Изобретение относится к области разработки систем наведения ракет и может быть использовано в комплексах ПТУР и ЗУР.
Одной из задач, решаемых при разработке систем управления вращающимися по углу крена ракетами, является увеличение надежности функционирования за счет упрощения механических элементов ракеты без ухудшения точности наведения. Известно устройство для управления вращающейся ракетой (/1/, с.237-238, рис. 7.16), в котором с осью наружной рамки гироскопа угла крена, направленной по продольной оси ракеты, связываются роторы двух синусно-косинусных вращающихся трансформаторов (СКВТ). Так как гироскоп крена является свободным астатическим гироскопом, угол поворота статора относительно ротора СКВТ равен углу крена γ ракеты, отсчитываемого от вертикального направления. Оси однофазных обмоток, уложенных на роторах, взаимно перпендикулярны. Напротив, соответственные обмотки статоров параллельны. К роторам СКВТ подводятся напряжения, величина и фаза которых зависят соответственно от величины и знака линейных рассогласований в вертикальной hy (в источнике информации h2) и горизонтальной hz (в источнике информации h1) плоскостях. Таким образом, осуществляется модуляция сигналов линейных рассогласований гармоническими сигналами частотой вращения ракеты по крену, сдвинутыми относительно друг друга на угол π/2:
Uy=hycosγ,
Uz=hzsinγ.
Указанная модуляция преобразует сигналы управления из измерительной системы координат, ориентированной относительно земли, во вращающуюся, связанную с ракетой, систему координат. Полученные сигналы поступают на обмотки управления рулевого привода (РП).
В одноканальных ракетах (/1/, с.260-261), имеющих одну пару исполнительных органов (рулей), одноканальный сигнал управления на РП формируется в соответствии с зависимостью:
V = k(hycosγ+hzsinγ),
где k - коэффициент передачи.
Недостатком данного устройства является относительная сложность его электромеханических элементов - СКВТ, обеспечивающих реализацию гармонических сигналов.
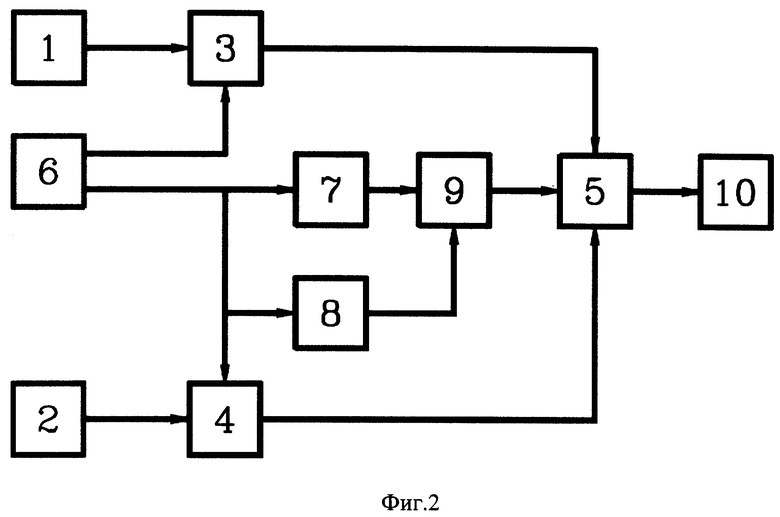
Наиболее близким к предлагаемому является устройство, в котором СКВТ с целью упрощения аппаратуры заменяются стабилизированным при помощи гироскопа крена коллектором (/1/, с.269, рис.7.32). Токосъемники, вращающиеся относительно коллектора вместе с ракетой, периодически контактируют с изолированными относительно друг друга проводящими ламелями, так что на вход вращающегося вместе с ракетой РП поступают амплитудно-модулированные прямоугольные колебания. Вид модулирующих функций c(γ),s(γ) приведен на фиг.1.
Одноканальный сигнал управления в этом устройстве формируется в соответствии с зависимостью:
V = k(hyc(γ)+hzs(γ)).
Таким образом, известное устройство формирования сигналов управления вращающейся одноканальной ракетой включает формирователи команд управления в вертикальной и горизонтальной плоскостях, выходы которых соединены соответственно с первыми входами первого и второго модуляторов, суммирующий усилитель, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, гироскопический датчик угла γ крена ракеты, первый выход которого соединен со вторым входом первого модулятора, а второй выход соединен со вторым входом второго модулятора, причем сигналы с первого и второго выходов гироскопического датчика угла крена являются релейными трехпозиционными, сдвинутыми относительно друг друга на угол π/2. Далее сигнал управления с суммирующего усилителя поступает на одноканальный рулевой привод ракеты.
Недостатком данного устройства, работающего на основе амплитудной модуляции сигналов, является необходимость применения в ракете пропорционального РП, при использовании которого отклонения рулей пропорциональны управляющему сигналу. Поскольку пропорциональный РП является достаточно сложным электромеханическим устройством, широкое распространение получили релейные двухпозиционные РП, являющиеся наиболее простыми. Для управления ракетой с релейным РП невозможно без потери точности наведения применение рассмотренного устройства, формирующего амплитудно-модулированный сигнал управления, вследствие больших погрешностей отработки такого сигнала релейным РП.
Задачей предлагаемого изобретения является обеспечение высокой точности наведения при использовании в одноканальной вращающейся ракете релейного двухпозиционного РП.
Для достижения поставленной задачи необходимо:
- обеспечить пропорциональность величины команд управления и отклонений рулей одноканального релейного РП в каждой из плоскостей исходным командам управления в измерительной системе координат;
- обеспечить в вертикальной плоскости охват максимально возможного диапазона команд управления вверх и ограничение команд вниз.
Поставленные задачи решаются посредством суммирования сигнала управления с периодическим сигналом линеаризации и определения знака суммы, причем генерируется такой вид сигнала линеаризации, который обеспечивает максимально возможные команды вверх и ограниченные команды вниз. Это необходимо для управления ракетами с дефицитом располагаемой перегрузки, поскольку в вертикальной плоскости ракета должна развивать ускорение, компенсирующее кинематическое ускорение от силы тяжести. Под располагаемой перегрузкой ракеты понимается наибольшая перегрузка (ускорение) ракеты, которую она может развить при максимальном отклонении рулей (/3/, с. 126).
Поставленная задача достигается за счет того, что в известное устройство вводятся элементы (формирователь исходного сигнала линеаризации, логическое устройство, третий модулятор), обеспечивающие формирование скорректированного сигнала линеаризации Uл1, синфазного с модулирующими сигналами c(γ),s(γ), подаваемого на третий вход суммирующего усилителя, а также двухпозиционный релейный элемент (компаратор), вход которого соединен с выходом суммирующего усилителя. Формирователь исходного сигнала линеаризации реализует на каждом периоде вращения ракеты по углу крена пилообразный сигнал Uл вида: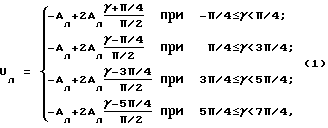
где Ал - амплитуда сигнала Uл.
С целью обеспечения максимальных команд вверх логическое устройство осуществляет преобразование (коррекцию) исходного линеаризующего сигнала согласно зависимости: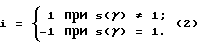
В результате перемножения на третьем модуляторе исходного сигнала линеаризации и сигнала с выхода логического устройства скорректированный сигнал линеаризации Uл1=i Uл с выхода третьего модулятора будет иметь вид: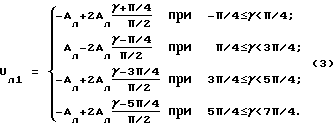
Вид сигналов c(γ),s(γ), Uл, i, Uл1 приведен на фиг.1.
После суммирования скорректированного сигнала линеаризации с промодулированными сигналами линейных рассогласований hy, hz полученная сумма подается на двухпозиционный релейный элемент (компаратор), осуществляющий функцию определения знака сигнала, т.е.
V = sign(hyc(γ)+hzs(γ)+Uл1). (4)
Таким образом, результирующий одноканальный сигнал управления, поступающий на одноканальный релейный рулевой привод ракеты, является двухпозиционным релейным, обеспечивающим управление на основе широтно-импульсной модуляции (ШИМ), при которой информация о величине команд заключена в соотношении длительностей верхнего и нижнего уровней сигнала, соответствующих положению рулей ракеты на одном или другом упоре. Коэффициент усиления в таком устройстве обратно пропорционален амплитуде Ад сигнала линеаризации.
Структура предлагаемого устройства пояснена на фиг.2, где представлены формирователи сигналов управления в вертикальной 1 и горизонтальной 2 плоскостях, выходы которых соединены соответственно с первыми входами первого 3 и второго 4 модуляторов, суммирующий усилитель 5, первый и второй входы которого соединены соответственно с выходами первого 3 и второго 4 модуляторов, гироскопический датчик угла крена 6 ракеты, первый выход которого соединен со вторым входом первого модулятора 3, а второй выход соединен со вторым входом второго модулятора 4, причем сигналы с первого и второго выходов гироскопического датчика угла крена 6 являются релейными трехпозиционными, сдвинутыми относительно друг друга на угол π/2, формирователь сигнала линеаризации 7, вход которого соединен со вторым выходом гироскопического датчика угла крена 6, логическое устройство 8, вход которого соединен со вторым выходом гироскопического датчика угла крена 6, третий модулятор 9, первый вход которого соединен с выходом формирователя сигнала линеаризации 7, второй вход соединен с выходом логического устройства 8, а выход соединен с третьим входом суммирующего усилителя 5, а также двухпозиционный релейный элемент (компаратор) 10, вход которого соединен с выходом суммирующего усилителя.
Устройство работает следующим образом.
Сигналы линейных рассогласований hy, hz с выходов формирователей сигналов управления в вертикальной 1 и горизонтальной 2 плоскостях перемножаются на модуляторах соответственно 3 и 4 с сигналами c(γ),s(γ) с выходов гироскопического датчика угла крена 6, являющимися релейными трехпозиционными, сдвинутыми относительно друг друга на угол π/2.
На основе информации с гироскопического датчика угла крена 6 формирователь сигнала линеаризации 7 вырабатывает исходный периодический сигнал Uл по зависимости (1).
Логическое устройство 8 в соответствии с зависимостью (2) осуществляет коррекцию, а именно инверсию исходного сигнала линеаризации uл на четверти оборота вращения ракеты по углу крена, в результате чего скорректированный сигнал линеаризации Uл1 с выхода третьего модулятора 9 имеет вид согласно зависимости (3).
После суммирования промодулированных рассогласований со скорректированным сигналом линеаризации на суммирующем усилителе 5 и определения знака суммы двухпозиционным релейным элементом 10 выходной релейный сигнал имеет вид согласно зависимости (4).
В качестве формирователей сигналов управления может быть использовано устройство, включающее радиолокационную станцию и приемник ракеты, представленное в /1/ на с. 221.
В качестве суммирующего усилителя, модулятора, формирователя сигнала линеаризации, логического устройства и компаратора могут быть использованы схемы, представленные в /2/ соответственно на с. 24, 53, 95, 114, 112.
В качестве датчика гироскопа угла крена может быть использовано устройство, представленное в /1/ на с. 269.
Для оценки эффективности предлагаемого устройства рассмотрим принцип формирования выходного сигнала в зависимости от величин сигналов команд управления.
Комплексная амплитуда  первой гармоники разложения в ряд Фурье сформированного по зависимости (4) выходного сигнала V определяется выражением:
первой гармоники разложения в ряд Фурье сформированного по зависимости (4) выходного сигнала V определяется выражением:
где 
V1 y,z - проекции комплексной амплитуды  на оси декартовой системы координат.
на оси декартовой системы координат.
Модуль  комплексной амплитуды
комплексной амплитуды  определяется как:
определяется как: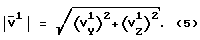
В соответствии с разложением в ряд Фурье величины V1 y,z имеют вид:
 (7)
(7)
где
Анализ зависимостей (5)-(8) показывает, что проекции V1 y,z (результирующие команды управления в вертикальной и горизонтальной плоскостях) пропорциональны синусу линейных рассогласований hy,z в диапазоне изменения его аргумента ±π/4, где синусоидальный закон слабо отличается от линейного. Дополнительное приращение вверх вертикальной команды
возникающее за счет реализации в предлагаемом устройстве указанного вида сигнала линеаризации Uл1, а именно коррекции логическим устройством исходного сигнала линеаризации Uл, тем больше, чем меньше абсолютная величина исходной горизонтальной команды kz.
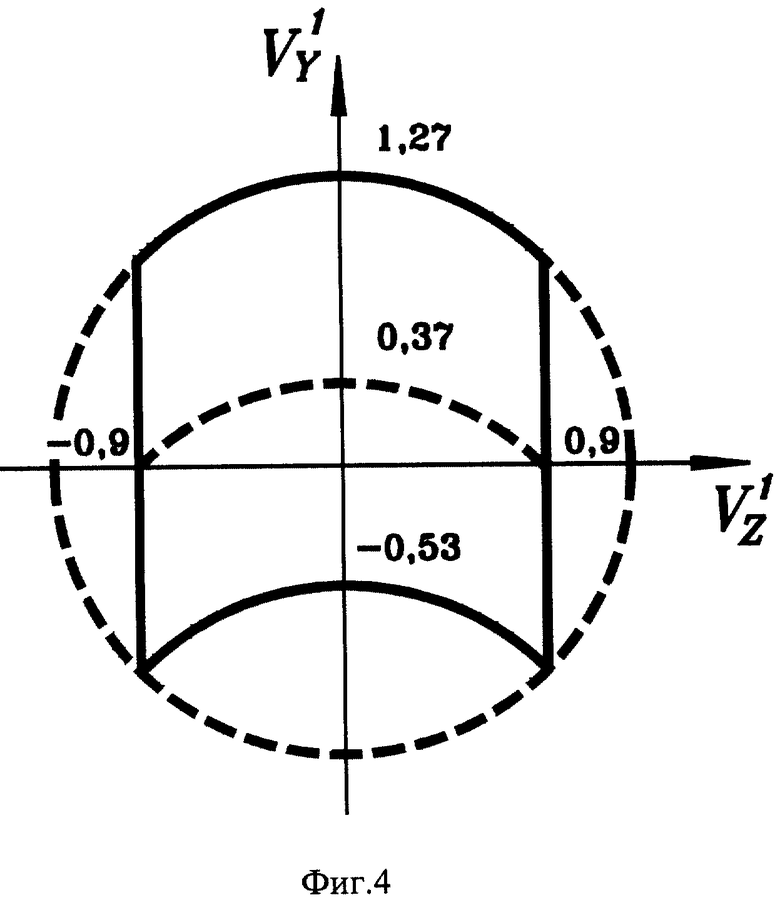
Реализуемое предлагаемым устройством поле команд управления представляет собой область возможных значений вектора  комплексной амплитуды первой гармоники. Границы этой области изображены на фиг.4 сплошной линией. Максимально возможное значение модуля комплексной амплитуды первой гармоники выходного сигнала
комплексной амплитуды первой гармоники. Границы этой области изображены на фиг.4 сплошной линией. Максимально возможное значение модуля комплексной амплитуды первой гармоники выходного сигнала  изображено на фиг.4 внешней штриховой окружностью. Верхняя граница поля команд управления на фиг.4 соответствует значению вертикальной команды ky= 1 при изменении значений горизонтальной команды |kz|≤1 и совпадает с этой окружностью, т.е. вверх обеспечивается максимально возможная команда. Нижняя граница поля на фиг.4 соответствует значению вертикальной команды ky=-1 при изменении значений горизонтальной команды |kz|≤1.. Боковые границы поля на фиг.4 соответствуют горизонтальным командам kz= -1 и kz=1 при изменении значений вертикальной команды |ky|≤1. Внутренняя штриховая дуга на фиг.4 соответствует значению вертикальной команды ky= 0 при изменении значений горизонтальной команды |kz|≤1 и полностью определяется приращением ΔV
изображено на фиг.4 внешней штриховой окружностью. Верхняя граница поля команд управления на фиг.4 соответствует значению вертикальной команды ky= 1 при изменении значений горизонтальной команды |kz|≤1 и совпадает с этой окружностью, т.е. вверх обеспечивается максимально возможная команда. Нижняя граница поля на фиг.4 соответствует значению вертикальной команды ky=-1 при изменении значений горизонтальной команды |kz|≤1.. Боковые границы поля на фиг.4 соответствуют горизонтальным командам kz= -1 и kz=1 при изменении значений вертикальной команды |ky|≤1. Внутренняя штриховая дуга на фиг.4 соответствует значению вертикальной команды ky= 0 при изменении значений горизонтальной команды |kz|≤1 и полностью определяется приращением ΔV
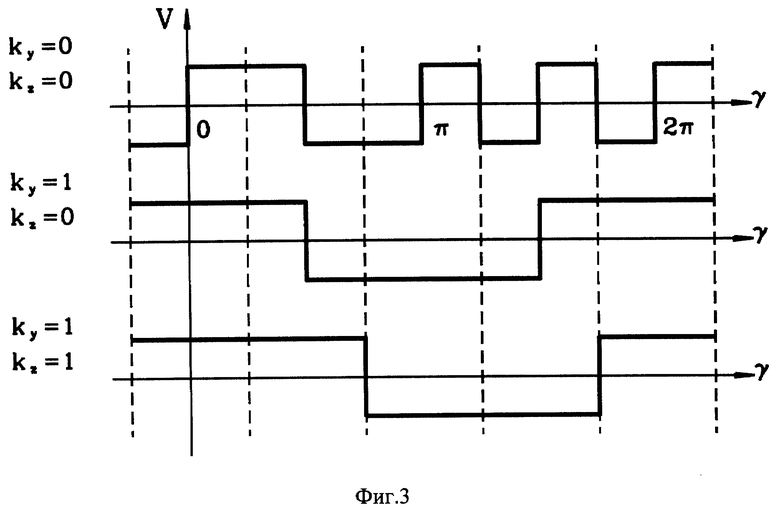
Сформированный предлагаемым устройством сигнал V поступает на одноканальный релейный РП, осуществляющий отработку этого сигнала, т.е. перекладку рулей в соответствии с изменением его знака. Вращающаяся по углу крена ракета демодулирует отклонение рулей, в результате чего в каждой из плоскостей создается управляющий момент, соответствующий исходным командам управления в измерительной системе координат (линейным рассогласованиям hy, hz). Обеспечение максимальных команд вверх осуществляется за счет максимально возможной длительности нахождения руля на упоре, соответствующей половине периода вращения ракеты по углу крена (см. фиг.3).
Преимуществами предлагаемого устройства являются:
- обеспечение высокой точности формирования команд за счет пропорциональности средней за период вращения по углу крена величины команды и отклонения рулей одноканального релейного РП в каждой из плоскостей исходным командам управления в измерительной системе координат;
- возможность обеспечения максимальных команд вверх в вертикальной плоскости, в которой на ракету действует кинематическое ускорение от силы тяжести, что позволяет обеспечить максимально возможную дальность полета ракеты;
- ограничение команд вниз, что снижает вероятность столкновения ракеты с подстилающей поверхностью в случае ее непосредственной близости (1,0-1,5 м) к линии визирования;
- пониженная чувствительность замкнутого контура управления к расфазировкам, вносимым элементами аппаратуры управления.
Таким образом, применение предлагаемого устройства позволяет повысить точность наведения вращающихся по углу крена одноканальных ракет с релейными приводами рулевых органов.
Сравнение заявляемого технического решения с прототипом позволило установить соответствие его критерию "новизна". При изучении других известных технических решений в данной области признаки, отличающие заявляемое изобретение от прототипа, не были выявлены и поэтому они обеспечивают заявляемому техническому решению соответствие критерию "существенные отличия".
Источники информации
1. Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет). М.: Высшая школа, 1976, с.221, 237, 238, 260, 261, 269.
2. Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для АВМ. - М.: Энергия, 1978, с.24, 53, 95, 112, 114.
3. Дмитриевский А.А. Внешняя баллистика. - М.: Машиностроение, 1979, с. 126.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2006 |
|
RU2321814C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА (ВАРИАНТЫ) | 2006 |
|
RU2326323C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373479C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486428C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2002 |
|
RU2235969C1 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ РАКЕТОЙ И РАКЕТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241949C2 |
Изобретение относится к области разработки систем наведения ракет и может быть использовано в комплексах ПТУР и ЗУР. Технический результат - повышение точности наведения вращающихся по углу крена ракет с релейными приводами рулевых органов. Устройство согласно изобретению содержит формирователи сигналов управления в вертикальной и горизонтальной плоскостях, выходы которых соединены соответственно с первыми входами первого и второго модуляторов, суммирующий усилитель, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов. Устройство также содержит гироскопический датчик угла крена ракеты, первый выход которого соединен со вторым входом первого модулятора, а второй выход соединен со вторым входом второго модулятора, причем сигналы с первого и второго выходов гироскопического датчика угла крена являются релейными трехпозиционными, сдвинутыми относительно друг друга на угол π/2. В устройство введены формирователь сигнала линеаризации, вход которого соединен со вторым выходом гироскопического датчика угла крена, логическое устройство, вход которого соединен со вторым выходом гироскопического датчика угла крена, третий модулятор, первый вход которого соединен с выходом формирователя сигнала линеаризации, второй вход соединен с выходом логического устройства, а выход соединен с третьим входом суммирующего усилителя, а также двухпозиционный релейный элемент (компаратор), вход которого соединен с выходом суммирующего усилителя. 4 ил.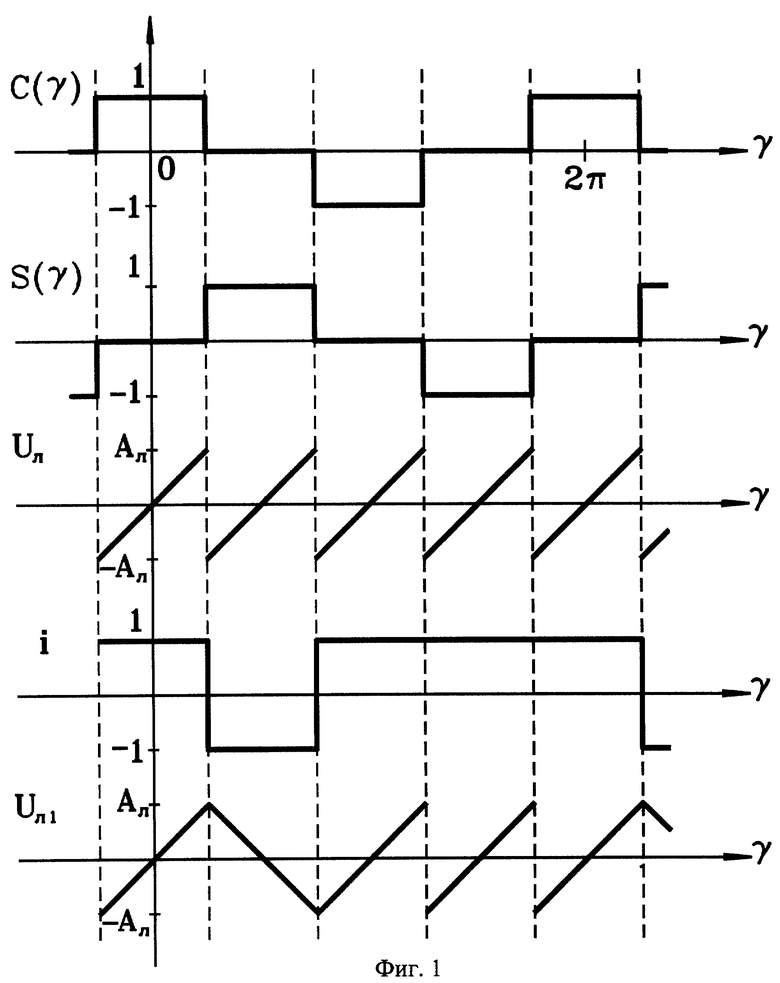
Устройство формирования релейных сигналов управления вращающейся по углу крена ракетой, включающее формирователи сигналов управления в вертикальной и горизонтальной плоскостях, выходы которых соединены соответственно с первыми входами первого и второго модуляторов, суммирующий усилитель, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, гироскопический датчик угла крена ракеты, первый выход которого соединен со вторым входом первого модулятора, а второй выход соединен со вторым входом второго модулятора, причем сигналы с первого и второго выходов гироскопического датчика угла крена являются релейными трехпозиционными, сдвинутыми друг относительно друга на угол π/2, отличающееся тем, что в него введены формирователь сигнала линеаризации, вход которого соединен со вторым выходом гироскопического датчика угла крена, логическое устройство, вход которого соединен со вторым выходом гироскопического датчика угла крена, третий модулятор, первый вход которого соединен с выходом формирователя сигнала линеаризации, второй вход соединен с выходом логического устройства, а выход соединен с третьим входом суммирующего усилителя, а также двухпозиционный релейный элемент, вход которого соединен с выходом суммирующего усилителя.
| КУЗОВКОВ Н.Т | |||
| Системы стабилизации летательных аппаратов (баллистических и зенитных ракет) | |||
| - М.: Высшая школа, 1976, с.269 | |||
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДЫ УПРАВЛЕНИЯ СНАРЯДОМ, РЕГУЛЯРНО ВРАЩАЮЩИМСЯ ПО УГЛУ КРЕНА С ПОМОЩЬЮ АЭРОДИНАМИЧЕСКИХ СИЛ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2131576C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ РАЗВИТИЯ МЕТАСТАЗОВ В ПЕЧЕНИ У БОЛЬНЫХ РАКОМ ТОЛСТОЙ КИШКИ | 2018 |
|
RU2686687C1 |
| US 5042742, 27.08.1991. | |||

