Изобретение относится к конструкциям ловителя механического типа и предназначено для остановки и удержания грузонесущего устройства подъемника в случае обрыва или ослабления подъемного каната. Ловитель используется для обеспечения безопасности эксплуатации мачтовых подъемников как с боковым размещением грузонесущего устройства, так и для грузонесущих устройств, подвешенных на двух канатах.
Известен ловитель для поднимаемого груза по авторскому свидетельству №1207975, МКИ B66B 5/16, опубл. 30.01.1986 г., содержащий две направляющие с отверстиями, на которых с возможностью перемещения посредством роликов смонтирована площадка для груза, на основании которой расположена подпружиненная платформа. Два Г-образных двуплечих рычага шарнирно установлены на площадке у направляющих. Одно плечо рычагов посредством продольного паза шарнирно связано с пальцем, закрепленным на подпружиненной платформе. Вторые плечи рычагов, имеющие зуб, выполнены с возможностью взаимодействия с отверстиями направляющих для фиксации площадки.
Такое устройство ловителя срабатывает только при наличии оператора на платформе, поэтому оно имеет ограниченную применимость, к тому же такой ловитель сложен по конструкции из-за присутствия в нем рабочей площадки, включающей стол с роликами и тягу, подпружиненную относительно поднимаемого груза.
В качестве ближайшего аналога по техническому решению выбран ловитель грузового подъемника по патенту на полезную модель №83769, МКИ B66B 5/16, опубл. 20.06.2009 г. Грузовой подъемник включает подвижную относительно двух перфорированных направляющих грузовую каретку, в котором ловители выполнены в виде двух подпружиненных шарнирно закрепленных на каретке рычагов, внешнее плечо которых выполнено с возможностью взаимодействия с перфорированной направляющей при ослаблении или обрыве тягового каната, а внутренние плечи имеют продольные пазы, в которые входят пальцы горизонтальных плеч серьги, выполненной в виде перевернутой буквы T. Вертикальная часть серьги вверху имеет отверстие для связи с тяговым канатом, а внизу - пазовое отверстие, в которое входит палец грузовой каретки. Ловители поворачиваются под действием усилия пружин, которые установлены между внутренними плечами ловителей и грузовой кареткой.
Указанная конструкция ловителя сложна и нетехнологична. Так, T-образная форма серьги усложняет ее изготовление, а присоединение пружин к внутренней поверхности внешнего плеча рычага и внутренней поверхности каретки затрудняет их установку при сборке, а также контроль за их состоянием. Кроме того, такая конструкция ловителя с двумя рычагами, разнесенными по разным сторонам каретки и срабатывающих от одного привода (серьги), может вызывать перекосы, а также поломки и срыв каретки из-за не одновременности срабатывания рычагов ловителя.
Техническими результатами настоящего изобретения является упрощение конструкции ловителя, его сборки и обслуживание, а также повышение надежности срабатывания ловителя и повышение безопасности работы грузового подъемника, снабженного данным ловителем. Кроме того, решается задача расширения номенклатуры грузовых подъемников, в которых может применяться данная конструкция ловителя.
Указанные технические результаты достигаются тем, что ловитель, содержащий серьгу для соединения с подъемным канатом, подпружиненный упор, в виде двуплечего рычага, шарнирно установленный с возможностью ограниченного поворота и взаимодействия с перфорируемой направляющей, размещен в корпусе для установки его на грузонесущей платформе, в котором выполнена продольная направляющая полость, ориентированная по оси подъемного каната. В корпусе на оси размещен упор, внешнее плечо которого подпружинено относительно корпуса, а также посредством пальцев установлен толкатель, подпружиненный относительно корпуса с направлением усилия в противоположную сторону натяжения подъемного каната и с возможностью ограниченного перемещения вдоль направляющей полости. Серьга размещена на свободном, выступающем из корпуса конце толкателя, на втором, размещенном в корпусе, конце которого выполнен выступ, взаимодействующий с внутренним плечом подпружиненного упора.
Для целей упрощения технологии изготовления ловителя его корпус целесообразно выполнять в виде двух уголков, внешние поверхности одних сторон которых образуют продольную полость, а во вторых сторонах выполнены отверстия для крепления его на грузонесущей платформе. Для повышения жесткости всей конструкции ловителя, уголки снабжены ребрами жесткости.
Для обеспечения ограниченного перемещения толкателя, как более целесообразный вариант, в нем могут быть выполнены овальные отверстия, большие диаметры которых ориентированы по оси подъемного каната, а в корпусе закреплены пальцы, проходящие через овальные отверстия толкателя. Возможно и инверторное исполнение, а именно в корпусе выполняют овальные отверстия, а пальцы закрепляют в толкателе.
Пружины толкателя могут быть установлены следующим образом: одни концы пружин установлены в кронштейнах, закрепленных по обеим внешним сторонам корпуса, а вторые концы - на кронштейнах, закрепленных по обеим сторонам выступающей части толкателя.
Пружины упора, размещенные по обеим внешним сторонам корпуса, могут быть установлены следующим образом: одни концы пружин установлены на пальце, закрепленном на внешнем плече упора и проходящем через овальные отверстия, выполненные в корпусе, а вторые концы пружин установлены на кронштейнах, закрепленных на корпусе.
В качестве примера реализации изобретения для мачтового подъемника с боковым размещением грузонесущего устройства, не исчерпывающего другие варианты исполнения с существенными признаками, изложенными в независимом пункте формулы, представлены следующие чертежи.
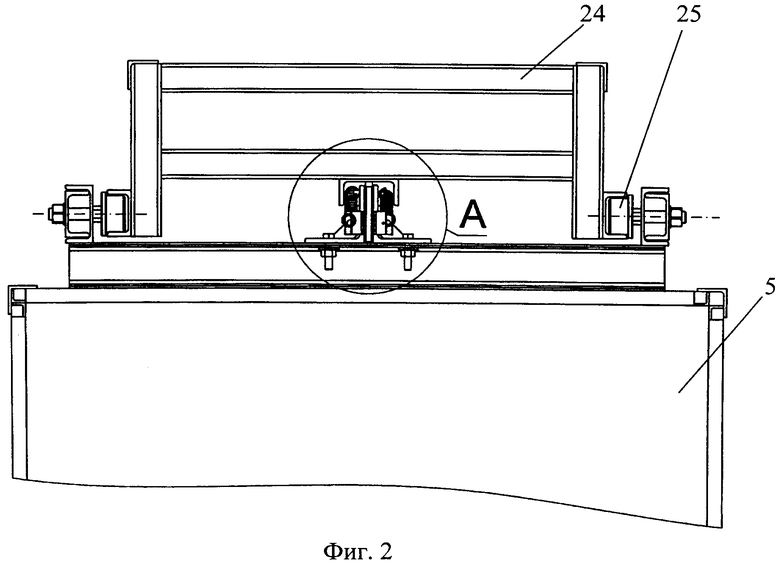
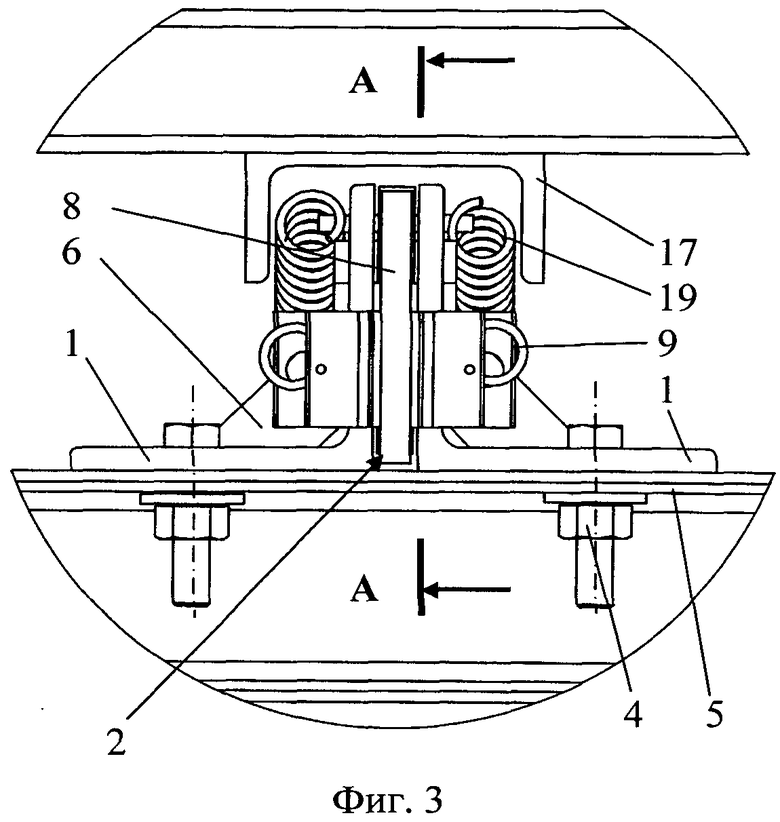
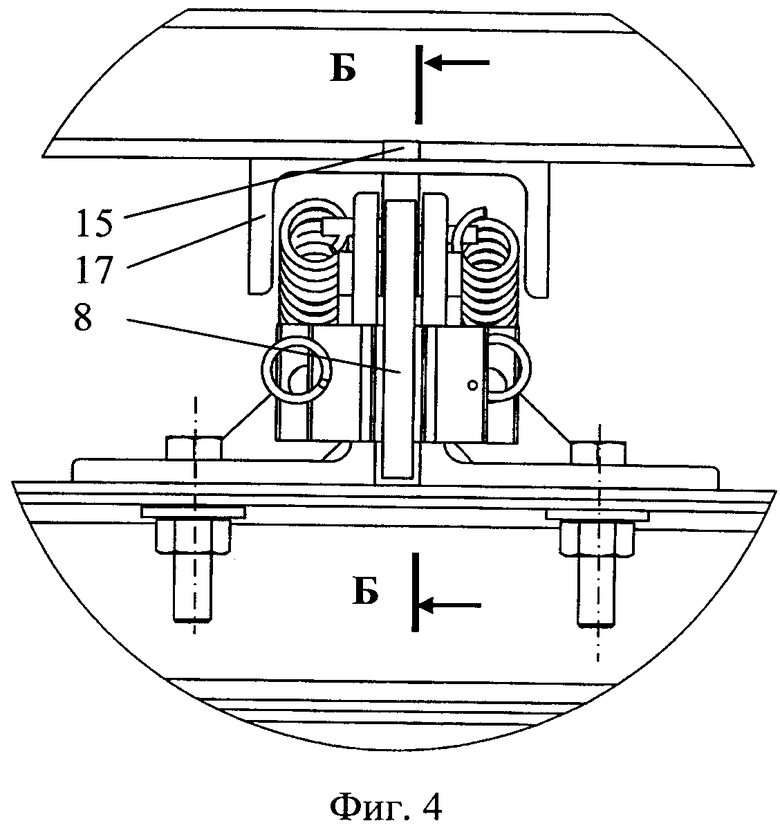
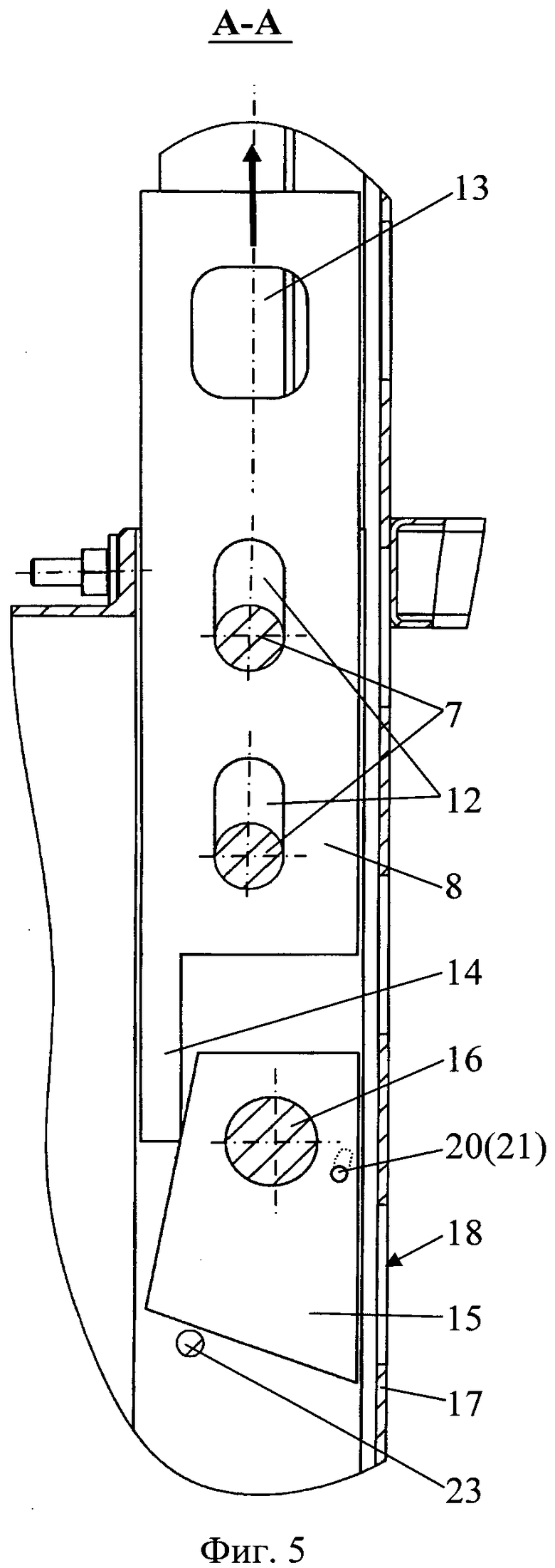
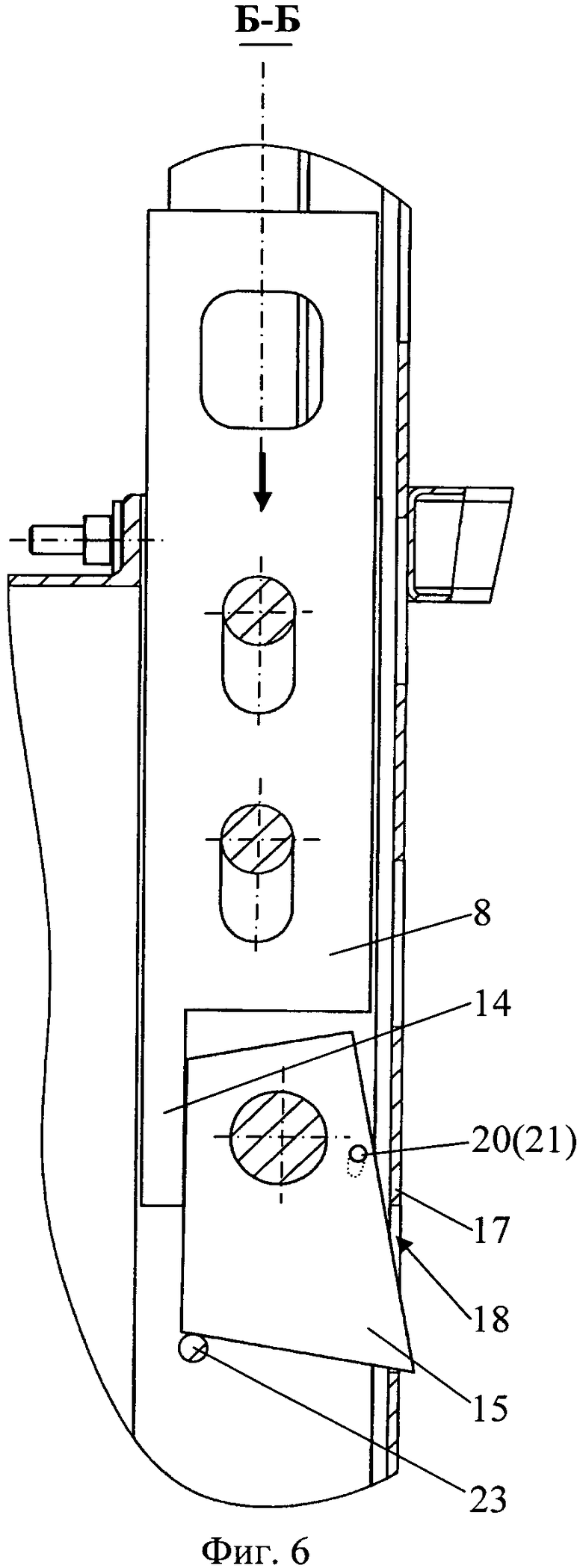
На фиг.1 - общий вид ловителя в аксонометрии; на фиг.2 - вид сверху ловителя, установленного на грузовой платформе; на фиг.3 - увеличенный узел A на фиг.2, ловитель во взведенном состоянии при натяжении подъемного каната; на фиг.4 - увеличенный узел A на фиг.2, ловитель сработал при обрыве или ослаблении подъемного каната; на фиг.5 - разрез А-А фиг.3, ловитель во взведенном состоянии; на фиг.6 - разрез Б-Б фиг.4, ловитель сработал при обрыве или ослаблении подъемного каната.
Ловитель содержит корпус, состоящий, в частном случае, из двух уголков 1, внешние поверхности одних сторон которых образуют продольную направляющая полость 2, ориентированную по оси О-О подъемного каната (не показано). Во вторых сторонах уголков 1 выполнены отверстия 3 для крепления ловителя посредством крепежных элементов 4 на грузонесущей платформе 5. Для повышения жесткости всей конструкции ловителя, уголки 1 снабжены ребрами жесткости 6.
В корпусе посредством пальцев 7 установлен толкатель 8, подпружиненный пружинами 9 относительно корпуса с направлением усилия в противоположную сторону натяжения подъемного каната. Одни концы пружин 9 толкателя 8 установлены в кронштейнах 10, закрепленных по обеим внешним сторонам корпуса, а вторые концы - на кронштейнах 11, закрепленных по обеим сторонам выступающей части толкателя 8.
Толкатель 8 установлен в корпусе с возможностью ограниченного перемещения вдоль направляющей полости 2. Для этого в толкателе 8 выполнены овальные отверстия 12, большие диаметры которых ориентированы по оси О-О подъемного каната. Через отверстия 12 толкателя 8 проходят пальцы 7. На свободном, выступающем из корпуса конце толкателя 8 размещена серьга 13. На втором, размещенном в корпусе конце толкателя 8, выполнен выступ 14.
В корпусе ловителя размещен также подпружиненный упор 15, выполненный в виде двуплечего рычага, шарнирно установленный посредством оси 16 с возможностью ограниченного поворота и взаимодействия с направляющей 17, в которой выполнены отверстия 18 под упор 15. Внешнее плечо упора 15 подпружинено относительно корпуса пружинами 19. Пружины 19 упора 15 размещены по обеим внешним сторонам корпуса. Одни концы пружин 19 установлены на пальце 20, закрепленном на внешнем плече упора 15 и проходящем через овальные отверстия 21, выполненные в корпусе. Вторые концы пружин 19 установлены на кронштейнах 22, закрепленных на корпусе. В корпусе закреплен также ограничитель 23 поворота упора 15.
При этом выступ 14 толкателя 8 выполнен с возможностью взаимодействия с внутренним плечом подпружиненного упора 15.
Устройство работает следующим образом.
Грузоподъемное устройство установлено на несущей конструкции в виде мачты 24 с боковым креплением и перемещается по направляющим с помощью роликов 25. На мачте установлена направляющая 17 с отверстиями 18. Ловитель закреплен на грузонесущей платформе 5 напротив направляющей 17.
В рабочем состоянии при натяжении подъемного каната, закрепленного на серьге 13, толкатель 8, перемещаясь по направляющей полости 2, занимает крайне верхнее положение, ограниченное пальцами 7. Пружины 9 толкателя 8 взведены. Выступ 14 толкателя 8 освобождает упор 15, который под действием пружин 19 полностью размещается в корпусе ловителя (Фиг.5). Упор 15 не мешает грузовой платформе свободно перемещаться вдоль перфорированной направляющей 17.
В случае ослабления или обрыва подъемного каната, толкатель 8 под действием пружин 9 занимает крайнее нижнее положение. При этом выступ 14 толкателя 8 надавливает на внутреннее плечо подпружиненного упора 15, поворачивая его тем самым вокруг оси 16. Угол поворота упора 15 ограничен ограничителем 23. Выступая из корпуса ловителя, упор 15 входит в одно из отверстий 18 направляющей 17, останавливая тем самым падение грузонесущей платформы 5 (Фиг.6).
Заявленная конструкция ловителя проста, что существенно облегчает его сборку и обслуживание. Высокая надежность срабатывания ловителя повышает безопасность работы грузового подъемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для предотвращения аварийного падения кабины пассажирского лифта | 2024 |
|
RU2837921C1 |
| Ловитель для грузоподъемных механизмов | 1986 |
|
SU1337333A1 |
| Устройство для испытания ловителей подъемника | 1988 |
|
SU1643394A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ЛОВИТЕЛЕЙ КАБИНЫ ЛИФТА | 2006 |
|
RU2398727C2 |
| ЭКСЦЕНТРИКОВЫЙ ЛОВИТЕЛЬ ДЛЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2329940C2 |
| УСТРОЙСТВО ДЛЯ РАБОТЫ НА ВЫСОТЕ | 1992 |
|
RU2018601C1 |
| ПОДЪЕМНИК ДЛЯ ПЕРЕМЕЩЕНИЯ ВНУТРИ ВЕРТИКАЛЬНО УСТАНОВЛЕННОГО ОБЪЕКТА | 1992 |
|
RU2026252C1 |
| Ловитель платформы подъемника | 1984 |
|
SU1174362A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Подъемник | 1989 |
|
SU1615122A2 |
Изобретение относится к конструкциям ловителя механического типа и предназначено для остановки и удержания грузонесущего устройства подъемника в случае обрыва или ослабления подъемного каната. Ловитель содержит корпус с продольной направляющей полостью (2), в которой установлен толкатель (8), подпружиненный пружинами (9) относительно корпуса с направлением усилия в противоположную сторону натяжения подъемного каната. На свободном, выступающем из корпуса конце толкателя (8) размещена серьга (3). На втором, размещенном в корпусе конце толкателя (8) выполнен выступ (14). В корпусе ловителя размещен также подпружиненный упор, выполненный в виде двуплечего рычага, шарнирно установленный посредством оси (16) с возможностью ограниченного поворота и взаимодействия с направляющей, в которой выполнены отверстия под упор. Выступ толкателя (8) выполнен с возможностью взаимодействия с внутренним плечом подпружиненного упора. Изобретение упрощает конструкцию ловителя, его сборку и обслуживание, а также повышает надежность срабатывания ловителя и безопасность работы грузового подъемника, снабженного данным ловителем. 5 з.п. ф-лы, 6 ил.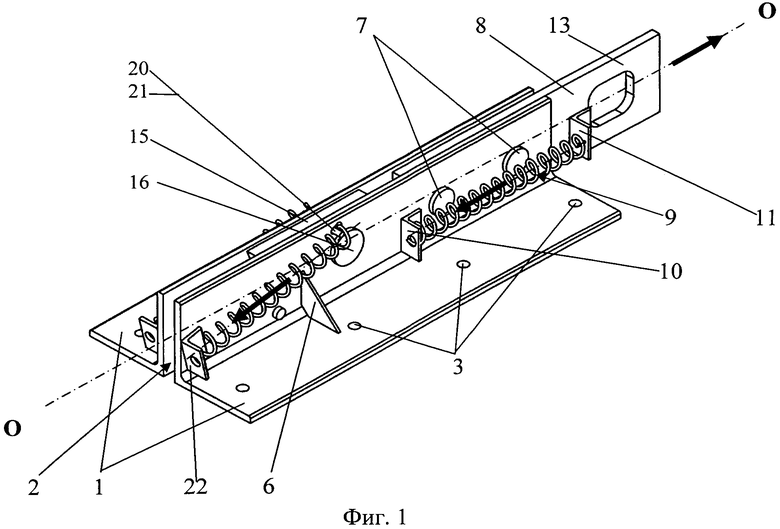
1. Ловитель для грузового подъемника, содержащий серьгу для соединения с подъемным канатом, подпружиненный упор, в виде двуплечего рычага, шарнирно установленный с возможностью ограниченного поворота и взаимодействия с перфорируемой направляющей, отличающийся тем, что он содержит корпус для установки его на грузонесущей платформе, в котором выполнена продольная направляющая полость, ориентированная по оси подъемного каната, в которой на оси размещен упор, внешнее плечо которого подпружинено относительно корпуса, а также посредством пальцев установлен толкатель, подпружиненный относительно корпуса с направлением усилия в противоположную сторону натяжения подъемного каната и с возможностью ограниченного перемещения вдоль направляющей полости, причем на свободном, выступающем из корпуса конце толкателя выполнена серьга, а на втором конце толкателя, размещенном в корпусе, выполнен выступ, взаимодействующий с внутренним плечом подпружиненного упора.
2. Ловитель по п.1, отличающийся тем, что его корпус выполнен в виде двух уголков, внешние поверхности одних сторон которых образуют продольную полость, а во вторых сторонах выполнены отверстия для крепления его на грузонесущей платформе.
3. Ловитель по п.2, отличающийся тем, что уголки снабжены ребрами жесткости.
4. Ловитель по п.1, отличающийся тем, что в толкателе выполнены овальные отверстия, большие диаметры которых ориентированы по оси подъемного каната, а в корпусе закреплены пальцы, проходящие через овальные отверстия.
5. Ловитель по п.1, отличающийся тем, что по обеим внешним сторонам корпуса закреплены кронштейны, на которых установлены одни концы пружин, вторые концы которых установлены на кронштейнах, закрепленных по обеим сторонам выступающей части толкателя.
6. Ловитель по п.1, отличающийся тем, что на внешнем плече упора закреплен палец, проходящий через овальные отверстия, выполненные в корпусе, на котором установлен один из концов пружин, размещенных по обеим внешним сторонам корпуса, вторые концы которых установлены на кронштейнах, закрепленных на корпусе.
| СПОСОБ ГЕРМЕТИЗАЦИИ ТЕМПЕРАТУРНОГО ШВА ПЕЧЕЙ ДЛЯ ТЕРМИЧЕСКОЙ ПЕРЕРАБОТКИ ТОПЛИВА | 1949 |
|
SU83769A1 |
| Ловитель для поднимаемого груза | 1983 |
|
SU1207975A1 |
| Вилочный захват автопогрузчика | 1950 |
|
SU88007A1 |
| Штуцер для подсоединения вакуумметров в системах пневматического вакуумного транспорта сыпучих материалов | 1959 |
|
SU125983A1 |
| 0 |
|
SU86180A1 | |
| Устройство для непосредственного измерения времени опережения автоматического синхронизатора | 1959 |
|
SU127729A1 |
| ПРОИЗВОДНЫЕ БЕНЗОТИАЗОЛЦИКЛОБУТИЛАМИНА В КАЧЕСТВЕ ЛИГАНДОВ ГИСТАМИНОВЫХ H-РЕЦЕПТОРОВ, ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ НА ИХ ОСНОВЕ, СПОСОБ СЕЛЕКТИВНОЙ МОДУЛЯЦИИ ЭФФЕКТОВ ГИСТАМИНОВЫХ H-РЕЦЕПТОРОВ И СПОСОБ ЛЕЧЕНИЯ СОСТОЯНИЯ ИЛИ НАРУШЕНИЯ, МОДУЛИРУЕМОГО ГИСТАМИНОВЫМИ H-РЕЦЕПТОРАМИ | 2006 |
|
RU2487130C2 |
| СПОСОБ ЭЛЕКТРОРАСКРОЯ МАТЕРИАЛА | 0 |
|
SU218805A1 |

