Данное изобретение относится к устройству и способу регистрации дефектов в контролируемом образце при неразрушающем и бесконтактном контроле посредством измерения вихревых токов или измерения магнитного потока рассеяния. Изобретение относится также к устройству и способу регистрации электропроводных частиц в текущей в трубе жидкости, причем регистрируют наведенные в частицах вихревые токи.
Известно, что способ измерения при регистрации дефектов в контролируемом образце, в частности в металлической заготовке, при неразрушающем и бесконтактном контроле заключается в наведении и измерении вихревых токов в контролируемом образце. При этом контролируемый образец посредством передающей катушки, через которую пропускают синусоидальный ток, подвергают воздействию периодических переменных электромагнитных полей. Вихревые токи, наведенные в контролируемом образце, в свою очередь, наводят в катушках, используемых в качестве датчика, периодический электрический сигнал, содержащий несущее колебание, соответствующее несущей частоте передатчика. Причем когда дефект попадает в диапазон чувствительности датчика, наличие дефекта в контролируемом образце способствует формированию характерной амплитуды и/или фазы сигнала. Как правило, контролируемый образец для обнаружения в нем дефектов перемещают относительно датчика прямолинейно. Кроме того, известны устройства с вращающимся датчиком. Вихретоковое измерительное устройство с линейно перемещаемым контролируемым образцом известно из патентного документа US 5175498.
Аналогичным образом электропроводные частицы в жидкости, протекающей через катушки, наводят вихревые токи, причем измеряют эти вихревые токи путем измерения изменения полного сопротивления катушек. Таким образом, индуктивные катушки обеспечивают возможность регистрации электропроводных частиц в протекающей в трубе жидкости. Это особенно предпочтительно в случае, когда необходимо определить концентрацию металлических частиц в контуре циркуляции смазки машины и сделать заключение о состоянии машины (концентрация металлических частиц, как правило, является показателем износа машины).
Кроме того, при регистрации дефектов в контролируемом образце при неразрушающем и бесконтактном контроле существует способ измерений, известный как измерение магнитного потока рассеяния (или измерение магнитного поля рассеяния), при котором индуктивная катушка с магнитным ярмом намагничивает контролируемый образец, а магнитный поток рассеяния, созданный при этом образцом, измеряют соответствующим датчиком. Регистрация дефектов в контролируемом образце возможна благодаря их воздействию на магнитный поток рассеяния. Пример такого способа измерения магнитного потока рассеяния раскрыт в патентном документе US 4445088.
С помощью вихретоковых приборов с датчиками, вращающимися по периферии контролируемого образца, измеряют расстояние между головкой датчика и контролируемым образцом, что позволяет корректировать измерения расстояния, меняющегося в течение одного оборота, например, вследствие децентрирования или асимметрии поперечного сечения образца. Данное устройство известно из патентного документа DE 40 03 330 A1.
Из публикации WO 2006/007826 A1 известен вихретоковый прибор с цифровым устройством предварительной обработки данных, в котором запуск каскада аналого-цифровых преобразователей происходит с каждой n-ной целочисленной долей частоты несущего колебания, причем число n выбирают в зависимости от частоты дефектов, то есть отношения скорости движения контролируемого образца относительно датчика к эффективной ширине зоны чувствительности датчика.
В патентном документе US 4209744 описан вихретоковый прибор, содержащий тестер, имитирующий сигналы, соответствующие сигналам дефектов контролируемого образца, что позволяет осуществить комплексную проверку электронных устройств. Однако данный тестер способен имитировать только один сигнал дефектов с определенной амплитудой и определенной основной частотой. Даже если предусмотреть различные имитирующие сигналы дефектов, проверить все электронные приборы, как правило, невозможно. Кроме того, невозможно направить такой имитирующий сигнал дефекта к сертифицированному опорному элементу, не демонтируя все электронные устройства и не отправив их в лабораторию.
В документе WO 01/22075 A2 раскрыт вихретоковый прибор, посредством которого в процессе выполнения самокалибровки системы определяют интенсивность сигнала, полученного от участка контролируемого образца, не содержащего дефект.
В публикации GB 2192064 описан индукционный измерительный прибор, который для имитации дефекта посредством устройства самотестирования расстраивают путем включения светодиода.
Задача данного изобретения заключается в том, чтобы предложить устройство и способ регистрации дефектов в контролируемом образце при неразрушающем и бесконтактном контроле или устройство и способ регистрации электропроводных частиц в протекающей в трубе жидкости, в частности посредством измерения вихревых токов или магнитного потока рассеяния, при этом необходимо обеспечить минимальные издержки.
Эта задача решена благодаря способу по п.1 и способу по п.4 и, соответственно, устройству по п.10 и устройству по п.12.
Техническое решение согласно данному изобретению имеет следующее преимущество. Определение перемодуляции каскада аналого-цифровых преобразователей сигналом улавливающей катушки посредством блока обработки сигналов путем осуществления контроля формы кривой преобразованного в цифровую форму сигнала улавливающей катушки, а также восстановление части сигнала улавливающей катушки, срезанной каскадом аналого-цифровых преобразователей, путем математической аппроксимации преобразованного в цифровую форму сигнала улавливающей катушки, позволяет сэкономить на необходимых средствах аппаратного обеспечения, в частности это связано с тем, что благодаря восстановлению сигнала требования к динамическому диапазону аналого-цифрового преобразователя не такие высокие, вследствие чего возможно использование наименее затратного аналого-цифрового преобразователя. Таким образом, такое восстановление сигнала посредством программного обеспечения позволяет расширить диапазон измерений, определенный средствами аппаратного обеспечения. Кроме того, существует возможность посредством восстановления сигнала зарегистрировать в количественном отношении ошибку, возникшую при перемодуляции аналого-цифрового преобразователя вследствие неисправности какого-либо элемента, это увеличивает вероятность быстрой локализации ошибки.
Каскад аналого-цифровых преобразователей предпочтительно является запускаемым, причем преобразованный в цифровую форму и при необходимости восстановленный сигнал улавливающей катушки фильтруют посредством частотных фильтров с тем, чтобы получить демодулированный полезный сигнал, причем запуск каскада аналого-цифровых преобразователей происходит с каждой n-ной целочисленной долей частоты несущего колебания, причем число п выбирают в зависимости от частоты дефектов, а именно отношения скорости движения контролируемого образца относительно улавливающих катушек к эффективной ширине зоны чувствительности улавливающих катушек, причем частотные фильтры регулируют в зависимости от частоты дефектов.
Ниже представлено подробное описание изобретения со ссылкой на прилагаемые чертежи, на которых изображено следующее.
На фиг.1 изображена структурная схема предлагаемого индукционного измерительного устройства с функциями самотестирования и калибровки.
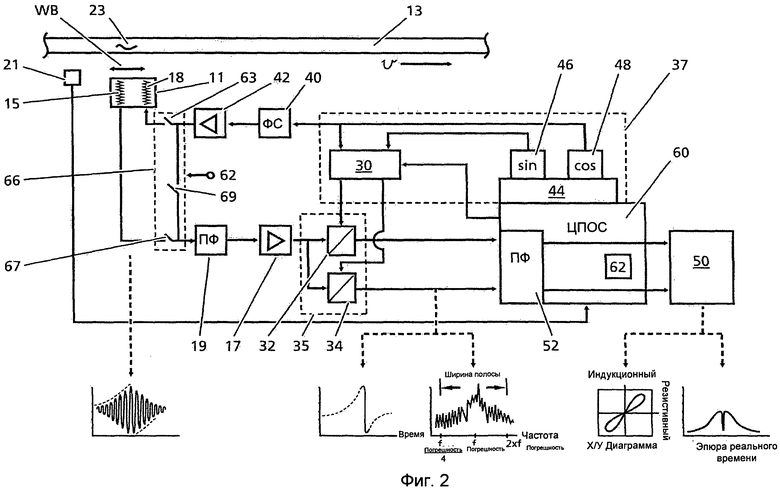
На фиг.2 изображена структурная схема варианта осуществления предлагаемого индукционного измерительного устройства, предназначенного для регистрации дефектов в перемещаемом контролируемом образце.
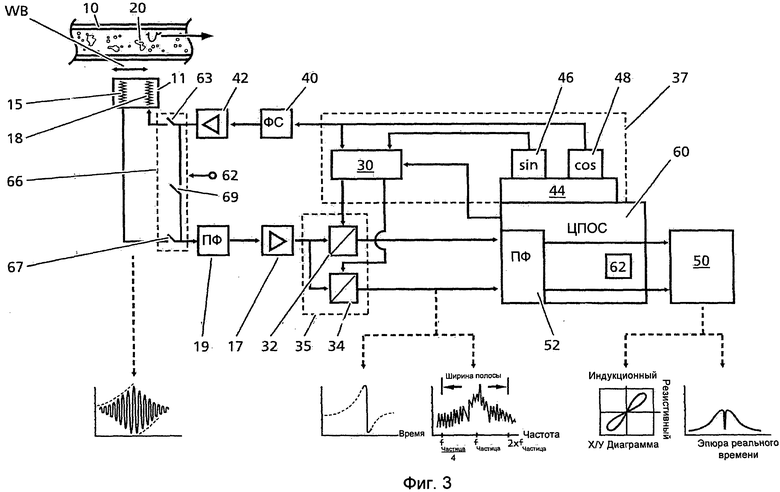
На фиг.3 изображена структурная схема варианта осуществления предлагаемого индукционного измерительного устройства, предназначенного для регистрации электропроводных частиц в текущей жидкости.
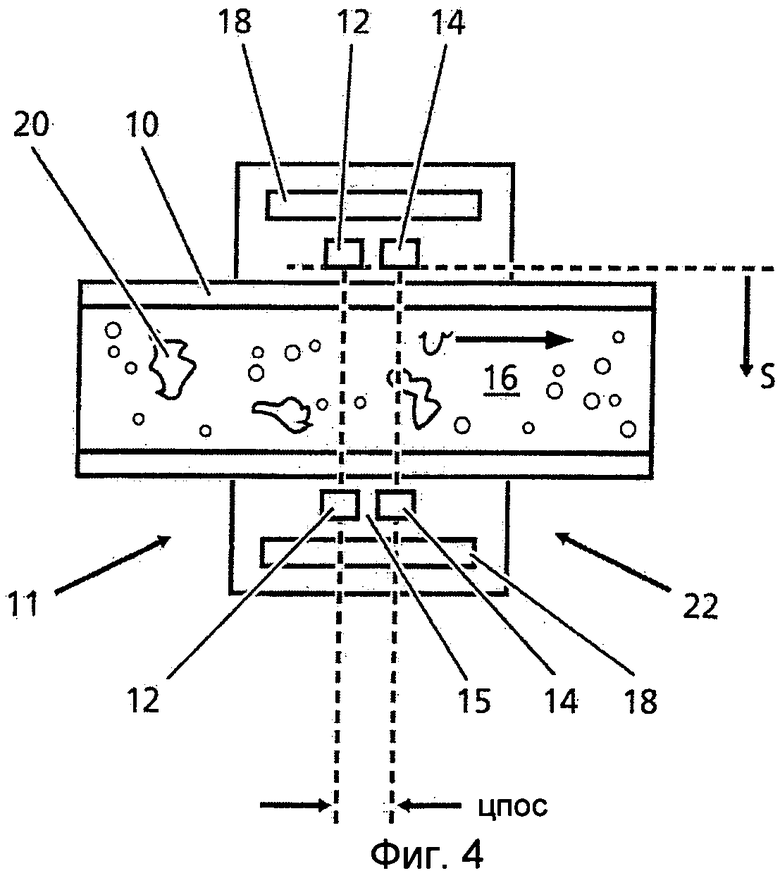
Фиг.4 изображает схематичный продольный разрез трубы с текущей в ней жидкостью, причем на трубе предусмотрены передающая и улавливающая катушки соответственно, для использования с измерительным устройством согласно фиг.3.
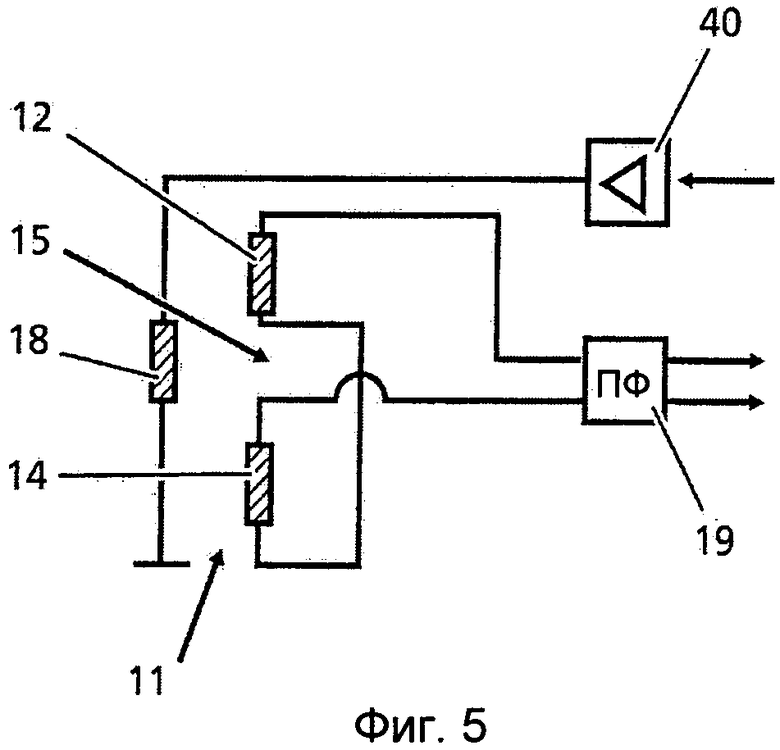
На фиг.5 изображена структурная схема соединения катушек, представленных на фиг.4.
На фиг.1 представлена структурная схема предлагаемого индукционного измерительного устройства с функциями самотестирования и калибровки. Процессор 60 обработки сигналов взаимодействует с PAL-элементом 68, предназначенным для управления аналого-цифровыми и цифроаналоговыми преобразователями. PAL-элемент 68 питает формирователь 70 передающей катушки, имеющий датчик 72 тока, и выдает сигнал для передающих катушек (на фиг.1 не показано) датчика 11 (измерительной головки). Сигнал, полученный улавливающими катушками (на фиг.1 не показано) датчика 11, поступает в малошумящий усилитель 74, выполняющий функцию предварительного усилителя, при этом процессор 60 посредством PAL-элемента 68 контролирует или регулирует его усиление. Усиленный усилителем 74 сигнал проходит через резонансный фильтр 78 и после преобразования в цифровую форму в аналого-цифровом преобразователе 80, имеющем, например, разрядность 18 бит, поступает в PAL-элемент 68 и далее в процессор 60 для обработки или анализа. Таким образом, из сигнала улавливающей катушки формируется полезный сигнал, обрабатываемый в устройстве обработки данных, выполненном в виде процессора 60 и/или внешнего устройства, например ПК (персонального компьютера) 64.
Кроме того, данная система содержит датчик 82 расстояния с передающей и улавливающей катушками (катушки не показаны), предназначенный для получения из сигнала улавливающей катушки датчика 82 сигнала расстояния, представляющего собой показатель расстояния между контролируемым образцом и датчиком 11. Для этого предусмотрен формирователь 84 передающей катушки датчика 82 расстояния, который имеет датчик 86 тока и питается от PAL-элемента 68. Сигнал улавливающей катушки датчика 82 расстояния поступает в блок 88, в котором происходит усиление, сдвиг и выпрямление сигнала расстояния. PAL-элемент 68 контролирует блок 88, точно так же как и усилитель 74. Таким образом, обработанный сигнал расстояния через аналого-цифровой преобразователь 90, имеющий, например, разрядность 16 бит, поступает в PAL-элемент 68 и далее в процессор 60 для обработки. Возможно использование нескольких датчиков 82 расстояния.
Элементы 68, 70, 74, 76, 78, 80 и при необходимости элемент 60, а также элементы 84, 86, 88 и 90 являются частью блока обработки сигналов, из сигналов улавливающей катушки они формируют полезный сигнал для обработки посредством блока обработки данных.
В процессоре 60 предусмотрен блок 62 самотестирования, который автоматически, например, при каждом пуске системы, или по запросу через интерфейс пользователя, реализованного, например, в виде ПК 64 и/или сенсорного дисплея 65, осуществляет систематический количественный контроль функций обработки сигналов блока обработки сигналов устройства предварительной обработки данных и систематический количественный контроль датчика 11 и датчика 82 расстояния.
Для управления блоком обработки сигналов предусмотрено переключающее устройство 66, содержащее три переключателя 63, 67, 69 и включаемое блоком 62 самотестирования (при этом переключатели 63 и 67 разомкнуты, а переключатель 69 замкнут), причем сигнал для передающей катушки датчика 11 подобно периодическому входному сигналу поступает непосредственно в блок обработки сигналов, то есть на вход усилителя 74, в обход передающей катушки.
В процессе самотестирования блок 62 самотестирования обеспечивает изменение частоты и амплитуды сигнала для передающей катушки, чтобы проверить, находятся ли измеренное усиление усилителя 74 и измеренные предельные частоты и крутизна характеристик частотного фильтра 78 в пределах заданной спецификации, причем, если спецификация не выполнена, в интерфейс 64 или 65 пользователя поступает соответствующий сигнал ошибки.
Данное устройство можно выполнить в виде многоканального устройства, причем в этом случае формирователь 70 передающей катушки, датчик 11 и переключающее устройство 66 предусмотрены в одном экземпляре для каждого канала, а перед усилителем 74 подключен мультиплексор 76 (в этом случае для каждой передающей катушки предусмотрена собственная частота). Между формирователем 84 и блоком 88 предусмотрено переключающее устройство 92 самотестирования, содержащее три переключателя 89, 91, 93 и включаемое блоком 62 самотестирования (при этом переключатели 89 и 91 разомкнуты, а переключатель 93 замкнут), в результате чего происходит самотестирование блока 88 или аналого-цифрового преобразователя 90 благодаря тому, что сигнал, выданный формирователем 84 катушки, поступает прямо на вход блока 88 в обход передающей катушки датчика 82 расстояния, причем посредством блока 62 самотестирования возможно систематическое изменение частоты и амплитуды сигнала формирователя катушки.
Перед аналого-цифровым преобразователем 90 подключен мультиплексор 94, в который кроме выходного сигнала блока 88 поступает токовый сигнал датчика 72 тока и токовый сигнал датчика 86 тока, причем сигналы датчиков тока поступают на обработку так же, как в случае блока 62 самотестирования. По току передающей катушки, зарегистрированному датчиком 72 тока или, соответственно, датчиком 86 тока, и напряжению передающей катушки посредством блока 62 самотестирования можно устанавливать и контролировать полное сопротивление соответствующей передающей катушки, причем при необходимости через интерфейс 64 или 65 выдается сигнал ошибки. Напряжения передающих катушек измерены в точках 1 и 3 соответственно, через мультиплексор 94 и аналого-цифровой преобразователь 90 они поступают в PAL-элемент.
Кроме того, блок 62 самотестирования выполнен с возможностью осуществления контроля напряжения разбаланса (напряжение разбаланса имеют только дифференциальные катушки) улавливающей катушки датчика 11 (напряжение разбаланса катушки возникает в каждой дифференциальной катушке, так как не существует двух совершенно идентичных катушек).
Предусмотрена возможность устранения напряжения разбаланса из принятого сигнала посредством фильтра верхних частот, в этом случае разность напряжений перед фильтром и после него дает напряжение разбаланса.
Предпочтительно блок 62 самотестирования обеспечивает возможность хранения тока передающей катушки и напряжения разбаланса улавливающей катушки в запоминающем устройстве в виде функции времени, что позволяет контролировать изменения передающих и улавливающих катушек в течение длительного времени. Этот контроль особенно важен, когда система выполнена в виде индукционного счетчика частиц, так как в этом случае без затруднений снять и проверить катушки невозможно.
Кроме того, блок 62 самотестирования обеспечивает возможность осуществления калибровки электронных схем обработки сигналов посредством сертифицированного калибровочного эталона 96, устанавливаемого вместо датчика 11. Со стороны входа калибровочный эталон 96 подключен к формирователю передающей катушки 70, со стороны выхода - к мультиплексору 76 или усилителю 74. Если калибровочный эталон 96 содержит несколько опорных элементов, например различные резисторы, которые в процессе калибровки необходимо переключать, то для включения соответствующих опорных элементов в калибровочном эталоне 96 предусмотрен соединительный элемент 98, например шина I2C, подсоединяемая к процессору 60 или блоку 62 самотестирования.
Точки 2 и 4 обеспечивают возможность определения напряжения непосредственно перед входными каналами усилителя 74 или блока 88. Вследствие чего становится возможным, например, измерить падение напряжения непосредственно на опорном элементе, например на калибровочном эталоне 96, установленном вместо соответствующей катушки.
Калибровочный эталон предпочтительно имеет по меньшей мере одно RC-звено, содержащее по крайней мере один калиброванный измерительный резистор, который обеспечивает возможность проверки точности аналого-цифровых преобразователей электронных схем обработки сигналов. Кроме того, точно известная предельная частота RC-звена обеспечивает возможность проверки частоты дискретизации процессора 60. Чтобы подавить помехи, измерительный резистор калибровочного эталона 96 выполнен в виде фильтра нижних частот. В качестве опорного элемента он обеспечивает определенное напряжение на входе аналого-цифрового преобразователя 80, в результате чего также можно исключить нежелательные колебания частоты дискретизации.
Калибровку проводят, например, один раз в год.
Калибровочный эталон 96 представляет собой отдельный, не зависящий от измерительного устройства блок, подключаемый к измерительному устройству в предусмотренном для этого месте только при проведении калибровки. Преимущество такого конструктивного исполнения заключается в том, что контролировать калибровку калибровочного эталона можно несложным способом в сертифицированной калибровочной лаборатории.
В качестве альтернативного варианта калибровочный эталон 96 можно выполнить как часть измерительного устройства, например, в виде элемента, расположенного на плате измерительного устройства и подключаемого при необходимости вместо соответствующей катушки. Преимущество данного конструктивного исполнения заключается в том, что нет необходимости открывать измерительное устройство при подготовке к калибровке. Очевидно, в этом случае невозможно контролировать калибровку калибровочного эталона.
В частности использование калибровочного эталона 96 целесообразно при калибровке регулируемого предварительного усилителя 74. В случае если с целью экономии калибровочный эталон 96 имеет только одно или несколько опорных значений сопротивления, возможен следующий способ калибровки. Формирователь 70 передающей катушки подает на RC-звено калибровочного эталона 96 постоянное синусоидальное напряжение, которое имеет такое значение, что при низкой чувствительности усилителя 74 синусоидальный сигнал посредством аналого-цифрового преобразователя 80 преобразуется в цифровую форму с заданной точностью. Если посредством PAL-элемента 68 коэффициент усиления возрастает, то синус в какой-то момент времени срезается, причем в этом случае предусмотрена возможность восстановления срезанного синуса путем математической аппроксимации, например, используя конфлюэнтный анализ, вследствие чего можно измерить фактическую амплитуду сигнала. Осуществление данного способа возможно при условии, что используемые электронные устройства функционируют без эффекта “защелкивания” и, например, входной каскад аналогово-цифровых преобразователей 80 защищен от разрушения в результате перенапряжения.
Например, для синуса можно решить следующее уравнение конфлюэнтного анализа:
A0∗n+A1∗[sin(x)]+A2∗[cos(x)]=[yi]
A0∗[sin(x)]+A1∗[sin2(x)]+A2∗[sin(x)∗cos(x)]=[yi∗sin(x)]
A0∗[cos(x)]+A1∗[sin(x)∗cos(x)]+A2∗[cos2(s)]=[yi∗cos(x)]
где yi - измеренные значения, y(i)=A0+A1∗sin(x)+A2∗cos(x), a x=2∗π∗f∗i∗dt, где f - частота. В соответствии с принятой в математической статистике формой записи квадратные скобки обозначают суммирование по управляющей переменной i от нуля до n. При этом те измеренные величины, которые лежат за пределами допустимого диапазона, то есть “отрезанные” значения, не используют. Параметр x представляет собой текущий угол. Он не должен быть эквидистантным.
Вычислив абсолютную величину A1 и A2, получают исходную амплитуду A=SQRT(A1∗A1+A2∗A2) и сдвиг фазы PHI=arctan(A2/A1). Очевидно, описанный способ восстановления сигнала можно использовать не только при контроле регулируемого усилителя 74, но и непосредственно при осуществлении вихретоковой дефектоскопии, в случае если в улавливающей катушке возникают сигналы, вызывающие перемодуляцию аналого-цифрового преобразователя. Вследствие чего, такой способ восстановления сигнала обеспечивает возможность расширения диапазона измерений посредством программного обеспечения.
Такой относительно простой контроль регулируемого усилителя 74 позволяет, например, хранить в запоминающем устройстве поправочные коэффициенты и использовать их для соответствующего усиления, вследствие чего становится возможным изготовить усилитель при заданном качестве с меньшими затратами.
Резонансные фильтры, например резонансный фильтр 78 (или комбинация фильтра верхних частот и фильтра нижних частот), выполнены с возможностью функционирования с переменной несущей частотой передатчика, причем наиболее оптимальная частота дискретизации представляет собой функцию, зависящую от скорости перемещения контролируемого образца, эффективной ширины зоны чувствительности катушки и несущей частоты передатчика. Как сказано выше, при самотестировании путем изменения частоты и амплитуды входного напряжения можно определить предельные частоты и крутизну амплитудно-частотной характеристики фильтров на границе полосы пропускания.
Указанные измерения полного сопротивления передающих и улавливающих катушек посредством блока 62 самотестирования позволяют своевременно обнаружить изменения в датчиках, и прежде всего различные неисправности, что обеспечивает возможность максимально сократить время, в течение которого контроль осуществляется посредством неисправных датчиков. В результате измерения становятся более надежными.
Указанное измерение напряжения разбаланса улавливающей катушки посредством блока 62 самотестирования позволяет своевременно обнаружить проблемы, связанные с перенапряжением, например, в совокупности с определенными материалами контролируемых образцов, после этого принять предупредительные меры и, таким образом, повысить надежность контроля.
Возможность осуществления калибровки системы посредством блока 62 самотестирования и калибровочного эталона 96 позволяет провести несложную калибровку системы на месте, причем не требуется производить демонтаж из системы и устанавливать в тестовый адаптер. В результате снижаются расходы на изготовления и обслуживание системы, так как исключена адаптация устройства предварительной обработки данных в тестовом приборе.
Очевидно, что возможно осуществление калибровки непосредственно калибровочного эталона 96 в случае, если он выполнен в виде отдельного блока, обратившись в сертифицированную калибровочную лабораторию.
На фиг.2 представлена структурная схема варианта осуществления предлагаемого индукционного измерительного устройства, который используют для регистрации дефектов в перемещаемом контролируемом образце и в котором применен способ цифровой демодуляции, включая описанное согласно фиг.1 восстановление сигнала при перемодуляции каскада аналого-цифровых преобразователей. Подобное устройство, не содержащее функцию самотестирования и восстановления сигнала, раскрыто в публикации WO 2006/007826 A1. При этом проверяют контролируемый образец 13 в виде промышленной заготовки, в частности слитка, движущийся линейно с переменной скоростью v мимо датчика 11, причем скорость регистрируют посредством датчика 21 скорости, который, например, выдает сигнал, по существу пропорциональный скорости v. Сигнал, например, представляет собой сигнал прямоугольной формы (возможен также двухдорожечный сигнал, позволяющий различать движение вперед и назад), в котором, к примеру, на каждые 5 мм движения образца 13 содержится один импульс.
Датчик 11 имеет передатчик в виде передающей катушки 18 и улавливающую катушку 15. Передающая катушка 18 предназначена для того, чтобы посредством переменного электромагнитного поля по меньшей мере с одной несущей частотой наводить в образце 13 вихревые токи, которые, в свою очередь, наводят в улавливающей катушке 15 переменное напряжение, действующее в качестве сигнала датчика и содержащее в себе несущее колебание с несущей частотой передающей катушки 18. Причем когда дефект 23 попадает в эффективную ширину WB зоны чувствительности улавливающей катушки 15, наличие дефекта 23 способствует формированию амплитуды и фазы сигнала. Улавливающая катушка 15 предпочтительно выполнена в виде дифференциальной катушки, то есть в виде катушки с двумя обмотками, намотанными в противоположных направлениях, которая реагирует только на изменение электрических свойств контролируемого образца, вызванное наличием дефекта 23. Дифференциальные катушки предназначены, прежде всего, для обнаружения внезапных изменений в образце 13. Кроме того, в качестве улавливающей катушки 15 можно использовать абсолютную катушку, содержащую несколько обмоток, намотанных в одном направлении, и предназначенную, в частности, для обнаружения в контролируемом образце 13 протяженных гомогенных изменений.
Напряжение передающей катушки 18 может быть создано, например, благодаря тому, что бинарный сигнал, вырабатываемый датчиком 44 времени, поступает в виде предварительно установленной частоты в генератор 48, формирующий из этого сигнала сигнал прямоугольной или синусоидальной формы, который проходит через формирователь 40 сигналов, и далее до подведения в передающую катушку 18 усиливается усилителем 42 мощности. Предпочтительно сигнал имеет синусоидальную форму. Обычно он имеет только одну несущую частоту, тем не менее возможны измерения с несколькими несущими частотами и/или с несущими сигналами, значительно отличающимися от синусоидальных колебаний. Обычно несущая частота составляет от 1 кГц до 5 МГц.
Кроме того, существует возможность возбуждения передающей катушки цифровым сигналом на основе широтно-импульсной модуляции. В этом случае преимущество заключается в значительном снижении потерь мощности в возбуждающем каскаде.
До подведения в каскад 35 аналого-цифровых преобразователей сигнал датчика, принятый улавливающей катушкой 15, проходит полосовой фильтр 19 и регулируемый предварительный усилитель 17. При дискретизации сигнала в аналого-цифровом преобразователе 35 полосовой фильтр 19 выполняет функцию фильтра подавления помех наложения, кроме того, он предназначен для отфильтровывания высокочастотных и низкочастотных помех. Регулируемый предварительный усилитель 17 предназначен для доведения амплитуды аналогового сигнала датчика до амплитуды, оптимальной для каскада 35 аналого-цифровых преобразователей.
Каскад 35 аналого-цифровых преобразователей содержит два параллельно включенных аналого-цифровых преобразователя 32 и 34 с высоким разрешением не менее 16 бит, предпочтительно не менее 22 бит, которые обеспечивают не менее 500 аналого-цифровых преобразований в секунду. Аналого-цифровой преобразователь 32, 34 предпочтительно выполнен в виде сверхбыстродействующего аналого-цифрового преобразователя или аналого-цифрового преобразователя с регистром последовательных приближений.
Исполнение с двумя аналого-цифровыми преобразователями представляет собой вариант изобретения. Важно, чтобы выборка сигнала о наличии дефекта осуществлялась ортогонально. По существу возможна реализация данной функции с использованием только одного преобразователя.
Каскад 35 аналого-цифровых преобразователей запускается управляющим устройством 37, которое содержит упомянутый датчик 44 времени, генератор 48 косинусоидальных колебаний, включенный параллельно ему генератор 46 синусоидальных колебаний, а также делитель 30 частоты. На вход делителя 30 частоты поступает сигнал, сформированный генератором 48 косинусоидальных колебаний, частота которого равна несущей частоте сигнала, подаваемого в передающую катушку 18, а также сигнал генератора 46 синусоидальных колебаний, соответствующий сигналу генератора косинусоидальных колебаний, но сдвинутый по фазе на 90°. Делитель 30 частоты делит на целое число n частоту каждого из этих двух сигналов. Соответствующий выходной сигнал с уменьшенной частотой предназначен для запуска аналого-цифрового преобразователя 32 и 34 соответственно. Выбор числа n для делителя 30 осуществляет цифровой процессор 60 обработки сигналов в зависимости от частоты дефектов, а именно отношения текущей скорости v движения контролируемого образца к эффективной ширине WB зоны чувствительности улавливающей катушки 15. Предпочтительно число n выбирают обратно пропорциональным основной частоте дефектов для того, чтобы частота следования импульсов запуска каскада 35 аналого-цифровых преобразователей была по меньшей мере приблизительно пропорциональна основной частоте дефектов. Таким образом, если при первом приближении эффективная ширина WB зоны чувствительности постоянна, то при более высокой скорости v движения контролируемого образца и, следовательно, более высокой частоте дефектов аналоговый сигнал датчика соответственно дискретизируется чаще.
Предпочтительно делитель 30 выполнен в виде так называемого PAL-элемента (ПМЛ-схемы), чтобы обеспечить поступление запускающего сигнала в каскад 35 аналого-цифровых преобразователей по возможности без задержки, то есть синхронно с выходным сигналом генератора 48 косинусоидальных колебаний и генератора 46 синусоидальных колебаний, и без фазовых флуктуаций.
За счет соответствующего сдвига фаз двух входных сигналов делителя 30 происходит запуск обоих аналого-цифровых преобразователей 32, 34 с постоянным сдвигом фаз 90°. Таким образом, аналоговый сигнал датчика можно оценить по двум компонентам, а именно по амплитуде и по фазе. Очевидно, запаздывание по фазе между запускающим сигналом каскада 35 аналого-цифровых преобразователей и сигналом передающей катушки 18 должно быть минимальным, кроме того, следует исключить так называемые фазовые флуктуации, то есть фазовые соотношения по времени постоянны.
Указанное управляющее устройство 37 обеспечивает дискретизацию аналогового сигнала датчика каждым аналого-цифровым преобразователем 32 и 34 не более одного раза на полную волну несущего колебания (в этом случае n равно 1). Тем не менее, в зависимости от текущей частоты дефектов, то есть скорости v движения контролируемого образца, n может быть значительно больше 1, вследствие чего дискретизация происходит только в каждой n-ной полной волне несущего колебания.
Как указано выше, важно, чтобы выборка осуществлялась ортогонально. Если выборку осуществляют при 0° и 90°, то получают комплексные компоненты сигнала дефекта. При 180° и 270° получают равные, но инверсные компоненты. Таким образом, путем инвертирования данных компонентов формируют среднее значение и работают с более высокой частотой дискретизации. Тем самым обеспечено преимущество в отношении шума и расчета параметров входного фильтра.
Демодулированный цифровой двухканальный выходной сигнал каскада 35 аналого-цифровых преобразователей проходит через полосовой фильтр 52, представленный процессором 60 обработки сигналов и предназначенный для отфильтровывания помех, лежащих за пределами полосы частот сигнала дефекта. В связи с этим предельную частоту фильтра верхних частот (программного фильтра) предпочтительно выбирают так, чтобы она составляла менее четверти частоты дефектов, а предельную частоту фильтра нижних частот - так, чтобы она по меньшей мере в два раза превышала частоту дефектов с тем, чтобы исключить вероятность отфильтровывание тех составляющих сигнала, в которых содержится информация о дефекте.
Цифровой полосовой фильтр 52 синхронизирован с частотой дискретизации каскада 35 аналого-цифровых преобразователей, а именно с частотой следования импульсов запуска. Это дает следующее значительное преимущество. Предельные частоты полосового фильтра при изменении частоты дефектов, то есть при изменении скорости v движения контролируемого образца, автоматически затягиваются вместе с частотой дефектов, так как предельные частоты цифрового полосового фильтра пропорциональны тактовой частоте, а тактовая частота через частоту дискретизации, задаваемую управляющим устройством 37, автоматически согласуется с изменением частоты дефектов.
Аналогичным образом происходит изменение несущей частоты передатчика. Таким образом, упрощена цифровая фильтрация на различных ступенях фильтрации.
Возможно введение информации по эффективной ширине WB зоны чувствительности, необходимой для определения основной частоты дефектов, в процессор 60 обработки сигналов вручную, либо эту информацию обеспечивает непосредственно датчик 11, например, как описано в публикации EP 0734522 B1.
Очевидно, что измерительная система аналогичным образом реагирует на изменения частоты дефектов, связанные с заменой улавливающей катушки 15 другой улавливающей катушкой с отличающейся эффективной шириной WB зоны чувствительности, при этом скорость v движения контролируемого образца остается постоянной.
Полезный сигнал, полученный после цифровой фильтрации посредством полосового фильтра 52 известным способом, подвергают обработке в блоке 50 обработки данных для регистрации дефектов 23 контролируемого образца 13 и определения их местоположения, причем, как правило, используют как информацию, содержащуюся в амплитуде сигнала дефекта, так и информацию, содержащуюся в фазе этого сигнала.
В частности, при относительно высоких значениях n, а именно в случае дискретизации относительно небольшого числа полных волн несущего колебания, между интервалами дискретизации, например, можно отключать или привести в нейтральное состояние передающую катушку 15 и/или электронные устройства обработки данных, в частности процессор 60 обработки сигналов, с целью уменьшения потребления мощности, что особенно существенно при использовании переносных измерительных устройств.
Для выполнения функций контроля и калибровки, в соответствии с фиг.1, в процессор 60 встроен блок 62 самотестирования. Блок 62 самотестирования управляет переключающим устройством 66, содержащим три переключателя 63, 67, 69, что обеспечивает подачу сигнала для передающей катушки 18 датчика 11 подобно периодическому входному сигналу непосредственно на этап обработки сигнала, то есть на вход полосового фильтра 19, в обход передающей катушки 18 и улавливающей катушки 15.
На фиг.3-5 показан пример осуществления предлагаемого индукционного измерительного устройства, который используют для регистрации электропроводных частиц в текущей жидкости и в котором применен метод цифровой демодуляции. Такое устройство, за исключением функции самотестирования, раскрыто в ранее неопубликованной немецкой патентной заявке с шифром документа 102007039434.0. По существу в данном случае преобразование сигнала, в частности его восстановление при перемодуляции каскада аналого-цифровых преобразователей, а также осуществление функции самотестирования происходит аналогично варианту изобретения, раскрытому выше и изображенному на фиг.2.
Согласно фиг.4 вокруг трубы 10 расположены первая индукционная улавливающая катушка 12 и вторая индукционная улавливающая катушка 14, размещенная (в осевом направлении) на некотором расстоянии от первой, так что текущая в трубе 10 жидкость 16 проходит через катушки 12 и 14 в осевом направлении. Осевое расстояние между двумя катушками 12, 14 и осевой размер катушек 12, 14 составляет, например, 2 мм. С внешней стороны двух улавливающих катушек 12, 14 расположена передающая катушка 18, установленная по отношению к обеим катушкам 12, 14 соосно и имеющая больший по сравнению с ними диаметр. Передающая катушка 18 имеет такой осевой размер, что обе улавливающие катушки 12, 14 полностью размещены внутри передающей катушки 18. Предпочтительно осевой размер передающей катушки 18 по меньшей мере в два раза превышает осевой размер устройства, состоящего из улавливающих катушек 12, 14, который равен сумме размеров катушек 12, 14 и расстояния между ними. Катушки 12, 14, 18 расположены в корпусе 22, окружающем трубу 10, и образуют датчик 11. Как правило, труба 10 является частью контура циркуляции машинной смазки, причем в этом случае жидкостью 16 является, например, смазка, в которой имеются металлические частицы, а именно продукты истирания движущихся деталей машины. Обычно расход смазки в основном потоке составляет 10 л/мин. При существенно более высоких значениях расхода целесообразно осуществлять измерения не в основном, а в побочном потоке. Согласно фиг.5 две улавливающие катушки 12, 14 включены субтрактивно в виде дифференциальной катушки 15, то есть они расположены встречно, вследствие чего в обеих катушках 12, 14 напряжения имеют одинаковую абсолютную величину, но противоположные знаки. В целом передающая катушка 18 и улавливающие катушки 12, 14 образуют трансформаторное устройство, причем передающая катушка образует первичную сторону, а улавливающие катушки 12, 14 - вторичную сторону. Сердечник трансформатора в таком устройстве сформирован проходящими через катушки 12, 14, 18 материалами или средами, а именно воздухом, корпусом 22, трубой 10 и жидкостью 16 с частицами 20.
Разность полного сопротивления катушек 12, 14, вызванная наличием частиц 20, а именно разность полного сопротивления двух катушек 12, 14, причиной которой является присутствие в данный момент в одной из двух катушек 12, 14 частицы 20 (размер частицы 20 значительно меньше расстояния между катушками 12, 14), отображается в виде сигнала, выдаваемого катушками 12 и 14.
На фиг.3 показан пример конструкции предлагаемого вихретокового измерительного устройства, в котором использован датчик 11.
Передающая катушка 18 предназначена для того, чтобы посредством переменного электромагнитного поля по меньшей мере с одной несущей частотой наводить в частицах 20 вихревые токи, которые, в свою очередь, наводят в улавливающей катушке 15, выполненной в виде дифференциальной катушки, переменное напряжение, которое действует в качестве сигнала датчика и содержит в себе несущее колебание с несущей частотой передающей катушки 18, причем если частица 20 попадает в эффективную ширину WB зоны чувствительности улавливающей катушки 15, ее наличие способствует формированию амплитуды и фазы сигнала.
Напряжение передающей катушки 18 создано, например, благодаря тому, что бинарный сигнал, вырабатываемый датчиком 44 времени, поступает в виде предварительно установленной частоты в генератор 48, формирующий из этого сигнала сигнал прямоугольной или синусоидальной формы, который проходит через формирователь 40 сигналов, а далее до подведения в передающую катушку 18, усиливается усилителем 42 мощности. Предпочтительно сигнал имеет синусоидальную форму. Обычно он имеет только одну несущую частоту, тем не менее возможны измерения с несколькими несущими частотами и/или с несущими сигналами, значительно отличающимися от синусоидальных колебаний. Предпочтительно несущая частота составляет от 5 кГц до 1 МГц.
До подведения в каскад 35 аналого-цифровых преобразователей сигнал датчика, принятый улавливающей катушкой 15, проходит полосовой фильтр 19 и регулируемый предварительный усилитель 17. При дискретизации сигнала в аналого-цифровом преобразователе 35 полосовой фильтр 19 выполняет функцию фильтра подавления помех наложения, кроме того, он предназначен для отфильтровывания низкочастотных помех посредством фильтра верхних частот. Регулируемый предварительный усилитель 17 предназначен для доведения амплитуды аналогового сигнала датчика до амплитуды, оптимальной для каскада 35 аналого-цифровых преобразователей.
Каскад 35 аналого-цифровых преобразователей содержит два параллельно включенных аналого-цифровых преобразователя 32 и 34 с высоким разрешением не менее 16 бит, предпочтительно не менее 22 бит, которые обеспечивают не менее 500 аналого-цифровых преобразований в секунду. Аналого-цифровой преобразователь 32, 34 предпочтительно выполнен в виде сверхбыстродействующего аналого-цифрового преобразователя или аналого-цифрового преобразователя с регистром последовательных приближений.
Тем не менее, если компенсация напряжения разбаланса осуществляется посредством дополнительного аналого-цифрового преобразователя и вычитателя, то достаточным является разрешение аналого-цифрового преобразователя 12 бит.
Каскад 35 аналого-цифровых преобразователей запускается управляющим устройством 37, которое содержит упомянутый датчик 44 времени, генератор 48 косинусоидальных колебаний, включенный параллельно ему генератор 46 синусоидальных колебаний, а также делитель 30 частоты. На вход делителя 30 частоты поступает сигнал, сформированный генератором 48 косинусоидальных колебаний, частота которого равна несущей частоте сигнала, подаваемого в передающую катушку 18, а также сигнал генератора 46 синусоидальных колебаний, соответствующий сигналу генератора косинусоидальных колебаний, но сдвинутый по фазе на 90°. Делитель 30 частоты делит на целое число n частоту каждого из этих двух сигналов. Соответствующий выходной сигнал с уменьшенной частотой предназначен для запуска аналого-цифрового преобразователя 32 и 34 соответственно. Выбор числа n для делителя 30 осуществляет цифровой процессор 60 обработки сигналов в зависимости от частоты прохождения частиц, а именно отношения текущей скорости v потока жидкости 16, то есть скорости движения частиц 20, к эффективной ширине WB зоны чувствительности улавливающей катушки 15. Предпочтительно число n выбирают обратно пропорциональным основной частоте прохождения частиц для того, чтобы частота следования импульсов запуска каскада 35 аналого-цифровых преобразователей была по меньшей мере приблизительно пропорциональна основной частоте следования частиц. Таким образом, если при первом приближении эффективная ширина WB зоны чувствительности постоянна, то при более высокой скорости v потока частиц и, следовательно, более высокой частоте прохождения частиц аналоговый сигнал датчика соответственно дискретизируется чаще.
Предпочтительно делитель 30 выполнен в виде так называемого PAL-элемента (ПМЛ-схемы), чтобы обеспечить поступление запускающего сигнала в каскад 35 аналого-цифровых преобразователей по возможности без задержки, то есть синхронно с выходным сигналом генератора 48 косинусоидальных колебаний и генератора 46 синусоидальных колебаний, и без фазовых флуктуаций.
За счет соответствующего сдвига фаз двух входных сигналов делителя 30 происходит запуск обоих аналого-цифровых преобразователей 32, 34 с постоянным сдвигом фаз 90°. Таким образом, аналоговый сигнал датчика можно оценить по двум компонентам, а именно по амплитуде и по фазе. Очевидно, запаздывание по фазе между запускающим сигналом каскада 35 аналого-цифровых преобразователей и сигналом передающей катушки 18 должно быть минимальным, кроме того, следует исключить так называемые фазовые флуктуации, то есть фазовые соотношения по времени постоянны.
Указанное управляющее устройство 37 обеспечивает дискретизацию аналогового сигнала датчика каждым аналого-цифровым преобразователем 32 и 34 не более одного раза на полную волну несущего колебания (в этом случае n равно 1). Тем не менее, в зависимости от текущей частоты прохождения частиц, то есть скорости v движения частиц, n может быть значительно больше 1, вследствие чего дискретизация происходит только в каждой n-ной полной волне несущего колебания.
Однако, так как во всех случаях на каждый аналого-цифровой преобразователь 32, 34 дискретизация происходит не более одного раза за полную волну, в результате такой субдискретизации из цифрового сигнала выделяется частота несущего колебания, то есть несущая частота. Таким образом, посредством субдискретизации происходит демодуляция аналогового сигнала датчика.
Предпочтительно число n выбирают так, что в интервале времени, в течение которого фиксируется существенный сигнал частицы, а именно в интервале времени, в течение которого частица 20 проходит через эффективную ширину WB зоны чувствительности улавливающей катушки 15, то есть в интервале времени, который по существу соответствует инверсии основной частоты прохождения частиц, каждый аналого-цифровой преобразователь 32 или 34 осуществляет по меньшей мере 5, предпочтительно по меньшей мере 20 выборок, чтобы получить информацию, содержащуюся в сигнале частицы, достаточном для точного обнаружения частицы. Тем не менее в течение такого интервала времени, как правило, достаточно осуществить не более 50, максимально 100 выборок, минимально 10 выборок.
Частоту несущего колебания следует выбирать так, чтобы она превышала частоту прохождения частиц не менее чем в десять раз, иначе сигнал частицы переносится слишком малым количеством полных волн несущего колебания, и регистрация частиц становится проблематичной.
Демодулированный цифровой двухканальный выходной сигнал каскада 35 аналого-цифровых преобразователей проходит через полосовой фильтр 52, представленный процессором 60 обработки сигналов и предназначенный для отфильтровывания помех, лежащих за пределами полосы частот сигнала частицы. В связи с этим предельную частоту фильтра верхних частот предпочтительно выбирают так, что она составляет менее четверти частоты прохождения частиц, а предельную частоту фильтра нижних частот - так, чтобы она по меньшей мере в два раза превышала частоту прохождения частиц, чтобы исключить вероятность отфильтровывание тех составляющих сигнала, в которых содержится информация о прохождении частиц.
Цифровой полосовой фильтр 52 синхронизирован с частотой дискретизации каскада 35 аналого-цифровых преобразователей, а именно с частотой следования импульсов запуска. Это дает следующее значительное преимущество. Предельные частоты полосового фильтра при изменении частоты прохождения частиц, то есть при изменении скорости v движения частиц, автоматически затягиваются вместе с частотой прохождения частиц, так как предельные частоты цифрового полосового фильтра пропорциональны тактовой частоте, а тактовая частота через частоту дискретизации, задаваемую управляющим устройством 37, автоматически согласуется с изменением частоты прохождения частиц.
Возможно введение информации по эффективной ширине WB зоны чувствительности, необходимой для определения основной частоты дефектов, в процессор 60 обработки сигналов вручную, либо эту информацию обеспечивает непосредственно датчик 11, например, как описано в публикации EP 0734522 B1.
Очевидно, что измерительная система аналогичным образом реагирует на изменения частоты прохождения частиц, связанные с заменой улавливающей катушки 15 другой улавливающей катушкой с отличающейся эффективной шириной WB зоны чувствительности, при этом скорость v движения частиц остается постоянной.
В частности, при относительно высоких значениях n, а именно в случае дискретизации относительно небольшого числа полных волн несущего колебания, между интервалами дискретизации, например, можно отключать или привести в нейтральное состояние передающую катушку 18 и/или электронные устройства обработки данных, в частности процессор 60 обработки сигналов, с целью уменьшения потребления мощности, что особенно существенно при использовании переносных измерительных устройств.
Полезный сигнал, полученный после цифровой фильтрации посредством полосового фильтра 52, подвергают обработке в блоке 50 обработки данных для регистрации прохождения частиц 20, причем используют как информацию, содержащуюся в амплитуде сигнала обнаружения частицы, так и информацию, содержащуюся в фазе этого сигнала.
Блок 50 обработки данных предпочтительно выполнен с возможностью осуществления подсчета зарегистрированных частиц, что позволяет сделать вывод о концентрации частиц в жидкости 16, а также при необходимости о состоянии машины.
По существу наличие разности сопротивления (отдельные катушки дифференциальной катушки на практике никогда не бывают одинаковыми) приводит к возникновению так называемого напряжения разбаланса дифференциальной катушки, которое может превышать собственно сигнал дефекта, например, на несколько порядков (в частности, в 100…30000 раз). В результате амплитуда сигнала улавливающей катушки превышает амплитуду собственно полезного сигнала, что приводит к предъявлению высоких требований к электронным схемам, в частности к аналого-цифровому преобразователю, в особенности к его разрешению.
Для выполнения функций контроля и калибровки, в соответствии с фиг.1, в процессор 60 встроен блок 62 самотестирования. Блок 62 самотестирования управляет переключающим устройством 66, содержащим три переключателя 63, 67, 69, что обеспечивает подачу сигнала для передающей катушки 18 датчика 11 подобно периодическому входному сигналу непосредственно на этап обработки сигнала, то есть на вход полосового фильтра 19, в обход передающей катушки 18 и улавливающей катушки 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ИНДУКЦИОННЫМ МЕТОДОМ | 2010 |
|
RU2527666C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РЕГИСТРАЦИИ ЭЛЕКТРОПРОВОДНЫХ ЧАСТИЦ В ЖИДКОСТИ | 2014 |
|
RU2645787C2 |
| УСТРОЙСТВО И СПОСОБ РЕГИСТРАЦИИ ЭЛЕКТРОПРОВОДНЫХ ЧАСТИЦ В ЖИДКОСТИ | 2014 |
|
RU2562911C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕРАЗРУШАЮЩЕГО ИСПЫТАНИЯ МАТЕРИАЛА ИСПЫТЫВАЕМОГО ОБЪЕКТА | 2012 |
|
RU2570593C2 |
| Электронная шахматная доска и способ ее работы | 2017 |
|
RU2640171C1 |
| СПОСОБ КОМПЛЕКСНОЙ ДИАГНОСТИКИ СВАРНЫХ ШВОВ РЕЛЬСОВ БЕССТЫКОВОГО ПУТИ И ПРИБОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2742599C1 |
| Дефектоскоп для сварных швов | 2015 |
|
RU2639592C2 |
| СПОСОБ МОНИТОРИНГА ВНУТРЕННИХ КОРРОЗИЙНЫХ ИЗМЕНЕНИЙ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2514822C2 |
| МНОГОКАНАЛЬНЫЙ ЦИФРОВОЙ РЕГИСТРАТОР СИГНАЛОВ | 2016 |
|
RU2616346C1 |
| УСТРОЙСТВО ДИАГНОСТИКИ КОНТРОЛЬНЫХ ЭЛЕМЕНТОВ УСТРОЙСТВА КОНТРОЛЯ СХОДА ПОДВИЖНОГО СОСТАВА (УКСПС) | 2014 |
|
RU2554028C1 |
Изобретение относится к устройству для регистрации дефектов (23) в контролируемом образце (13), перемещаемом относительно предлагаемого устройства, при неразрушающем и бесконтактном контроле, причем передающие катушки (18) намагничивают образец периодическими переменными электромагнитными полями, улавливающие катушки (15) регистрируют периодический электрический сигнал, содержащий несущее колебание, при этом, когда дефект регистрируется улавливающими катушками, наличие этого дефекта в контролируемом образце способствует формированию характерной амплитуды и/или фазы сигнала, каскад аналого-цифровых преобразователей преобразует сигнал улавливающей катушки в цифровую форму, блок (17, 19, 35, 37, 52, 60, 68, 74, 76, 78, 80, 88, 90, 94) обработки сигналов создает полезный сигнал из сигнала улавливающей катушки, преобразованного в цифровую форму, блок (60, 50, 64) обработки результатов обрабатывает полезный сигнал с целью обнаружения дефекта в контролируемом образце. В соответствии с изобретением посредством блока обработки сигналов путем осуществления контроля формы кривой преобразованного в цифровую форму сигнала улавливающей катушки определяют перемодуляцию каскада аналого-цифровых преобразователей сигналом улавливающей катушки, а затем путем математической аппроксимации преобразованного в цифровую форму сигнала улавливающей катушки восстанавливают часть сигнала, срезанную каскадом аналого-цифровых преобразователей. Технический результат - расширение диапазона измерений, увеличение вероятности быстрой локализации ошибки. 2 н. и 12 з.п. ф-лы, 5 ил.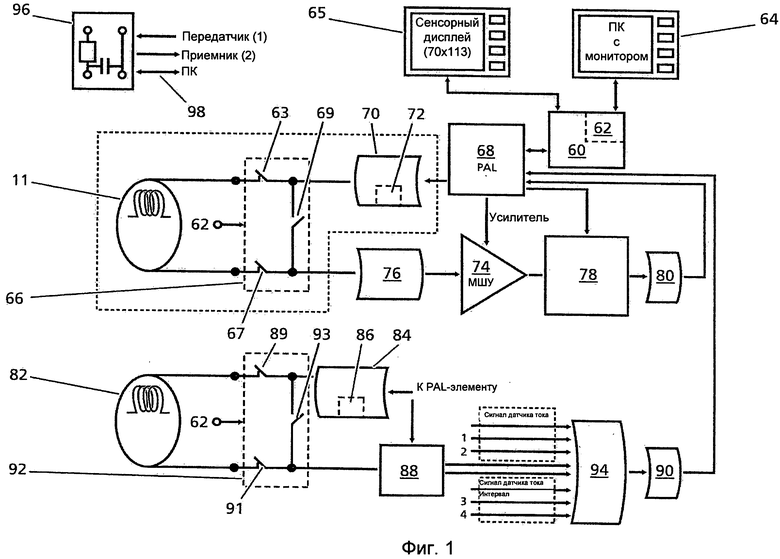
1. Способ регистрации дефектов (23), в частности посредством вихревых токов, в контролируемом образце (13), перемещаемом относительно устройства, при неразрушающем и бесконтактном контроле, в котором посредством передающих катушек (18) намагничивают контролируемый образец периодическими переменными электромагнитными полями, посредством улавливающих катушек (15) регистрируют периодический электрический сигнал, содержащий несущее колебание, при этом, когда улавливающие катушки регистрируют дефект в контролируемом образце, наличие дефекта способствует формированию амплитуды и/или фазы сигнала,
посредством каскада аналого-цифровых преобразователей сигнал улавливающей катушки преобразуют в цифровую форму, посредством блока (17, 19, 35, 37, 52, 60, 68, 74, 76, 78, 80, 88, 90, 94) обработки сигналов из сигнала улавливающей катушки, преобразованного в цифровую форму, создают полезный сигнал и
посредством блока (50, 60, 64) обработки данных полезный сигнал обрабатывают с целью обнаружения дефекта в контролируемом образце,
отличающийся тем, что
посредством блока обработки сигналов путем осуществления контроля формы кривой преобразованного в цифровую форму сигнала улавливающей катушки определяют перемодуляцию каскада аналого-цифровых преобразователей сигналом улавливающей катушки, а затем путем математической аппроксимации преобразованного в цифровую форму сигнала улавливающей катушки восстанавливают часть сигнала, срезанную каскадом аналого-цифровых преобразователей.
2. Способ по п.1, отличающийся тем, что каскад (35) аналого-цифровых преобразователей является запускаемым, причем преобразованный в цифровую форму и при необходимости восстановленный сигнал улавливающей катушки фильтруют посредством частотных фильтров (52, 78) с целью получения демодулированного полезного сигнала, причем каскад аналого-цифровых преобразователей запускают с каждой n-ной целочисленной долей частоты несущего колебания сигнала для передающих катушек (18).
3. Способ по п.2, отличающийся тем, что число n выбирают в зависимости от частоты дефектов, а именно отношения скорости движения контролируемого образца (13) относительно улавливающих катушек (15) к эффективной ширине зоны чувствительности улавливающих катушек, причем частотные фильтры регулируют в зависимости от частоты дефектов.
4. Способ по любому из пп.1-3, отличающийся тем, что срезанную часть сигнала улавливающей катушки восстанавливают путем конфлюэнтного анализа.
5. Способ по любому из пп.1-3, отличающийся тем, что амплитудная характеристика сигнала улавливающей катушки имеет форму синусоиды.
6. Способ по любому из пп.1-3, отличающийся тем, что автоматически или по внешнему запросу осуществляют систематический контроль функций обработки сигналов блока (17, 19, 35, 37, 52, 60, 68, 74, 76, 78, 80, 88, 90, 94) обработки сигналов и/или систематический количественный контроль передающих катушек (18) и/или улавливающих катушек (15) и/или вместо передающих катушек и/или улавливающих катушек устанавливают калибровочный эталон (96) с тем, чтобы осуществить калибровку блока обработки сигналов.
7. Способ по п.6, отличающийся тем, что систематический контроль функций обработки сигналов блока (17, 19, 35, 37, 52, 60, 68, 74, 76, 78, 80, 88, 90, 94) обработки сигналов и/или систематический количественный контроль передающих катушек (18) и/или улавливающих катушек (15) осуществляют автоматически при каждом пуске блока обработки сигналов.
8. Способ по п.7, отличающийся тем, что калибровочный эталон (96) имеет по меньшей мере одно RC-звено, а блок (17, 19, 35, 37, 52, 60, 68, 74, 76, 78, 80, 88, 90, 94) обработки сигналов содержит регулируемый предварительный усилитель сигнала улавливающей катушки, причем предварительный усилитель проверяют благодаря тому, что на RC-звено подают фиксированное синусоидальное напряжение, амплитуду которого выбирают так, что при самой низкой чувствительности регулирования предварительного усилителя синусоидальный сигнал посредством каскада (80) аналого-цифровых преобразователей преобразуется с необходимой точностью в цифровую форму, вследствие чего при более высоком усилении предварительного усилителя синусоидальный сигнал перемодулируется, причем фактическую амплитуду сигнала определяют при более высокой чувствительности регулирования предварительного усилителя путем восстановления части сигнала улавливающей катушки, срезанной каскадом аналого-цифровых преобразователей.
9. Устройство для регистрации дефектов (23) в контролируемом образце (13), перемещаемом относительно данного устройства, при неразрушающем и бесконтактном контроле, имеющее
блок передающих катушек (18), содержащий по меньшей мере одну передающую катушку (18), предназначенную для намагничивания контролируемого образца периодическими переменными электромагнитными полями,
блок улавливающих катушек (15), содержащий по меньшей мере одну улавливающую катушку (12, 14, 15), предназначенную для регистрации периодического электрического сигнала, содержащего несущее колебание, при этом когда улавливающие катушки регистрируют дефект в контролируемом образце, наличие дефекта в контролируемом образце способствует формированию амплитуды и/или фазы сигнала,
каскад аналого-цифровых преобразователей, предназначенный для преобразования сигнала улавливающей катушки в цифровую форму,
блок (17, 19, 35, 37, 52, 60, 68, 74, 76, 78, 80, 88, 90, 94) обработки сигналов, предназначенный для формирования полезного сигнала из сигнала улавливающей катушки, преобразованного в цифровую форму, и
блок (50, 60, 64) обработки данных, предназначенный для обработки полезного сигнала с целью обнаружения дефекта в контролируемом образце,
отличающееся тем, что
предусмотрен блок обработки сигналов, посредством которого путем осуществления контроля формы кривой преобразованного в цифровую форму сигнала улавливающей катушки определяется перемодуляция каскада аналого-цифровых преобразователей сигналом улавливающей катушки, а затем путем математической аппроксимации преобразованного в цифровую форму сигнала улавливающей катушки восстанавливается часть сигнала, срезанная каскадом аналого-цифровых преобразователей.
10. Устройство по п.9, отличающееся тем, что оно выполнено в виде многоканального устройства, причем передающие катушки (18) и улавливающие катушки (15) в каждом случае содержат ряд катушек, каждая их которых предназначена для определенной измерительной частоты.
11. Устройство по любому из пп.9 или 10, отличающееся тем, что каскад аналого-цифровых преобразователей на входе имеет защиту от перенапряжения.
12. Устройство по любому из пп.9 или 10, отличающееся тем, что блок (62) самотестирования выполнен с возможностью осуществления автоматически или по внешнему запросу систематического количественного контроля функций обработки сигналов блока (17, 19, 35, 37, 52, 60, 68, 74, 76, 78, 80, 88, 90, 94) обработки сигналов и/или систематического количественного контроля передающих катушек (18) и/или улавливающих катушек (15), и/или для осуществления по внешнему запросу калибровки блока обработки сигналов посредством калибровочного эталона (96), устанавливаемого вместо передающих и/или улавливающих катушек.
13. Устройство по п.12, отличающееся тем, что блок (62) самотестирования выполнен с возможностью переключения блока (17, 19, 35, 37, 52, 60, 68, 74, 76, 78, 80, 88, 90, 94) обработки сигналов для осуществления контроля функций обработки сигналов, вследствие чего сигнал для передающих катушек (18) подан в виде периодического входного сигнала непосредственно в блок обработки сигналов, причем блок самотестирования систематически меняет входной сигнал.
14. Устройство по п.11, отличающееся тем, что блок (17, 19, 35, 37, 52, 60, 68, 74, 76, 78, 80, 88, 90, 94) обработки сигналов содержит усилители (17, 74) и частотные фильтры (19, 52, 78), причем блок самотестирования выполнен с возможностью путем изменения частоты и амплитуды сигнала для передающих катушек (18) проверять, находятся ли в пределах заданной спецификации измеренные усиление усилителей, предельные частоты и крутизна характеристик частотных фильтров, причем, если спецификация не выполнена, выдается соответствующий сигнал ошибки.
| WO 2006007826 A1, 26.01.2006 | |||
| US 6377040 B1, 23.04.2002; | |||
| Вилочный самоходный погрузчик | 1959 |
|
SU122075A1 |
| Способ сканирующего вихретокового контроля | 1987 |
|
SU1493942A1 |

