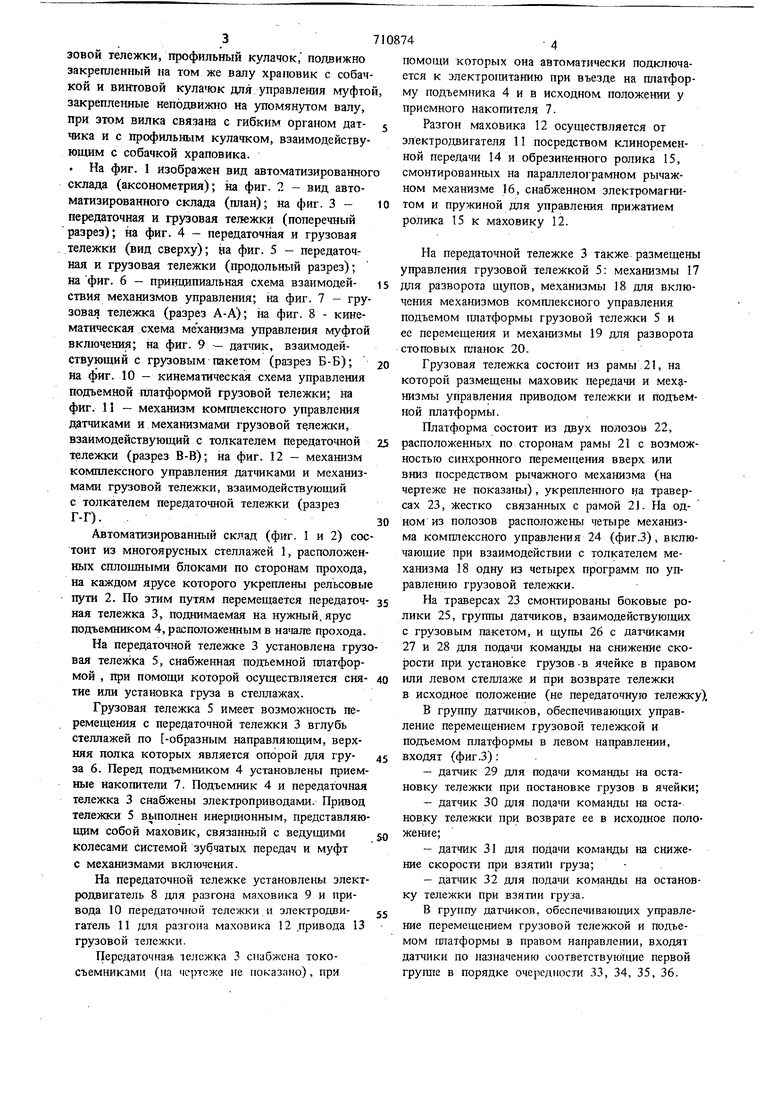
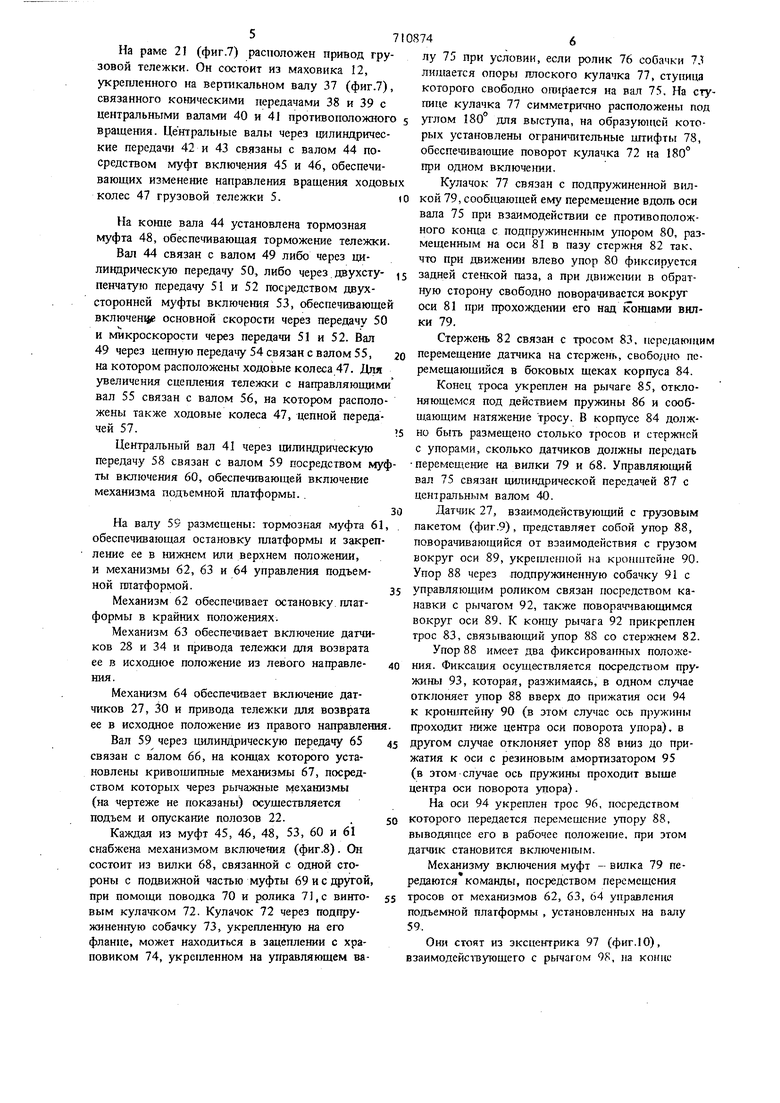
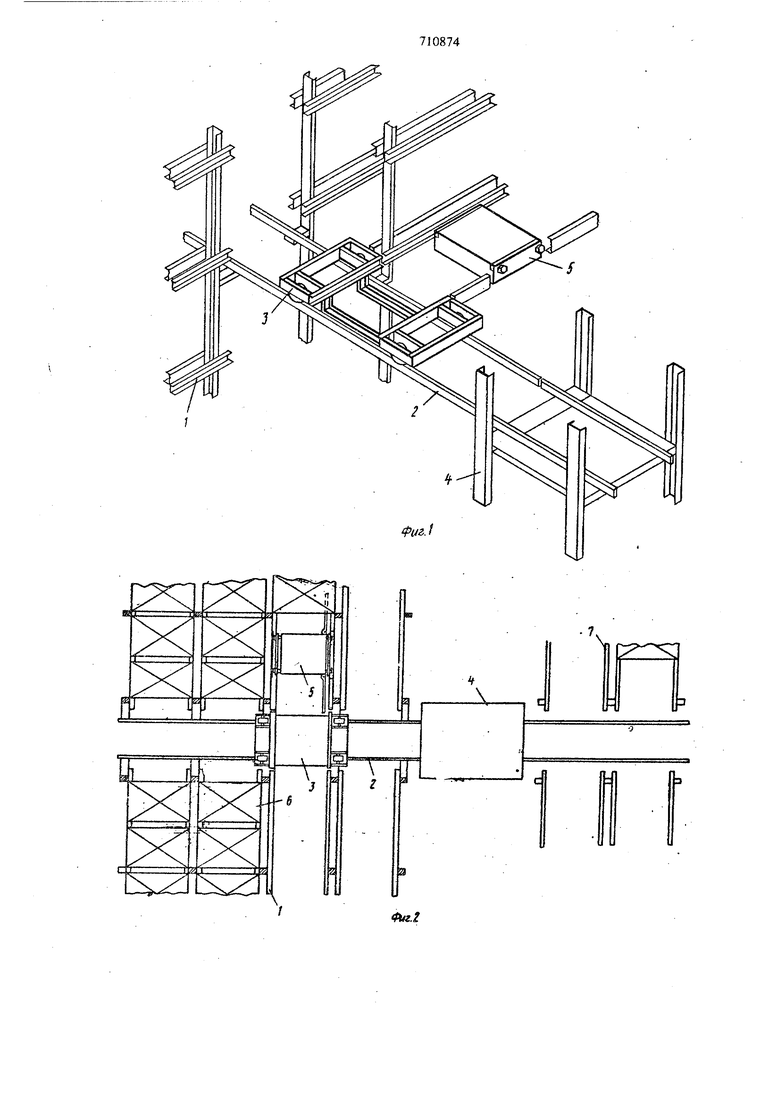
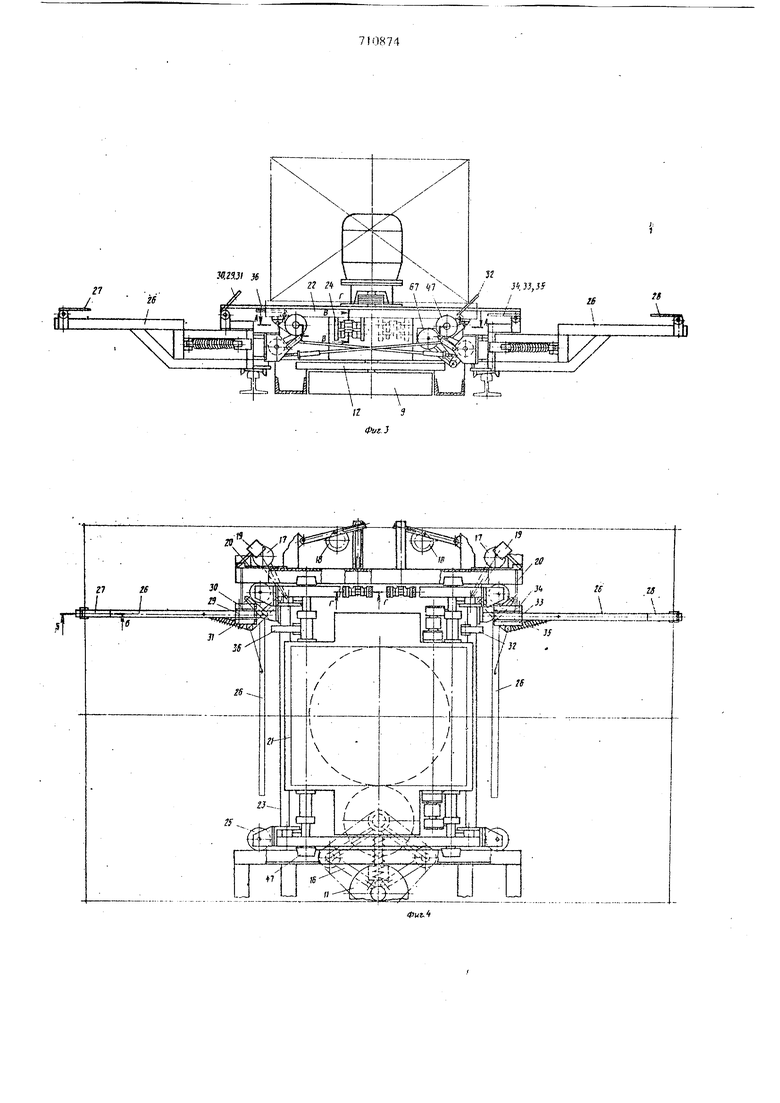
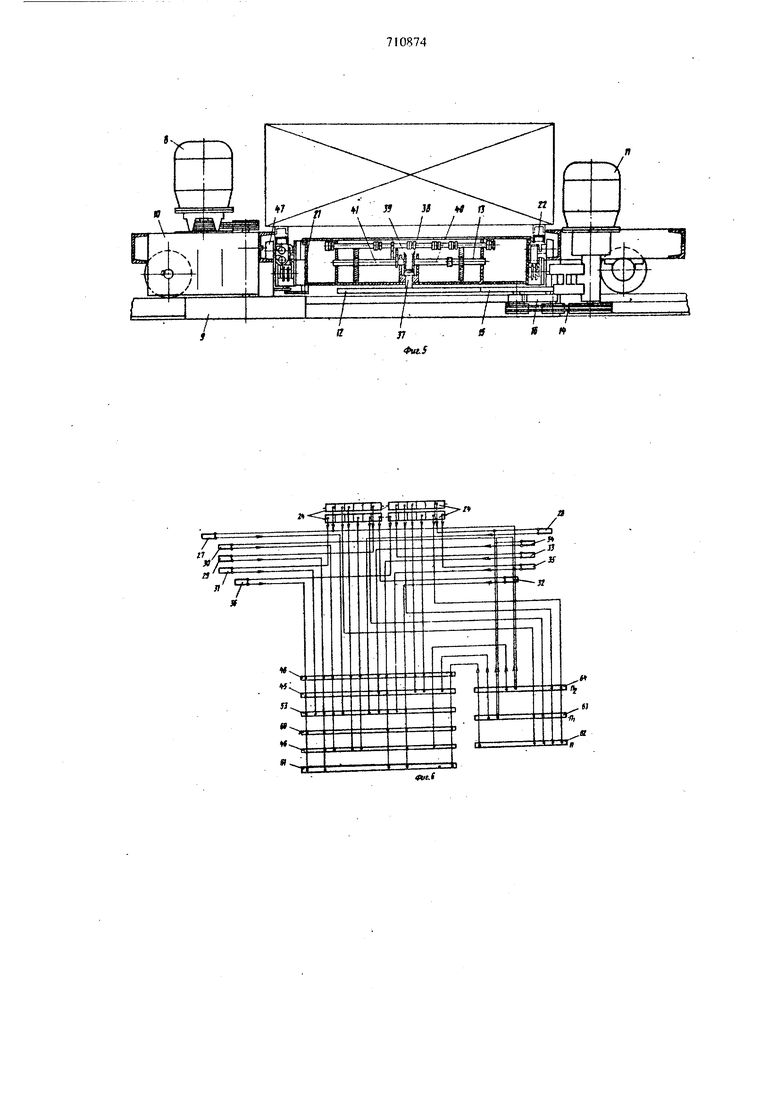
Изобретение относится к складскому хозяй ству, в частности, к автоматизированным складам. Известен автоматизированный склад, содержащий многоярусные ячейковые стеллажи, расположе1гаые с проходом, в котором подвижно установлена передаточная тележка с грузовой тележкой, смонтированной с возможностью перемещения по грузонесущим направляющим, закрепленным внутри каждой ячейки 1 . Однако этот склад требует дополнительных средств для передачи грузовой тележки в каждую ячейку стеллажа. Известен автоматизированный склад, содержащий многоярусные ячейковые стеллажи, расположенные с проходом, в котором подвижно установлена передаточная тележка с грузовой тележкой, смонтированной с возможностью перемещения по грузонесущим направляющим, закрепленным внутри каждой ячейки, подьемни для передаточной и грузовой тележек и систем управления, включающую датчики 2. Однако зтот склад ненадежен в эксплуатаци если он размещен в пожароопасных помещениях : поскольку НЕ грузовой тележке установлен электропривод, получающий питание от кабеля. Целью настоящего изобретения является повыщение надежности работы склада в пожароопасных помещениях. Это достигается тем, что привод грузовой тележки выполнен инерционным, содержащим маховик, взаимодействующий с приводом передаточной тележки и связанный через зубчатые передачи и муфты с ведущими колесами, при этом каждая муфта снабжена механизмом включения, связанным посредством гибкого органа с соответствующим датчиком , который выполнен в виде поворотного в вертикальной плоскости упора, закрепленного на грузовой тележке и снабженного подпружиненной собачкой, смонтированной на связашюм с упором пальце и взаимодействующей с рьиагом, прикрепленным к грузовой тележке, причем один конец упомянутого гибкого органа закреплен на упоре, а другой связан с механизмом включетшя туфты. Механизм включения муфт может содержать вилку, установленную га приподиом .чу гру3зоной тележки, профильный кулачок, подвижно закрепленный на том же валу храповик с собачкой и винтовой кулзюк для управления муфто закрепленные неподвижно на упомянутом валу, при этом вилка связана с гибким органом датчика и с профильным кулачком, взаимодействующим с собачкой храповика. На фиг. 1 изображен вид автоматизированног склада (аксонометрия); на фиг. 2 - вид автоматизированного склада (план); на фиг. 3 передаточная и грузовая тележки (поперечный разрез); на фиг. 4 - передаточная и грузовая тележки (вид сверху); va фиг. 5 - передаточная и грузовая тележки (продольный разрез); на фиг. 6 - принципиальная схема взаимодействия механизмов управлет1я; на фиг, 7 - грузовая тележка (разрез А-А); ш фиг. 8 - кинематическая схема механизма управле1шя муфтой включения; на фиг. 9 - датшк, взаимодействующий с грузовым пакетом (разрез Б-Б); на фиг. 10 - кинематическая схема управления подъемной платформой грузовой тележки; на фиг. 11 - механизм комплексного управления датчиками и механизмами грузовой тележки, взаимодействующий с толкателем передаточной тележки (разрез В-В); на фиг. 12 - механизм комплексного управления датчиками и механизмами грузовой тележки, взаимодействующий с толкателем передаточной тележки (разрез Г-Г). Автоматизированный склад (фиг. I и 2) сос тоит из многоярусных стеллажей 1, расположенных сплощными блоками по сторонам прохода, на каждом ярусе которого укреплены рельсовые пути 2. По зтим путям перемещается передаточная тележка 3, поднимаемая на нужный, ярус подъемником 4, расположенным в начале прохода. На передаточной тележке 3 установлена груз вая тележка 5, снабженная подъемной платформой , при помощи которой осзтцествляется снятие или установка груза в стеллажах. Грузовая тележка 5 имеет возможность перемещения с передаточной тележки 3 вглубь стеллажей по -образным направляющим, верхняя полка которых является опорой для груза 6. Перед подъемником 4 установлены приемные накопители 7. Подъемник 4 и передаточ1тая тележка 3 снабжены электроприводами. Привод тележки 5 вь1полнен инерционным, представляю щим собой маховик, связанный с ведущими колесами системой зубчатых передач и муфт с механизмами включения. На передаточной тележке установлены элект родвигатель 8 для разгона маховика 9 и привода 10 передаточной тележки и электродвигатель 11 для разгона маховика 12 привода 13 грузовой тележки. Передаточнаа тележка 3 снабжена токосъемниками (на чертеже не показано), при 4 помощи которых она автоматически подключается к электрогштанию при въезде на платформу подъемника 4 и в исходном положении у приемного накопителя 7. Разгон маховика 12 осуществляется от электродвигателя 11 посредством клиноременной передачи 14 и обрезиненного ролика 15, смонтированных на параллелограмном рычажном механизме 16, снабженном злектромагнитом и пружиной для управления прижатием ролика 15 к маховику 12. На передаточной тележке 3 также размещены управле}шя грузовой тележкой 5: механизмы 17 для разворота щупов, механизмы 18 для включения механизмов комплексного управления подъемом платформы грузовой тележки 5 и ее перемещения и механизмы 19 для разворота стоповых планок 20. Грузовая тележка состоит из рамы 21, на которой размещены маховик передачи и механизмы управления приводом тележки и подъемной платформы. Платформа состоит из двух полозов 22, расположенных по сторонам рамы 21 с возможностью синхронного перемеп1ения вверх или вниз посредством рычажного механизма (на чертеже не показаны), укрепленного на траверсах 23, Жестко связанных с рамой 21. На одном из полозов расположены четыре механизма комплексного управления 24 (фиг.З), включающие при взаимодействии с толкателем механизма 18 одну из четырех программ по управлению грузовой тележки. На траверсах 23 смонтированы боковые ролики 25, группы датчиков, взаимодействующих с грузовым пакетом, и щупы 26 с датчиками 27 и 28 для подачи команды на снижение скорости при установке грузов-в ячейке в правом или левом стеллаже и при возврате тележки в исходное положение (не передаточную тележку), В группу датчиков, обеспечивающих управление перемещением грузовой тележкой и подъемом платформы в левом направлении, входят (фиг.З): - датчик 29 для пода1Ш команды на остановку тележки при постановке грузов в ячейки; -датчик 30 для подат команды на остановку тележки при возврате ее в исходное положение;-датчик 31 для подачи команды на снижение скорости при взятия груза; -- датчик 32 для подачи команды на остановку тележки при взятии груза. В группу датчиков, обсспечиваюищх управление перемещением грузовой тележкой и подъемом гтатформы в правом направлении, входят датчики по назначению соответствующие первой группе в порядке очередности 33, 34, 35, 36.
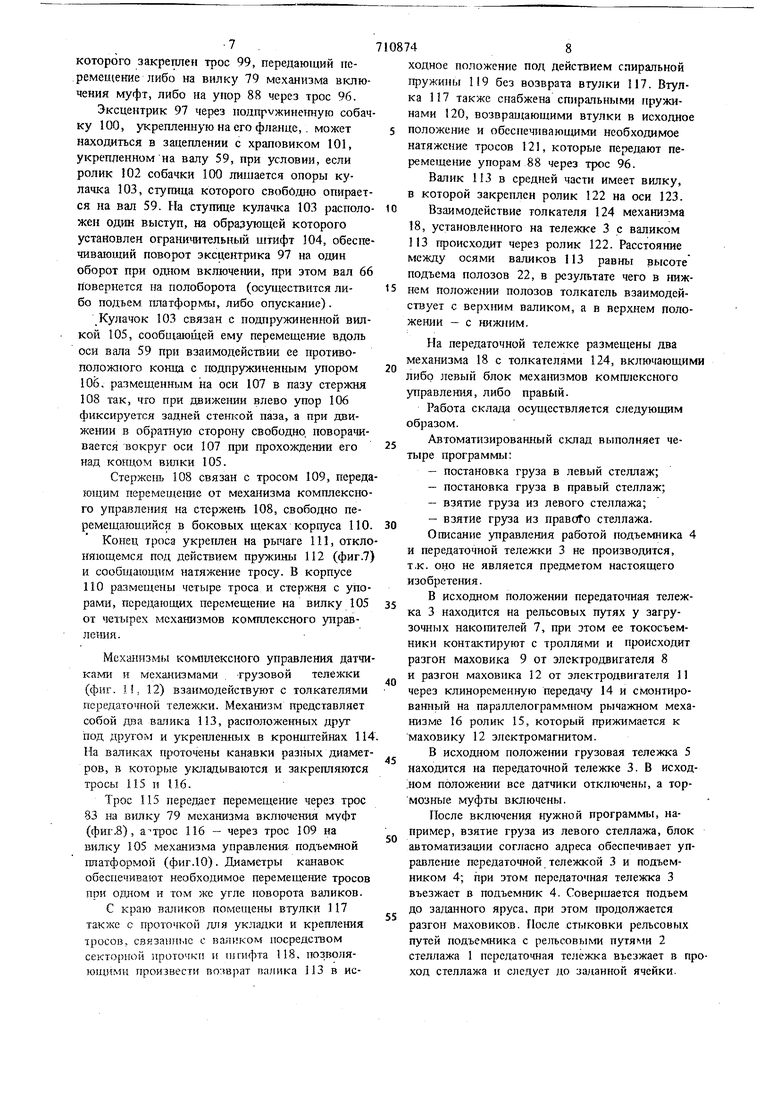
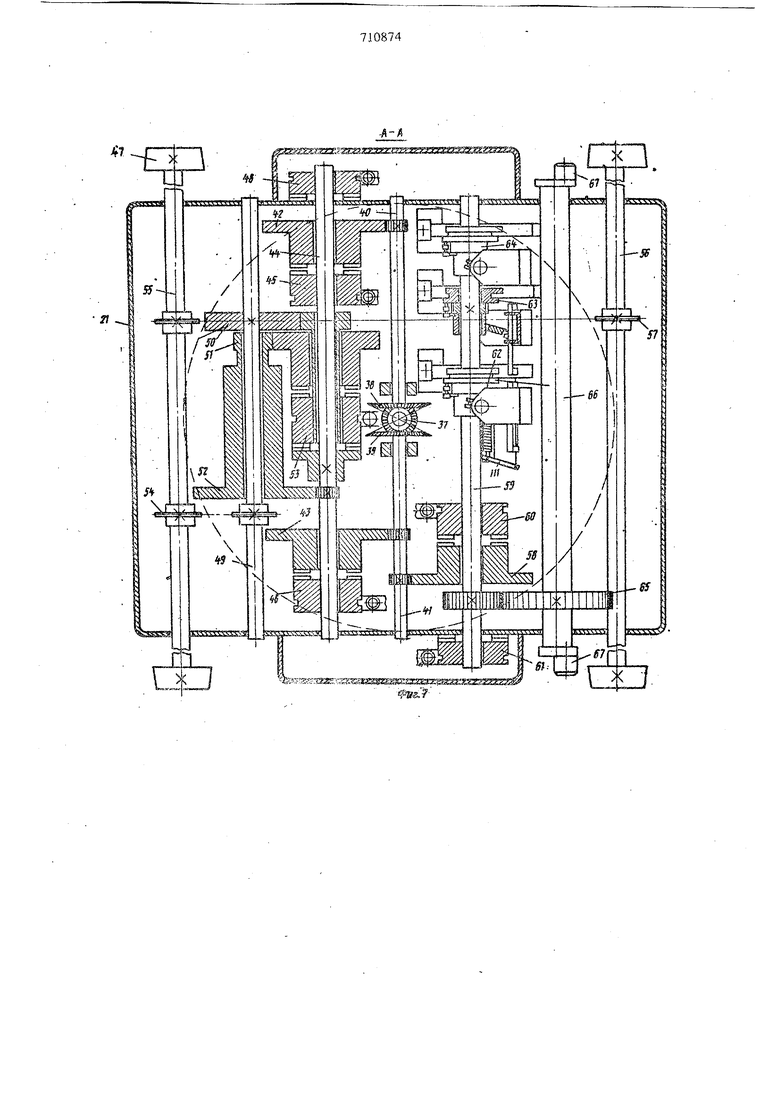
На раме 21 (фиг.7) расположен привод грузовой тележки. Он состоит из маховика 12, укрепленного на вертикальном валу 37 (фиг.7), связанного коническими передачами 38 и 39 с центральными валами 40 и 41 противоположного 5 вращения. Центральные валы через вдлиндрические передачи 42 и 43 связаны с валом 44 посредством муфт включения 45 и 46, обеспечивающих изменение направления вращения ходовых колес 47 грузовой тележки 5.(О
На конне вала 44 установлена тормозная муфта 48, обеспечивающая торможение тележки.
Вал 44 связан с валом 49 либо через цилиндрическую передач 50, либо через. двухсту- ,5 пенчатую передачу 51 и 52 посредством двухсторонней муфты включеш1я 53, обеспечивающей включен14е основной скорости через передачу 50 и микроскорости через передачи 51 и 52. Вал 49 через цепную передачу 54 связан с валом 55, 20 на котором расположены ходовые колеса 47. Для увеличения сцепления тележки с направляющими вал 55 связан с валом 56, на котором расположены также ходовые колеса 47, цеПной передачей 57.15
Центральный вал 41 через цилиндрическую передачу 58 связан с валом 59 посредством муфты включения 60, обеспечивающей включение механизма подъемной платформы. .
На валу 59 размещены: тормозная муфта 61, обеспечивающая остановку платформы и закрепление ее в нижнем или верхнем положении, и механизмы 62, 63 и 64 управления подъемной платформой.35
Механизм 62 обеспечивает остановку платформы в крайних положениях.
Механизм 63 обеспечивает включегше датчиков 28 и 34 и привода тележки для возврата ее в исходное положение из левого направле- 40 кия.
Механизм 64 обеспечивает включение датчиков 27, 30 и привода тележки для возврата ее в исходное положение из правого направления.
Вал 59 через цилиндрическую передачу 65 45 связан с валом 66, на концах которого установлены кривошипные механизмы 67, посредством которых через рычажные механизмы (на чертеже не показаны) осуществляется подъем и опускание полозов 22..50
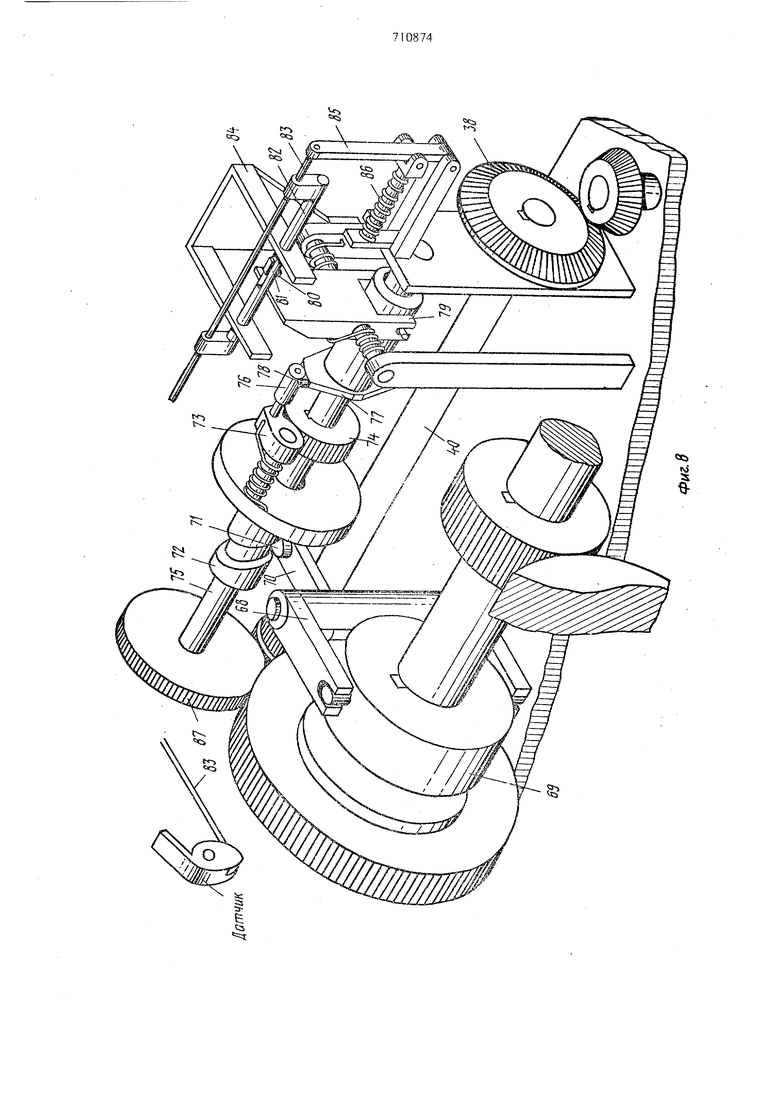
Каждая из муфт 45, 46, 48, 53, 60 и 61 снабжена механизмом включения (фиг.8). Он состоит из вилки 68, связанной с одной стороны с подвижной частью муфты 69 и с другой, при помощи поводка 70 и ролика 71, с винто- 55 вым кулачком 72. Кулачок 72 через подпружиненную собачку 73, укрепленную на его фланце, может находиться в зацеплении с храповиком 74, укрепленном на управляющем валу 75 при условии, если ролик 76 соОачки 73 лишается опоры плоского кулачка 77, ступица которого свободно опирается на вал 75. На стпице кулачка 77 симметрично расположены под углом 180 для вьгстут1а, на образующей которых установлены ограничительные щтифты 78, обеспечивающие поворот кулачка 72 на 180° при одном включе1ши.
Кулачок 77 связан с подпружиненной вилкой 79, сообщающей ему перемещение вдоль оси вала 75 при взаимодействии ее противоположного конца с подпружиненным упором 80, размещенным на оси 81 в пазу стержня 82 так. что при движении влево упор 80 фиксируется задней стенкой паза, а при движении в обратную сторону свободно поворачивается вокруг оси 81 при прохождении его над концами вилки 79.
Стержень 82 связан с тросом 83, передающи перемеще1ше датчика на стержень, свободно перемещающийся в боковых щеках корпуса 84. Конец троса укреплен на рычаге 85, отклоняющемся под действием пружины 86 и сообщающим натяжение тросу. В корпусе 84 должно быть размещено столько тросов и стержней с упорами, сколько датчиков должны передать перемещение на вилки 79 и 68. Управляющий вал 75 связан циливдрической передачей 87 с цен7раггьным валом 40.
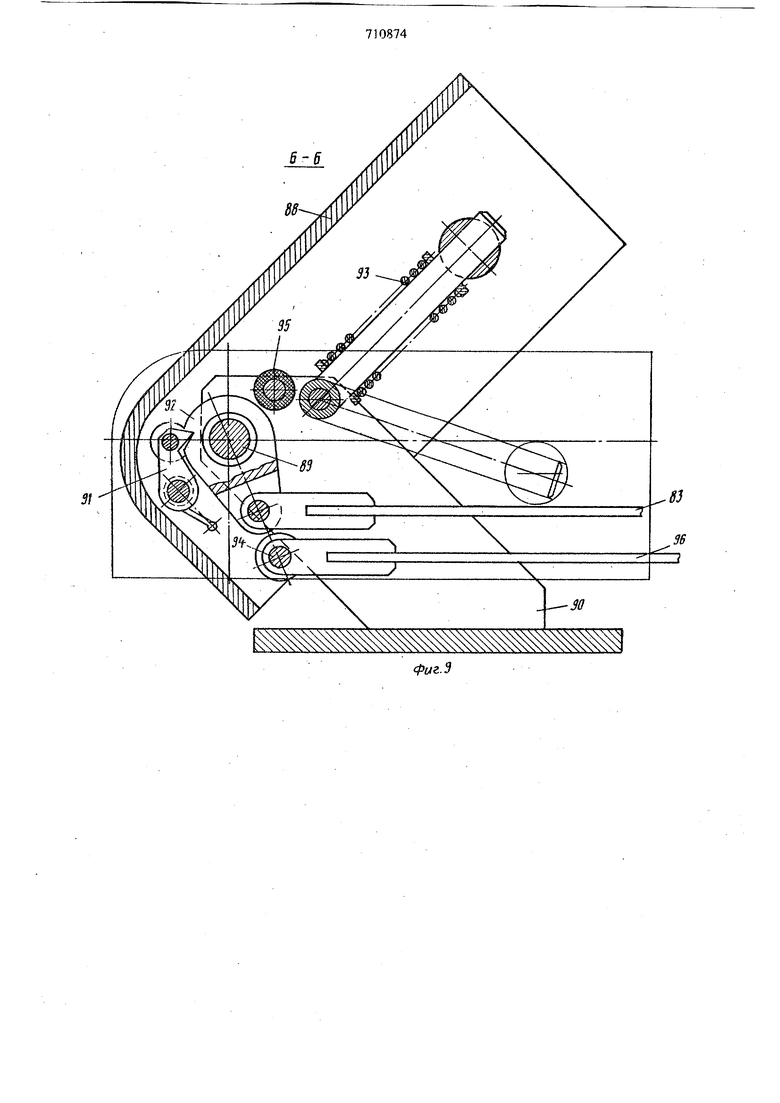
Датчик 27, взаимодействующий с грузовым пакетом (фиг.9), представляет собой упор 88, поворачивающийся от взаимодействия с грузом вокруг оси 89, укрепленной на кронштейне 90. Упор 88 через подпружиненную собачку 91 с управляющим роликом связан посредством канавки с рычагом 92, также поворачивающимся вокруг оси 89. К концу рычага 92 прикреплен трос 83, связывающий упор 88 со стержнем 82.
Упор 88 имеет два фиксированных положения. Фиксация ос)тцествляется посредством пружины 93, которая, разжимаясь, в одном случае отклоняет упор 88 вверх до прижатия оси 94 к кронилейну 90 (в этом случае ось пружины проходит ниже центра оси поворота упора), в другом случае отклоняет упор 88 вниз до прижатия к оси с резиновым амортизатором 95 (в зтом случае ось пружины проходит выше центра оси поворота упора).
На оси 94 укреплен трос 96, посредством которого передается перемещение упору 88, выводящее его в рабочее положеюте, при этом датчик становится включен1 ым.
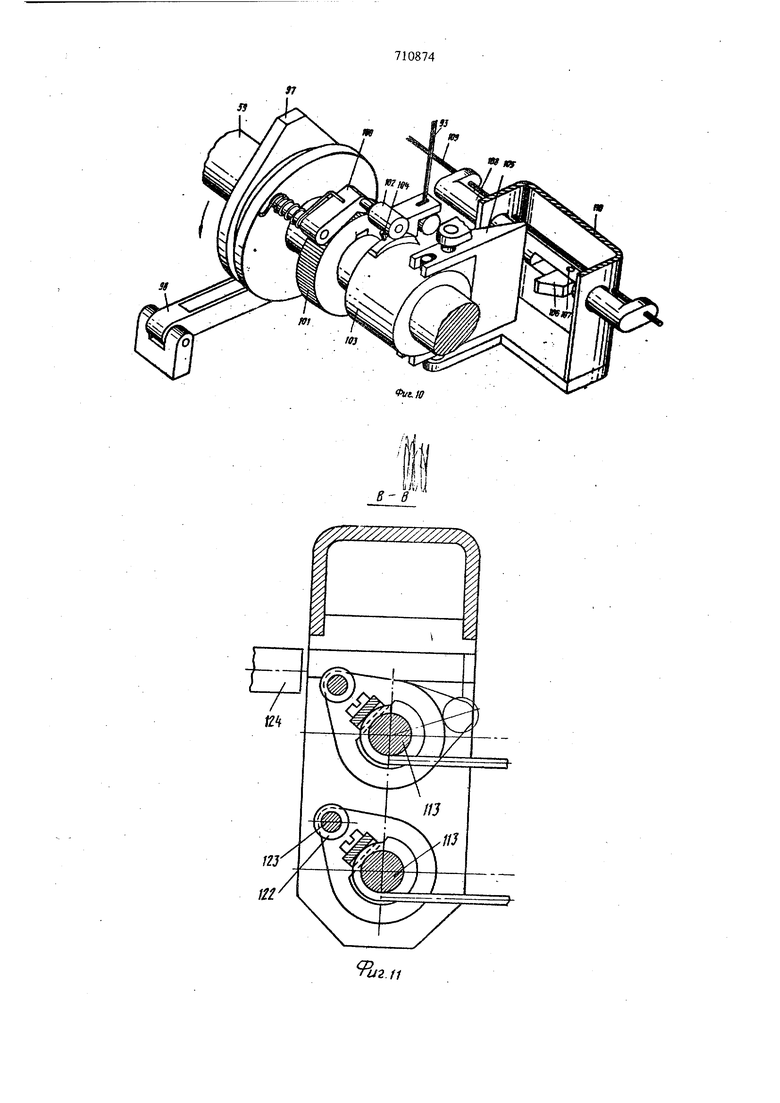
Механизму включения муфт - вилка 79 передаются команды, посредством перемещения тросов от меха{шзмов 62, 63, 64 управления подъемной платформы , установленных на валу 59.
Они стоят из эксцентрика 97 (фиг.10), взаимодействующего с рычагом 9S, на копне
которого закреплен трос 99, передающий перемещение либо на вилку 79 механизма включения муфт, либо на упор 88 через трос 96.
Эксцентрик 97 через подпружиненную собачку 100, укрепленную на его фланце, . может находиться в зацеплении с храповиком 101, укрепленномна валу 59, при условии, если ролик 102 собачки 100 лишается опоры кулачка 103, ступица которого своббтщо опирается на вал 59. На ступице кулачка 10.3 расположен один выступ, на образующей которого установлен ограничительный штифт 104, обеспечивающий поворот эксцентрика 97 на один оборот при одном включe ши, при этом вал 66 повернется на полоборота (осу1цествится либо подъем платформы, либо опускание).
Кулачок 103 связан с подпружиненной вилкой 105, сообщающей ему перемещение вдоль оси виа 59 при взаимодействии ее противополо)июго конца с подпружиненным упором 106. размещенным на оси 107 в пазу стержня 108 так, что при движешш влево упор 106 фиксируется задней стенкой паза, а при движе1ши в обратную сторону свободно, поворачивается вокруг оси 107 при прохождении его над концом вилки 105.
Стержень 108 связан с тросом 109, передающим перемеще1ше от механизма комплексного управлетшя на стержень 108, свободно перемещающийся в боковых щеках корпуса 110. Конец троса укреплен на рычаге 111, отклоняющемся под действием пружины 112 (фиг .7) и сообщаюихим натяжение тросу. В корпусе 110 размещены четыре троса и стержня с упоpaMii, передающих перемещение на вилку 105 от четырех механизмов комплексного управлешш.
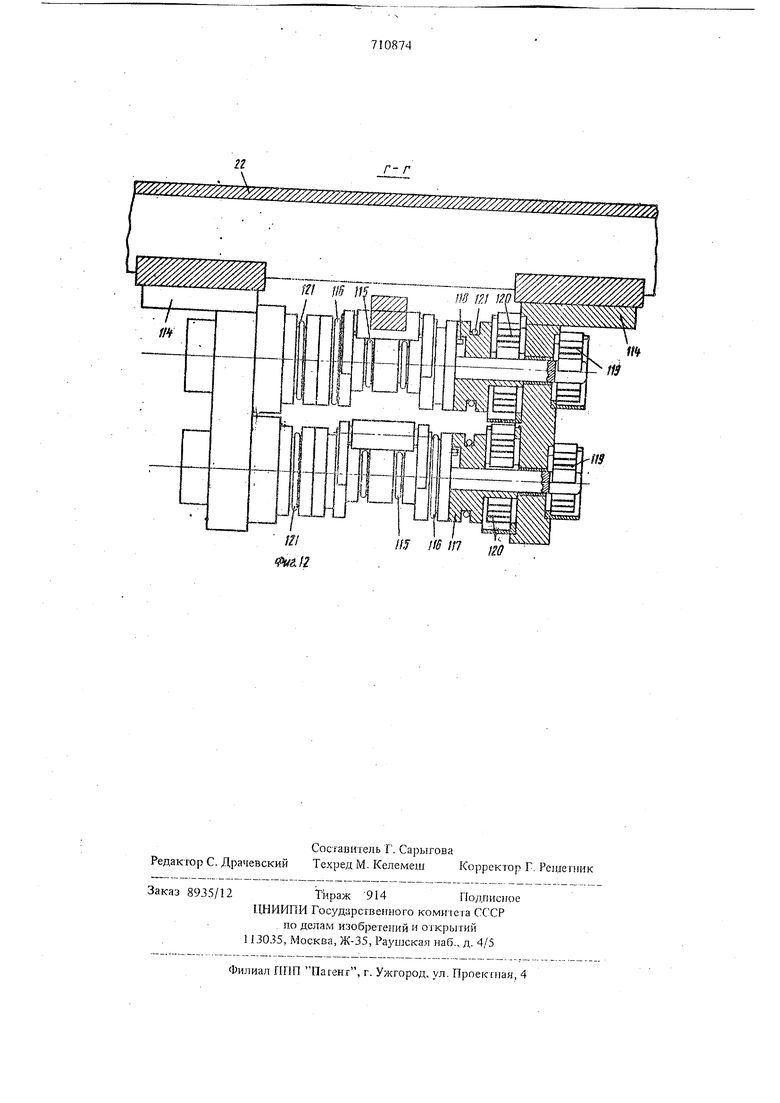
Мехшизмы ком1шексного управления датчиками и механизмами . -грузовой тележки (фиг. II, 12) взаимодействуют с толкателями передаточной тележки. Механизм представляет собой два валика 113, расположенных друг под другом и укрешгешсых в кронштейнах 114 На валиках проточены канавки разных диаметров, н которые укладываются и закрепляются тросы 115 п 116.
Трос 115 передает перемещение через трос 83 на )зилку 79 механизма включения муфт (фиг.8), а-трос 116 - через трос 109 на вилку 105 механизма управления подъемной платформой (фиг.10). Диаметры канавок обеспечивают необходимое перемещение тросов при одлом и том же угле поворота валиков.
С краю валиков помещены втулки 117 также с проточкой укладки и крепления тросов, связанные с валиком посредством секторной проточки н члифта 118, позволяющими произвести возврат палика 113 в исходное положение под действием спиральной пружины без возврата втулки 117. Втупка 117 также снабжена спирачьными пружинами 120, возвращающими втулки в исходное положение и обеспечивающими необходимое натяжение тросов 121, которые передают перемещение упорам 88 через трос 96.
Валик 113 в средней части имеет вилку, в которой закреплен ролик 122 на оси 123.
Взаимодействие толкателя 124 механизма 18, установленного на тележке 3 с валиком 113 гфоисходит через ролик 122. Расстояние между осями валиков 113 равны высоте подъема полозов 22, в резу.гп.тате чего в нижнем положении полозов толкатель взаимодействует с верхним валиком, а в верхнем положении - с нижним.
На передаточной тележке размещены два механизма 18 с толкателями 124, включающим либо левьпТ блок механизмов комплексного управления, либо правый.
Работа склада осуп1ествляется следующим образом.
Автоматизированный склад выполняет четыре программы:
-постановка груза в левый стеллаж;
-постановка груза в правый стеллаж;
-взятие груза из левого стеллажа;
-взятие груза из правого стеллажа. Описание управления работой подъемника 4
и передаточной тележки 3 не производится, т.к. оно не является предметом настоящего изобретения.
В исходном положении передаточная тележка 3 находится на рельсовых путях у загрузочных накопителей 7, при этом ее токосъемники контактируют с троллями и происходит разгон маховика 9 от электродвигателя 8 и разгон маховика 12 от электродвигателя 11 через клиноременную передачу 14 и смонтированный на параллелограммном рычажном механизме 16 ролик 15, который прижимается к маховику 12 электромагнитом.
В исходном положении грузовая тележка 5 находится на передаточной тележке 3. В исход 1ом положе1ши все датчики отключены, а тормозньге муфты включены.
После включения нужной программы, например, взятие груза из левого стеллажа, блок автоматизации согласно адреса обеспечивает управление передаточной тележкой 3 и подъемником 4; при этом передаточная тележка 3 въезжает в подъемник 4. Соверщается подъем до заданного яруса, при этом продолжается разгон маховиков. После сть1ковки релъсовых путей подъемника с рельсовыми путями 2 стеллажа 1 передаточная тележка въезжает в прход стеллажа н следует до заданной ячейки. После стыковки направляющих передаточной тележки с направляющими стеллажа 1 происходит включение механизмов 17, разворачивающих щупы 26, при этом датчик, установленный на щупе не работает, механизма 18 левой стороны, толкатель которого взаимодействует с верхним валиком 113 механизма комплексн го управления, и механизма 19 правой стороны разворашвающего стоповую планку 20. Механизм комплексного управления упоавляет перемещением тележки и подъемом ее гаатформы, включает датчики 31 и 32, мехашзмы управления подъемной платформы 62 и 63 и муфты 46 и 48 грузовой тележки 5, одновременно отключающие тормоз тележки и включающие привод ходовых колес 47. Через передачу 50, включаемую муфтой 53, в исходном положении грузовой тележки 5 обеспечивается ее движение с основной скоростью. Включение датчиков. 31 и 32 производится путем поворота валика ИЗ от взаимодействия с толкателем 124 механизма 18, при этом через щтифт 118 поворачиваются втулки 117,, в проточках которых уложены и укреплены тросы 121, передающие перемещение тросам 96, укрепленным на осях 94, которые, в свою очередь, выводят упоры 88 в рабочее, положение. Включение механизмов 62 и 63 управления подъемной платформы производится передачей перемещения троса 116 через трос 109 на вилку 105 механизма, в результате чего кулаюк 103 перемещается вдоль оси вала 59, при этом ролик 102 лищается опоры и собачка 100 входит в зацеплегше с храповиком 101, подготавливая этим самым последующий цикл. Включение муфт 46 и 48 производится пере дачей перемещения троса 115 через трос 83 на вилку 79 механизма включения (фиг.8), в результате чего кулачок 77 перемещается вдоль оси валка 75. При этом ролик Тб лищается опоры и собачка 73 входит в зацепление с вращающимся храповиком 74, происходит поворот винтового кулачка 72, перемещающего поводок 70 с роликом 71 и вилку 68, связанную с под виж11ой час1ъю муфты 69. Перемещ.ение грузовой тележки 5 происходи до момента взаимодействия датчика 31 с пакетом груза 6, в результате чего происходит поворот упора 88 вокруг оси 94.. Под действием пружины 93 упор 88 занимает фиксированное положение, упираясь осью 94 в кронштейн 90. Одновременно упор 88 поворачивает рычаг 92 вокруг оси 89. Поворот рычш-а 92 сообщает перемещение тросу 83, который через упор 80 стержня 82 механизмов включения муфт 74..10 (фиг.8) поворачивает вилку 79, сообщающую перемещение кулачку 77 вдоль оси валка 75. При этом ролик 76 собачки 73 теряет опору и собаша 73 входит в зацепление с вращающимся храповуп ом 74, происходит поворот винтового кулачка 72 до тех пор пока ролик 76, наехав на противоположный выступ кулачка 77, не выведет из зацегшсния собачку 73 И не остановится у ограничительного щтифта 78. В конце поворота рычага 92 управляющий ролик собачки 91 наезжает на стоику .кронщтейна 90 и выводит собачку 91 из зацепления с рычагом 92, при этом под дейспигем натяжения троса 83 рычаг 92 возвращается в исходное положение. Стержень 82 перемещается с тросом 83 в обратную сторону, при этом упор 80, поворачиваясь вокруг оси 81, проходит над концом ВШ1КИ 79 и также исходное положе1ше. Перемещение кулачка 77 совершается до тех пор, пока упор ВО находится в зацепле ши с вилкой 79. При дальнейшем перемещении упора 80 происходит расцепление его с вилкой 79, в результате чего она под действием ifiy KHны возвращается в исходное положеггае, перемещая кулачок 77 обратно в зон) действия 76. От поворота виитозого кулачка 72 происходит перемещение поводка 70 с роликом 7 и вилки 68, связанной с подвижной частью муфты 69, при этом 1трои:юйдет размыкание дисков муфты 53, отключающих Г1ерсдачу 50, и сцепление дисков той же муфть, включающих двухступешштую передачу 51 и 52, снижающую скорость передвижения грузовой тележки до доводочной. Затем троисход1ЕТ взаимодействие датчика 32 с тем же пакетом груза 6, в результате чего происходя : те :ice операдш и в той лее последовательности, что и при язаимодснстБИИ датчика31. От датчика 32 прог.зоЯчет сцепление дисков тормозной 48, разг.ык;1ние дисков муфты 53, отключающих двухступенчатую передач} 51 и 52, и сцеачение дисков той же муфты, включающих передачу 50, сцепление дисков муфты йО, включающей механизм подъема платформы, через передачи 58 и 65 и размыкание дисков тормозной муфты 61, освобождающей привод подъема платформы. В результате включения механизма начинается вращение вала 59 с храповиками 101, передающими вращение через co6atu y 100 m ксцентрик 97. Поворот эксцентрика 97 просходит до тех пор пока ролик 102, наехав а выступ кулачка 103, не выведет из зацепения собачку 100 и не остановится у ограниительного штифта104. Произойдет один обо117рот, в конце которого под действием эксцентрика 97 рычаг 98 сообщит перемещение троПеремещеш1е троса 99 механизма 62 передается стержню 82, который через упор 80 механизма включения муфт, повернет вилку 79, в результате чего произойдет размыкание дис,ков тормозной муфты 48, размыкание дисков муфты 60 и сцепление дисков тормозной муфты 61. При этом подъемная платформа остановится в верхнем положерши, сняв пакет груза с полок стеллажа 1. Перемещение тросов 99 механизма 63 передается через стержень 82 на упор 80 механизма включения вилки 79, в результате чего произойдет сцепление дисков муфты 45 и передается тросам 96, укрепленным на осях 94 (фиг.9), которые в свою очередь выведзт упоры 88 дат«шков 34 и .28 в рабочее положение. При этом грузовая тележка 5 начнет движение в обратную сторону с основной скоростью с включенными датчиками, необходимыми для ее остановки в исходном положении. При взаимодействии датчика 28 со стоповой планкой 20 происходит размьпсание дисков муф ты 53, отключающей передачу 50 и сцепление дисков той же муфты, включающей двухступенчатую передачу 51 и 52, при этом происходит снижение скорости грузовой тележки до дово дочкой. При взаимодействии датчика 34 со стоповой планкой 20 присходит сцепление дисков муфты 48, размыкание дисков муфты 45 и размыкани дисков муфты 53, отключающей двухступенчатую5 передачу 51 и 52 и сцепление дисков той же муфты, включающей передачу 50. После остановки грузовой тележки 5 в исходном положетт включается мехага1зм 19, разворачивающий стоповую планку 20 и механизмы 17, поворачивающие щупы в исходное положение. После этого включается привод 10 передаточной тележки 3, возвращающий ее в исходное положение на подъемнике, где производится автоматическое подключение к электропитанию и разгон маховиков 9 и 12. При установке груза в ячейку стеллажа щу также разворачивается механизмом 17и датчик 27 или, 28 щупа включается. При подходе к установленному ранее пакету датчик 27 или 28 взаимодействует с этим пакетом, тем самы снижая скорость перемеще1шя грузовой тележки 5. Затем с пакетом 6 вступает во взаимодействие один из датчиков 30-31 или 34-35, 12 после чего тележка 5 останавливается и включается привод подъема через муфту 60 тележки 5. Пакет груза снимается со стеллажа и тележка 5 возвращается в исходное положение на передаточной тележке 3. Формула изобретения 1. Автоматизированный склад, содержащий многоярусные ячейковые стеллажи, расположенные с проходом, в котором подвижно установлена передаточная тележка с грузовой тележкой, смонтированной с возможностью перемещения по грузонесущим направляющим, закрепленным внутри каждой ячейки, подъемник для передаточной и грузовой тележек, и систему управления, включающую датчики, отличающийся тем, что, с целью повышения надежности работы склада в пожароопасных помещениях, привод грузовой телехжи выполнен инерционным, содержащим маховик, взаимодействующий с приводом передаточной тележки и связанный через зубчатые передачи и муфты с ведущими колесами, при этом каждая муфта снабжена механизмом включения, связанным посредством гибкого органа с соответствующим датчиком, который выполнен в виде поворотного в вертикальной плоскости упора, закрепленного на грузовой тележке и снабженного подпружиненной собачкой, смонтированной на связанном с упором пальце и взаимодействующей с рычагом, прикрепленным к грузовой тележке, причем один конец упомянутого гибкого органа закреплен на упоре, а другой связан с механизмом включения муфты. 2. Автоматизированный склад по п.1, о тличающийся тем, что механизм включения муфт содержит вилку, установленную на приводном валу грузовой тележки, профильный кулачок, подвижно закрепленный на том же ваду храповик с собачкой и винтовой кулачок для управления муфтой, закрепленные неподвижно на упомянутом валу, при этом вилка связана с гибким органом датчика и с тфофильным кулачком, взаимодействующим с собачкой храповика . Источники информации. принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 516581, кл. В 65 С 1/00, 1972. 2. Патент Франции № 2137081, кл. В 65 G 38/00, 1972.
7
V
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации передаточной тележки стеллажного крана-штабелера относительно межстеллажного прохода | 1989 |
|
SU1705197A1 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ВРЕМЕННОГО ХРАНЕНИЯ РАЗЛИЧНЫХ ПРЕДМЕТОВ | 1966 |
|
SU215637A1 |
| Устройство для управления приводными механизмами перегрузочной тележки склада | 1986 |
|
SU1400976A1 |
| Склад штучных грузов | 1975 |
|
SU818968A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| Кран-штабелер для загрузки иРАзгРузКи КОНТЕйНЕРОВ | 1978 |
|
SU819016A1 |
| ТРАНСПОРТНАЯ СИСТЕМА СКЛАДА ВЫСОКОПЛОТНОГО ЯРУСНОГО ХРАНЕНИЯ ГРУЗА НА ПОДДОНАХ | 2006 |
|
RU2323149C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
ш
т
Б- S
U2.11
т iii т
4,
//,f Не Ш 20
