Изобретение относится к области судостроения, более конкретно к подводным аппаратам, предназначенным для спасания людей с аварийных подводных объектов, находящихся под водой, в том числе и подо льдом.
Известен спасательный подводный аппарат (СПА), включающий камеру присоса со стыковочным фланцем. Для обеспечения стыковки указанного фланца с комингс-площадкой аварийного подводного объекта, плоскость которой наклонена к горизонту, используется наклон аппарата с помощью дифферентной (кренодифферентной) системы.
У всех известных СПА этот угол достигает величины 40...45 град. Однако по современным требованиям необходимо обеспечивать стыковку при угле наклона комингс-площадки аварийного подводного объекта к горизонту до 60 градусов (Голдовский Б.И. Современное состояние и прогноз развития спасательных глубоководных аппаратов // Морские интеллектуальные технологии, 2011, №4 (14), с.3-6).
Наклон спасательного подводного аппарата на такой угол с помощью дифферентной (кренодифферентной) системы приводит к увеличению водоизмещения аппарата на 3...4%, что соответственно удорожает аппарат и стоимость судна-носителя СПА. Кроме того, чаще всего увеличение водоизмещения аппарата невозможно из-за ограничений по транспортировке и его подъемному весу.
На спасательных подводных аппаратах, используемых с надводных судов-носителей, стыковка с аварийной подводной лодкой при углах наклона комингс-площадки к горизонту более 40...45 градусов обеспечивается применением поворотной камеры присоса или заменяемой частью камеры присоса с наклоненным стыковочным фланцем (Голдовский Б.И. Современное состояние и прогноз развития спасательных глубоководных аппаратов // Морские интеллектуальные технологии, 2011, №4 (14), с.3-6).
Однако на спасательных подводных аппаратах, используемых с подводных носителей, применение таких камер присоса невозможно из-за конструктивных особенностей подводной лодки-носителя СПА.
Целью изобретения является повышение надежности стыковки спасательного подводного аппарата с аварийным подводным объектом, в том числе и подо льдом, за счет устранения указанных недостатков при сохранении опоры аппарата о подводный объект в процессе закрепления захвата.
Поставленная цель достигается за счет того, что манипулятор для закрепления захвата устанавливается в камере присоса, образуя вместе с лебедкой подтягивания устройство закрепления и подтягивания. При этом выдвижение захвата за нижнюю плоскость стыковочного фланца камеры присоса должно быть не менее величины, определяемой требуемым углом наклона аппарата за счет подтягивания по выражению:

где 
RФ - радиус внешней нижней кромки стыковочного фланца камеры присоса (м);
αП=(αКП - αФ) - требуемый угол наклона аппарата при подтягивании;
αКП - наибольший заданный угол наклона плоскости комингс-площадки к горизонту;
αФ - наибольший угол наклона плоскости стыковочного фланца к горизонту, обеспечиваемый за счет иных технических средств аппарата (в частности, за счет дифферентной (кренодифферентной) системы).
Для ограничения габаритов устройства закрепления и подтягивания, например, включающего лебедку подтягивания и манипулятор, число степеней свободы манипулятора может быть ограничено величиной четыре. С этой же целью наибольшая величина выдвижения захвата за нижнюю плоскость стыковочного фланца камеры присоса может быть ограничена значением, определяемым параметрами устройства закрепления и подтягивания, и ограничениями, налагаемыми элементами СПА и его люка, по выражению:

где Δ1ПН - наибольшая требуемая величина выдвижения захвата устройства за нижнюю плоскость стыковочного фланца (м);
RФ - радиус внешней нижней кромки стыковочного фланца камеры присоса (м);
Т - допустимая наибольшая величина тяги устройства (кН);
Т=min (ТУМАХ; ТДОП);
ТУМАХ - максимальная тяга устройства (кН);
ТДОП - тяга, допустимая из условий прочности элементов спасательного люка, за которые закрепляется захват устройства (кН);
D - водоизмещение спасательного подводного аппарата (кН);
h - начальная метацентрическая высота аппарата, отнесенная к величине D (м).
Устройство закрепления и подтягивания, размещенное в камере присоса аппарата, выполняющее функции закрепления и подтягивания захвата, может быть выполнено в виде трехстепенного силового манипулятора, состоящего из трех тяг изменяемой длины, две из которых - силовые - расположены вдоль оси камеры присоса и верхними концами шарнирно закреплены на конструкциях корпуса аппарата или камеры присоса таким образом, чтобы шарниры были разнесены от оси камеры присоса, а линия, проходящая через оси двух шарниров, была параллельна основной плоскости аппарата, нижними концами шарнирно соединены в одной точке и соединены с подвижным захватом, а третья тяга - управляющая - расположена максимально перпендикулярно к плоскости, образованной силовыми тягами, и одним концом закреплена на конструкциях корпуса аппарата или камеры присоса, а другим концом шарнирно закреплена на одной из силовых тяг.
При наличии на аппарате системы гидравлики тяги изменяемой длины могут быть выполнены в виде гидроцилиндров. При этом для уменьшения габаритов устройства в нерабочем положении при обеспечении требуемого выдвижения захвата за плоскость стыковочного фланца силовые тяги могут быть выполнены телескопическими многократного действия.
При отсутствии на аппарате системы гидравлики тяги изменяемой длины могут быть выполнены в виде пары «винт-гайка» с электроприводом. При этом для уменьшения габаритов устройства в нерабочем положении при обеспечении требуемого выдвижения захвата за плоскость стыковочного фланца силовые тяги могут быть выполнены многоступенчатого действия.
Для уменьшения контактного давления в точке касания стыковочного фланца плоскости комингс-площадки при подтягивании внешняя нижняя кромка стыковочного фланца камеры присоса может быть выполнена закругленной.
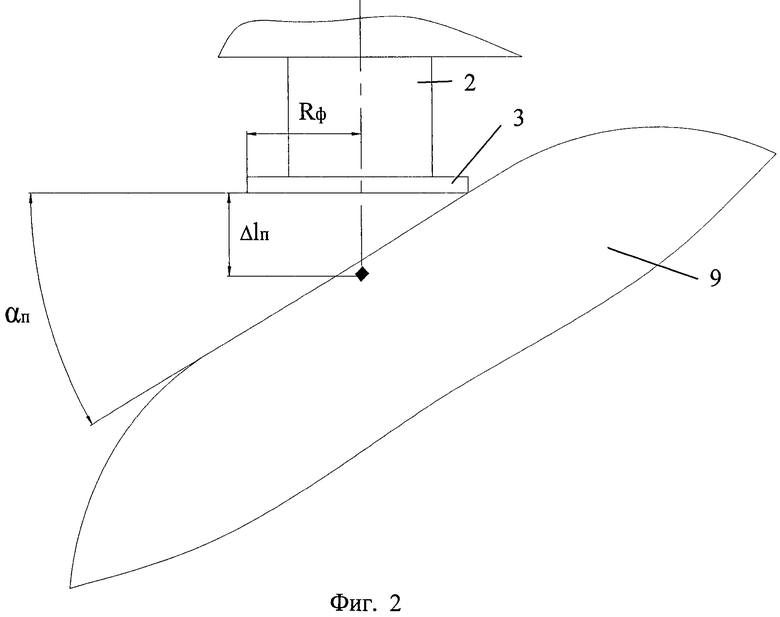
Сущность изобретения поясняется фиг.1, на которой представлен подводный аппарат перед началом наклона за счет подтягивания, и фиг.2, на которой представлена схема параметров, определяющих выдвижение захвата за плоскость стыковочного фланца камеры присоса в этот же момент времени.
Подводный аппарат с корпусом 1 имеет камеру присоса 2 со стыковочным фланцем 3. Внутри камеры присоса размещено устройство закрепления и подтягивания, включающее захват 4, соединенный с двумя силовыми тягами изменяемой длины 5, а также управляющую тягу изменяемой длины 6, соединенной с одной из тяг 5. Захват 4 закреплен за элемент спасательного люка 7 комингс-площадки 8 аварийного подводного объекта 9.
Подводный аппарат осуществляет посадку на плоскость комингс-площадки 8 внешней наружной кромкой стыковочного фланца 3 камеры присоса 2. В этом положении осуществляется закрепление захвата 4 за элемент спасательного люка 7 путем изменения длины тяг 5 и 6. При этом изменение длины тяг 5 обеспечивает перемещение захвата в плоскости угла, образованного этими тягами, а изменение длины тяги 6 обеспечивает поворот указанной плоскости вокруг оси, образованной шарнирами крепления верхних концов тяг 5, в целом обеспечивая перемещение захвата в трехмерном пространстве.
После закрепления захвата 4 производится его подтягивание по направлению внутрь камеры присоса за счет уменьшения длины тяг 5. При этом происходит увеличение наклона аппарата 1, поворачивающегося вокруг точки касания стыковочного фланца плоскости комингс-площадки 3, до соприкосновения плоскостей стыковочного фланца камеры присоса и комингс-площадки 8.
Расчеты показывают, что для спасательных подводных аппаратов водоизмещением до 55 т может быть обеспечена стыковка с комингс-площадкой аварийного подводного объекта, наклоненной к горизонту на угол до 60 градусов.
При этом повышается надежность стыковки при сохранении удобства выполнения требуемых операций без увеличения водоизмещения аппарата и при использовании камеры присоса простой конструкции (цилиндрическая, не поворотная), позволяющей работать с подводного носителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ АППАРАТ С ПОВОРОТНОЙ КАМЕРОЙ СТЫКОВКИ И ПРИСОСА И УСТРОЙСТВОМ ЦЕНТРИРОВАНИЯ И ПОДТЯГИВАНИЯ | 2011 |
|
RU2468961C1 |
| СПАСАТЕЛЬНО-ТРАНСПОРТНЫЙ ПОДВОДНЫЙ АППАРАТ С УСТРОЙСТВАМИ КРЕПЛЕНИЯ К КОМИНГС-ПЛОЩАДКЕ ПОДВОДНОГО ОБЪЕКТА | 2012 |
|
RU2526365C2 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ПОДВОДНОГО АППАРАТА ЗА КОМИНГС-ПЛОЩАДКУ ПОДВОДНОГО ОБЪЕКТА | 2011 |
|
RU2509028C2 |
| УСТРОЙСТВО ДЛЯ СТЫКОВКИ СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА С ПОДВОДНЫМ ОБЪЕКТОМ И СПОСОБ СТЫКОВКИ С ЕГО ИСПОЛЬЗОВАНИЕМ | 2004 |
|
RU2250858C1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДВОДНОГО АППАРАТА | 1996 |
|
RU2157776C2 |
| Спасательный подводный аппарат | 2018 |
|
RU2736510C2 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2016 |
|
RU2615029C1 |
| УСТРОЙСТВО КРЕПЛЕНИЯ СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА К АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКЕ | 2021 |
|
RU2786059C1 |
| Самоходный телеуправляемый спасательный колокол | 2017 |
|
RU2679381C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2007 |
|
RU2334650C1 |
Изобретение относится к области судостроения, более конкретно к подводным аппаратам, предназначенным для спасения людей с аварийных подводных объектов. Спасательный подводный аппарат содержит корпус и камеру присоса с размещенным в ней устройством закрепления и подтягивания захвата, обеспечивающим выдвижение захвата за нижнюю плоскость стыковочного фланца камеры присоса не менее величины, определяемой требуемым углом наклона аппарата за счет подтягивания. Приведено конкретное выполнение устройства закрепления и подтягивания захвата. Технический результат заключается в повышении надежности стыковки спасательного подводного аппарата с комингс-площадкой, наклоненной к горизонту на большие углы (до 60 град). 7 з.п. ф-лы, 2 ил.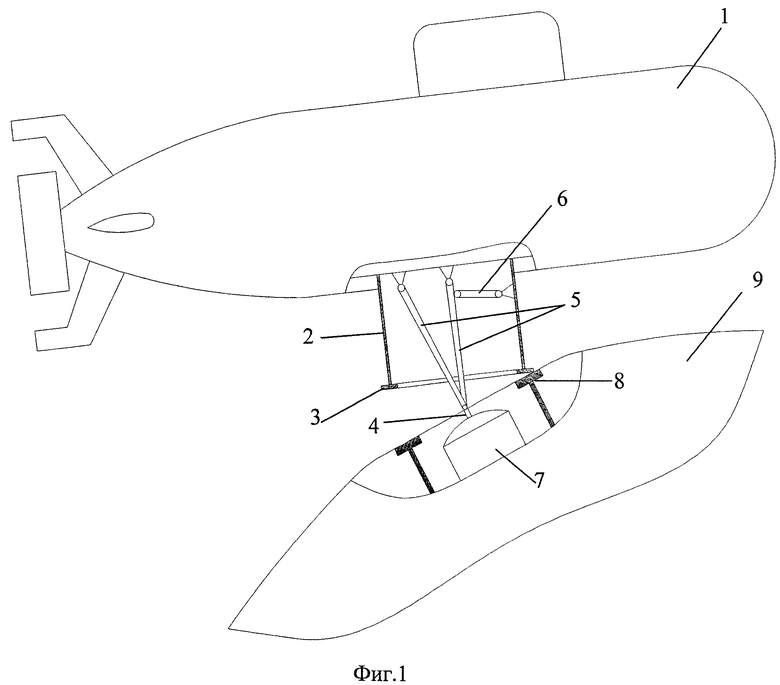
1. Спасательный подводный аппарат, содержащий корпус, камеру присоса с размещенным в ней средством подтягивания захвата и манипулятор для закрепления захвата на подводном объекте, отличающийся тем, что манипулятор установлен в камере присоса, образуя вместе со средством подтягивания захвата устройство закрепления и подтягивания и обеспечивая выдвижение захвата за нижнюю плоскость стыковочного фланца камеры присоса не менее величины, определяемой требуемым углом наклона аппарата за счет подтягивания.
2. Спасательный подводный аппарат по п.1, отличающийся тем, что средство подтягивания выполнено в виде лебедки с тросом, соединенным с захватом, а число степеней свободы манипулятора устройства закрепления и подтягивания принято равным не менее четырех.
3. Спасательный подводный аппарат по п.1, отличающийся тем, что наибольшая величина выдвижения захвата за нижнюю плоскость стыковочного фланца камеры присоса ограничена значением, определяемым параметрами устройства закрепления и подтягивания и ограничениями, налагаемыми элементами спасательного люка, по выражению:

где Δ1ПН - наибольшая требуемая величина выдвижения захвата устройства за нижнюю плоскость стыковочного фланца (м);
RФ - радиус внешней нижней кромки стыковочного фланца камеры присоса (м);
Т - допустимая наибольшая величина тяги устройства (кН);
Т=min (ТУМАХ; ТДОП);
ТУМАХ - максимальная тяга устройства (кН);
ТДОП - тяга, допустимая из условий прочности элементов спасательного люка, за которые закрепляется захват устройства (кН);
D - водоизмещение спасательного подводного аппарата (кН);
h - начальная метацентрическая высота аппарата, отнесенная к величине D (м).
4. Спасательный подводный аппарат по п.1, отличающийся тем, что устройство закрепления и подтягивания выполнено в виде трехстепенного силового манипулятора, состоящего из трех тяг изменяемой длины, две из которых - силовые - расположены вдоль оси камеры присоса и верхними концами шарнирно закреплены на конструкциях корпуса аппарата или камеры присоса таким образом, чтобы шарниры были разнесены от оси камеры присоса, а линия, проходящая через оси шарниров, была параллельна основной плоскости аппарата, нижними концами шарнирно соединены в одной точке и соединены с подвижным захватом, а третья тяга - управляющая - расположена максимально перпендикулярно к плоскости, образованной силовыми тягами, и одним концом закреплена на конструкциях корпуса аппарата или камеры присоса, другим концом шарнирно закреплена на одной из силовых тяг.
5. Спасательный подводный аппарат по п.4, отличающийся тем, что тяги изменяемой длины выполнены в виде гидроцилиндров, а силовые тяги выполнены телескопическими многократного действия.
6. Спасательный подводный аппарат по п.4, отличающийся тем, что тяги изменяемой длины выполнены в виде пары винт-гайка с электроприводом, а силовые тяги выполнены многоступенчатого действия.
7. Спасательный подводный аппарат по п.1, отличающийся тем, что нижняя кромка стыковочного фланца камеры присоса выполнена закругленной.
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДВОДНОГО АППАРАТА | 1996 |
|
RU2157776C2 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2004 |
|
RU2276647C1 |
| УСТРОЙСТВО ДЛЯ СТЫКОВКИ СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА С ПОДВОДНЫМ ОБЪЕКТОМ И СПОСОБ СТЫКОВКИ С ЕГО ИСПОЛЬЗОВАНИЕМ | 2004 |
|
RU2250858C1 |
| DE 19718163 A1, 05.11.1998 | |||
| ГАЗОВЫЙ ФИЛЬТР | 2012 |
|
RU2511372C1 |

