Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе управления подавлением вибрации для электроприводного транспортного средства и к способу подавления вибрации для него, применяемым к команде управления крутящим моментом электромотора, которые достижимы посредством управления с прямой связью (F/F) и управления с обратной связью (F/B). Электроприводное транспортное средство имеет электромотор в качестве источника мощности, расходуемой на движение.
Уровень техники
[0002] Традиционно, в транспортном средстве, приводимом в движение посредством электромотора, известна такая система управления подавлением вибрации для управления крутящим моментом мотора, в которой установившийся целевой крутящий момент определяется на основе различной информации касательно транспортного средства, первый целевой крутящий момент вычисляется посредством вычисления с прямой связью (в дальнейшем называемого F/F-оператором или вычислением), и второй целевой крутящий момент вычисляется на основе вычисления с обратной связью (в дальнейшем называемого F/B-оператором или вычислением), соответственно. Затем, посредством суммирования первого целевого крутящего момента и второго целевого крутящего момента получается команда крутящего момента мотора для управления крутящим моментом мотора (см., например, патентный документ 1).
Документы предшествующего уровня техники
Патентная литература
[0003] Выложенная заявка на патент (Япония) № 2003-9566
Сущность изобретения
Задачи для решения изобретением
[0004] Тем не менее в традиционной системе управления подавлением или демпфированием вибрации для транспортного средства с использованием электромотора, в любом сценарии поездки или движения, первый целевой крутящий момент (т.е. крутящий F/F-момент) и второй целевой крутящий момент (т.е. крутящий F/B-момент) вычисляются с использованием модели GP(s), задающей передаточную характеристику между входным крутящим моментом транспортного средства и скоростью вращения мотора.
Следовательно, в таких сценариях вождения существует проблема в том, что если крутильная вибрация приводной системы практически не формируется, F/F- и F/B-вычисления выполняются с ошибками и вызывают неожиданную вибрацию или толчок.
[0005] Например, в таких сценариях движения с прерыванием передачи крутящего момента, в которых шина или колесо вращается с проскальзыванием за счет движущей силы, либо муфта, расположенная в приводной системе или приводе на ведущие колеса, проскальзывает или расцепляется, и т.д., крутильная вибрация практически не возникает в ответ на изменение крутящего момента мотора. В этих сценариях движения, поскольку передаточная характеристика между входным крутящим моментом транспортного средства и скоростью вращения мотора значительно отличается от предварительно допущенной модели GP(s), F/F- и F/B-вычисления с использованием модели GP(s) приводят к ошибкам.
[0006] Настоящее изобретение осуществлено посредством ориентирования на проблемы, описанные выше, и имеет цель предоставления системы управления подавлением вибрации для электроприводного транспортного средства и способа подавления вибрации для него, которые позволяют подавлять или демпфировать неожиданную вибрацию или толчок во время прерываний в передаче крутящего момента.
Решение задач
[0007] Чтобы достигать вышеуказанной цели, система управления подавлением вибрации для электроприводного транспортного средства согласно настоящему изобретению выполнена с возможностью иметь, в электроприводном транспортном средстве с использованием электромотора в качестве источника мощности, датчик или детектор вращения, модуль вычисления целевого крутящего момента мотора, модуль вычисления первого целевого крутящего момента, модуль вычисления второго целевого крутящего момента, механизм задания команд крутящего момента мотора, механизм определения и механизм подавления вибрации.
Механизм обнаружения вращения обнаруживает частоту вращения мотора.
Модуль вычисления целевого крутящего момента мотора вычисляет целевой крутящий момент мотора на основе потребности или запроса водителя.
Модуль вычисления значения первого целевого крутящего момента вычисляет значение первого целевого крутящего момента посредством вычисления или операции с прямой связью с использованием модели передаточной характеристики между входным крутящим моментом и частотой вращения мотора относительно значения целевого крутящего момента мотора.
Модуль вычисления второго целевого крутящего момента вычисляет значение второго целевого крутящего момента на основе вычисления с обратной связью с использованием режима передаточной характеристики между входным крутящим моментом и частотой вращения мотора относительно частоты вращения мотора.
Механизм задания команд крутящего момента мотора суммирует значение первого целевого крутящего момента и значение второго целевого крутящего момента, чтобы получать команду крутящего момента мотора для мотора.
Механизм определения определяет то, совпадает или нет модель передаточной характеристики между входным крутящим моментом и частотой вращения мотора с фактической передаточной характеристикой.
Механизм подавления вибрации прекращает вычисление с прямой связью значения первого целевого крутящего момента на основе модуля вычисления первого целевого крутящего момента и вычисление с обратной связью значения второго целевого крутящего момента на основе модуля вычисления второго целевого крутящего момента и использует значение целевого крутящего электромотора в качестве значения команды крутящего момента мотора.
Преимущества изобретения
[0008] Таким образом, в то время как модель передаточной характеристики между входным крутящим моментом и частотой вращения мотора не определяется как совпадающая с фактическими передаточными характеристиками, прекращается как операция с прямой связью, так и операция с обратной связью.
Иными словами, во время прерываний передачи крутящего момента на ведущий вал передаточная характеристика частоты вращения мотора относительно входного крутящего момента для транспортного средства существенно отличается от модели, допущенной заранее. Следовательно, в то время как передача крутящего момента прерывается посредством прекращения операции с прямой связью и операции с обратной связью с использованием модели, может предотвращаться ошибка вследствие выполнения обеих операций.
Как результат, можно подавлять неожиданную вибрацию или толчок, вызываемый во время прерываний в передаче крутящего момента.
Краткое описание чертежей
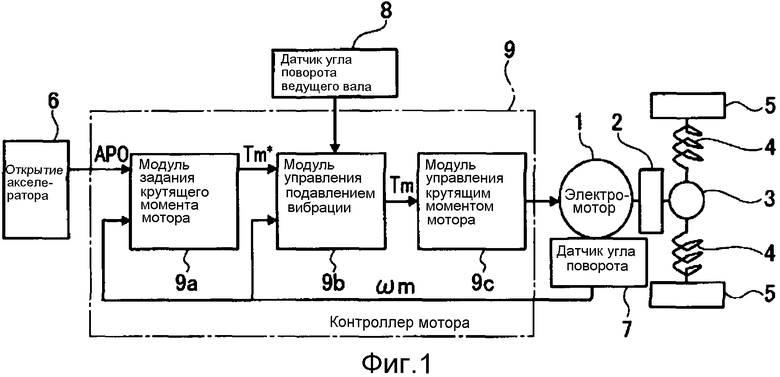
[0009] Фиг. 1 является схемой общей конфигурации, иллюстрирующей устройство управления подавлением вибрации для электромобиля (примера электроприводного транспортного средства) в первом варианте осуществления.
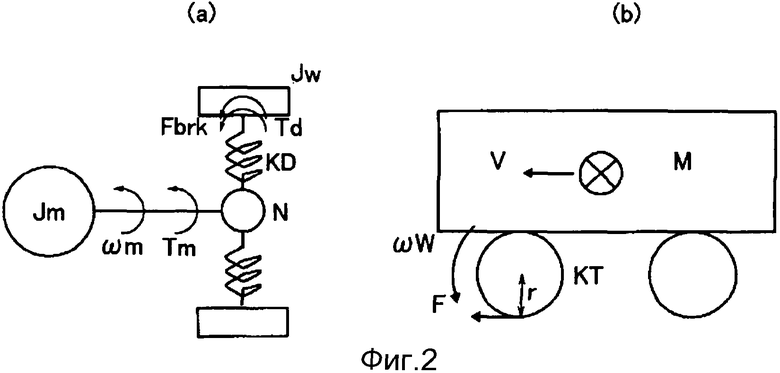
Фиг. 2 является принципиальной схемой уравнения движения приводной системы транспортного средства, при этом (a) показывает вид сверху системы крутильной вибрации, а (b) вид - ее вид сбоку, соответственно.
Фиг. 3 является блок-схемой управления, иллюстрирующей модуль 9b управления вибрацией, включенный в контроллер 9 мотора первого варианта осуществления.
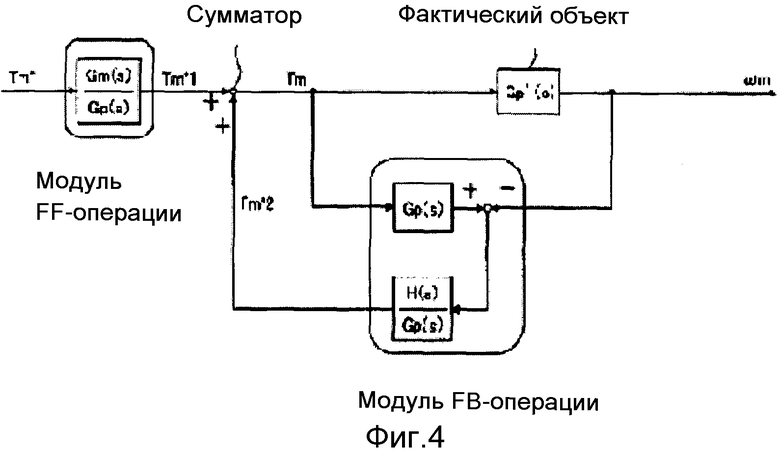
Фиг. 4 является блок-схемой управления, показывающей модуль управления подавлением вибрации в сравнительном примере.
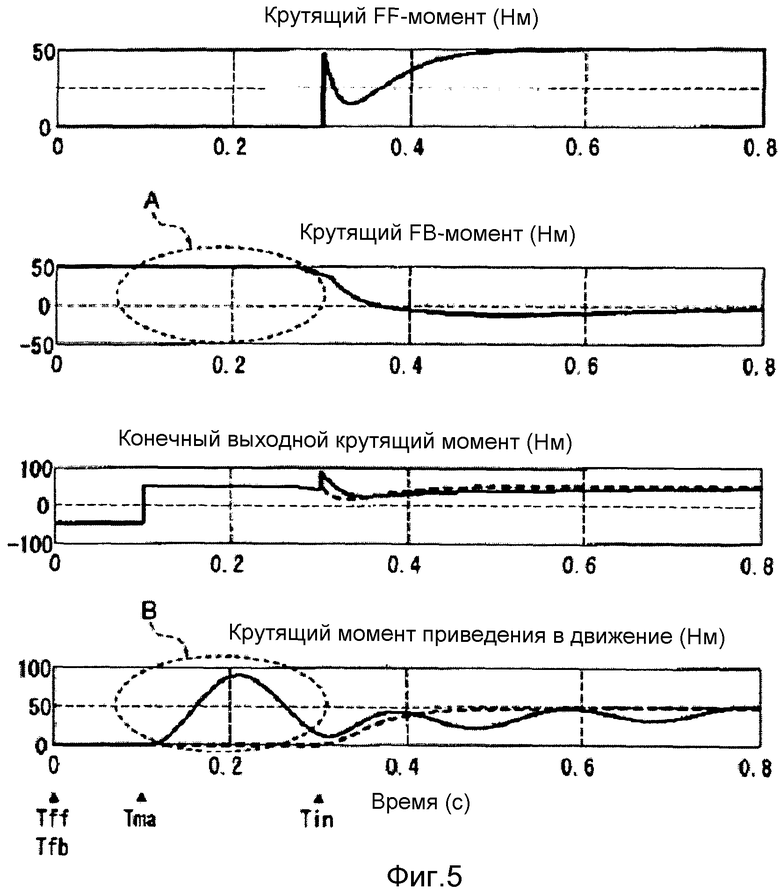
Фиг. 5 является временной диаграммой результатов моделирования, показывающей соответствующие характеристики крутящего FF-момента, крутящего FB-момента, конечного выходного крутящего момента и крутящего момента приведения в движение в начале движения электромобиля, к которому применяется управление подавлением вибрации сравнительного примера.
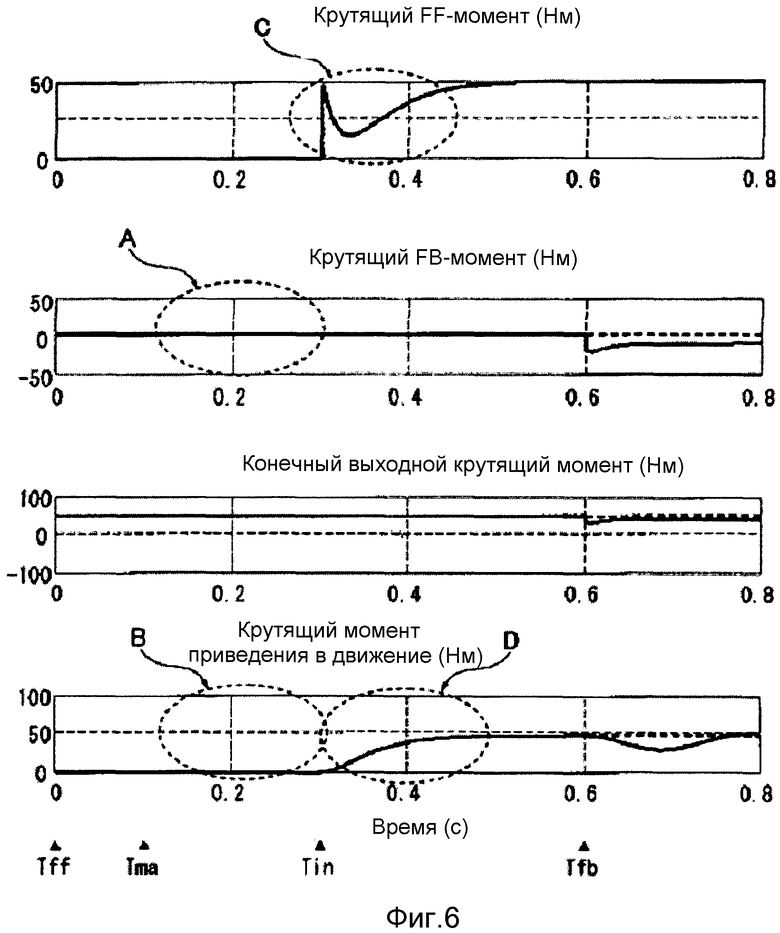
Фиг. 6 является временной диаграммой результатов моделирования, показывающей соответствующие характеристики крутящего FF-момента, крутящего FB-момента, конечного выходного крутящего момента и крутящего момента приведения в движение в начале движения электромобиля, к которому применяется управление подавлением вибрации первого варианта осуществления.
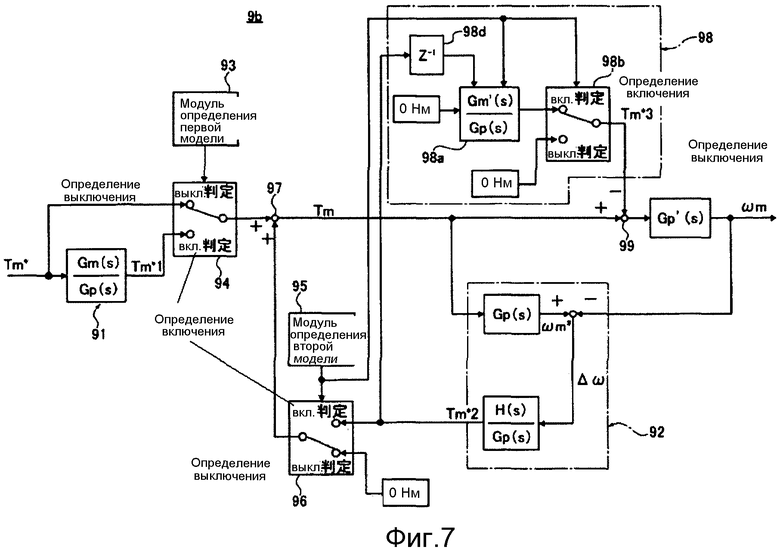
Фиг. 7 является блок-схемой управления, иллюстрирующей модуль 9b управления вибрацией, включенный в контроллер 9 мотора второго варианта осуществления.
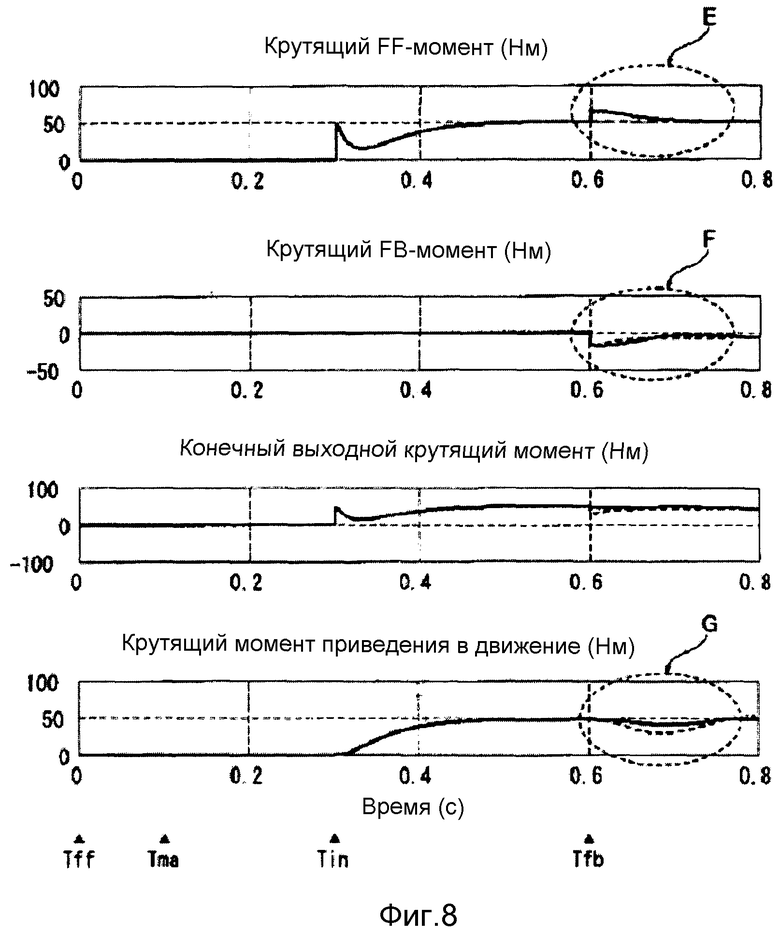
Фиг. 8 является временной диаграммой результатов моделирования, показывающей соответствующие характеристики крутящего FF-момента, крутящего FB-момента, конечного выходного крутящего момента и крутящего момента приведения в движение в начале движения электромобиля, к которому применяется управление подавлением вибрации второго варианта осуществления.
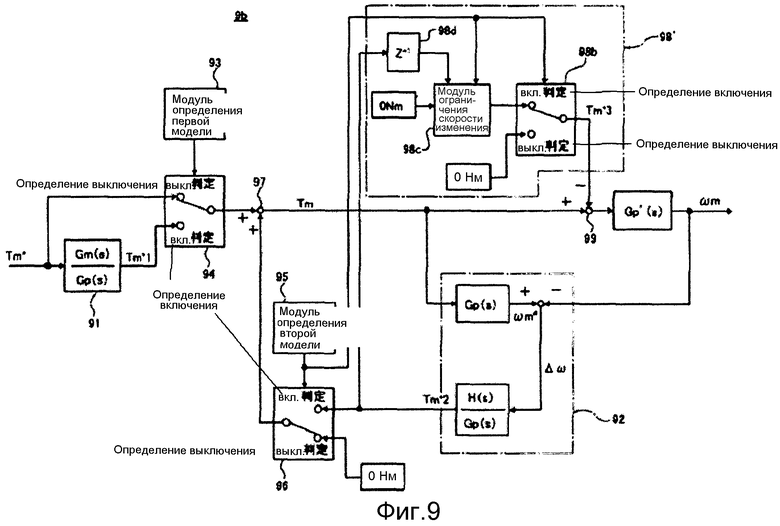
Фиг. 9 является блок-схемой управления, иллюстрирующей модуль 9b управления вибрацией, включенный в контроллер 9 мотора третьего варианта осуществления.
Варианты осуществления изобретения
[0010] Далее описывается самый предпочтительный режим в отношении первого-третьего вариантов осуществления, показанных на чертежах, который предоставляет систему управления демпфированием или подавлением колебаний электроприводного транспортного средства и способ подавления колебаний электроприводного транспортного средства согласно настоящему изобретению.
Первый вариант осуществления
[0011] Во-первых, приводится описание конфигурации.
Фиг. 1 является схемой общей конфигурации, иллюстрирующей устройство управления демпфированием или подавлением вибрации электромобиля (примера электроприводного транспортного средства) согласно первому варианту осуществления. Далее описывается общая конструкция на основе фиг. 1.
[0012] Как показано на фиг. 1, приводная система или привод на ведущие колеса устройства управления электромобиля, к которому применяется устройство управления подавлением вибрации, включает в себя электромотор 1 (мотор), ступенчатую трансмиссию 2, дифференциал 3, левый и правый ведущие валы или полуоси 4, 4 и левое и правое ведущие колеса 5, 5.
[0013] Как показано на фиг. 1, система управления устройством управления электромобиля, к которому применяется устройство управления подавлением вибрации в первом варианте осуществления, включает в себя датчик 6 открытия акселератора, датчик 7 угла поворота мотора, датчик 8 угла поворота ведущего вала и контроллер 9 мотора.
[0014] Датчик 6 открытия акселератора обнаруживает открытие APO акселератора, осуществляемое посредством операции нажатия педали акселератора водителем. Датчик 7 угла поворота мотора обнаруживает угловую скорость ωm мотора посредством использования кругового датчика позиции и т.п. Датчик 8 угла поворота ведущего вала обнаруживает угловую скорость ωw ведущего колеса.
[0015] Контроллер 9 мотора представляет механизм управления, чтобы управлять крутящим моментом мотора для электромотора 1 на основе входной информации, и включает в себя модуль 9a задания крутящего момента мотора, модуль 9b управления подавлением вибрации и модуль 9c управления крутящим моментом мотора.
[0016] Модуль 9a задания крутящего момента мотора вычисляет значение Tm* целевого крутящего момента установившегося состояния на основе открытия APO акселератора из датчика 6 открытия акселератора и угловой скорости ωm мотора из датчика 7 угла поворота мотора.
[0017] Модуль 9b управления подавлением вибрации принимает целевой крутящий момент Tm* установившегося состояния, угловую скорость ωm мотора и угловую скорость ωw ведущего колеса. Помимо этого, за исключением периода прерывания передачи крутящего момента, значение Tm команды крутящего момента мотора определяется посредством выполнения F/F-вычисления или операции с использованием идеальной модели Gm(s) и модели GP(s) передаточной характеристики между вводом мотора транспортного средства и частотой вращения мотора и F/B-вычисления или операции с использованием модели GP(s) и полосового фильтра H(s).
[0018] Модуль 9c управления крутящим моментом мотора приводит в действие инвертор (не показан) через PWM-сигнал и т.п. и управляет выходным крутящим моментом электромотора 1 согласно команде Tm крутящего момента мотора.
[0019] Далее на основе фиг. 2 приводится описание модели Gp(s) Gp передаточной характеристики между входным крутящим моментом для транспортного средства и частотой вращения мотора. Фиг. 2(a), (b), соответственно, показывают пояснительную схему, представляющую уравнение движения приводной системы транспортного средства, при этом ссылки с номерами, соответственно, обозначают:
Jm - инерция мотора
Jw - инерция ведущего колеса
M - масса транспортного средства
Kd - крутильная жесткость приводной системы
Kt - коэффициент трения шины на поверхности дороги
N - общее передаточное число
r - радиус шины под нагрузкой
ωm - угловая скорость мотора
Tm - крутящий момент мотора
TD - крутящий момент ведущих колес
F - сила, приложенная к транспортному средству
V - скорость транспортного средства
ωw - угловая скорость ведущего колеса
[0020] На основе фиг. 2 могут извлекаться следующие уравнения движения (1)-(5):
Jm*dωm/dt=Tm-TD/N …(1)
2Jw*dωm/dt=TD-rF-Fbrk …(2)
M*dV/dt=F …(3)
TD=KD∫(ωm/N-ωw)dt …(4)
F=KT(rωw-V) …(5)
[0021] Затем, на основе уравнений (1)-(5), передаточная функция GP(s) частоты вращения мотора из крутящего момента мотора может выражаться следующим образом:
Gp(s)=(b3s3+b2s2+b1s+b0)/s (a4s3+a3s2+a2s+a1) …(6)
a4=2Jm*Jw*M …(7)
a3=Jm(2Jw+Mr2)KT …(8)
a2={Jm+(2Jw/N2)}M*KD …(9)
a1={Jm+(2Jw/N2)+(Mr2/N2)}KD*KT …(10)
b3=2Jw*M …(11)
b2=Jm (2Jw+Mr2)KT …(12)
b1=M*KD …(13)
b0=KD*KT …(14)
[0022] Здесь, изучение полюсов и нулевой точки передаточной функции уравнения (6) раскрывает, что один полюс и один нуль указывают значения очень близко друг к другу. Это является эквивалентным демонстрации того, что значения α, β находятся очень близко, в следующем уравнении (15).
Gp(s)=(s+β)(b2's2+b1's+b0')/s(s+α)(a3's2+a2's+a1') …(15)
Следовательно, посредством аппроксимации как α=β, т.е. отмены нулей и полюсов в уравнении (15), получаем:
Gp(s)=(b2's2+b1's+b0')/s(a3's2+a2's+a1') …(16)
Таким образом, как показано в вышеприведенном уравнении (16), модель GP(s) передаточной характеристики входного крутящего момента для транспортного средства и частоты вращения мотора представляется в форме (второй порядок)/(третий порядок).
[0023] Далее приводится описание полосового фильтра H(s).
H(s) служит в качестве элемента с обратной связью, уменьшающего вибрацию только тогда, когда задан в качестве полосового фильтра. В этом случае частота fp задается как резонансная частота тягового усилия и передаточная характеристика H(s) конфигурируется в следующем уравнении (17), в таком случае характеристика подавления вибрации является приблизительно идентичной между стороной нижних частот и стороной верхних частот, и резонансная частота вибрации тягового усилия задается равной примерно середине полосы пропускания на логарифмической оси (логарифмической шкале).
H(s)=τHs/{(1+τHs)*(1+τLs)} …(17),
где
τL=1/(2πfHC), fHC=fp, τH=1/(2πfLC), fLC=fp
Таким образом, полосовой фильтр H(s) конфигурируется посредством передаточной характеристики, представленной посредством уравнения (17).
[0024] Фиг. 3 является блок-схемой управления, иллюстрирующей модуль 9b управления вибрацией, включенный в контроллер 9 мотора в первом варианте осуществления. Далее описывается конфигурация модуля 9b управления демпфированием или подавлением, на основе фиг. 3.
[0025] Как показано на фиг. 3, модуль управления подавлением вибрации включает в себя модуль 91 F/F-вычисления или операции (средство вычисления значения первого целевого крутящего момента), модуль 92 F/B-вычисления или операции (средство вычисления значения второго целевого крутящего момента), модуль 93 определения первой модели (средство определения), модуль 94 переключения первого целевого крутящего момента (средство подавления вибрации), модуль 95 определения второй модели (средство определения), модуль 96 переключения второго целевого крутящего момента и сумматор 97 (средство задания значений команд крутящего момента мотора).
[0026] Модуль 91 F/F-вычисления принимает целевое значение Tm* установившегося состояния и вычисляет значение Tm*1 первого целевого крутящего момента посредством пропускания через фильтр, Gm(s)/Gp(s) с использованием идеальной модели Gm(s) и модели GP(s) между входным крутящим моментом транспортного средства и частотой вращения мотора.
[0027] Модуль 92 F/B-вычисления или операции вычисляет оценку ωm# угловой скорости мотора из значения Tm команды крутящего момента мотора и модели GP(s). С другой стороны, угловая скорость ωm мотора обнаруживается посредством датчика угловой скорости или частоты вращения мотора 7, когда в фактический объект GP'(s) предоставляется команда Tm крутящего момента мотора через инвертор. Получается отклонение Δω между оценкой ωm# частоты вращения мотора и частотой ωm вращения мотора, и посредством пропускания этого отклонения Δω через фильтр, состоящий из H(s)/Gp(s) с использованием модели GP(s) и полосового фильтра H(s), вычисляется второй целевой крутящий момент Tm*2.
[0028] Модуль 93 определения первой модели определяет то, совпадают или нет фактические передаточные характеристики в значительной степени с моделью GP(s) передаточной характеристики между входным крутящим моментом транспортного средства и частотой вращения мотора.
Более конкретно, способ определения посредством модуля 93 определения первой модели осуществляется таким образом, что когда абсолютное значение разности между угловой скоростью или частотой ωm вращения мотора, обнаруженной посредством датчика 7 угла поворота мотора, и угловой скоростью ωw ведущего колеса ниже или равно предварительно определенному значению, подтверждается существенное совпадение, и выполняется определение включения (например, время Tff на фиг. 6 представляет "время определения на основе существенного совпадения"). С другой стороны, когда абсолютное значение разности между угловой скоростью ωm мотора и угловой скоростью ωw ведущего колеса превышает предварительно определенное значение, то подтверждается условие прерывания крутящего момента, при котором фактическая передаточная характеристика отличается от модели GP(s). Следует отметить, что угловая скорость ωw ведущего вала преобразуется таким образом, чтобы получать соответствующую угловую скорость вала электромотора с учетом передаточного отношения ступенчатой трансмиссии 2. Тем не менее, когда передаточное отношение или передаточное число в электромоторе 1 через ведущее колесо 5 не является окончательным, может быть использовано передаточное число при завершении процесса переключения передач. Помимо этого, когда модуль 93 определения первой модели осуществляет определение включения, то модуль 91 F/F-вычисления начинает F/F-вычисление.
[0029] Вышеприведенный модуль 94 переключения значений первого целевого крутящего момента является переключателем для переключения вывода на основе результата определения модуля 93 определения первой модели. Более конкретно, когда результат определения в модуле определения 93 первой модели представляет собой определение выключения, то значение Tm* целевого крутящего момента установившегося состояния должно отправляться в сумматор 97. Когда модуль 93 определения первой модели определяет определение включения, первый целевой крутящий момент Tm*1 должен выводиться в сумматор 97.
[0030] Модуль 95 определения второй модели определяет то, совпадает или нет фактическая передаточная характеристика полностью с моделью GP(s) передаточной характеристики между входным крутящим моментом транспортного средства и частотой вращения мотора.
Более конкретно, способ определения, используемый в этом способе определения второй модели, является таким, что когда абсолютное значение разности между угловой скоростью ωm мотора, обнаруженной посредством датчика 7 угла поворота мотора, и угловой скоростью ωw ведущего колеса поддерживается ниже или равным предварительно определенному значению в течение предварительно определенного времени, подтверждается полное совпадение для определения включения (например, время Tfb на фиг. 6 представляет "время для определения на основе полного совпадения"). С другой стороны, когда абсолютное значение разности между угловой скоростью ωm мотора и угловой скоростью ωw ведущего колеса превышает предварительно определенное значение, или абсолютное значение разности поддерживается ниже или равным предварительно определенному значению в течение меньше предварительно определенного времени, то подтверждается условие прерывания передачи крутящего момента посредством определения выключения. Другими словами, поскольку модуль 95 определения второй модели требует предварительно определенного времени определения включения, тактирование определения включения всегда позже, чем для модуля 93 определения первой модели.
Угловая скорость ωw ведущего вала преобразуется аналогично модулю 93 определения первой модели, так что соответствующая угловая скорость вала электромотора доступна посредством использования передаточного отношения или передаточного числа многоступенчатой трансмиссии 2. Тем не менее, когда передаточное число в электромоторе 1 через ведущие колеса 5, 5 не является окончательным, то должно быть использовано передаточное число при завершении процесса переключения передач. Помимо этого, после определения включения посредством модуля 93 определения первой модели должно быть начато F/B-вычисление посредством модуля F/B-вычисления.
[0031] Модуль 96 переключения второго целевого крутящего момента является переключателем, который переключает вывод на основе результата определения модуля 95 определения второй модели. Более конкретно, когда результат определения модуля определения 95 представляет собой определение выключения, в сумматор 97 должно выводиться 0 Нм. Когда результат определения результата определения второй модели указывает определение включения, в сумматор 97 должно выводиться значение Tm*2 второго целевого крутящего момента.
[0032] Сумматор 97 комбинирует или суммирует вывод из модуля 94 переключения первого целевого крутящего момента и вывод из модуля 96 переключения второго целевого крутящего момента, чтобы формировать или задавать значение Tm команды крутящего момента мотора. Когда как модуль 94 переключения первого целевого крутящего момента, так и модуль 96 переключения второго крутящего момента указывают определение включения, Tm должно задаваться равным Tm*1+Tm*2.
Когда как модуль 94 переключения первого целевого крутящего момента, так и модуль 96 переключения второго целевого крутящего момента указывают определение выключения, Tm должно задаваться равным Tm*. Когда модуль 94 переключения первого целевого крутящего момента осуществляет определение включения, тогда как модуль 96 переключения второго целевого крутящего момента указывает определение выключения, Tm задается как Tm*1.
[0033] Далее поясняется работа.
Сначала приводится описание "задачи сравнительного примера". Затем поясняются операции демпфирования или подавления вибрации относительно электромобиля в первом варианте осуществления посредством разделения "операции подавления вибрации в ходе сценария движения, в котором передаточная характеристика отличается от модели GP(s)" и "операции подавления вибрации, если передаточная характеристика сдвигается к совпадению с моделью".
[0034] [Задача сравнительного примера]
Предполагается, что в сравнительном примере, как показано на фиг. 4, модуль подавления вибрации состоит из модуля F/F-вычисления, модуля F/B-вычисления и сумматора.
[0035] Модуль F/F-вычисления принимает целевой крутящий момент Tm* установившегося состояния и вычисляет первый целевой крутящий момент Tm*1 посредством пропускания через идеальную модель Gm(s) и GP(s) между входным крутящим моментом транспортного средства и частотой вращения мотора. Целевой Tm* установившегося состояния определяется на основе открытия акселератора и частоты вращения мотора.
[0036] Модуль F/B-вычисления вычисляет оценку частоты вращения мотора на основе передаточной характеристики GP(s) между входным крутящим моментом транспортного средства и скоростью вращения мотора. Затем, посредством ввода разности между оценкой частоты вращения мотора и определенным значением и через пропускание F/В-вычисления через фильтр H(s)/Gp(s) с использованием модели GP(s) и полосового фильтра H(s), чтобы вычислять второй целевой крутящий момент Tm*2.
[0037] Сумматор суммирует первый целевой крутящий момент Tm*1 и второй целевой крутящий момент Tm*2, чтобы получать команду Tm крутящего момента мотора. Затем, управление выполняется таким образом, что фактический выходной крутящий момент электромотора совпадает или соответствует команде Tm крутящего момента мотора.
[0038] В сравнительном примере в каждом состоянии движения разность между обнаруженным значением частоты вращения мотора и оценкой частоты вращения мотора, вычисленной посредством модели GP(s), используется для того, чтобы вычислять крутящий F/B-момент (второй целевой крутящий момент Tm*2).
Следовательно, в таких сценариях движения, в которых вибрация привода на ведущие колеса практически не возникает в ответ на изменение крутящего момента мотора (например, в сценариях движения (a), (b), поясненных ниже), поскольку передаточная характеристика частоты вращения мотора относительно входного крутящего момента для транспортного средства значительно отличается от предварительно оцененной модели GP(s), так что F/B-вычисление выполняется с ошибкой с сопровождаемой неожиданной вибрацией или толчком.
[0039] (a) Если коэффициент трения между ведущим колесом и поверхностью дороги является небольшим, и ведущие колеса чрезмерно проскальзывают, шина просто вращается, поскольку противодействующая сила от поверхности дороги меньше, несмотря на изменение крутящего момента мотора, так что привод на ведущие колеса крутится без большого сопротивления.
[0040] (b) Если в системе, имеющей одну или более муфт для избирательной подачи и отключения мощности между приводным мотором и ведущими колесами, муфта проскальзывает или расцепляется, то передача крутящего момента на ведущие колеса, несмотря на изменение крутящего момента мотора, прерывается посредством муфты, так что мотор просто вращается на холостом ходу без прокручивания привода на ведущие колеса.
[0041] Чтобы справляться с вышеуказанной ошибкой F/B-вычисления, возможная стратегия должна состоять в том, чтобы начинать операцию или вычисление F/B после подтверждения того, что передаточная характеристика частоты вращения мотора относительно входного крутящего момента для транспортного средства является согласованной с моделью GP(s). В этом случае, тем не менее, вследствие неизбежной задержки или допуска измерения в релевантных датчиках, которые измеряют состояние транспортного средства, затрудняется определение при идеальном тактировании. Следовательно, чтобы предотвращать ошибку F/B-операции или вычисления, необходимо выполнять определение надежно, хотя и при немного более медленном тактировании, чем фактическое. Тем не менее, существует вероятность вибрации вследствие изменения крутящего момента установившегося состояния, когда в течение задержанного периода времени целевой крутящий момент установившегося состояния изменяется без проведения F/F-операции или вычисления.
[0042] Далее описываются результаты моделирования сравнительного примера со ссылкой на фиг. 5.
Корреляция или соответствие между каждой формой сигнала, показанной на фиг. 5 и на блок-схеме на фиг. 4, заключается в следующем:
"крутящий FF-момент"="значение Tm*1 первого целевого крутящего момента"
"крутящий FB-момент"="значение Tm*2 второго целевого крутящего момента"
"конечный выходной крутящий момент"="Tm*1+Tm*2".
[0043] Далее приводится описание начала операции (пример сценариев движения). Для сравнения задачи добавляется условие выключения в F/B-операции.
Условие
Время, в которое передаточная характеристика частоты вращения мотора относительно входного крутящего момента транспортного средства совпадает с Tma фактической модели GP(s): 0,1 [с]
Время Tin ввода значения установившегося целевого крутящего момента: 0,3 [с]
Время Tff начала F/F-вычисления: 0,0 [с]
Время Tfb начала вычисления F/B: 0,0 [с] (сплошная линия)
F/B-операция выключена (пунктирная линия)
Описание
F/B-операция начинается во время Tff до времени Tma, в которое передаточная характеристика частоты вращения мотора относительно входного крутящего момента для транспортного средства фактически совпадает с моделью GP(s). Следовательно, в момент времени, когда передаточная характеристика GP(s) частоты вращения мотора в зависимости от входного крутящего момента мотора совпадает с фактической передаточной характеристикой, вследствие внезапного изменения цели управления, как показано в качестве характеристики крутящего FB-момента на фиг. 5 посредством стрелки A, F/B-вычисление выполняется с ошибкой. Следовательно, как показано на фиг. 5, в качестве характеристики крутящего момента приведения в движение посредством стрелки B, колебание крутящего момента становится некомфортным для водителя между временем совпадения между Tma модели GP(s) и фактической характеристикой Tma через время Tin ввода цели установившегося состояния. Следовательно, после времени Tin ввода целевого значения, периодическая вибрация наблюдается вследствие периодического изменения крутящего момента приведения в движение. В этой связи, характеристики крутящего момента приведения в движение в идеальных условиях (пунктирная линия) с выключенным F/B-вычислением не указывают колебание крутящего момента в течение периода времени между временем Tma соответствия между моделью GP(s) и фактической характеристикой через Tin времени ввода целевого крутящего момента установившегося состояния.
[0044] [Операция подавления вибрации в сценарии движения, в котором передаточная характеристика отличается от модели GP(s)]
Как описано выше, в сценариях движения, в которых передаточная характеристика отличается от модели GP(s), необходимо минимизировать влияние, вызываемое посредством ошибок F/F- и F/B-вычислений. Далее, операция подавления вибрации описывается в сценарии движения, в котором передаточная характеристика, отражающая их, отличается от модели GP(s).
[0045] Как описано выше, в случаях, если колесо вращается с проскальзыванием за счет движущей силы, либо муфта, размещенная в приводе на ведущие колеса, проскальзывает или расцепляется, и т.п., т.е. в сценарии движения с прерыванием передачи крутящего момента мотора возникает незначительная вибрация тягового усилия вследствие изменения крутящего момента мотора.
[0046] В таком сценарии движения вследствие отличия фактической характеристики передачи от модели GP(s), абсолютное значение разности между угловой скоростью ωm мотора, обнаруженной посредством датчика 7 угла поворота мотора, и угловой скоростью ωw ведущего колеса, обнаруженной посредством датчика угловой скорости ведущего колеса 8, превышает предварительно определенное значение. Следовательно, в модуле 93 определения первой модели выполняется определение FF «0» в качестве состояния прерывания или отключения передачи крутящего момента, и в модуле 94 переключения первого целевого крутящего момента целевой крутящий момент Tm* установившегося состояния переключается так, что он выводится в сумматор 97. Дополнительно, также в модуле 95 определения второй модели выполняется определение выключения в качестве состояния отключения крутящего момента, и в модуле 96 переключения второго целевого крутящего момента «0» Нм переключается так, что он выводится в сумматор 97. Следовательно, значение Tm команды крутящего момента мотора задается посредством следующего выражения: Tm=(Tm*+0)=Tm*.
[0047] Как описано выше, в первом варианте осуществления, когда определяется прерывание в передаче крутящего момента, приспособлена конструкция для того, чтобы прекращать F/F- и F/B-операцию или вычисления с использованием модели GP(s).
Другими словами, в течение периода прерывания передачи крутящего момента на ведущие колеса 5, 5, передаточная характеристика частоты вращения мотора относительно входного крутящего момента для транспортного средства значительно отличается от модели Gp, допущенной заранее, возникает ошибка при выполнении F/F- и F/B-вычислений с использованием модели GP(s).
Следовательно, когда определяется такой сценарий движения, что передача крутящего момента разрывается или прерывается, за счет предотвращения ошибочного выполнения F/F- и F/B-вычислений может быть уменьшена вероятность неожиданной вибрации и толчка.
[0048] [Эффект демпфирования или подавления вибрации в сценарии движения при сдвиге передаточной характеристики в направлении совпадения с моделью]
Как описано выше, при начале управления крутящим моментом из состояния нулевых F/F- и F/B-операций, чтобы подавлять возникновение колебаний крутящего момента вследствие ошибки F/B-операции, начало F/F-операции задается раньше, и затем необходимо задерживать время начала F/B-операции относительно F/F-операции. Далее описывается эффект демпфирования в сценарии вождения, в котором передаточная характеристика, отражающая этот случай, действует в состоянии движения в направлении совпадения с моделью.
[0049] Как описано выше, во время перехода из сценария, в котором передача крутящего момента приведения в движение прерывается, обратно к обычной передаче крутящего момента посредством зацепления муфты и подавления движения с проскальзыванием и т.п., прекращенные F/F- и F/B-вычисления должны возобновляться. Другими словами, на основе возмущающего крутящего момента, вызванного зазором шестерен и т.п., подавляющий эффект для крутильной вибрации, обусловленной системой передачи движущей силы, должен быть получен посредством F/F- и F/B-вычислений.
[0050] В таком переходном состоянии сценария движения, поскольку передаточная характеристика частоты вращения мотора в ответ на входной крутящий момент транспортного средства постепенно приближается к предварительно допущенной модели, абсолютное значение разности между угловой скоростью ωm мотора, обнаруженной посредством датчика 7 угла поворота мотора, и угловой скоростью ωw ведущего колеса, обнаруженной посредством датчика 8 угла поворота ведущего вала, находится в пределах предварительно определенного значения. Следовательно, в модуле 93 определения первой модели выполняется определение включения в отношении того, что фактическая передаточная характеристика является в значительной степени согласованной с моделью GP(s), и в модуле 94 переключения первого целевого крутящего момента первый целевой крутящий момент Tm*1 переключается так, что он выводится в сумматор 97.
[0051] С другой стороны, в переходном состоянии сценария движения, чтобы передаточная характеристика частоты вращения мотора относительно входного крутящего момента для транспортного средства точно совпадала с предварительно допущенной моделью GP(s), необходимо ожидать истечения предварительно определенного времени, в которое абсолютное значение разности между угловой скоростью ωm мотора и угловой скоростью ωw ведущих колес остается в пределах предварительно определенного значения в течение предварительно определенного времени. Таким образом, в модуле 95 определения второй модели, после того, как предварительно определенное время истекло от того, когда абсолютное значение разности между угловой скоростью ωm мотора и угловой скоростью ωw ведущего колеса остается в пределах предварительно определенного значения, выполняется определение включения, и в модуле 96 переключения второго целевого крутящего момента второй целевой крутящий момент Tm*2 переключается так, что он выводится в сумматор 97.
[0052] Таким образом, в течение периода времени, в который модуль 94 переключения первого целевого крутящего момента выполняет определение включения, а модуль 96 переключения второго целевого крутящего момента выполняет определение выключения, в сумматоре 97 значение Tm команды крутящего момента мотора задается посредством следующего уравнения: Tm=Tm*1. Кроме того, когда как модуль 94 переключения первого целевого крутящего момента, так и модуль 96 переключения второго целевого крутящего момента выполняют определение включения, в сумматоре 97 команда Tm крутящего момента мотора задается посредством уравнения Tm=Tm*1+Tm*2.
[0053] Далее приводится описание результатов моделирования первого варианта осуществления со ссылкой на фиг. 6.
Соответствие или корреляция между каждой формой сигнала на фиг. 6 и на блок-схеме на фиг. 3 заключается в следующем:
"крутящий FF-момент"="значение Tm*1 первого целевого крутящего момента"
"крутящий FB-момент"="значение Tm*2 второго целевого крутящего момента"
"конечный выходной крутящий момент"="Tm*1+Tm*2"
[0054] Далее приводится описание начала операции по фиг. 6 (пример сценария движения). Условие выключения F/B-вычисления добавляется для сравнения.
Условие
Время Tma, в которое передаточные характеристики частоты вращения мотора относительно входного крутящего момента транспортного средства фактически совпадают с моделью GP(s): 0,1 [с]
Время Tin ввода значения установившегося целевого крутящего момента: 0,3 [с]
Время Tff начала F/F-операции (время при решении относительно существенного совпадения): 0,0 [с]
Время Tfb начала F/B-операции (время при решении относительно точного совпадения): 0,6 [с] (сплошная линия)
F/B-операция выключена (пунктирная линия)
Описание
Tma задается как время совпадения с моделью, в которое передаточная характеристика частоты вращения мотора относительно входного крутящего момента транспортного средства фактически совпадает с моделью GP(s). F/B-вычисление начинается во время Tfb принятия решения о точном совпадении (0,6 [с]), которое представляет собой время позже времени Tma совпадения с моделью (0,1 [с]). Следовательно, здесь может предотвращаться ошибка F/B-вычисления, сформированная в сравнительном примере (стрелка A, фиг. 6), и может подавляться колебание крутящего момента, приводящее к дискомфорту водителя (стрелка B, фиг. 6).
[0055] Кроме того, F/F-операция начинается в более раннее время, чем время Tma совпадения с моделью (0,1 [с]), т.е. во время Tff существенного совпадения (0,0 [с]), Следовательно, как показано в характеристике крутящего FF-момента, указываемой посредством стрелки C на фиг. 6, FF-операция осуществляется требуемым образом, и как показано в характеристике крутящего момента приведения в движение, указываемой посредством стрелки D на фиг. 6, может достигаться переходная характеристика, близкая к идеальному состоянию (пунктирная линия).
[0056] Как описано выше, в первом варианте осуществления при определении перехода к началу передачи крутящего момента от разорванной или прерванной передачи крутящего момента на ведущие валы 5, 5 приспособлена такая конфигурация, в которой FF-операция предшествует F/B-операции.
Более конкретно, на основе определения начала передачи крутящего момента, когда как F/F-операция, так и F/B-операция начинаются одновременно, во время, когда передаточная характеристика фактически совпадает с предварительно допущенной моделью GP(s), назначение или цель управления резко изменяется, так что F/B-операция выполняется с ошибкой, и передаточный крутящий момент колеблется с возможной результирующей вибрацией тягового усилия привода на ведущие колеса (см. сравнительный пример).
Напротив, поскольку FF-операция начинает осуществляться в ответ на изменение установившегося крутящего момента до времени, когда передаточная характеристика фактически совпадает с предварительно допущенной моделью GP(s), может предотвращаться вибрация, налагаемая вследствие изменения крутящего момента установившегося состояния после того, как передаточная характеристика совпадет с предварительно допущенной моделью GP(s). Помимо этого, ошибка вследствие проведения F/B-операции до фактического совпадения передаточной характеристики с предварительно заданной моделью GP(s) может предотвращаться вследствие выполнения F/B-операции позже состояния совпадения. Следовательно, в таких сценариях движения, как при операции начала движения транспортного средства или при зацеплении расцепленной муфты во время езды транспортного средства и т.п., т.е. в области начала передачи крутящего момента, может подавляться неожиданная вибрация и толчок.
[0057] Далее описываются технические преимущества.
В системе управления подавлением вибрации для электромобиля в первом варианте осуществления могут достигаться следующие преимущества.
[0058] (1) Электроприводное транспортное средство (электромобиль), имеющее электроприводной мотор (электромотор 1) в качестве источника мощности, содержит
- детектор частоты вращения (датчик 7 угла поворота мотора) для обнаружения частоты вращения (угловой скорости ωm мотора) мотора (электромотора 1);
- модуль вычисления целевого крутящего момента мотора (модуль 9a задания крутящего момента мотора) для вычисления значения целевого крутящего момента мотора (целевого крутящего момента Tm* установившегося состояния) в ответ на запрос водителя;
- модуль вычисления первого целевого крутящего момента (модуль 91 F/F-операции) для вычисления первого целевого крутящего момента Tm*1 посредством F/F-операции или вычисления с использованием передаточной характеристики между входным крутящим моментом и частотой вращения мотора, в ответ на значение целевого крутящего момента мотора (значение Tm* целевого крутящего момента установившегося состояния);
- модуль вычисления второго целевого крутящего момента (модуль 92 F/B-операции) для вычисления второго целевого крутящего момента Tm*2 посредством F/B-операции или вычисления с использованием передаточной характеристики между входным крутящим моментом и частотой вращения мотора, на основе частоты вращения (угловой скорости ωm мотора) мотора (электромотора 1);
- механизм задания команд крутящего момента мотора (сумматор 97) посредством суммирования первого целевого крутящего момента Tm*1 и второго целевого крутящего момента Tm*2, чтобы получать значение Tm команды крутящего момента мотора для мотора (электромотора 1);
- механизм определения (модуль 93 определения первой модели, модуль 95 определения 95 второй модели), чтобы определять то, совпадает или нет модель GP(s) передаточной характеристики между входным крутящим моментом и частотой вращения мотора с фактической передаточной характеристикой; и
- механизм подавления вибрации (модуль 94 переключения первого целевого крутящего момента, модуль 96 переключения второго целевого крутящего момента) для задания целевого крутящего момента мотора (целевого крутящего момента Tm* установившегося состояния) в качестве команды Tm крутящего момента мотора в течение периода времени, в который передаточная характеристика GP(s) между входным крутящим моментом и частотой вращения мотора не определяется как совпадающая с фактической передаточной характеристикой, при прекращении F/F-операции первого целевого крутящего момента Tm*1 с использованием модуля вычисления первого целевого крутящего момента (модуля 91 F/F-операции) и F/B-операции второго целевого крутящего момента Tm*2 с использованием механизма вычисления второго целевого крутящего момента (модуля 92 F/B-вычисления или операции).
Следовательно, можно предоставлять устройство управления демпфированием или подавлением вибрации для электроприводного транспортного средства (электромобиля), чтобы предотвращать неожиданную вибрацию или толчок от формирования во время состояния разрывности при передаче крутящего момента.
[0059] (2) Механизм подавления вибрации (модуль 94 переключения первого целевого крутящего момента, модуль 96 переключения второго целевого крутящего момента) вычисляет команду Tm крутящего момента мотора после определения удовлетворения условия восстановления посредством начала F/F-вычисления или операции первого целевого крутящего момента Tm*1 с использованием модуля вычисления первого целевого крутящего момента (модуля 91 F/F-операции) до F/B-операции второго целевого крутящего момента Tm*2 с использованием модуля вычисления второго целевого крутящего момента (модуля 92 F/B-операции).
Следовательно, в дополнение к преимуществам (1), дополнительно можно подавлять неожиданную вибрацию или толчок в переходной области к началу передачи крутящего момента от прерывания передачи крутящего момента.
[0060] (3) Механизм определения (модуль 93 определения первой модели, модуль 95 определения второй модели) определяет то, что передаточная характеристика GP(s) между входным крутящим моментом и частотой вращения мотора не является согласованной с фактической передаточной характеристикой, когда абсолютное значение разности между угловой скоростью ωm мотора и угловой скоростью ωw ведущего колеса превышает предварительно определенное значение.
Следовательно, помимо преимущества (1) или (2), на основе абсолютного значения разности между угловой скоростью ωm мотора и угловой скоростью ωw ведущего колеса определяется состояние отсутствия совпадения между передаточной характеристикой GP(s) между входным крутящим моментом и частотой вращения мотора и фактической передаточной характеристикой с высокой точностью.
[0061] (4) Механизм определения (модуль 93 определения первой модели, модуль 95 определения второй модели) определяет то, что условие восстановления удовлетворяется, когда абсолютное значение разности между угловой скоростью ωm мотора и угловой скоростью ωw ведущего колеса находится в пределах предварительно определенного значения.
Следовательно, в дополнение к преимуществам (2) или (3), на основе абсолютного значения разности между угловой скоростью ωm мотора и угловой скоростью ωw ведущего колеса, выполняется переход к восстановлению после состояния, в котором модель GP(s) передаточной характеристики между входным крутящим моментом и частотой вращения мотора не совпадает с фактической передаточной характеристикой.
[0062] (5) Модуль вычисления первого целевого крутящего момента (модуль 91 F/F-операции) принимает целевой крутящий момент Tm* установившегося состояния, определенный на основе запроса водителя, и вычисляет первый целевой крутящий момент Tm*1 посредством пропускания F/F-операции или вычисления через фильтр Gm(s)/Gp(s) с использованием идеальной модели передаточной характеристики между входным крутящим моментом и частотой вращения мотора и модели GP(s).
Модуль вычисления второго целевого крутящего момента (модуль 92 F/B-операции) вычисляет оценку ωm# частоты вращения мотора из модели GP(s) передаточной характеристики между входным крутящим моментом для транспортного средства и частотой вращения мотора, принимает разность Δω между оценкой ωm# частоты вращения мотора и обнаруженным значением частоты вращения мотора ωm и вычисляет второй целевой крутящий момент Tm*2 посредством пропускания F/B-операции через фильтр H(s)/Gp(s) с использованием модели GP(s) и полосового фильтра H(s).
Следовательно, в дополнение к преимуществам (1)-(4), посредством использования модели GP(s), предварительно допущенной для F/F-операции и F/B-операции, вибрация тягового усилия в приводе на ведущие колеса может эффективно подавляться вследствие возмущающего крутящего момента во время передачи крутящего момента. Помимо этого, в течение разрывности передачи крутящего момента не допускается возникновение неожиданной вибрации или толчка вследствие ошибки F/F- и F/B-вычислений в течение разрывности передачи крутящего момента.
[0063] (6) Механизм определения имеет модуль 93 определения первой модели, который определяет завершение разрывности или прерывания передачи крутящего момента при тактировании, более раннем, чем опорное тактирование, при котором передаточная характеристика между входным крутящим моментом транспортного средства и скоростью вращения мотора фактически совпадает с предварительно допущенной моделью GP(s). Дополнительно, механизм определения имеет модуль 95 определения второй модели, который определяет завершение прерывания передачи крутящего момента при более позднем тактировании, чем опорное тактирование. Механизм подавления вибрации имеет модуль 94 переключения первого целевого крутящего момента, который начинает F/F-операцию или вычисление в ответ на завершение прерывания передачи крутящего момента посредством модуля 93 определения первой модели (определение включения), и модуль 96 переключения второго целевого крутящего момента, который начинает F/B-операцию в ответ на завершение прерывания передачи крутящего момента (определение включения) посредством модуля 95 определения второй модели.
Следовательно, помимо преимущества (5), поскольку F/F-операция выполняется в ответ на изменение крутящего момента установившегося состояния при тактировании, более раннем, чем тактирование, при котором передаточная характеристика между входным крутящим моментом транспортного средства и частотой вращения мотора фактически совпадает с моделью GP(s), может надежно предотвращаться вибрация, налагаемая вследствие изменения крутящего момента установившегося состояния при совпадении. Кроме того, вследствие начала F/B-операции до фактического совпадения может надежно предотвращаться ошибка F/B-операции посредством выполнения F/B-операции.
[0064] (7) Электроприводное транспортное средство (электромобиль), которое включает в себя электроприводной мотор (электромотор 1) в качестве источника мощности, который приводит в движение ведущие колеса 5, 5 посредством передачи крутящего момента через ведущий вал 4, 4, содержащее
- этап или процедуру управления режимом передачи крутящего момента для задания команды Tm крутящего момента мотора для электромотора 1 посредством суммирования первого целевого крутящего момента Tm*1 из F/F-операции и второго целевого крутящего момента Tm*2 из F/B-операции во время, когда передаточная характеристика GP(s) между входным крутящим моментом и частотой вращения мотора является согласованной с фактической передаточной характеристикой;
- этап или процедуру управления режимом прерывания крутящего момента для задания целевого крутящего момента Tm мотора для электромотора 1 посредством целевого крутящего момента Tm* установившегося состояния, определенного на основе запроса водителя в ходе сценария движения, в котором передаточная характеристика GP(s) между входным крутящим моментом и частотой вращения мотора не совпадает с фактической передаточной характеристикой, при прекращении F/F- и F/B-операций;
- этап или процедуру управления переходным режимом крутящего момента, на котором, после определения перехода из состояния отсутствия совпадения между моделью GP(s) передаточной характеристики между входным крутящим моментом и частотой вращения мотора и фактической передаточной характеристикой в состояние совпадения, F/F-операция в ответ на изменение крутящего момента установившегося состояния начинается заранее при более раннем тактировании фактического совпадения с предварительно допущенной моделью GP(s), чтобы определять первый целевой крутящий момент Tm*1 в качестве команды крутящего момента мотора, при этом F/B-операция начинается при более позднем тактировании фактического совпадения передаточной характеристики с предварительно допущенной моделью GP(s), чтобы задавать команду Tm крутящего момента мотора посредством суммирования предыдущего значения Tm*1 первого целевого крутящего момента и значения Tm*2 второго целевого крутящего момента.
Следовательно, можно предоставлять способ подавления вибрации для электроприводного транспортного средства (электромобиля), который подавляет неожиданную вибрацию или толчок, испытываемый во время разрывности передачи крутящего момента и в области начала передачи крутящего момента.
Второй вариант осуществления
[0065] Второй вариант осуществления относится к примеру, в котором значение команды крутящего момента мотора корректируется, чтобы подавлять колебание крутящего момента приведения в движение в области начала F/B-операции с использованием фильтра.
[0066] Сначала приводится описание конфигурации.
Фиг. 7 является блок-схемой управления, иллюстрирующей модуль 9b управления подавлением вибрации, включенный в контроллер 9 мотора во втором варианте осуществления. Далее описывается конфигурация модуля 9b управления демпфированием или подавлением вибрации на основе фиг. 7.
[0067] Как показано на фиг. 7, модуль 9 управления подавлением вибрации содержит модуль 91 F/F-вычисления (средство вычисления значения первого целевого крутящего момента), модуль 92 F/B-вычисления (средство вычисления значения второго целевого крутящего момента), модуль 93 определения первой модели (средство оценки), модуль 94 переключения первого целевого крутящего момента (средство подавления вибрации), модуль 95 определения второй модели (модуль оценки), модуль 95 определения второй модели (механизм определения), сумматор 97 (механизм задания значений команд крутящего момента мотора), модуль 98 коррекции значений команд крутящего момента мотора (средство коррекции значений команд крутящего момента мотора) и модуль 99 вычитания.
[0068] Модуль 98 коррекции значений команд крутящего момента мотора, после определения завершения прерывания передачи крутящего момента (определения включения) посредством модуля 95 определения второй модели, не корректирует значение Tm команды крутящего момента мотора в качестве ввода для вычисления оценки ωm# частоты вращения мотора посредством модуля 92 F/B-вычисления или операции. В дополнение к коррекции значения команды крутящего момента мотора, соответствующего конечному выходному крутящему моменту, для приложения к фактическому объекту GP'(s) таким образом, чтобы плавно связывать значение до и после начала F/B-операции, значение коррекции уменьшается до нуля в течение предварительно определенного периода времени.
[0069] Модуль 98 коррекции значений команд крутящего момента мотора содержит фильтр 98a, состоящий из второй идеальной модели Gm'(s) и модели GP(s), модуль 98b переключения коррекции, переключаемый в зависимости от результата определения из модуля 95 определения второй модели, модуль 98d хранения для сохранения только одной выборки значения Tm*2 второго целевого крутящего момента.
[0070] Фильтр 98 имеет характеристику, представленную посредством Gm'(s)/GP(s). Здесь, модель GP(s) указывает модель, представляющую передаточную характеристику между входным крутящим моментом транспортного средства и частотой ωm вращения мотора. Вторая идеальная модель Gm'(s) представляет модель, формулирующую целевую характеристику между входным крутящим моментом транспортного средства и частотой вращения мотора. Каждый раз, когда модуль 95 определения второй модели выполняет определение или оценку включения, предыдущее значение значения Tm*2 второго целевого крутящего момента инициализируется как состояние неограниченного числа вхождений. Следовательно, сразу после определения включения посредством модуля 95 определения второй модели должно выводиться предыдущее значение значения Tm*2 второго целевого крутящего момента. Тем не менее, после этого 0 Нм пропускается через фильтр 98a, и значение становится равным 0 Нм в установившемся состоянии.
[0071] Модуль 98b переключения коррекции является переключателем для переключения вывода на основе результата определения механизма 95 определения. После оценки выключения выводится 0 Нм, после оценки включения должен выводиться результат выполнения операции, пропущенный через фильтр 98a, содержащий характеристику Gm'(s)/GP(s).
[0072] Модуль 98d хранения имеет функцию, чтобы сохранять только одну выборку значения Tm*2 второго целевого крутящего момента, и выводит предыдущее значение значения Tm*2 второго целевого крутящего момента.
[0073] Модуль 99 вычитания вычисляет конечную команду управления крутящим моментом (Tm-Tm*3) для предоставления в фактический объект GP'(s) посредством вычитания значения Tm*3 коррекции крутящего момента, выводимого из модуля 98 коррекции команд крутящего момента мотора, из значения Tm команды крутящего момента мотора, выводимого из сумматора 97. Следует отметить, что, поскольку другие элементы (от модуля 91 F/F-операции до сумматора 97) являются идентичными элементам в первом варианте осуществления, их описание опускается, и идентичные ссылки с номерами присоединяются к соответствующим элементам.
[0074] Далее приводится описание работы.
Результат моделирования второго варианта осуществления описывается со ссылкой на фиг 8.
Соответствие или корреляция между каждой формой сигнала, показанной на фиг. 8, и формами сигнала на блок-схеме по фиг. 7 заключается в следующем:
"крутящий FF-момент"="значение Tm*1 первого целевого крутящего момента+значение Tm*3 коррекции крутящего момента"
"крутящий FB-момент"="значение Tm*2 второго целевого крутящего момента"
"конечный выходной крутящий момент""=Tm*1+Tm*2+значение Tm*3 коррекции крутящего момента"
[0075] Далее приводится описание начала операции, показанной на фиг. 8 (пример сценария движения). Также добавлен пример без коррекции крутящего момента в первом варианте осуществления для сравнения.
Условие
Время Tma, в которое передаточные характеристики относительно входного крутящего момента для частоты вращения мотора фактически совпадают с моделью GP(s) транспортного средства: 0,1 [с]
Время Tin ввода значения целевого крутящего момента установившегося состояния: 0,3 [с]
Время Tff начала F/F-операции (время при решении относительно существенного совпадения): 0,0 [с]
Время Tfb начала F/B-операции (время при решении относительно точного совпадения): 0,6 [с] (сплошная линия)
F/B-операция в первом варианте осуществления (пунктирная линия)
Описание
В первом и втором вариантах осуществления, как показано в характеристике в форме пунктирной линии и характеристике в форме сплошной линии, указываемой посредством стрелки F на фиг. 8, сразу после начала F/B-операции должен выводиться крутящий F/B-момент, необязательный для того, чтобы подавлять вибрацию. Следовательно, в случае первого варианта осуществления, как показано в характеристике в форме пунктирной линии посредством стрелки G на фиг. 8, крутящий момент приведения в движение колеблется. Тем не менее, в случае второго варианта осуществления, как показано в характеристике в форме сплошной линии посредством стрелки E на фиг. 8, должен выводиться корректирующий крутящий момент Tm*3, который отменяет необязательный крутящий F/B-момент, в дополнение к выходному крутящему FF-моменту. Следовательно, как показано в характеристике в форме сплошной линии, указываемой посредством стрелки G на фиг. 8, по сравнению с характеристикой крутящего момента приведения в движение (характеристикой в форме пунктирной линии) в первом варианте осуществления, крутящий момент приведения в движение может быть близким к идеальному состоянию. Следует отметить, что другие преимущества являются идентичными преимуществам в первом варианте осуществления, их описание тем самым пропускается.
[0076] Далее приводится описание технических преимуществ.
В аппаратной системе управления подавлением вибрации для электромобиля во втором варианте осуществления могут достигаться следующие преимущества.
[0077] (8) Когда модуль 95 определения второй модели определяет то, что условие восстановления удовлетворяется, команда Tm крутящего момента мотора не корректируется, что служит в качестве ввода для того, чтобы вычислять оценку ωm# частоты вращения мотора посредством модуля вычисления второго целевого крутящего момента (модуля 92 F/B-операции), но команда крутящего момента мотора, соответствующая конечному выходному крутящему моменту, который должен быть введен в фактический объект GP'(s), корректируется, чтобы плавно связывать значение до и после F/B-операции. Помимо этого, предоставляется механизм коррекции команд крутящего момента мотора (модуль 98 коррекции команд крутящего момента мотора), чтобы снижать значение Tm*3 коррекции крутящего момента до нуля в пределах предварительно определенного периода времени.
Следовательно, помимо преимущества (6) в первом варианте осуществления, за счет плавного связывания значения Tm команды крутящего момента мотора до и после начала F/B-операции, отменяется вывод этапа формирования значения Tm2 второго целевого крутящего момента (т.е. крутящего F/B-момента) сразу после начала F/B-операции. Кроме того, посредством снижения значения Tm*3 коррекции крутящего момента до нуля в течение предварительно определенного времени может предотвращаться возникновение отклонения установившегося крутящего момента.
[0078] (9) Механизм коррекции команд крутящего момента мотора (модуль 98 коррекции команд крутящего момента мотора) содержит фильтр 98a со второй идеальной моделью Gm'(s) между предварительно допущенным входным крутящим моментом и частотой вращения мотора и моделью GP(s). Каждый раз, когда модуль 95 определения второй модели определяет то, что условие восстановления удовлетворяется для определения включения, сразу после определения выводится предыдущее значение посредством инициализации посредством предыдущего значения для значения Tm*2 второго целевого крутящего момента и, после инициализации, пропускания "нулевого" ввода через фильтр 98, тем самым этап конечного выходного крутящего момента может быть отменен при недопущении этапа формирования крутящего момента на установившейся основе.
Другими словами, посредством инициализации значения Tm*2 второго целевого крутящего момента (и вывода предыдущего значения) сразу после определения включения и предоставления возможности пропускания "нулевого" ввода через фильтр 98a после инициализации, относительно коррекции Tm3 крутящего момента, FF-операция осуществляется с возможностью отменять этап крутящего FB-момента посредством крутящего FF-момента. Помимо этого, при формировании полосового фильтра с передаточной характеристикой H(s), второй целевой крутящий момент Tm*2 постоянно является нулевым в установившемся состоянии.
Третий вариант осуществления
[0079] Третий вариант осуществления является примером, в котором значение команды крутящего момента мотора корректируется, чтобы подавлять колебание крутящего момента приведения в движение в начале F/B-операции посредством использования модуля ограничения скорости изменения.
[0080] Сначала приводится описание конфигурации.
Фиг. 9 является блок-схемой управления, иллюстрирующей модуль 9b управления подавлением вибрации, включенный в контроллер 9 мотора третьего варианта осуществления. Далее описывается конфигурация модуля 9b управления подавлением вибрации на основе фиг. 9.
[0081] Как показано на фиг. 9, модуль 9b подавления вибрации содержит модуль 91 F/F-операции (средство вычисления первого целевого крутящего момента), модуль 92 F/B-операции (модуль вычисления второго целевого крутящего момента), модуль 93 определения первой модели (средство оценки), модуль 94 переключения первого целевого крутящего момента (средство подавления вибрации), механизм 95 определения второй модели (средство оценки), модуль 96 переключения второго целевого крутящего момента (средство подавления вибрации), сумматор 97 (средство задания значений команд крутящего момента мотора), модуль 98' коррекции значений команд крутящего момента мотора (средство коррекции значений команд крутящего момента мотора) и модуль 99 вычитания.
[0082] Аналогично второму варианту осуществления, модуль 98' коррекции значений команд крутящего момента мотора не выполняет коррекцию значения Tm команды крутящего момента мотора, служащего в качестве ввода для того, чтобы вычислять оценку ωm# частоты вращения мотора посредством модуля 92 F/B-операции, после определения (оценки включения) посредством модуля 95 определения второй модели завершения разрывности или прерывания передачи крутящего момента. Вместо этого значение команды крутящего момента мотора, соответствующее конечному выходному крутящему моменту для введения в фактический объект GP'(s), корректируется для плавного подключения до и после F/B-операции с постепенным снижением значения коррекции до нуля в течение предварительно определенного времени.
[0083] Модуль 98' коррекции значений команд крутящего момента мотора содержит модуль 98c ограничения скорости изменения, модуль 98b переключения коррекции для переключения в ответ на результат оценки из модуля 95 определения второй модели и модуль 98d хранения для сохранения только одной выборки значения Tm*2 второго целевого крутящего момента.
[0084] Модуль 98c ограничения скорости изменения выполняет ограничение посредством скорости изменения, предварительно заданной таким образом, чтобы не вызывать вибрацию. Каждый раз, когда модуль 95 определения второй модели выполняет определение включения посредством инициализации посредством предыдущих данных значения Tm*2 второго целевого крутящего момента, предыдущее значение второго целевого крутящего момента Tm*2 выводится сразу после определения включения посредством модуля 95 определения второй модели, после этого выводится значение после пропускания "нуля" Нм через модуль ограничения скорости изменения с достижением 0 Нм в установившемся состоянии.
Следует отметить, что другие конфигурации являются идентичными конфигурациям в первом и втором вариантах осуществления, их описание, следовательно, опускается, и присоединяются идентичные ссылки с номерами, соответствующие конфигурации. Помимо этого, касательно работы третьего варианта осуществления, поскольку она является почти идентичной работе во втором варианте осуществления, ее описание пропускается.
[0085] Далее приводится описание технических преимуществ.
В аппаратной системе управления подавлением вибрации для электромобиля третьего варианта осуществления могут достигаться следующие преимущества.
[0086] (10) Модуль коррекции команд крутящего момента мотора (модуль 98' коррекции значений команд крутящего момента мотора) содержит модуль 98c ограничения скорости изменения, который выполняет ограничение посредством предварительно заданной скорости изменения таким образом, чтобы не вызывать вибрацию. Каждый раз модуль 95 определения второй модели определяет то, что условие восстановления удовлетворяется (оценка включения), посредством инициализации посредством предыдущего значения для значения Tm*2 второго целевого крутящего момента и вывода предыдущего значения сразу после суждения и, после инициализации, задания значения посредством пропускания нулевого ввода через модуль 98c ограничения скорости изменения.
Следовательно, помимо преимущества (8) во втором варианте осуществления, посредством предоставления возможности F/F-операции воздействовать на значение Tm*3 коррекции крутящего момента из значения Tm команды крутящего момента мотора без наложения вибрации, этап конечного выходного крутящего момента может быть отменен, и может предотвращаться возникновение непрерывного отклонения крутящего момента.
Другими словами, посредством инициализации второго целевого крутящего момента Tm*2 сразу после определения включения и, после инициализации, посредством получения значения, получаемого посредством пропускания нулевого ввода через модуль 98c ограничения скорости изменения, относительно значения Tm*3 коррекции, модуль FF-операции работает с возможностью уравновешивать этап крутящего FB-момента посредством крутящего FF-момента. Помимо этого, при формировании передаточной характеристики H(s) посредством полосового фильтра, второй целевой крутящий момент Tm*2 становится равным 0 Нм в установившемся состоянии.
[0087] Система подавления вибрации для электроприводного транспортного средства согласно настоящему изобретению описана в отношении первого-третьего вариантов осуществления. Конкретная конфигурация не ограничена этими вариантами осуществления, и конструктивные модификации и дополнения разрешаются без отступления от сущности изобретения, согласованной с объемом каждого пункта формулы изобретения.
[0088] В первом-третьем вариантах осуществления пример варианта применения показывается относительно электромобиля, оснащенного электромотором 1 и ступенчатой трансмиссией 2. Тем не менее, такой пример также может быть применимым к электромобилю, оснащенному электромотором и редукционным механизмом. Помимо этого, в случае электроприводных транспортных средств, вариант применения также применим к гибридному электромобилю, транспортному средству на топливных элементах и т.п.
Перекрестная ссылка на родственную заявку
[0089] Эта настоящая заявка притязает на приоритет заявки на патент 2010-166207, поданной в патентное бюро (Япония) 23 июля 2010 года, все раскрытие сущности которой полностью содержится в данном документе по ссылке.
Изобретение относится к области транспорта и может быть использовано в электроприводном транспортном средстве для подавления вибраций. Технический результат - подавление или демпфирование неожиданных вибраций или толчков во время прерывания в передаче крутящего момента. Электромобиль, имеющий электромотор (1) в качестве своего источника мощности, содержит модуль (91) F/F-вычисления или операции, модуль (92) F/B-вычисления или операции, сумматор (97), модули (93, 95) определения модели и модули (94, 96) переключения значений целевого крутящего момента. Модуль (91) F/F-вычисления вычисляет значение (Tm*1) первого целевого крутящего момента посредством F/F-операции. Модуль (92) F/B-вычисления вычисляет значение (Tm*2) второго целевого крутящего момента посредством F/B-операции с использованием модели (GP(s)). Сумматор (97) суммирует значение (Tm*1) первого целевого крутящего момента и значение (Tm*2) второго целевого крутящего момента, чтобы получать значение (Tm) команды крутящего момента мотора. Модули (93, 95) определения модели оценивают то, возникает или нет прерывание в передаче крутящего момента на ведущие валы (4). Модули (94, 96) переключения значений целевого крутящего момента прекращают F/F- и F/B-операции, когда подтверждается прерывание передачи крутящего момента. 2 н. и 8 з.п. ф-лы, 9 ил.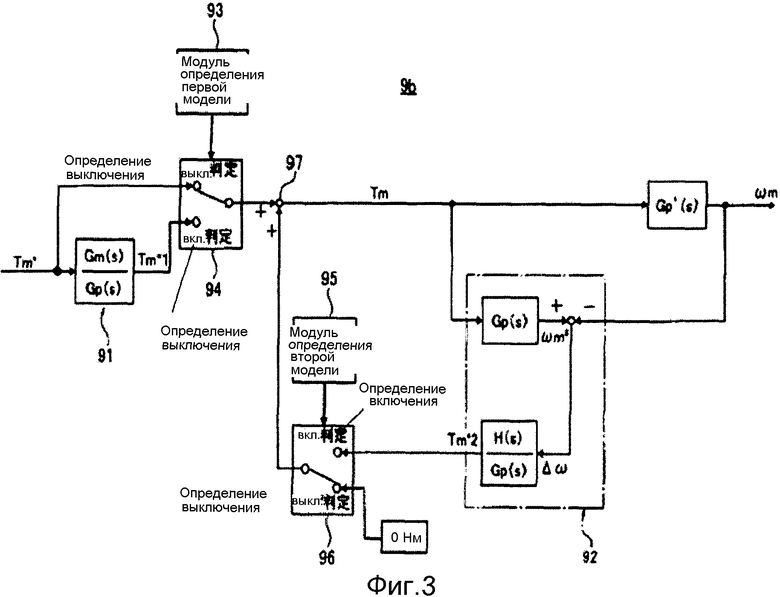
1. Система подавления вибрации для электроприводного транспортного средства, имеющего электроприводной мотор в качестве источника мощности, содержащая
- детектор частоты вращения для обнаружения частоты вращения мотора;
- модуль вычисления целевого крутящего момента мотора для вычисления значения целевого крутящего момента мотора в ответ на запрос водителя;
- модуль вычисления первого целевого крутящего момента для вычисления первого целевого крутящего момента посредством операции с прямой связью (F/F) с использованием передаточной характеристики между входным крутящим моментом и частотой вращения мотора в ответ на значение целевого крутящего момента мотора;
- модуль вычисления второго целевого крутящего момента для вычисления второго целевого крутящего момента посредством операции с обратной связью (F/B) с использованием передаточной характеристики между входным крутящим моментом и частотой вращения мотора на основе частоты вращения мотора;
- механизм задания команд крутящего момента мотора посредством суммирования первого целевого крутящего момента и второго целевого крутящего момента, чтобы получать значение команды крутящего момента мотора для мотора;
- механизм определения, чтобы определять то, совпадает или нет модель Gp(s) передаточной характеристики между входным крутящим моментом и частотой вращения мотора с фактической передаточной характеристикой; и
- механизм подавления вибрации для задания целевого крутящего момента мотора в качестве команды крутящего момента мотора в течение периода времени, в который передаточная характеристика между входным крутящим моментом и частотой вращения мотора не определяется как совпадающая с фактической передаточной характеристикой, при прекращении F/F-операции первого целевого крутящего момента с использованием модуля вычисления первого целевого крутящего момента и F/B-операции второго целевого крутящего момента с использованием механизма вычисления второго целевого крутящего момента.
2. Система подавления вибрации для электроприводного транспортного средства по п.1, в которой
- механизм подавления вибрации вычисляет команду крутящего момента мотора после определения удовлетворения условия восстановления посредством начала F/F-операции первого целевого крутящего момента с использованием модуля вычисления первого целевого крутящего момента до F/B-операции второго целевого крутящего момента с использованием модуля вычисления второго целевого крутящего момента.
3. Система подавления вибрации для электроприводного транспортного средства по п.1, в которой
- механизм определения определяет то, что передаточная характеристика между входным крутящим моментом и частотой вращения мотора не является согласованной с фактической передаточной характеристикой, когда абсолютное значение разности между угловой скоростью мотора и угловой скоростью ведущего колеса превышает предварительно определенное значение.
4. Система подавления вибрации для электроприводного транспортного средства по п.2, в которой
- механизм определения определяет то, что условие восстановления удовлетворяется, когда абсолютное значение разности между угловой скоростью мотора и угловой скоростью ведущего колеса находится в пределах предварительно определенного значения.
5. Система подавления вибрации для электроприводного транспортного средства по любому из пп.1-4, в которой
- модуль вычисления первого целевого крутящего момента принимает целевой крутящий момент установившегося состояния, определенный на основе запроса водителя, и вычисляет первый целевой крутящий момент посредством пропускания F/F-операции через фильтр с использованием идеальной модели передаточной характеристики между входным крутящим моментом и частотой вращения мотора и модели, и
- модуль вычисления второго целевого крутящего момента вычисляет оценку частоты вращения мотора из модели передаточной характеристики между входным крутящим моментом для транспортного средства и частотой вращения мотора, принимает разность между оценкой частоты вращения мотора и обнаруженным значением частоты вращения мотора и вычисляет второй целевой крутящий момент посредством пропускания F/B-операции через фильтр с использованием модели и полосового фильтра.
6. Система подавления вибрации для электроприводного транспортного средства по п.5, в которой
- механизм определения имеет модуль определения первой модели, который определяет завершение прерывания передачи крутящего момента при тактировании, более раннем, чем опорное тактирование, при котором передаточная характеристика между входным крутящим моментом транспортного средства и частотой вращения мотора фактически совпадает с предварительно допущенной моделью, и модуль определения второй модели, который определяет завершение прерывания передачи крутящего момента при более позднем тактировании, чем опорное тактирование, и при этом
- механизм подавления вибрации имеет модуль переключения первого целевого крутящего момента, который начинает F/F-операцию в ответ на завершение прерывания передачи крутящего момента посредством модуля определения первой модели, и модуль переключения второго целевого крутящего момента, который начинает F/B-операцию в ответ на завершение прерывания передачи крутящего момента посредством модуля определения второй модели.
7. Система подавления вибрации для электроприводного транспортного средства по п.6, в которой
- когда модуль определения второй модели определяет то, что условие восстановления удовлетворяется, команда крутящего момента мотора не корректируется, что служит в качестве ввода для того, чтобы вычислять оценку частоты вращения мотора посредством модуля вычисления второго целевого крутящего момента, но команда крутящего момента мотора, соответствующая конечному выходному крутящему моменту, который должен быть введен в фактический объект, корректируется для плавного подключения до и после F/B-операции при снижении значения коррекции крутящего момента до нуля в пределах предварительно определенного периода времени.
8. Система подавления вибрации для электроприводного транспортного средства по п.7, в которой
- механизм коррекции команд крутящего момента мотора содержит фильтр со второй идеальной моделью между предварительно допущенным входным крутящим моментом и частотой вращения мотора и упомянутой моделью, и при этом
- каждый раз, когда модуль определения второй модели определяет то, что условие восстановления удовлетворяется, сразу после определения выводится предыдущее значение посредством инициализации посредством предыдущего значения для значения второго целевого крутящего момента и, после инициализации, пропускания "нулевого" ввода через фильтр.
9. Система подавления вибрации для электроприводного транспортного средства по п.7, в которой
- модуль коррекции команд крутящего момента мотора содержит модуль ограничения скорости изменения, который выполняет ограничение посредством предварительно заданной скорости изменения таким образом, чтобы не вызывать вибрацию, и при этом
- каждый раз модуль определения второй модели определяет то, что условие восстановления удовлетворяется, посредством инициализации посредством предыдущего значения для значения второго целевого крутящего момента и вывода предыдущего значения сразу после суждения и, после инициализации, задания значения посредством пропускания нулевого ввода через модуль ограничения скорости изменения.
10. Способ подавления вибрации для электроприводного транспортного средства, которое включает в себя электроприводной мотор в качестве источника мощности, который приводит в движение ведущие колеса посредством передачи крутящего момента через ведущий вал, содержащий
- этап управления режимом передачи крутящего момента, на котором задают команду крутящего момента мотора для электромотора посредством суммирования значения первого целевого крутящего момента F/F-операции и значения второго целевого крутящего момента F/B-операции в течение времени, в которое передаточная характеристика между входным крутящим моментом и частотой вращения мотора является согласованной с фактической передаточной характеристикой;
- этап управления режимом прерывания крутящего момента, на котором задают целевой крутящий момент мотора для электромотора посредством целевого крутящего момента установившегося состояния, определенного на основе запроса водителя в ходе сценария движения, в котором передаточная характеристика между входным крутящим моментом и частотой вращения мотора не совпадает с фактической передаточной характеристикой, при прекращении F/F- и F/B-операций;
- этап управления переходным режимом крутящего момента, на котором, после определения перехода из состояния отсутствия совпадения между моделью передаточной характеристики между входным крутящим моментом и частотой вращения мотора и фактической передаточной характеристикой в состояние совпадения, F/F-операция в ответ на изменение крутящего момента установившегося состояния начинается при более раннем тактировании фактического совпадения с предварительно допущенной моделью, чтобы задавать первый целевой крутящий момент в качестве команды крутящего момента мотора, при начале F/B-операции при более позднем тактировании фактического совпадения передаточной характеристики с предварительно допущенной моделью, чтобы задавать команду крутящего момента мотора посредством суммирования значения первого целевого крутящего момента с предшествующей F/F-операции, и значения второго целевого крутящего момента.
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПОДВИЖНЫМ СОСТАВОМ | 2000 |
|
RU2179515C2 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| JP 3508742 B2, 22.03.2004 | |||
| US 6756758 B2, 29.08.2004 | |||
| US 2010009495 A1,15.04.2010 | |||
| DE 10146976 A1, 11.07.2002 | |||
| Оболочка для сыпучего заполнителя при пневмоиспытаниях сосудов | 1984 |
|
SU1223071A1 |

