий орган с грузом подтягивается к машине. При этом стрела поднимается гидроцилиндрами и манипулятор, после отхода пяты аутригера от поверхности грунта, снова становится навесным. При этом части контргруза кинематическим механизмом поворачиваются к оси вращения платформы. После полного подтягивания стрелы к платформе части контргруза занимают поперечное положение в пределах габаритных размеров базового модуля предлагаемой валочно-пакетирующей машины. Далее платформу разворачивают, а лесоматериал сбрасывают на землю.
Оператор снова разворачивает платформу на следующее дерево так, чтобы оно находилось в плоскости манипулятора. Далее цикл работы (функционирования) повторяется.
Предлагаемый способ и устройство для его осуществления обладают существенной новизной и положительным эффектом. На основе применения предлагаемого технического решения возможно создать манипуляторную лесную машину с большим вылетом рабочего органа при меньшей размерной группе базовой транспортно-энергетической части. Например, вместо четвертой размерной группы базовой машины экскаваторного типа можно применять экскаваторы третьей размерной группы. При использовании в предлагаемой машине выносного аутригера можно применять и колесные движители с лесными шинами. Динамическое уравновешивание по предлагаемой конструкции с дополнением аутригером по прототипу позволит создавать валочно-пакетирующие машины с массой захватно-срезающего органа 300-500 кг при его вылете до 18-25 м для рубок прореживания лесных деревьев в средневозрастных древостоях.
| название | год | авторы | номер документа |
|---|---|---|---|
| БАЗОВЫЙ МОДУЛЬ МАНИПУЛЯТОРНОЙ МАШИНЫ | 2012 |
|
RU2522496C2 |
| МАШИНА ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАНИПУЛЯТОРНОГО ТИПА | 2011 |
|
RU2473210C1 |
| МАШИНА ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАНИПУЛЯТОРНОГО ТИПА | 2011 |
|
RU2473208C1 |
| МАШИНА МАНИПУЛЯТОРНАЯ | 2009 |
|
RU2420952C1 |
| Лесозаготовительная машина | 1990 |
|
SU1808261A1 |
| МАШИНА МАНИПУЛЯТОРНАЯ | 2011 |
|
RU2468954C1 |
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2251479C2 |
| СПОСОБ И МАШИНА ДЛЯ ФОРМИРОВАНИЯ ПАЧЕК ДЕРЕВЬЕВ | 2013 |
|
RU2550026C2 |
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2242115C2 |
| Лесозаготовительная машина | 1981 |
|
SU973077A1 |
Изобретение относится к манипуляторным лесным машинам, а также может быть использовано в модульных конструкциях машин многоотраслевого назначения: экскаваторов, сельскохозяйственных, землеройных, торфяных, мелиоративных, водных, горных, строительных, дорожно-строительных, подъемно-транспортных и иных машин с манипуляторами и рабочими органами на них. Способ включает шарнирное закрепление манипуляторного оборудования на стойках спереди полноповоротной платформы с контргрузом. Контргруз разделяют, по крайней мере, на две части и устанавливают шарнирно на полноповоротной платформе. Для поворота в плоскости полноповоротной платформы части контргруза кинематическим механизмом шарнирно соединяют со стрелой манипулятора. Устройство содержит полноповоротную платформу, на стойках которой впереди шарнирно закреплена стрела манипулятора. Внутри имеющей хвостовики стрелы манипулятора по их концам шарнирно закреплена основная тяга кинематического механизма. Второй конец основной тяги шарнирно соединен с переходником. К переходнику на двух вертикальных шарнирах присоединены две вспомогательные тяги, вторые концы которых шарнирно закреплены на сторонах двух частей контргруза. Технический результат - повышение динамического уравновешивания манипуляторной лесной машины. 2 н. и 4 з.п. ф-лы, 7 ил.
1. Способ динамического уравновешивания манипуляторной лесной машины, включающий шарнирное закрепление манипуляторного оборудования на стойках спереди полноповоротной платформы с контргрузом, отличающийся тем, что контргруз разделяют, по крайней мере, на две части и устанавливают шарнирно на полноповоротной платформе, а для поворота в плоскости полноповоротной платформы части контргруза кинематическим механизмом шарнирно соединяют со стрелой манипулятора.
2. Способ динамического уравновешивания манипуляторной лесной машины по п.1, отличающийся тем, что обе части контргруза шарнирно устанавливают на общей вертикальной неподвижной оси, расположенной сзади полноповоротной платформы посередине ее ширины на продольной оси, проходящей через центр вращения полноповоротной платформы с манипуляторным оборудованием.
3. Устройство для динамического уравновешивания манипуляторной лесной машины, содержащее полноповоротную платформу, на стойках которой впереди шарнирно закреплена стрела манипулятора, отличающееся тем, что внутри имеющей хвостовики стрелы манипулятора по их концам шарнирно закреплена основная тяга кинематического механизма, причем второй конец основной тяги шарнирно соединен с переходником, к которому на двух вертикальных шарнирах присоединены две вспомогательные тяги, вторые концы которых шарнирно закреплены на сторонах двух частей контргруза.
4. Устройство для динамического уравновешивания манипуляторной лесной машины по п.3, отличающееся тем, что по концам хвостовиков стрелы манипулятора с радиусом, обеспечивающим поворот обеих частей контргруза на 90°, шарнир выполнен в виде общей оси, размещаемой в отверстиях на концах хвостовиков, на которой по бокам основной тяги размещены две втулки.
5. Устройство для динамического уравновешивания манипуляторной лесной машины по п.3, отличающееся тем, что переходник выполнен прямоугольной формы с выемкой для размещения конца основной тяги на пальце с поворотом в вертикальной плоскости, а на противоположной стороне выполнены две угловые выемки для размещения концов двух вспомогательных тяг на пальцах для поворота.
6. Устройство для динамического уравновешивания манипуляторной лесной машины по п.3, отличающееся тем, что, при необходимости увеличения момента, противодействующему моменту от опрокидывающих сил, снизу к частям контргруза прикреплены дополнительные контргрузы.
| МАЗУРКИН П.М., Поисковое конструирование лесотехнического оборудования, Саранск, изд-во Саратовского университета, 1990, с | |||
| Упругое экипажное колесо | 1918 |
|
SU156A1 |
| МАШИНА МАНИПУЛЯТОРНАЯ | 2009 |
|
RU2420952C1 |
| Лесозаготовительная машина | 1990 |
|
SU1808261A1 |
| US 2005199316 A1, 15.09.2005 | |||

