Настоящее изобретение относится к электродинамическому тормозу для универсального электродвигателя согласно п.1 формулы изобретения.
Электродинамические тормоза известны в самых разнообразных вариантах их исполнения.
В DE 3825835 А1 описан электрический тормоз для электродвигателя последовательного возбуждения, который имеет обмотку возбуждения, якорь и электрическую схему с импульсно-фазовым управлением и у которого при работе в режиме торможения обмотка возбуждения запитывается от сети, а якорь замкнут накоротко. Такой тормоз предназначен для центрифуги и должен поддерживать тормозящий вращающий момент постоянным во всем диапазоне частот вращения. Тормозящий вращающий момент регулируется управляющим устройством в зависимости от частоты вращения, при этом в обмотке возбуждения электродвигателя создается ток, обратно пропорциональный частоте вращения вала электродвигателя. Помимо этого при работе в режиме торможения последовательно с якорем включен тормозной резистор.
В ЕР 0721694 В1 описан электродинамический тормоз для электродвигателя, имеющий последовательно включенный в цепь главного тока электродвигателя регулятор (4) мощности, блок (5) управления, который соединен со входом регулятора мощности и который при работе в двигательном режиме или в режиме торможения управляет через один и тот же регулятор мощности током электродвигателя, и первый переключатель (13) для якоря (1) электродвигателя, параллельно каковому якорю включен второй переключатель (14), который при работе в двигательном режиме размыкает, а при работе в режиме торможения замыкает образованную его первым контактом (9, 10) и якорем электрическую цепь и который имеет еще один контакт (9, 11), который при работе в двигательном режиме соединяет управляющий вход блока (5) управления с сетевым зажимом (Р), а в режиме торможения разрывает такое соединение. При реализации подобного решения тормозной ток должен определяться тормозным резистором (15), а магнитное поле для создания тормозящего момента возбуждается отбираемым из сети током возбуждения, который при работе в режиме торможения должен представлять собой пульсирующий постоянный ток, для чего пропускается только каждая вторая полуволна. В указанной публикации говорится, что блок (5) управления регулирует тормозной ток в соответствии с заданной характеристикой изменения тока возбуждения и/или определяет тормозной ток и поддерживает его постоянным путем регулирования тока возбуждения.
В DE 10234397 А1 описан электродвигатель последовательного возбуждения с тормозом и способ торможения такого электродвигателя, который в двигательном режиме работает как обычный электродвигатель последовательного возбуждения, при этом предусмотрены средства для переключения в режим торможения, обеспечивающие возможность шунтирования якоря и возможность независимого возбуждения обмотки возбуждения напряжением сети, в результате чего двигатель для его торможения переводится на работу в режиме генератора постоянного тока независимого возбуждения.
В DE 2842145 описана электрическая схема для электрического торможения универсальных электродвигателей. При выключении двигательного режима инициируется режим торможения, при этом обмотка возбуждения продолжает запитываться от сети, а якорь либо замкнут накоротко, либо запитывается противотоком, и после остановки двигателя он отсоединяется от сети выключателем с выдержкой времени.
В DE 10317636 А1 описан тормоз для универсального электродвигателя, имеющий короткозамыкатель (30) (симистор), предназначенный для замыкания накоротко обмотки (18) якоря при работе в режиме торможения и имеющий для определения своего коммутационного положения управляющий вход, который соединен с блоком (28) управления в целях импульсно-фазового управления этим короткозамыкателем (30) при работе в режиме торможения во избежание искрения под щетками.
Известные электродинамические тормоза не вполне пригодны для применения по предусмотренному назначению.
Исходя из вышеизложенного в основу настоящего изобретения была положена задача разработать эффективный и недорогой электродинамический тормоз для универсального электродвигателя, каковой тормоз позволял бы добиться эффективного торможения при меньшем искрении под щетками и малом их износе и благодаря соответствующей электрической схеме обеспечивал бы надежную контролируемую работу в режиме торможения и в двигательном режиме для возможности его применения в оснащенной опасным инструментом машине.
Указанная задача решается с помощью электродинамического тормоза, заявленного в п.1 формулы изобретения. Различные возможные варианты осуществления изобретения представлены в зависимых пунктах формулы изобретения и более детально рассмотрены в последующем описании.
Преимущества изобретения состоят прежде всего в том, что без перемены полярности обмотки возбуждения или якоря достигается плавное и быстрое торможение универсального электродвигателя при длительном сроке службы щеток. Якорь при работе в режиме торможения замкнут накоротко, а обмотка возбуждения путем специального управления при работе в режиме торможения возбуждается сетевым током. Плавное и быстрое торможение достигается преимущественно благодаря использованию простого аппаратного обеспечения и специального программного обеспечения, чем обусловлена низкая стоимость электродинамического тормоза. Искрение на коллекторе якоря при работе в режиме торможения уменьшается прежде всего благодаря тому, что в контроллер управляющей электроники заложена программа, подавляющая вредное повышенное искрение на коллекторе.
Тормоз имеет далее устройства для надежного распознавания двигательного режима и режима торможения, а также для контроля эксплуатационной надежности управляющей электроники и электрической схемы.
Ниже изобретение более подробно рассмотрено со ссылкой на прилагаемые к описанию чертежи, на которых показано:
на фиг. 1-4 - электрические схемы электродинамического тормоза для универсального электродвигателя и
на фиг. 5-10 - символические графические изображения, диаграммы и сигналограммы в виде характеристики изменения тока/напряжения в/на обмотке возбуждения при работе в режиме торможения.
Электрические ручные машины, оснащенные опасным инструментом, такие как ручные дисковые пилы и ручные угловые шлифовальные машины, в настоящее время для их торможения и остановки оборудуют механическим или электронным тормозом. Недостаток механического тормоза состоит прежде всего в том, что он подвержен значительному износу и поэтому требует более или менее периодического технического обслуживания, а существенный недостаток известных в настоящее время электронных тормозов состоит в том, что в обычно используемых универсальных электродвигателях их щетки и коллектор при работе в режиме торможения подвержены высокому износу.
На фиг. 1-4 показаны электрические схемы для универсального электродвигателя, позволяющие выполнять зависимое от сети торможение коротким замыканием без сколько-нибудь существенного износа щеток.
На фиг. 1 показана электрическая схема, в которой первый вывод для подключения к сети ведет к обеспечивающему работу в двигательном режиме контакту а первого переключателя S1, с которым соединен первый вывод якоря 1, второй вывод которого соединен с первым выводом обмотки 2 возбуждения, между вторым выводом которой и вторым выводом для подключения к сети включен симистор 3 (симметричный триодный тиристор, или триак). Второй вывод якоря 1 и первый вывод обмотки 2 возбуждения соединены с обеспечивающим работу в режиме торможения контактом b второго переключателя S2 и с обеспечивающим работу в режиме торможения контактом с первого переключателя S1, при этом второй переключатель S2 перемычкой 4 соединен с контактом а первого переключателя S1. Распознающий контакт d второго переключателя S2 соединен линией 6 с управляющей электроникой 5. Для обеспечения надежного переключения с работы в двигательном режиме на работу в режиме торможения переключатели S1, S2 обладают задержкой переключения, равной по меньшей мере времени полупериода сетевого напряжения. Якорь 1 в данном случае с одной своей стороны последовательно соединен с обмоткой возбуждения. Помимо этого якорь 1 может быть также включен в цепь между частями обмотки возбуждения, одна часть 2' которой при этом соединена непосредственно с сетью. Для обеспечения работы в регулируемом режиме торможения в данном случае предусмотрен шунт 7, а на случай отказа электронного устройства последовательно с обмоткой 2 возбуждения при работе в режиме торможения может быть включен предохранитель 8. В показанной на фиг.1 электрической схеме может быть также предусмотрен только второй переключатель S2, и в этом случае универсальный электродвигатель будет с одной стороны соединен непосредственно с сетью, а необходимость в первом переключателе S1 тем самым отпадет. По соображениям обеспечения безопасности предохранитель 8 в этом случае должен быть соединен последовательно с универсальным электродвигателем.
Подобный электродинамический тормоз работает следующим образом. При необходимости включения двигательного режима первый переключатель S1 замкнут на обеспечивающий работу в двигательном режиме контакт а, а второй переключатель S2 замкнут на распознающий контакт d. В подобном коммутационном положении переключателей универсальный электродвигатель активизирован на работу в двигательном режиме и преимущественно плавно разгоняется до своей номинальной частоты вращения. При выключении двигателя первый переключатель S замыкается на обеспечивающий работу в режиме торможения контакт с, а второй переключатель S2 замыкается на обеспечивающий работу в режиме торможения контакт b. В этом случае обмотка 2 возбуждения оказывается соединена непосредственно через симистор 3 с сетью, а якорь оказывается замкнут накоротко через обеспечивающий работу в режиме торможения контакт с первого переключателя S1 и через перемычку. При размыкании распознающего контакта d второго переключателя S2 контроллер управляющей электроники 5 активизирует программу для режима торможения, по которой управление симистором 3 происходит таким образом, что через обмотку 2 возбуждения протекает ток заданного уровня. Под действием приложенного к статору поля вращающийся короткозамкнутый якорь 1 соответственно возбуждается. Таким путем на обмотку 2 возбуждения по программе, заложенной в контроллер управляющей электроники 5, подается напряжение с обеспечением минимального искрения под щетками и с достижением максимально эффективного торможения.
В том случае, когда надежное переключение с работы в двигательном режиме на работу в режим торможения должно обеспечиваться аппаратным выключателем с переключателями без задержки переключения, а якорь при этом должен с обеих сторон механически отсоединяться от сети, для этого необходимы три симистора.
Электрическая схема, реализующая подобный вариант, показана на фиг.2. В такой схеме первый симистор v соединен с первым выводом для подключения к сети и с обеспечивающим работу в двигательном режиме контактом е первого переключателя S3, с которым соединен первый вывод якоря 1, второй вывод которого соединен с распознающим контактом f второго переключателя S4 и с обеспечивающим работу в режиме торможения контактом g первого переключателя S3, при этом распознающий контакт f одновременно является также обеспечивающим работу в двигательном режиме контактом. Один из выводов обмотки 2 возбуждения соединен со вторым переключателем S4, а другой ее вывод подсоединен ко второму выводу для подключения к сети, при этом второй симистор v' соединен с обеспечивающим работу в режиме торможения контактом h второго переключателя S4 и с первым выводом для подключения к сети. При использовании такой электрической схемы якорь при работе в режиме торможения и при отключенном двигательном режиме с обеих сторон механически отсоединен от сети переключателями S3, S4. Однако надежное переключение с работы в двигательном режиме на работу в режиме торможения при этом не обеспечивается, поскольку в последний полупериод сетевого напряжения при работе в двигательном режиме непосредственно в обмотке возбуждения может протекать ток через электрическую дугу, образующуюся на контактах переключателей, и через короткозамыкающую перемычку w якоря, и поэтому первый симистор v до следующего прохождения через нуль остается открытым, в результате чего через обмотку возбуждения протекает ток большой силы, который приводит к образованию значительной электрической дуги на коллекторе короткозамкнутого якоря и который может также вызывать через обмотку возбуждения срабатывание сетевого предохранителя. Электрическая дуга на коммутирующих контактах аппаратного выключателя гаснет только при следующем прохождении переменным напряжением через нуль. Поэтому для исключения возможности протекания тока непосредственно через обмотку возбуждения в последний полупериод сетевого напряжения при работе в двигательном режиме и при переключении на работу в режиме торможения предусмотрен третий симистор. Такой симистор v" включен в короткозамыкающую перемычку w якоря.
Из приведенного на фиг.2 изображения электрической схемы следует, что после переключения с работы в двигательном режиме на работу в режиме торможения якорь 1 с обеих сторон отсоединяется от сети двумя переключателями S3, S4, а обмотка 2 возбуждения по окончании работы в режиме торможения отсоединяется от сети вторым симистором v'.
Полное отсоединение якоря 1 от сети после переключения на работу в режиме торможения может также происходить при наличии только одного симистора. Для этого необходим двухполюсный коммутационный аппарат, снабженный переключателями с задержкой переключения, равной по меньшей мере времени полупериода сетевого напряжения.
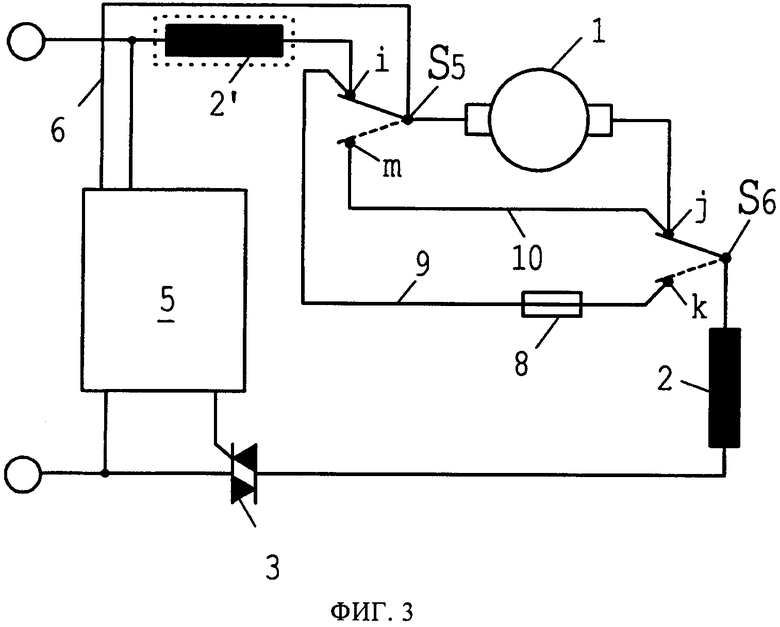
Электрическая схема, реализующая подобный вариант, показана на фиг.3. В такой схеме один из выводов для подключения к сети ведет к обеспечивающему работу в двигательном режиме контакту i первого переключателя S5, с которым соединен один из выводов якоря 1, другой вывод которого соединен с обеспечивающим работу в двигательном режиме контактом j второго переключателя S6, с которым соединен один из выводов обмотки 2 возбуждения, другой вывод которой через симистор 3 соединен с другим выводом для подключения к сети. Обеспечивающий работу в режиме торможения контакт к второго переключателя S6 соединен через перемычку 9 с обеспечивающим работу в двигательном режиме контактом i первого переключателя S5, а обеспечивающий работу в двигательном режиме контакт j второго переключателя S6 соединен через перемычку 10 с обеспечивающим работу в режиме торможения контактом m первого переключателя S5. Соединительная линия 6 управляющей электроники 5 для распознавания коммутационного положения в данном случае подсоединена к переключателю S5. Якорь 1 с одной стороны последовательно соединен с обмоткой 2 возбуждения или включен между частями обмотки возбуждения, при этом в последнем случае одна ее часть 2' непосредственно соединена с сетью.
В показанных на фиг.1-3 вариантах обмотка возбуждения у универсального электродвигателя в выключенном положении аппаратного выключателя отделена от сети только одним симистором. Повысить эксплуатационную надежность можно, дополнительно предусмотрев также возможность механического отсоединения универсального электродвигателя от сети.
На фиг.4 показана реализующая подобный вариант электрическая схема, в которой предусмотрен выключатель S7, который по завершении работы в режиме торможения разрывает подключение к сети. В данном случае якорь 1 с одной стороны последовательно соединен с обмоткой 2 возбуждения, а параллельно якорю 1 включен переключатель S8, при этом такой переключатель S8 и один из выводов якоря соединены с одним из выводов для подключения к сети, обеспечивающий работу в режиме торможения контакт n переключателя S8 соединен с другим выводом якоря и с одним из выводов обмотки возбуждения и тем самым подсоединен к точке 11 ответвления, а распознающий контакт о переключателя S8 соединен соответствующей линией с управляющей электроникой 5. К двигателю дополнительно подключен симистор 3. Для регулирования двигателя и в данном случае в электрическую цепь включен шунт 7, а для обеспечения эксплуатационной надежности при работе в режиме торможения предусмотрен предохранитель 8. Переключатель S8 обладает задержкой переключения, равной по меньшей мере времени полупериода, а выключатель S7 для отключения от сети обладает задержкой переключения, равной по меньшей мере времени работы в режиме торможения.
С целью обеспечить электродинамическим тормозом быстрое и плавное торможение универсального электродвигателя, у которого при работе в режиме торможения обмотка возбуждения находится под сетевым напряжением, а обмотка якоря замкнута накоротко, для контроллера управляющей электроники предусмотрена строго определенная программа. При использовании подобного тормоза необходимо учитывать, что при подаче тока переменного напряжения на обмотку возбуждения приложенное к статору поле не синхронно с наводимым на якоре полем. Величина сдвига между одним и другим полями зависит от многих факторов. С целью компенсировать временной сдвиг поля на якоре в цепь торможения включают, например, тормозные резисторы. Однако тормозной резистор для возможности проявления им своего действия в полной мере должен допускать возможность регулируемого изменения его сопротивления. В принципе, однако, универсальные электродвигатели, используемые в электрических ручных машинах, не оснащают подобными дополнительными компонентами из-за отсутствия пространства для их размещения и из-за слишком высокого привносимого ими стоимостного фактора.
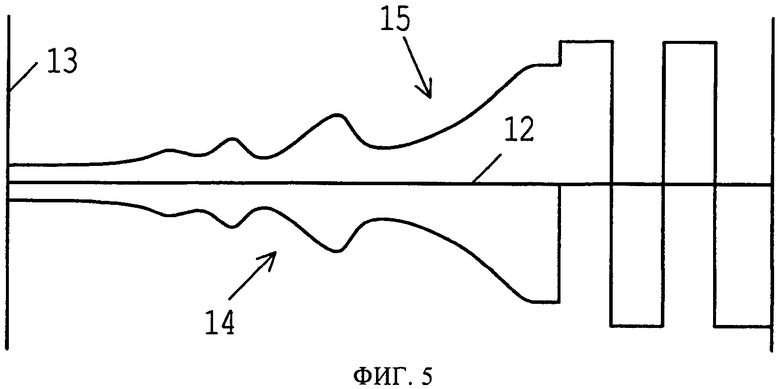
Согласно изобретению задача по обеспечению приблизительной синхронности полей статора и якоря решается с помощью специальной управляющей электроники. Подобный подход более подробно поясняется ниже со ссылкой на символические графические изображения, диаграммы и сигналограммы. На фиг.5-7 прохождение переменным сетевым напряжением через нуль обозначено сплошной линией 12, а уровень тока, потребляемого обмоткой возбуждения при работе в режиме торможения, в каждом случае представлен сбоку от этой линии 12.
На фиг.5 приведено символическое графическое изображение характеристики изменения тока в обмотке возбуждения при работе в режиме торможения и при управлении симистором начиная с большого угла его отпирания с последующим непрерывным и равномерным уменьшением этого угла отпирания симистора. В начале 13 работы в режиме торможения через обмотку возбуждения протекает малый ток возбуждения, который затем слегка возрастает и который на последующем первом участке 14 волнообразно возрастает и убывает, а на следующем втором участке 15 непрерывно возрастает. С целью обеспечить быстрое торможение в конце работы в режиме торможения и возможность полной остановки универсального электродвигателя к моменту окончания работы в режиме торможения обмотка возбуждения возбуждается переменным током, частота которого ниже частоты тока сети и который состоит из пакетов положительных и отрицательных полуволн. Частота пакетов полуволн преимущественно составляет менее 10 Гц. Периодическое возрастание и убывание тока возбуждения в обмотке возбуждения вызывает в коллекторе короткозамкнутого якоря значительное искрение под щетками.
Прохождение переменного тока в виде пакетов положительных и отрицательных полуволн или пульсирующего постоянного тока через обмотку возбуждения на протяжении всего времени торможения нежелательно, поскольку щетки при этом подвергаются интенсивному износу.
На фиг.6 показаны кривая 16 тока в виде сплошной линии и кривая 17 тока в виде пунктирной линии, которыми соответственно обозначены в целом слишком высокое потребление тока обмоткой возбуждения при работе в режиме торможения с одной стороны и слишком низкое потребление ею тока с другой стороны.
С целью обеспечить при работе в режиме торможения наличие всегда одинаковой кривой тока предусмотрено регулируемое потребление тока обмоткой возбуждения. На фиг.7 показана кривая 18 тока, отражающая подобное регулируемое его потребление обмоткой возбуждения. В начале 13 работы в режиме торможения потребление переменного тока обмоткой возбуждения начинается с частоты тока в сети (сетевой частоты) и с установленного на постоянную величину низкого значения, которое в ходе дальнейшей работы в режиме торможения непрерывно увеличивается на участках 19, 20, 21 до начала пакетов 22 полуволн. Регулирование тока происходит посредством предусмотренного в электрической схеме шунта 7, параметры которого анализируются или обрабатываются контроллером управляющей электроники 5, который по заложенной в него программе соответствующим образом управляет симистором 3. Посредством шунта 7 одновременно можно также регулировать вращающий момент при работе в двигательном режиме при снижении частоты вращения вала универсального электродвигателя на холостом ходу. Шунт 7 позволяет также эффективно выявлять перегрузку универсального электродвигателя, а также блокирование электрической ручной машины. В подобном случае управляющая электроника 5 соответственно уменьшает или даже полностью прекращает подвод тока к универсальному электродвигателю.
Для работы в режиме торможения в контроллер управляющей электроники 5 заложены соответствующая программа и соответствующие данные, обеспечивающие плавное и быстрое торможение при минимально возможном искрении под щетками.
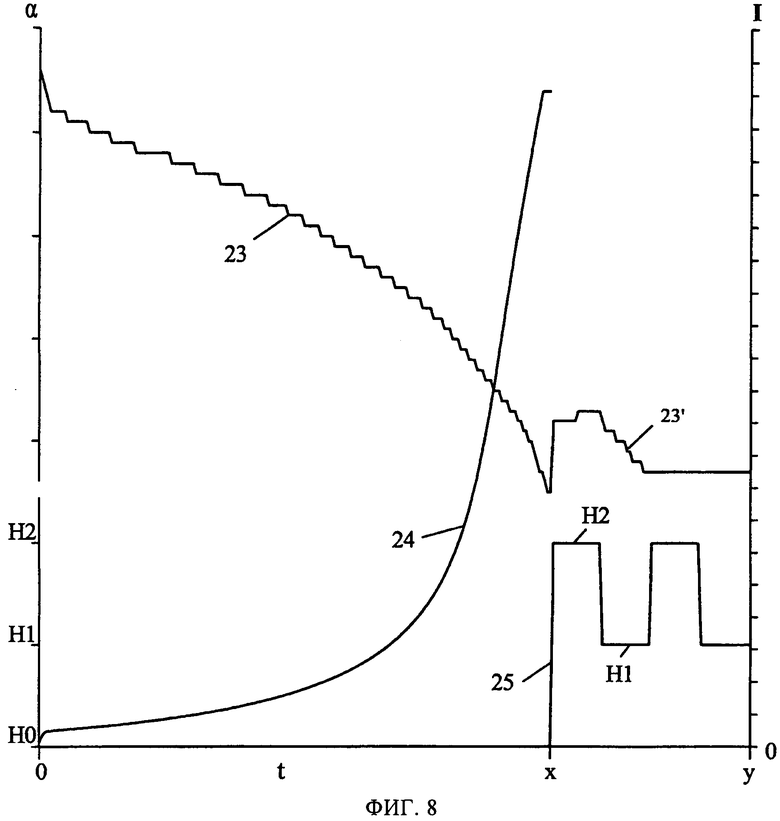
На фиг.8 показана диаграмма регулировочных кривых и регулировочных данных, содержащихся в программе, заложенной в контроллер управляющей электроники. Таблица регулировочной кривой для углов фазовой отсечки (фазовых углов) в режиме торможения показана соответствующими первой и второй кривыми 23, 23', а данные заданных значений тока показаны соответствующей кривой 24, при этом кривая 23 углов фазовой отсечки выбрана таким образом, что в принципе достигается кривая 24 заданных значений тока. Отклонения от кривой 24 заданных значений тока корректируются регулятором тока. При соответствующем конструктивном исполнении универсального электродвигателя можно отказаться от применения регулятора тока. Кривая 24 заданных значений тока может также достигаться регулятором тока и без кривой 23 углов фазовой отсечки, когда в начале кривой 24 заданных значений тока регулятору тока задан угол фазовой отсечки. Заложенная в контроллер программа для первой кривой 23 углов фазовой отсечки активна в начале работы в режиме торможения в период времени от момента 0 до момента х (Н0), при этом обмотка возбуждения запитывается переменным током с частотой, равной сетевой частоте. Заложенная в контроллер программа для второй кривой 23' углов фазовой отсечки активна в конце работы в режиме торможения в период времени от момента х до момента у для управления полуволнами, а обмотка возбуждения запитывается переменным током с частотой ниже сетевой частоты соответственно пакетам Н2 и H1 полуволн, представленных соответствующей регулировочной кривой 25. Пакеты полуволн в данном случае являются нерегулируемыми, однако могут также быть регулируемыми. Регулировочная кривая 25 полуволн задается второй кривой 23' углов фазовой отсечки. В пакетах H1 полуволны могут быть положительными, а в пакетах Н2 полуволны в этом случае могут быть отрицательными либо в пакетах H1 полуволны могут быть отрицательными, а в пакетах Н2 полуволны в этом случае могут быть положительными.
Для возможности поддержания искрения под щетками универсального электродвигателя без их смещения, а тем самым и их износа при работе в режиме торможения на низком уровне торможение следует выполнять с использованием переменного тока сетевой частоты, при котором износ щеток минимален. Возбуждение же поля постоянным током или пульсирующим постоянным током обусловливает интенсивный износ щеток. Поскольку для работы в режиме торможения возбуждение поля происходит переменным током сетевой частоты при короткозамкнутом якоре, процессом торможения управлять сложно, когда требуется уменьшить искрение под щетками при той же продолжительности торможения. Поэтому при заданных кривых 23, 23' углов фазовой отсечки шаг их изменения составляет менее 1%, при этом даже в данном случае колебания потребляемого тока возбуждения поля все еще могут достигать значительных величин и обусловливать тем самым значительное искрение под щетками. Поэтому повышенные колебания тока, потребляемого обмоткой возбуждения, предотвращаются заданной кривой 24 заданных значений тока. Помимо этого заданная кривая 24 заданных значений тока обеспечивает постоянную продолжительность торможения несмотря на износ щеток и тем самым на уменьшение их давления на коллектор.
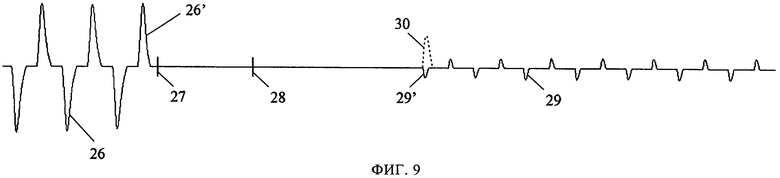
На фиг.9 показана сигналограмма, отражающая характеристику изменения тока в виде полных волн с фазовой отсечкой и с частотой, равной сетевой частоте, при переходе с работы в двигательном режиме на работу в режиме торможения. Работа универсального электродвигателя в режиме холостого хода обозначена полными волнами 26 с фазовой отсечкой и с частотой, равной сетевой частоте. В момент, обозначенный маркировочной меткой 27, произошло переключение с работы в двигательном режиме на работу в режиме торможения, а переключатели аппаратного выключателя разомкнули обеспечивающие работу в двигательном режиме контакты. В момент, обозначенный маркировочной меткой 28, переключатели аппаратного выключателя замкнули обеспечивающие работу в режиме торможения контакты. Тем самым переключатели в данном случае обладают задержкой переключения примерно в четыре полупериода. В пределах задержки переключения переключателей контроллер управляющей электроники переключается с двигательного режима на режим торможения. После примерно шести полупериодов запускается управляющая торможением программа, которая начинается с большой фазовой отсечки полуволн 29 сетевой частоты, однако может также начинаться ранее. Программа, заложенная в контроллер, составлена таким образом, что первая полуволна 29' для работы в режиме торможения всегда имеет полярность, обратную полярности последней полуволны 26' при работе в двигательном режиме. При окончании работы в двигательном режиме положительной полуволной работа в режиме торможения начинается с отрицательной полуволны, а при окончании работы в двигательном режиме отрицательной полуволной работа в режиме торможения начинается с положительной полуволны. Подобная смена полуволн необходима постольку, поскольку при одинаковой полярности полуволн при переключении с работы в двигательном режиме на работу в режиме торможения ток, протекающий в его первом полупериоде через обмотку возбуждения в начале работы в режиме торможения, может достигать очень большой величины, что обозначено пунктирной полуволной 30, обусловливая образование значительной электрической дуги на коллекторе якоря. Протекание столь сильного тока в его первом полупериоде 29' при работе в режиме торможения обусловлено тем, что остаточная намагниченность в железе полюсов статора имеет ту же полярность, что и последняя полуволна 26' при работе в двигательном режиме, и поэтому полюса статора предварительно намагничены.
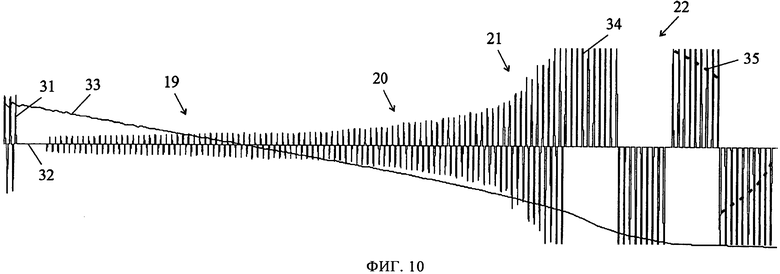
На фиг.10 показана сигналограмма, отражающая характеристику изменения тока, протекающего в обмотке возбуждения при работе в режиме торможения. Работа универсального электродвигателя в режиме холостого хода обозначена полными волнами 31 с фазовой отсечкой, а в период между переключением с работы от сети на работу в режиме торможения происходит по меньшей мере однократное прохождение током через нуль. По истечении времени 32 переключения с работы в двигательном режиме на работу в режиме торможения потребление тока в обмотке возбуждения сначала незначительно, при этом в последующем ток сети на первом участке 19 непрерывно возрастает лишь слегка, на втором участке 20 возрастает в несколько большей степени, а на третьем участке 21 резко возрастает, и поэтому кривая 33 изменения частоты вращения приблизительно имеет вид опускающейся прямой, вследствие чего частота вращения вала универсального электродвигателя при работе в режиме торможения непрерывно равномерно уменьшается. На четвертом участке 22 потребление переменного тока в обмотке возбуждения происходит с низкой частотой, и поэтому к обмотке возбуждения приложены пакеты положительных и отрицательных полуволн. Частота вращения вала универсального электродвигателя при работе в режиме торможения равномерно и непрерывно уменьшается до начала пакетов полуволн, и при поступлении пакетов полуволн двигатель быстро останавливается. Пакеты полуволн всегда при новом включении универсального электродвигателя изменяют чередование своей полярности, т.е. если в одном из циклов торможения первый пакет 34 состоит из положительных полуволн, то в следующем цикле торможения он состоит из отрицательных полуволн, благодаря чему достигается равномерный износ щеток. Подача пакетов полуволн на обмотку возбуждения универсального электродвигателя в конце работы в режиме торможения необходима постольку, поскольку при подаче переменного тока сетевой частоты на обмотку возбуждения универсальный электродвигатель в конце работы в режиме торможения приводится в действие.
Поскольку в зависимости от особенностей универсального электродвигателя в конце периода торможения индуктивное поле на якоре может превышать индуктированное поле, поле, приложенное к обмотке возбуждения, может в конце работы в режиме торможения приводить в действие якорь универсального электродвигателя. По этой причине может оказаться целесообразным значительно снижать потребление тока обмоткой возбуждения в конце периода торможения, что обозначено пунктирной линией 35, либо предварительно отключать питание от сети.
С целью дополнительно уменьшить износ щеток универсального электродвигателя с торможением можно снижать частоту вращения на холостом ходу в диапазоне номинального режима работы универсального электродвигателя, для чего универсальный электродвигатель в этом случае должен быть снабжен устройством определения частоты вращения. Снижение частоты вращения на холостом ходу предпочтительно прежде всего у ручной угловой шлифовальной машины или ручной дисковой пилы, поскольку благодаря этому облегчается надежное крепление инструмента. Сразу же при нагружении инструмента вращающий момент подрегулируется соответственно нагрузке на инструмент.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРМОЗ ДЛЯ УНИВЕРСАЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2553674C2 |
| ЭЛЕКТРОДИНАМИЧЕСКОЕ ТОРМОЗНОЕ УСТРОЙСТВО ДЛЯ УНИВЕРСАЛЬНОГО ДВИГАТЕЛЯ | 2010 |
|
RU2528413C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИМИСТОРОМ | 1991 |
|
RU2028025C1 |
| Устройство для передачи сигналов управления в сети энергоснабжения | 1988 |
|
SU1534482A1 |
| Электронное устройство реверсирования активатора стиральной машины | 1987 |
|
SU1463825A1 |
| Устройство для торможения электровоза | 1980 |
|
SU935330A1 |
| Электропривод бурового станка | 1990 |
|
SU1716065A2 |
| Устройство для управления приводом дверей лифта | 1974 |
|
SU542706A1 |
| Устройство для управления трехфазным асинхронным двигателем | 1978 |
|
SU919035A1 |
| Устройство для управления тяговым электроприводом | 1979 |
|
SU874406A1 |




Изобретение относится к области электротехники и может быть использовано для универсальных электродвигателей в электрической ручной машине, оснащенной опасным инструментом. Технический результат - повышение надежности в режиме торможения и в двигательном режиме при наличии опасного инструмента. В электродинамическом тормозе для универсального электродвигателя обмотка возбуждения при работе в режиме торможения запитывается от сети, а якорь непосредственно замкнут накоротко. Процесс торможения выполняется под управлением программы, заложенной в контроллере управляющей электроники, благодаря чему достигается эффективное торможение при сравнительно малом износе щеток. 8 з.п. ф-лы, 10 ил.
1. Электродинамический тормоз для универсального электродвигателя с устройством для переключения с работы в двигательном режиме на работу в режиме торможения, при работе в котором обмотка (2) возбуждения универсального электродвигателя запитана от сети, а якорь замкнут накоротко, при этом в контроллер управляющей электроники (5) заложены данные для первой и второй кривых (23; 23') углов фазовой отсечки, для кривой (24) заданных значений тока и для регулировочной кривой (25) полуволн, отличающийся тем, что посредством шунта (7) при работе в режиме торможения определено фактическое значение тока для регулятора тока, входящего в состав управляющей электроники (5), и регулятором тока посредством кривой (23) углов фазовой отсечки достигнута кривая (24) заданных значений тока или при работе в режиме торможения возбуждение обмотки (2) возбуждения достигнуто только посредством кривых (23, 23') углов фазовой отсечки.
2. Электродинамический тормоз по п.1, отличающийся тем, что кривая (24) заданных значений тока достигнута непосредственно регулятором тока, которому в начале работы в режиме торможения задан угол фазовой отсечки.
3. Электродинамический тормоз по п.1, отличающийся тем, что пакеты (22) полуволн являются нерегулируемыми или регулируемыми, а потребление тока обмоткой (2) возбуждения в конце периода торможения значительно снижено (35).
4. Электродинамический тормоз по п.1, отличающийся тем, что регулировочная кривая кривых (23, 23') углов фазовой отсечки, а также регулировочные данные заданного значения тока на кривой (24) заданных значений тока образованы таблицей или математической функцией.
5. Электродинамический тормоз по п.1, отличающийся тем, что в период между переключением с работы от сети на работу в режиме торможения происходит по меньшей мере однократное прохождение током через нуль, первая полуволна (29') при работе в режиме торможения всегда имеет полярность, обратную полярности последней полуволны (26') при работе в двигательном режиме, и пакеты полуволн всегда при новом включении универсального электродвигателя изменяют чередование своей полярности, т.е. в одном из циклов торможения первый пакет (34) состоит из положительных полуволн, а в следующем цикле торможения он состоит из отрицательных полуволн.
6. Электродинамический тормоз по одному из пп.1-5, отличающийся тем, что при работе в режиме торможения к якорю приложен момент, изменяющийся таким образом, что достигается кривая (33) изменения частоты вращения, приблизительно имеющая вид опускающейся прямой, при этом при работе в режиме торможения потребление тока в обмотке возбуждения сначала незначительно, в последующем на первом участке (19) непрерывно возрастает лишь слегка, на втором участке (20) возрастает в несколько большей степени, а на третьем участке (21) резко возрастает.
7. Электродинамический тормоз по одному из пп.1-5, отличающийся тем, что для распознавания работы в двигательном режиме и работы в режиме торможения управляющая электроника (5) имеет распознающий вывод, ведущий к одному переключателю аппаратного выключателя, переключатели которого обладают равной по меньшей мере длительности одной полуволны сетевого тока задержкой переключения в положение замыкания каждым из них контакта, обеспечивающего работу в режиме торможения.
8. Электродинамический тормоз по п.7, отличающийся тем, что распознающий вывод (6) управляющей электроники (5) при работе в двигательном режиме через переключатель аппаратного выключателя непосредственно соединен с выводом для подключения к сети или через переключатель и обмотку (2, 2') возбуждения соединен с выводом для подключения к сети, якорь (1) после переключения на работу в режиме торможения через два переключателя (S3, S4; S5, S6) с задержкой переключения с обеих сторон отсоединен от сети, а по окончании работы в режиме торможения обмотка (2) возбуждения через симистор отсоединена от сети.
9. Электродинамический тормоз по одному из пп.1-5, отличающийся тем, что для двустороннего механического отсоединения якоря (1) от сети аппаратным выключателем с переключателями (S3, S4) без задержки переключения в электрической схеме предусмотрены три симистора (v, v', v”), из которых первый симистор (v) при работе в двигательном режиме через первый переключатель (S3) последовательно включен с универсальным электродвигателем, второй симистор (v') при работе в режиме торможения через второй переключатель (S4) последовательно включен с обмоткой (2) возбуждения, а третий симистор (v”) включен в короткозамыкающую перемычку (w) якоря (1).
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1997 |
|
RU2116897C1 |
| Устройство для электродинамического торможения электродвигателей постоянного тока | 1961 |
|
SU141916A1 |
| Тяговый электропривод | 1987 |
|
SU1432709A1 |
| СПОСОБ ПРОИЗВОДСТВА ВАФЕЛЬ (ВАРИАНТЫ) | 2009 |
|
RU2400990C1 |
| DE 19912121 A1, 28.09.2000 | |||
| US 5789885 A, 04.08.1998 | |||
| СТАРТЕР ТЛЕЮЩЕГО РАЗРЯДАдля | 0 |
|
SU352419A1 |
| WO 9103869 A1, 21.03.1991 | |||

