Изобретение относится к области разработки систем наведения (СН) ракет и может быть использовано в комплексах ПТУР и ЗУР.
Одной из задач, решаемых при разработке СН вращающихся по углу крена ракет, является повышение точности их наведения на цель.
Известен способ наведения вращающейся ракеты, реализованный в устройстве формирования релейных сигналов управления (патент RU №2184921, МПК7 F41G 7/00, F42B 15/01, 03.04.00), включающий формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной и горизонтальной плоскостях, модуляцию этих сигналов периодическими по углу крена ракеты сигналами, формирование сигнала линеаризации, синфазного с периодическими по углу крена сигналами, по условию n=3, причем 
где ω0 - частота сигнала линеаризации,  - частота вращения ракеты по крену, суммирование промодулированных сигналов управления и сигнала линеаризации, формирование релейного двухпозиционного сигнала посредством определения знака этой суммы, преобразование полученного релейного сигнала управления в отклонение рулевого органа.
- частота вращения ракеты по крену, суммирование промодулированных сигналов управления и сигнала линеаризации, формирование релейного двухпозиционного сигнала посредством определения знака этой суммы, преобразование полученного релейного сигнала управления в отклонение рулевого органа.
СН, реализующая этот способ (патент RU №2184921, МПК7 F41G 7/00, F42B 15/01, 03.04.00), включает источник излучения (ИИ) на пусковом устройстве, оптически связанный с ним приемник излучения (ПИ) на ракете, формирователи сигналов управления в вертикальной (ФСУВ) и в горизонтальной (ФСУГ) плоскостях, входы которых соединены с выходом ПИ, а выходы соединены с первыми входами соответственно первого и второго модуляторов, суммирующий усилитель (СУ), первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, гироскопический датчик угла крена γ ракеты (ГДУК), первый выход которого соединен со вторым входом первого модулятора, а второй выход соединен со вторым входом второго модулятора, причем сигналы с первого и второго выходов ГДУК являются релейными трехпозиционными, сдвинутыми относительно друг друга на угол π/2, формирователь сигнала линеаризации (ФСЛ), вход которого соединен со вторым выходом ГДУК, логическое устройство (ЛУ), вход которого соединен со вторым выходом ГДУК, третий модулятор, первый вход которого соединен с выходом ФСЛ, второй вход соединен с выходом ЛУ, а выход соединен с третьим входом СУ, двухпозиционный релейный элемент (РЭ), вход которого соединен с выходом СУ, а также привод рулевого органа (ПРО), вход которого соединен с выходом двухпозиционного РЭ.
Недостатком данного способа и СН является то, что реализуемое соотношение n частоты сигнала линеаризации ПРО (соответственно частоты формируемого одноканального релейного сигнала управления ПРО) и частоты вращения ракеты по крену постоянно и не зависит от изменения характеристик ракеты и ПРО в течение полетного времени. Сигнал управления ПРО в этой СН в течение всего полета ракеты формируется на утроенной частоте вращения по крену.
Наиболее близким к предлагаемому является способ наведения вращающейся ракеты с релейным ПРО (патент RU №2310151, МПК F41G 7/00 (2006.01), F42B 15/01 (2006.01), 20.12.05), включающий формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной и горизонтальной плоскостях, модуляцию этих сигналов периодическими по углу крена ракеты сигналами, формирование сигнала линеаризации, синфазного с периодическими по углу крена сигналами, по условию n=3 до момента включения маршевого двигателя ракеты и после его выключения, а во время работы маршевого двигателя по условию n=2, причем  ,
,
где ω0 - частота сигнала линеаризации, - частота вращения ракеты по крену, суммирование промодулированных сигналов управления и сигнала линеаризации, формирование релейного двухпозиционного сигнала посредством определения знака этой суммы, преобразование полученного релейного сигнала управления в отклонение рулевого органа.
СН, реализующая этот способ (патент RU №2310151, МПК F41G 7/00 (2006.01), F42B 15/01 (2006.01), 20.12.05), включает ИИ на пусковом устройстве, оптически связанный с ним ПИ, ФСУВ и ФСУГ, входы которых соединены с выходом ПИ, а выходы соединены с первыми входами соответственно первого и второго модуляторов, СУ, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, ГДУК, первый выход которого соединен со вторым входом первого модулятора, а второй выход соединен со вторым входом второго модулятора, входом ФСЛ, входом первого ЛУ и первым входом второго ЛУ, источник временного сигнала (ИВС), выход которого соединен со вторым входом второго ЛУ, третий модулятор, первый вход которого соединен с выходом ФСЛ, второй вход соединен с выходом первого ЛУ, третий вход соединен с выходом второго ЛУ, а выход соединен с третьим входом СУ, двухпозиционный РЭ, вход которого соединен с выходом СУ, а также ПРО, вход которого соединен с выходом двухпозиционного РЭ, причем сигналы с первого и второго выходов ГДУК являются релейными трехпозиционными, сдвинутыми относительно друг друга на угол π/2.
СН работает следующим образом. ПИ на ракете принимает модулированное излучение, формируемое ИИ на пусковом устройстве. Сигналы линейных рассогласований hy, hz между положением ракеты и осью луча с выходов ФСУВ и ФСУГ преобразуются из измерительной системы координат (СК), ориентированной относительно земли, во вращающуюся, связанную с ракетой, СК путем их модуляции релейными трехпозиционными, сдвинутыми относительно друг друга на угол π/2 сигналами С(γ), S(γ) с выходов ГДУК.
ФСЛ на основе информации с ГДУК реализует на каждом периоде вращения ракеты по углу крена пилообразный сигнал Uл вида (n=4):

где Ал - амплитуда сигнала Uл.
Первое ЛУ обеспечивает инверсию исходного сигнала линеаризации Uл на четверти оборота вращения ракеты по углу крена согласно зависимости:

Второе ЛУ, управляемое не только сигналом со второго выхода ГДУК, но и сигналом с выхода ИВС, формирует сигнал в соответствии с зависимостью:

где t1 - момент времени, связанный с включением маршевого двигателя (МД);
t2 - момент времени, связанный с выключением МД.
Скорректированный сигнал линеаризации Uл1=ijUл с выхода третьего модулятора имеет вид:
при t<t1 и t>t2 (условие n=3)

при t1≤t≤t2 (условие n=2):
После суммирования промодулированных рассогласований со скорректированным сигналом линеаризации на СУ и определения знака суммы двухпозиционным РЭ результирующий выходной сигнал управления
V=sign(hyC(γ)+hzS(γ)+Uл1),
поступающий на одноканальный релейный ПРО ракеты, является двухпозиционным релейным, обеспечивающим управление на основе широтно-импульсной модуляции (ШИМ). В течение времени t<t1 и t>t2 (на участках излета) этот сигнал формируется на утроенной частоте вращения ракеты по крену, а в течение времени t1≤t≤t2 (на участке работы МД) - на удвоенной.
ПРО осуществляет отработку этого сигнала, т.е. перекладку рулей в соответствии с изменением его знака. Вращающаяся по углу крена ракета демодулирует отклонение рулей δ, в результате чего в каждой из плоскостей создается управляющий момент, соответствующий исходным линейным рассогласованиям hy, hz.
Известный способ и реализующая его СН применяются для ракет с высокой начальной скоростью и последующим включением МД на среднем участке полета. Этот способ наиболее эффективен при низком быстродействии ПРО, поскольку формирование сигнала линеаризации по условию n=2 и n=3 не приводит к ухудшению точности, которое может возникать при n>3 из-за искажений релейного сигнала управления при его отработке ПРО.
Если же быстродействие ПРО позволяет отрабатывать сигнал управления без искажений при n>3, то целесообразно формировать управляющий сигнал на более высокой частоте (например, по условию n=4) для уменьшения амплитуды методических помех в колебательной составляющей углов атаки и скольжения ракеты, что объясняется следующим.
В сигнале управления ПРО помимо полезной (несущей информацию об отклонениях ракеты от оси луча) составляющей на частоте вращения ракеты по углу крена содержатся (из-за релейности сигнала) высшие гармоники частоты вращения, являющиеся методическими помехами. С точки зрения динамических свойств, планер ракеты представляется передаточной функцией колебательного звена с постоянной времени, обратно пропорциональной частоте собственных колебаний ракеты (А.А.Лебедев, В.А.Карабанов. «Динамика систем управления беспилотными летательными аппаратами». М.: «Машиностроение», 1965, с.113, зависимость 2.124, с.108, зависимость 2.93), т.е. является фильтром, подавляющим частоты, превышающие частоту собственных колебаний ракеты, в том числе частоту ω0.
Эти методические помехи, не будучи полностью подавлены планером, присутствуют в углах атаки и скольжения в виде высокочастотных колебаний, амплитуда которых уменьшается при увеличении частоты сигнала управления (параметра n).
Недостатком данного способа и СН является то, что при формировании сигнала линеаризации по условиям n=2 и n=3 на отдельных участках полета ракеты возможно увеличение амплитуды колебательных составляющих ее углов атаки и скольжения, ухудшающее условия поражения целей и в некоторой степени снижающее продольную скорость ракеты вследствие возрастания лобового сопротивления.
Формирование управляющего сигнала на более высокой частоте, например, по условию n=4 (с целью уменьшения амплитуды методических помех) может также не являться оптимальным на всем участке полета, а допустимо лишь на тех участках, где ПРО отрабатывает такой сигнал без искажений. Условием правильной отработки сигнала ПРО является то, что его фазовое запаздывание φ, определяемое по зависимости
 ,
,
где τ - время запаздывания ПРО, не превосходит некое пороговое значение.
Фазовое запаздывание ПРО может быть практически постоянным на протяжении всего полета (как указано в описании ближайшего аналога) или переменным в случае, если частота вращения ракеты по крену не пропорциональна ее продольной скорости.
Задачей предлагаемого изобретения является обеспечение в течение всего полета высокой точности наведения одноканальной вращающейся ракеты с релейным двухпозиционным ПРО, фазовое запаздывание которого существенно переменно, при одновременной минимизации амплитуды колебательных составляющих ее углов атаки и скольжения.
Для решения поставленной задачи на различных участках полета необходимо формирование вида сигнала линеаризации (соответственно релейного сигнала управления) с таким соотношением n, при котором оптимально линеаризуется ПРО с точки зрения его работы с минимальными искажениями и снижается влияние методических помех на качество процессов наведения.
Поставленная задача решается за счет того, что по сравнению с известным способом наведения вращающейся ракеты с релейным ПРО, включающим формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной и горизонтальной плоскостях, модуляцию этих сигналов периодическими по углу крена ракеты релейными трехпозиционными сигналами С(γ) и S(γ), сдвинутыми относительно друг друга на угол π/2, формирование сигнала линеаризации, синфазного с периодическими по углу крена сигналами, суммирование промодулированных сигналов управления и сигнала линеаризации, формирование релейного двухпозиционного сигнала посредством определения знака этой суммы и преобразование полученного релейного сигнала управления в отклонение рулевого органа, в предлагаемом способе сигнал линеаризации формируют по условию n=2, причем ,
где ω0 - частота сигнала линеаризации, - частота вращения ракеты по крену, в случае, если
 ,
,
где τ - время запаздывания привода рулевого органа, и по условию n=4 в случае, если

при этом момент времени t0 изменения значения n с условия n=2 на условие n=4 устанавливают по зависимости

или в ближайший после времени t0 момент времени  , соответствующий переключению сигнала С(γ) с отрицательного уровня на нулевой уровень.
, соответствующий переключению сигнала С(γ) с отрицательного уровня на нулевой уровень.
Этот момент времени  определяется по зависимости
определяется по зависимости

где  - период вращения ракеты по углу крена,
- период вращения ракеты по углу крена,
при указанном переключении сигнала С(γ).
Сущность способа заключается в том, что изменение вида сигнала линеаризации производят по времени или не только по времени, но и по углу крена, причем момент переключения устанавливают таким образом, чтобы на половине периода вращения ракеты однократно реализовывалась дополнительная команда вверх, что обеспечивается переключением при переходе сигнала С(γ) с отрицательного уровня на нулевой уровень. Фактически на этой половине периода сигнал линеаризации соответствует условию n=3, описанному в ближайшем аналоге. Реализация дополнительной команды вверх является приоритетной, поскольку ракета летит в условиях близости подстилающей поверхности.
При произвольной фазе переключения может возникать сбой в команде управления случайного характера, а в случае переключения по другим фронтам сигнала С(γ) дополнительная команда будет реализовываться вниз, вправо или влево (что менее предпочтительно, чем вверх).
В СН, реализующую предлагаемый способ, включающую ИИ на пусковом устройстве, оптически связанный с ним ПИ, формирователи сигналов управления в вертикальной ФСУВ и горизонтальной ФСУГ плоскостях, входы которых соединены с выходом ПИ, а выходы соединены с первыми входами соответственно первого и второго модуляторов, СУ, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, ГДУК, первый выход которого соединен со вторым входом первого модулятора, а второй выход соединен со вторым входом второго модулятора, входом ФСЛ и первым входом ЛУ, причем сигналы с первого и второго выходов ГДУК являются релейными трехпозиционными, сдвинутыми относительно друг друга на угол π/2, третий модулятор, первый вход которого соединен с выходом ФСЛ, второй вход соединен с выходом ЛУ, а выход соединен с третьим входом СУ, двухпозиционный РЭ, вход которого соединен с выходом СУ, ПРО, вход которого соединен с выходом двухпозиционного РЭ, а также ИВС, введены инвертирующий усилитель (ИУ), вход которого соединен со вторым выходом ГДУК, второй СУ, первый вход которого соединен с первым выходом ГДУК, а второй вход соединен с выходом ИУ, логический инвертор (ЛИ), вход которого соединен с выходом ИВС, RS-триггер, синхронизируемый фронтом, первый S-вход которого соединен с выходом ИВС, второй R-вход соединен с выходом ЛИ, третий С-вход синхронизации соединен с выходом второго СУ, а выход соединен со вторым входом ЛУ.
Предлагаемое изобретение поясняется графическим материалом.
Структура предлагаемой СН приведена на фиг.1, где 1 - ИИ, 2 - ПИ, 3 - ФСУВ, 4 - ФСУГ, 5 - первый модулятор (M1), 6 - второй модулятор (М2), 7 - первый СУ (СУ1), 8 - ГДУК, 9 - ФСЛ, 10 - ИУ, 11 - третий модулятор (М3), 12 - двухпозиционный РЭ, 13 - релейный ПРО, 14 - ЛУ, 15 - ИВС, 16 - второй СУ (СУ2), 17 - ЛИ, 18 - RS-триггер (Т), синхронизируемый фронтом.
На фиг.2 представлены сигналы с выходов элементов предлагаемой СН, поясняющие ее работу.
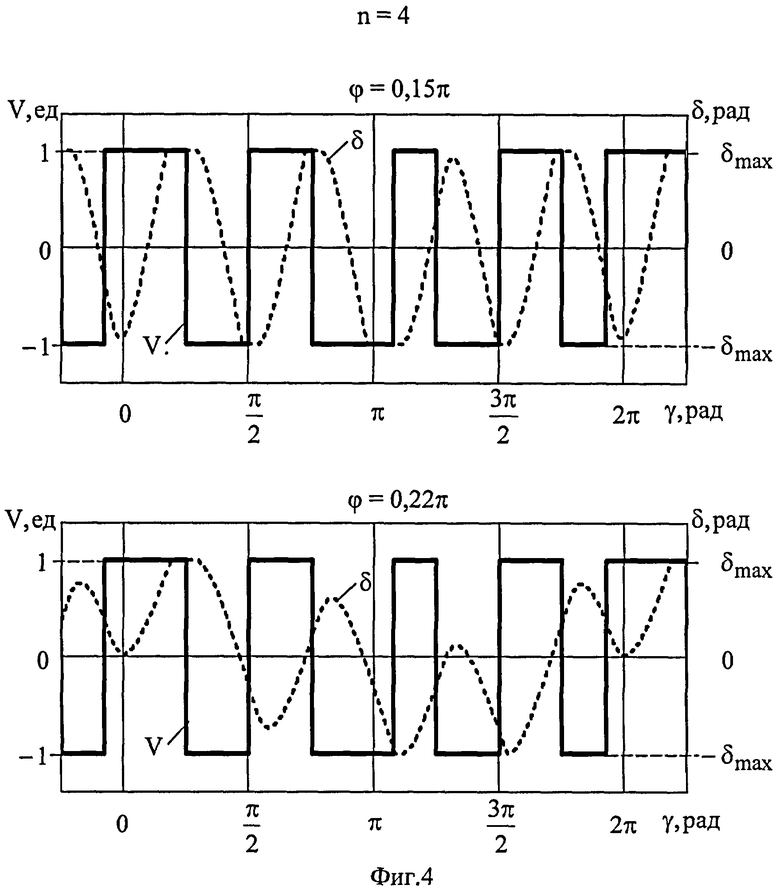
Входной релейный сигнал управления ПРО V и его выходной сигнал δ в предлагаемой СН при значениях фазового запаздывания 0,15π (27°) и 0,22π (40°) представлены на фиг.3 для условия n=2 и на фиг.4 для условия n=4 (на обоих чертежах при величинах команд hy/Ал=0,3; hz/Aл=0).
На фиг.5 представлены возможные зависимости частоты вращения по крену, временного и фазового запаздывания ПРО от полетного времени t, а также реализуемого соотношения n для предлагаемого способа наведения.
Предлагаемая СН (фиг.1) работает следующим образом.
ПИ 2 на ракете принимает модулированное излучение, формируемое ИИ 1 на пусковом устройстве. Сигналы линейных рассогласований hy, hz между положением ракеты и осью луча с выходов ФСУВ 3 и ФСУГ 4 преобразуются из измерительной СК, ориентированной относительно земли, во вращающуюся, связанную с ракетой СК путем их модуляции на модуляторах 5, 6 релейными трехпозиционными, сдвинутыми относительно друг друга на угол π/2 сигналами С(γ), S(γ) с выходов ГДУК 8.
Сигнал с выхода ИВС 15 jИВС (фиг.2) в момент времени t0, априорно установленный по зависимости (1), переключается с логического уровня «0» на логический уровень «1», а по окончании времени функционирования (оно устанавливается в аппаратуре равным максимально возможному полетному времени ракеты) устанавливается в «0».
Этот сигнал поступает на первый S-вход RS-триггера 18, а на второй R-вход RS-триггера 18 поступает этот же сигнал, логически проинвертированный на ЛИ 17 (сигнал jЛИ на фиг.2).
На третий С-вход RS-триггера 18 поступает двухуровневый сигнал синхронизации, передний фронт которого совпадает с переключением сигнала С(γ) с ГДУК 8 с отрицательного уровня на нулевой уровень. Сигнал синхронизации jСУ2 получен как разность сигналов С(γ) и S(γ) с выходов ГДУК 8 с помощью СУ2 16 и ИУ 10. Для того чтобы уровни сигнала с выхода СУ2 16 составляли «0» и «1», на этом сумматоре производится дополнительное суммирование указанной разности с сигналом, равным «1», и нормировка его с коэффициентом 0,5.
Сигнал jT с выхода RS-триггера 18 (фиг.2) равен «0» до момента времени и «1» после этого момента:

т.е. однократное переключение триггера происходит после времени t0 в соответствии с зависимостью (2) при ближайшем переднем фронте сигнала синхронизации. По окончании работы аппаратуры выходной сигнал RS-триггера 18 возвращается в исходное положение (поскольку происходит изменение сигнала на его S-входе и R-входе), что обеспечивает возможность многократного пуска аппаратуры.
ФСЛ 9 на основе информации с ГДУК 8 реализует на каждом периоде вращения ракеты по углу крена пилообразный сигнал Uл вида (условие n=2):
Выходной сигнал jЛУ ЛУ 14 (фиг.2) формируется согласно зависимости:

Сигнал jЛУ при  обеспечивает инверсию исходного сигнала линеаризации Uл на 2-х четвертях оборота вращения ракеты по углу крена, а при
обеспечивает инверсию исходного сигнала линеаризации Uл на 2-х четвертях оборота вращения ракеты по углу крена, а при  оставляет сигнал линеаризации без изменения.
оставляет сигнал линеаризации без изменения.
В результате скорректированный сигнал линеаризации Uл1=jЛУ Uл с выхода третьего модулятора 11 (фиг.2) имеет вид:
при  (условие n=2)
(условие n=2)

при  (условие n=4)
(условие n=4)

После суммирования промодулированных рассогласований со скорректированным сигналом линеаризации на первом СУ 7 и определения знака суммы двухпозиционным РЭ 12 результирующий выходной сигнал
V=sign(hyC(γ)+hzS(γ)+Uл1),
поступающий на одноканальный релейный ПРО 13 ракеты, является двухпозиционным релейным, обеспечивающим управление на основе ШИМ и в течение времени  формируется на удвоенной частоте вращения ракеты по крену, а в течение времени
формируется на удвоенной частоте вращения ракеты по крену, а в течение времени  - на учетверенной.
- на учетверенной.
ПРО 13 осуществляет отработку этого сигнала, т.е. перекладку рулей в соответствии с изменением его знака. Вращающаяся по углу крена ракета демодулирует отклонение рулей δ, в результате чего в каждой из плоскостей создается управляющий момент, соответствующий исходным линейным рассогласованиям hy, hz и возвращающий ракету к оси луча.
Представленные на фиг.3, 4 выходные сигналы ПРО δ свидетельствуют, что для условия n=2 входной сигнал управления ПРО V отрабатывается без искажений как при значениях фазового запаздывания 0,15π (27°), так и 0,22π (40°). Для условия n=4 при значении фазового запаздывания 0,22π (40°) возникают амплитудные и фазовые искажения выходного сигнала ПРО, неизбежно ухудшающие точность наведения. Исходя из этого установлено пороговое значение (0,17…0,20)π или 31…36°, по достижении которого производят переключение с условия n=2 на условие n=4 (или с условия n=4 на условие n=2) согласно зависимости (1).
На фиг.5 приведены типовые характеристики ракеты с начальной закруткой по углу крена: ее частота вращения по крену, временное τ и фазовое φ запаздывание ПРО от полетного времени t, а также реализуемое согласно предложенному способу соотношение n. Как видно, фазовое запаздывание ПРО постоянно лишь начиная с некоторого момента времени, а до этого момента оно существенно переменно и больше (в той степени, насколько частота вращения больше ее аэродинамической составляющей). Для ракет с такими характеристиками соотношение n изменяется со значения 2 на значение 4 приблизительно на 1,5 с полета.
В качестве RS-триггера и логического инвертора могут быть использованы схемы, представленные в книге У.Титце, К.Шенк. «Полупроводниковая схемотехника». - М.: "Мир", 1983, с.117,107.
В качестве остальных элементов СН могут быть использованы устройства, представленные в ближайшем аналоге.
Преимуществом предлагаемого способа и реализующей его СН является повышение точности наведения ракет с релейным ПРО с переменным фазовым запаздыванием (например, в ракетах со стартовой закруткой на начальном участке полета оно больше, чем на последующем) за счет формирования команд управления, оптимальных в течение всего времени полета, а именно на удвоенной частоте вращения ракеты по крену, когда фазовое запаздывание ПРО больше заданного порогового значения, и на учетверенной частоте вращения, когда фазовое запаздывание ПРО меньше порогового значения.
Качество наведения повышается посредством:
- улучшения условия работы ПРО при его большом фазовом запаздывании за счет уменьшения количества переключений уровней релейного сигнала управления на периоде вращения, сформированного на более низкой - удвоенной - частоте вращения по крену;
- уменьшение амплитуды колебательных составляющих углов атаки и скольжения на других участках полета за счет формирования сигнала на более высокой - учетверенной - частоте вращения по крену.
Применение предлагаемого способа и СН позволяет обеспечить высокую точность наведения вращающихся по углу крена одноканальных ракет с релейными ПРО с переменным фазовым запаздыванием.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486428C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2527391C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2006 |
|
RU2321814C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДЫ УПРАВЛЕНИЯ ОДНОКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2473864C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2548687C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА (ВАРИАНТЫ) | 2006 |
|
RU2326323C2 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2006 |
|
RU2326325C1 |



Изобретение относится к области разработки систем наведения (СН) ракет. Технический результат - повышение точности наведения одноканальной вращающейся ракеты с релейным двухпозиционным приводом рулевого органа (ПРО). Способ включает формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной и горизонтальной плоскостях. Осуществляют модуляцию этих сигналов периодическими по углу (γ) крена ракеты релейными трехпозиционными сигналами С(γ) и S(γ), сдвинутыми относительно друг друга на угол π/2. Осуществляют формирование сигнала линеаризации, синфазного с периодическими по углу крена сигналами, в зависимости от  где ω0 - частота сигнала линеаризации, - частота вращения ракеты по крену. Осуществляют суммирование промодулированных сигналов управления и сигнала линеаризации, формирование релейного двухпозиционного сигнала посредством определения знака этой суммы и преобразование полученного релейного сигнала управления в отклонение ПРО. При этом сигнал линеаризации формируют по условию n=2 или n=4 в зависимости от величины произведения времени запаздывания ПРО на γ. 2 н.п. ф-лы, 5 ил.
где ω0 - частота сигнала линеаризации, - частота вращения ракеты по крену. Осуществляют суммирование промодулированных сигналов управления и сигнала линеаризации, формирование релейного двухпозиционного сигнала посредством определения знака этой суммы и преобразование полученного релейного сигнала управления в отклонение ПРО. При этом сигнал линеаризации формируют по условию n=2 или n=4 в зависимости от величины произведения времени запаздывания ПРО на γ. 2 н.п. ф-лы, 5 ил.
1. Способ наведения вращающейся ракеты с релейным приводом рулевого органа, включающий формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной и горизонтальной плоскостях, модуляцию этих сигналов периодическими по углу крена ракеты релейными трехпозиционными сигналами С(γ) и S(γ), сдвинутыми друг относительно друга на угол π/2, формирование сигнала линеаризации, синфазного с периодическими по углу крена сигналами, суммирование промодулированных сигналов управления и сигнала линеаризации, формирование релейного двухпозиционного сигнала посредством определения знака этой суммы и преобразование полученного релейного сигнала управления в отклонение рулевого органа, отличающийся тем, что сигнал линеаризации формируют по условию n=2, причем  где ω - частота сигнала линеаризации,
где ω - частота сигнала линеаризации,  - частота вращения ракеты по крену, в случае, если
- частота вращения ракеты по крену, в случае, если

где τ - время запаздывания привода рулевого органа, и по условию n=4 в случае, если

при этом моменты времени t0 изменения значения n с условия n=2 на условие n=4 устанавливают по зависимости  или в ближайший момент времени после времени t0, соответствующий переключению сигнала С(γ) с отрицательного уровня на нулевой уровень.
или в ближайший момент времени после времени t0, соответствующий переключению сигнала С(γ) с отрицательного уровня на нулевой уровень.
2. Система наведения вращающейся ракеты с релейным приводом рулевого органа, включающая источник излучения на пусковом устройстве, оптически связанный с ним приемник излучения, формирователи сигналов управления в вертикальной и горизонтальной плоскостях, входы которых соединены с выходом приемника излучения, а выходы соединены с первыми входами соответственно первого и второго модуляторов, суммирующий усилитель, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, гироскопический датчик угла крена, первый выход которого соединен со вторым входом первого модулятора, а второй выход соединен со вторым входом второго модулятора, входом формирователя сигнала линеаризации и первым входом логического устройства, причем сигналы с первого и второго выходов гироскопического датчика угла крена являются релейными трехпозиционными, сдвинутыми друг относительно друга на угол π/2, третий модулятор, первый вход которого соединен с выходом формирователя сигнала линеаризации, второй вход соединен с выходом логического устройства, а выход соединен с третьим входом суммирующего усилителя, двухпозиционный релейный элемент, вход которого соединен с выходом суммирующего усилителя, привод рулевого органа, вход которого соединен с выходом двухпозиционного релейного элемента, а также источник временного сигнала, отличающаяся тем, что в нее введены инвертирующий усилитель, вход которого соединен со вторым выходом гироскопического датчика угла крена, второй суммирующий усилитель, первый вход которого соединен с первым выходом гироскопического датчика угла крена, а второй вход соединен с выходом инвертирующего усилителя, логический инвертор, вход которого соединен с выходом источника временного сигнала, RS-триггер, синхронизируемый фронтом, первый S-вход которого соединен с выходом источника временного сигнала, второй R-вход соединен с выходом логического инвертора, третий С-вход синхронизации соединен с выходом второго суммирующего усилителя, а выход соединен со вторым входом логического устройства.
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| US 5248114 A, 28.09.1993 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
| EP 0529796 A1, 03.03.1993. | |||

