Известны вилочные захваты автопогрузчико для захвата мешкои, ;п:;л.цс;1нм;; D .:;:e горизопта;;;;;;о без пзддонсз. этих захватных устройств, выполненные в виде вращаемых пальцев, повреждают мешки.
В предлагаемом устройстве этот недостаток устранен тем, что вилки выполнены в виде пальцев, закрепленных в каретке автопогрузчика на горизонтально-подвижных вали.чах, охваченных направляющей рамкой; при сближении валиков пальцы охватывают мешок с бокюв и поддерживают его при транспортнрованпн.
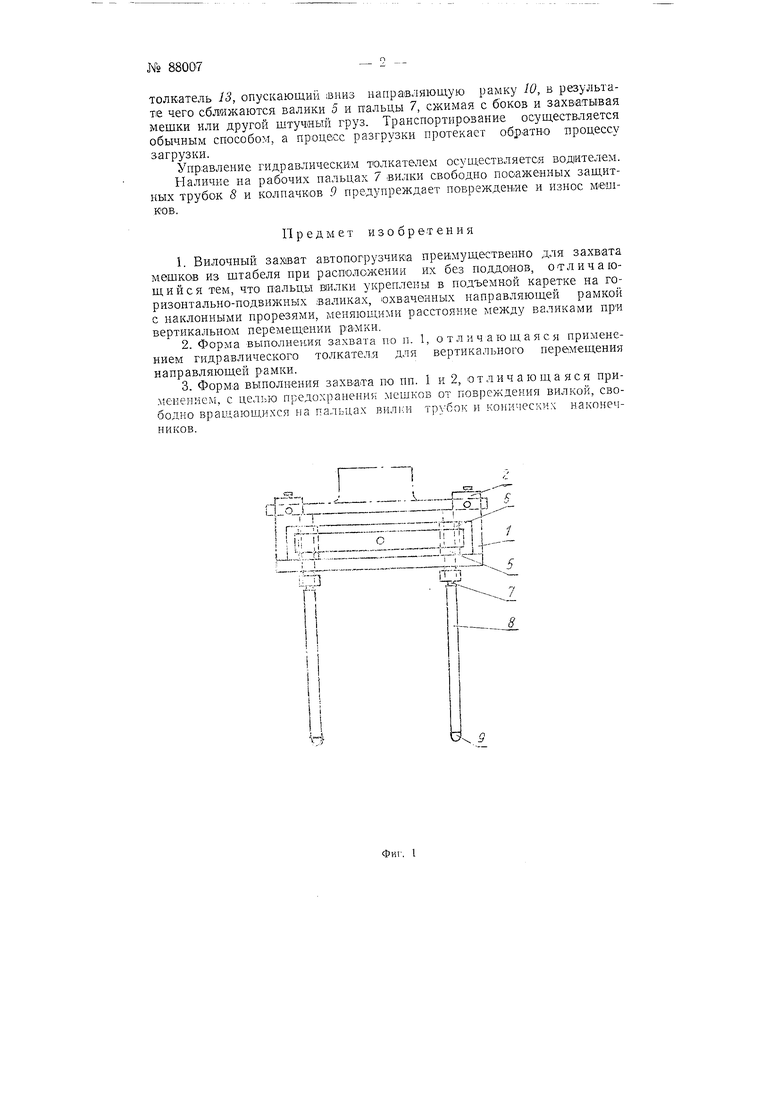
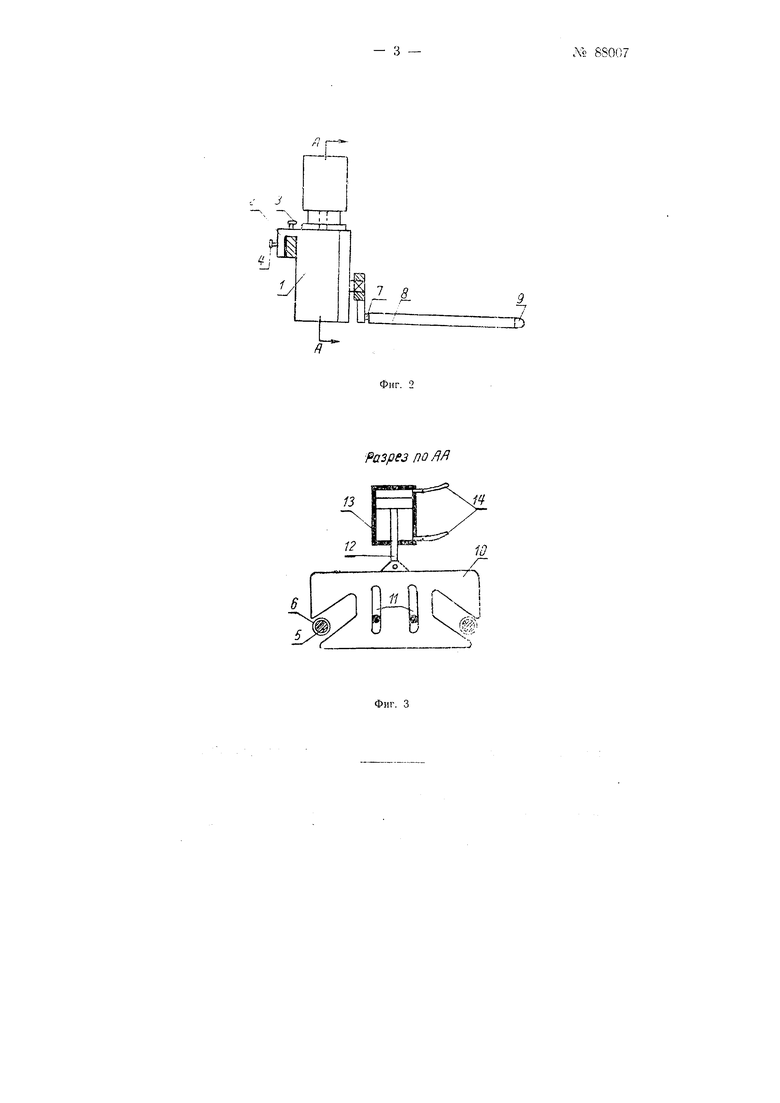
На фиг. I изображен описываемый . вид сверху; на фиг. 2- (ВИД сбоку; на фиг. 3-разрез по Л/1 на фиг. 2 (направляющая ралгка с прорезями).
Захват смонтирован в ко)пусе /, {от0ры ; к)епится к траверсе подъемной каретки автопог)узппка при ло.мсмцк изготовленных как одно целое с корпусом сксб 2, направляющих щтифтов 3 и пр.ижимнь х стопорных болтов 4. Лобовая стг:;ка корпуса выполпена отъемной.
Внутри корпуса в горизонтальных пазах смонтированы валики 5. несущие свободно сидящие на втулки 6. Наружные концы валиков 5 имеют квадратное сеченпе и на пих закреплены вилочные пальцы 7, со свободно надетыми па них защитны.л т)убками 5 и ютндевы.ми колпачками 9. Валики проходят через наклонные прорезн направляющей рамки 10, сиабженнок вертикальными щелями 11 для штифтов, направляющих рамку 10 при зертикалином перемещении ее. Вместо щхифтов возможно применение «ласточкина хвоста.
Направляющая рамка 10 шарнирно связана со щтоком 12 поршня реверсивного гидра зличесхого Толкателя /о, питаемого от гидравлической установки автопогрузчика по гибким трубопроводам 14.
Автопогрузчик подходит к штабелю мещков и, медленно двигаясь вперед, заводит пальцы 7 в стыки мсжд} ментами. Зате.м включается
№ 88007 2 -толкатель 13, опускающий 1вииз направляющую рамку 10, в результате чего сближаются валики 5 и пальцы 7, сжимая с боков и захватывая мешки или другой штучный груз. Транспортирование осуществляется обычным способом, а процесс разгрузки протекает обратно процессу загрузки.
Управление гидравлическим толкателем осуществляется водителем.
Наличие на рабочих пальцах 7 вилки свободно посаженных защитных трубок 8 и колпачков 9 предупреждает повреждение и износ мешков.
Предмет изобретения
1.Вилочный зах1ват автопогрузчика преимущественно для захвата мешков из штабеля при раснолОЖении их без поддонов, отличающийся тем, что пальцы нилки укреплены в подъемной каретке на горизонтально-подвижных валиках, охваченных направляющей рамкой с наклонными прорезями, меняюии-пш расстояние между валиками при вертикальной перемещении рамки.
2.Форма выполнения захвата по п. 1, отличающаяся применением гидравлического толкател.я для вертикального перелгещения направляющей рамки.
3.Форма выполнения захвата по пп. 1 и 2, от л ич а ю ща яся применением, с целью предохранений люшков от повреждения вилкой, свободно вращающихся на пальцах вил1;и трубок и конических наконечников.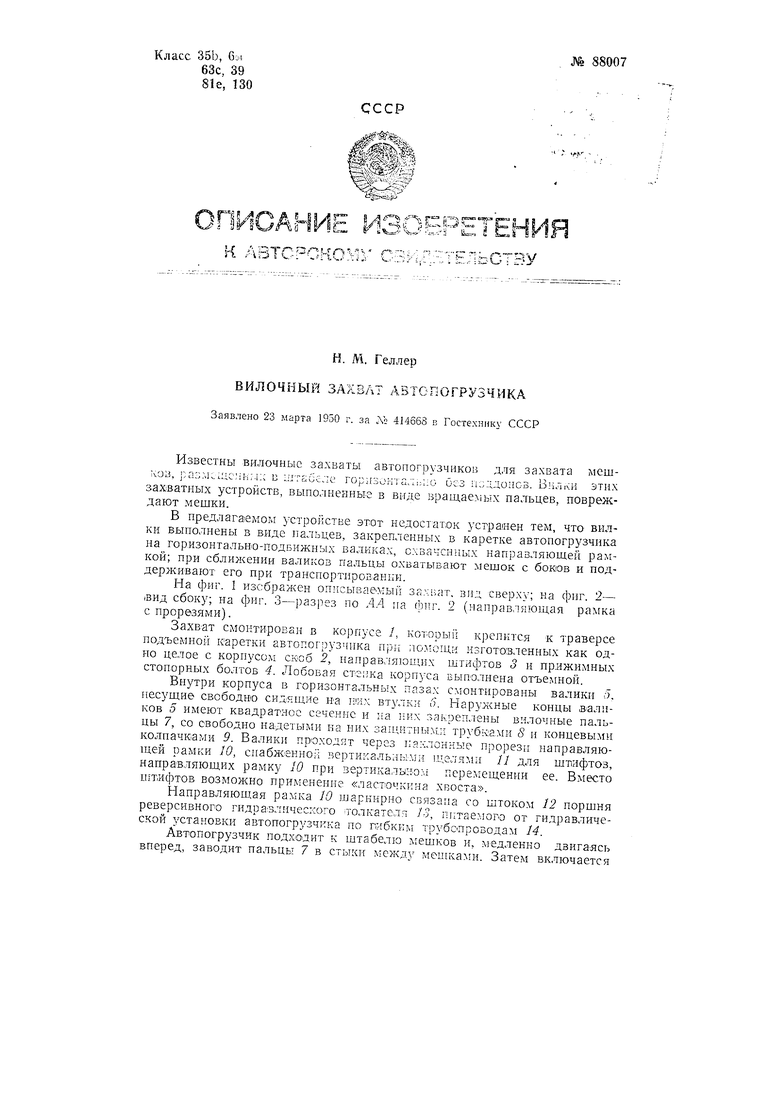
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ УПАКОВКИ кип БУМАГИ В ЩИТКИ | 1966 |
|
SU189737A1 |
| УСТРОЙСТВО для ОТКРЫВАНИЯ КРЫШЕК люков | 1964 |
|
SU166378A1 |
| Устройство для укладки в пакет поступающих по конвейеру штучных грузов | 1958 |
|
SU121072A1 |
| Захват для контейнеров | 1951 |
|
SU93165A1 |
| Устройство для выкалывания льда из ледяных бунтов | 1954 |
|
SU100659A1 |
| Тележка для транспортирования штучных грузов | 1958 |
|
SU122029A1 |
| Промышленный погрузчик | 1989 |
|
SU1684256A1 |
| УСТРОЙСТВО ДЛЯ ВЫГРУЗКИ ЗАТАРЕННЫХ МЕШКОВ ИЗ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 1972 |
|
SU335190A1 |
| Сновально-ткацкий станок для тканья бесконечных приводных ремней | 1935 |
|
SU50111A1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ СТОПКИ ИЗДЕЛИЙ, УПАКОВКИ ИЛИ ГРУЗА | 2000 |
|
RU2238237C2 |
О 3
