Предлагаемое изобретение относится к способам управления группами подвижных объектов военного назначения, функционирующих в условиях наблюдения средствами космической разведки противника. Может применяться в системах управления робототехническими комплексами военного назначения, в системах поддержки принятия решения органов военного управления.
Известны различные способы и устройства прогнозирования состояния подвижных объектов различного типа - морских судов, поездов, городского автомобильного транспорта. К ним могут быть отнесены следующие.
Способ имитационного моделирования поездопотока по участку железной дороги с помощью аппаратно-программного комплекса, при котором задают график движения поездов, оперативные данные, включающие в себя характеристики входных потоков поездов, характеристики каждого поезда и условия пропуска, и вспомогательные данные и постоянные данные для моделирования, включающие в себя данные об участке в виде множества логически связанных массивов данных, включающего в себя массивы данных, соответствующих блок-участкам, вводят данные об ограничениях скорости по состоянию пути и скорости, предписываемой показаниями светофоров, после инициализации данных осуществляют моделирование путем изменения состояния массивов данных участка, сохраняя результаты моделирования (RU 2207279).
Недостатком указанного способа является относительно узкая область его применения ограниченная моделированием движения поездов.
Способ прогнозирования перемещения объектов движения в мегаполисе путем многофакторного моделирования перемещаемого транспортного потока, включающий структурную разбивку транспортного потока на различные типы объектов движения, построение привязанной к реальной геометрии города улично-дорожной сетки с разбивкой ее на ячейки, заданием каждому объекту времени его начала, обновление конфигурации модели путем перемещения объектов по сетке, определение для каждого транспортного средства набора маршрутов с начальной и конечной точкой (RU 2528501).
Недостатком указанного способа является относительно узкая область его применения ограниченная моделированием движения городских транспортных средств.
Также известными являются математические модели, позволяющие прогнозировать движение космических аппаратов, рассчитывать зоны обзора их бортовой аппаратуры и определять вероятность обнаружения наземных объектов (Куренков, В.И. Методы исследования эффективности ракетно-космической техники [Электронный ресурс]: электрон. учеб. пособие / В.И. Куренков, М.Ю. Гоголев; Минобрнауки России, Самар. гос. аэрокосм. ун-т им. С.П. Королева (нац. исслед. ун-т). - Электрон. текстовые и граф. дан. (6,46 Мбайт). - Самара, 2012).
При этом отсутствуют способы, позволяющие моделировать результаты совместного функционирования группы наземных объектов и космических аппаратов, осуществляющих наблюдение за ними, а также прогнозировать изменение состояния группы подвижных объектов, функционирование которых направлено на снижение вероятности их обнаружения системой космической разведки.
Также известно устройство прогнозирования и анализа обстановки для группы подвижных объектов, содержащее задатчик интервала времени прогноза, подключенный к блоку программы работы, блок индикации и формирователь прогноза, включающий блок памяти, подключенный к вычислителю, блок формирования массивов входных данных и группу формирователей прогнозов, при этом в каждый формирователь прогноза введен блок моделирования траектории движения соответствующего объекта, подключенный входом к блоку памяти, а выходом к вычислителю, выходы блока формирования массивов входных данных соединены с соответствующими блоками памяти, а выходы вычислителей подключены к блоку индикации (RU 2447476).
Недостатком данного устройства является относительно узкие функциональные возможности, не позволяющие применять его для прогнозирования состояния группы подвижных объектов, функционирование которых осуществляется в условиях наблюдения средствами космической разведки противника.
Наиболее близким аналогом заявленного способа является способ снижения заметности наземного подвижного объекта для систем наблюдения из космоса, включающий перемещение наземного подвижного объекта по маршруту движения с использованием маскирующих свойств местности, формирование множество маршрутов его движения на основе априорно известных географического расположения дорожной сети и параметров орбиты космического аппарата оптико-электронного наблюдения и с учетом временных ограничений, накладываемых на передвижение подвижного объекта, разбитие дорожной сети на участки, определение времени прохождения подвижным объектом контрольных точек, совпадающих с геометрическими центрами участков дорожной сети для каждого маршрута, определение временных интервалов пролета над территорией на основе параметров орбиты космического аппарата с оптико-электронной системой наблюдения, формирование множества количественных оценок излучательно-отражательных характеристик подстилающей поверхности и характеристик зон оптической невидимости для каждого интервала пролета, определение маршрута с наибольшими возможностями по использованию маскирующих свойств местности (RU 2373481).
Недостатком данного способа является относительно узкая область применения, не позволяющая использовать его для прогнозирования состояния группы подвижных объектов на некоторый заданный интервал времени с учетом их текущего состояния. Также, согласно указанному способу момент начала движения подвижного объекта является заданным и не зависит от положения космических аппаратов, что не позволяет учитывать возможность выбора для передвижения подвижных объектов интервалов времени, в которых космическое наблюдение за участком нахождения подвижного объекта не выполняется.
Требуемым техническим результатом является обеспечение возможности автоматического расчета прогнозного состояния группы подвижных объектов (координат местоположения и вероятности обнаружения), функционирование которых осуществляется в условиях наблюдения средствами космической разведки противника, с учетом текущего состояния подвижных объектов и состояния средств разведки противника.
Согласно изобретению технический результат достигается тем что способ прогнозирования состояния группы подвижных объектов, включающий разбитие дорожной сети на участки; определение временных интервалов пролета над территорией на основе параметров орбиты космического аппарата с оптико-электронной системой наблюдения; формирование множество маршрутов движения подвижного объекта на основе априорно известных географического расположения дорожной сети, параметров орбиты космического аппарата оптико-электронного наблюдения и с учетом временных ограничений, накладываемых на передвижение подвижного объекта, отличается от ближайшего аналога тем, что записывают в запоминающее устройство данные о характеристиках участков дорожной сети, характеристиках подвижных объектов, текущем состоянии подвижных объектов, характеристиках космических аппаратов наблюдения, текущем положении космических аппаратов наблюдения; получают информацию о текущем местоположении подвижных объектов и положении космических аппаратов наблюдения; записывают в запоминающее устройство интервал времени на который осуществляется прогнозирование состояния группы подвижных объектов; определяют временные интервалы пролета над территорией на основе параметров орбиты космического аппарата наблюдения исходя из текущего (прогнозного) местоположения каждого из подвижных объектов и текущего (прогнозного) положения космических аппаратов наблюдения, при этом результаты определения временных интервалов записывают в запоминающее устройство; моделируют управление функционированием каждого подвижного объекта посредством автоматического расчета момента начала движения подвижного объекта и продолжительности движения в зависимости от нахождения его в зоне видимости космических аппаратов наблюдения, интервала времени прошедшего с момента остановки и параметра режима функционирования подвижного объекта, при этом получают из запоминающего устройства значения временных интервалов пролета космического аппарата соответствующие текущему (прогнозному) местоположению подвижного объекта; записывают в запоминающее устройство значение параметра состояния (находится объект в движении или стоит на позиции), координаты, продолжительность нахождения в данных координатах, продолжительность нахождения в зоне видимости космических аппаратов наблюдения для каждого из подвижных объектов; получают из запоминающего устройства значения последних (относительно интервала прогнозирования) интервалов времени нахождения каждого из подвижных объектов в зоне обзора космических аппаратов наблюдения, рассчитывают на их основе вероятность обнаружения каждого из подвижных объектов и записывают в запоминающее устройство.
Сущность способа заключается в следующем.
Считается что группа подвижных объектов осуществляет функционирование в некотором районе таким образом, чтобы снизить вероятность обнаружения объектов космическими аппаратами наблюдения. При этом под функционированием подвижных объектов понимается периодическое перемещение их с текущей позиции на новую позицию. Вероятность обнаружения объекта определяется продолжительностью нахождения его на позиции в зоне видимости космических аппаратов наблюдения.
Продолжительность нахождения подвижных объектов на позиции и продолжительность движения для затруднения прогнозирования их состояния противником является случайной величиной, распределенной по экспоненциальному закону распределения. При этом среднее время движения и среднее время стоянки на позиции (интенсивность смены позиций) определяется режимом функционирования подвижного объекта и задается в составе исходной информации исходя из запаса ресурса подвижных объектов и ожидаемой продолжительности их функционирования.
Также, если выбранной случайным образом момент времени начала движения (момент времени окончания нахождения на текущей позиции) совпадает с периодом наблюдения текущей позиции подвижного объекта космическим аппаратом наблюдения, момент времени сдвигается до окончания периода наблюдения текущей позиции подвижного объекта. То есть, начало движения осуществляется в момент, когда подвижный объект на находится в зоне видимости космических аппаратов.
Аналогичным образом момент окончания движения подвижного объекта выбирается случайно (в соответствии с заданным законом распределения), но если время движения превышает период, когда объект не находится в зоне видимости космических аппаратов, то момент окончания движения корректируется таким образом, чтобы обеспечить остановку объекта на позиции до того, как он попадет в зону видимости космических аппаратов наблюдения.
В соответствии с указанными положениями предлагаемый способ включает следующие операции.
1. Проводят разбитие дорожной сети на участки. При этом исходя из характеристик дорожного покрытия и углов поворота дорог выбираются те участки, которые позволяют организовать движение подвижных объектов рассматриваемого типа.
2. Записывают в запоминающее устройство данные о характеристиках участков дорожной сети, характеристиках подвижных объектов, характеристиках космических аппаратов наблюдения
К характеристикам участков дорожной сети относится тип дороги b (грунтовая, бетонированная, асфальтированная), в зависимости от которого устанавливается средняя скорость движения подвижного объекта.
К характеристикам подвижных объектов относятся средняя скорость их движения в зависимости от типа дороги Vср(b), параметры режима функционирования (среднее время стоянки mст и среднее время движения mдв).
К характеристикам космических аппаратов наблюдения относятся большая полуось орбиты (а), эксцентриситет орбиты (е), прямое восхождение восходящего узла орбиты (W), наклонение орбиты (I), аргумент широты перигея (w), время прохождения перигея (t), а также характеристики, определяющие качество аппаратуры космических аппаратов наблюдения - разрешающая способность аппаратуры (rап), фокусное расстояние объектива (ƒ), аппаратурный угол обзора (аап), мгновенный угол поля зрения (а'), дисперсия ошибки угла визирования - ( ).
).
3. С применением технических средств связи и передачи информации получают информацию о текущем местоположении подвижных объектов и положении космических аппаратов наблюдения и записывают ее в запоминающее устройство.
Информация о местоположении каждого i-го из N подвижных объектов включает их текущую широту (ji), долготу (li) и высоту относительно уровня моря (hi).
Информация о положении каждого j-го из М космических аппаратов наблюдения включает их орбитальные координаты (xj, yj, zj)и составляющие скорости (Vxj, Vyj, Vzj), рассчитываемые на основе текущего значения аргумента широты каждого космического аппарата uj.
4. Записывают в запоминающее устройство интервал времени на который осуществляется прогнозирование состояния группы подвижных объектов - Тпр.
5. Определяют временные интервалы пролета над территорией на основе параметров орбиты космического аппарата наблюдения исходя из текущего (прогнозного) местоположения каждого из подвижных объектов и текущего (прогнозного) положения космических аппаратов наблюдения, при этом результаты определения временных интервалов записывают в запоминающее устройство.
Реализация данной операции осуществляется посредством проведения автоматических расчетов с применением электронно-вычислительных средств. Алгоритм расчета временных интервалов пролета подробно изложен в (Куренков, В.И. Методы исследования эффективности ракетно-космической техники [Электронный ресурс]: электрон. учеб. пособие / В.И. Куренков, М.Ю. Гоголев; Минобрнауки России, Самар. гос. аэрокосм. ун-т им. С.П. Королева (нац. исслед. ун-т). - Электрон. текстовые и граф. дан. (6,46 Мбайт). - Самара, 2012) и других справочных и учебных издания по космической технике.
6. Моделируют управление функционированием каждого подвижного объекта посредством автоматического расчета момента начала движения ПО и продолжительности движения в зависимости от нахождения его в зоне видимости космических аппаратов наблюдения, интервала времени прошедшего с момента остановки и параметра режима функционирования подвижного объекта, при этом получают из запоминающего устройства значения временных интервалов пролета космического аппарата соответствующие текущему (прогнозному) местоположению подвижного объекта.
В соответствии с описанными выше допущениями, считается что продолжительность стоянки подвижного объекта является случайной величиной t с экспоненциальным законом распределения:
В таком случае для моделирования текущего значения продолжительности стоянки на позиции подвижного объекта может использоваться выражение:
tст=- mст Чn(R),
где R - равномерно распределенное случайное число в интервале от 0 до 1, полученное с применением генератора случайных чисел.
Если полученная продолжительность стоянки меньше текущего интервала непрерывного обзора позиции хотя бы одним из космических аппаратов наблюдения, продолжительность стоянки увеличивается на значение tкорр, таким образом, чтобы момент начала движения совпал с интервалом не наблюдения текущей позиции подвижного объекта:
t*=t0+tст+tкорр.
Моделирование (расчет) интервала времени движения подвижного объекта осуществляется аналогичным образом.
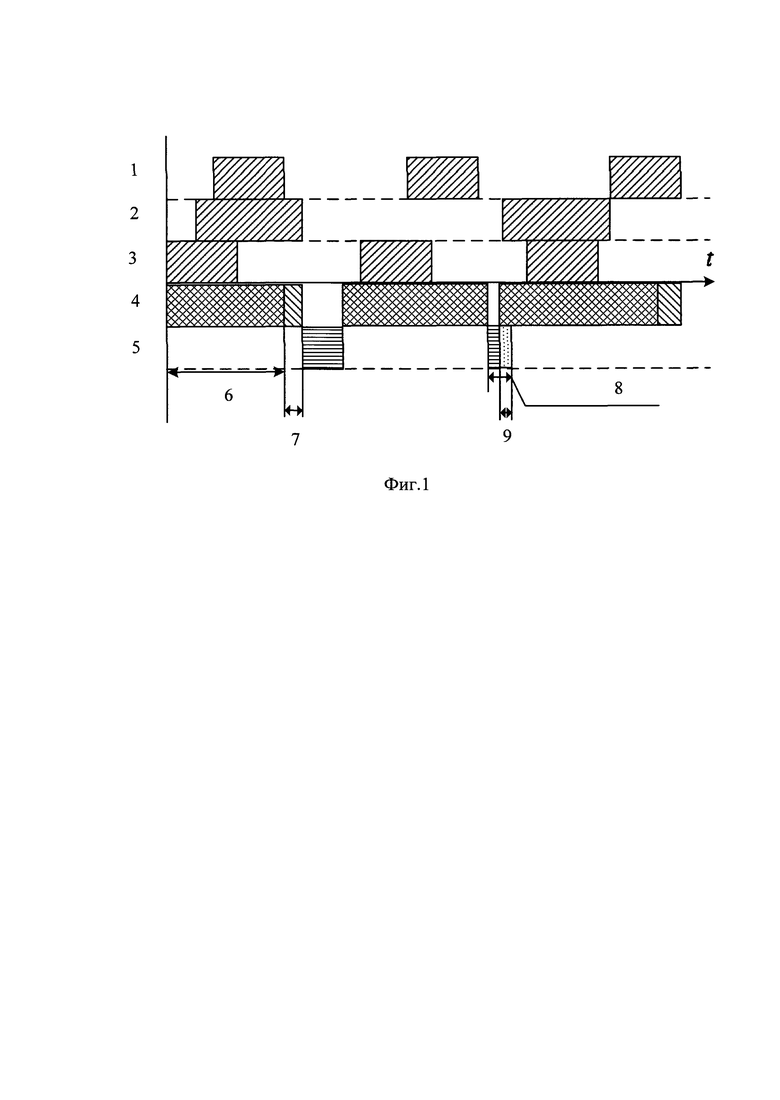
На фиг. 1 представлена диаграмма Ганта, поясняющая процесс выбора моментов начала движения и остановки подвижных объектов. На рисунке соответствующими цифрами обозначены:
1 - график пролета космического аппарата №1;
2 - график пролета космического аппарата №2;
3 - график пролета космического аппарата №3;
4 - график стоянки подвижного объекта;
5 - график движения подвижного объекта;
6 - интервал стоянки подвижного объекта, полученный на основе моделирования;
7 - величина коррекции интервала стоянки подвижного объекта для обеспечения скрытного начала движения;
8 - интервал движения подвижного объекта, полученный на основе моделирования;
9 - величина коррекции интервала движения подвижного объекта.
Расчет интервалов времени стоянки и движения выполняется для каждого из подвижных объектов.
Реализация описанной операции осуществляется посредством проведения автоматических расчетов с применением электронно-вычислительных средств и генератора случайных чисел.
После расчета момента времени начала движения подвижного объекта осуществляется формирование множество маршрутов движения подвижного объекта на основе априорно известных географического расположения дорожной сети и с учетом временных ограничений, накладываемых на передвижение подвижного объекта. Порядок реализации данной операции изложен в прототипе предлагаемого способа.
Далее случайным образом выбирается один из маршрутов и с учетом характеристик дорожной сети, средней скорости движения подвижного объекта и сформированного интервала движения подвижного объекта рассчитываются новые координаты его стоянки (местоположения).
После этого с учетом новых координат местоположения подвижного объекта производится повторный расчет временных интервалов пролета космических аппаратов над данной точкой на основе параметров орбиты космического аппарата наблюдения, исходя из текущего (прогнозного) местоположения каждого из подвижных объектов и текущего (прогнозного) положения космических аппаратов наблюдения, при этом результаты определения временных интервалов записывают в запоминающее устройство.
Далее повторно осуществляется моделирование стоянки и движения подвижных объектов.
Указанные операции осуществляются до тех пор, пока момент времени окончания стоянки либо движения подвижных объектов не достигнет момента времени, определенного заданным интервалом прогнозирования.
При этом, так как предполагается, что подвижные объекты могут функционировать в различных географических районах, временные интервалы наблюдения их космическими аппаратами и соответственно моменты начала движения и остановки различных подвижных объектов различаются. То есть на момент времени, определенный заданным интервалом прогнозирования часть подвижных объектов будут находиться на стоянке, а другая часть подвижных объектов будут находиться в движении.
Соответственно в качестве характеристик, определяющих состояние группы подвижных объектов, используются:
- параметр состояния (принимает значение «0», если объект находится на стоянке и «1», если объект двигается);
- координаты объекта;
- продолжительность нахождения в данных координатах;
- продолжительность нахождения в зоне видимости космических аппаратов наблюдения в данных координатах.
Сформированный в результате вычислений массив данных, содержащий указанные характеристики, направляется в запоминающее устройство по имеющимся каналам передачи данных.
7. Записывают в запоминающее устройство значение параметра состояния (находится объект в движении или стоит на позиции), координаты, продолжительность нахождения в данных координатах, продолжительность нахождения в зоне видимости космических аппаратов наблюдения для каждого из подвижных объектов.
8. Получают из запоминающего устройства значения последних (относительно интервала прогнозирования) интервалов времени нахождения каждого из подвижных объектов в зоне обзора космических аппаратов наблюдения, рассчитывают на их основе вероятность обнаружения каждого из подвижных объектов и записывают в запоминающее устройство.
При этом считается что интервал времени наблюдения, необходимый для обнаружения подвижного объекта, является случайной величиной с экспоненциальным законом распределения:
где mоб - среднее время необходимое космической системе наблюдения для обнаружения подвижного объекта, находящегося на позиции, при условии его непрерывного наблюдения;
tнаб - продолжительность непрерывного наблюдения подвижного объекта, находящегося на позиции.
Реализация данной операции осуществляется посредством проведения автоматических расчетов с применением электронно-вычислительных средств.
Таким образом, в результате применения предлагаемого способа для каждого из группы подвижных объектов могут быть получены значения, характеризующие их местоположение, состояние и вероятность обнаружения на заданный интервал прогнозирования, что соответствует заявленному техническому результату.
Предлагаемое техническое решение промышленно применимо, так как основано на операциях, широко распространенных в автоматизированных вычислительных системах и системах управления, и может быть реализовано как в виде устройства со специализированными блоками, так и на основе персонального компьютера с соответствующим программным обеспечением для осуществления предусмотренных функций.
Изобретение относится к области вычислительной техники и может быть использовано для прогнозирования состояния группы подвижных объектов военного назначения. Техническим результатом является автоматический расчет значений, характеризующих местоположение, состояние и вероятность обнаружения подвижных объектов на заданный интервал прогнозирования. Способ основан на моделировании управления функционированием каждого подвижного объекта посредством автоматического расчета момента начала движения подвижного объекта и продолжительности движения в зависимости от нахождения его в зоне видимости космических аппаратов наблюдения, интервала времени прошедшего с момента остановки и параметра режима функционирования подвижного объекта, при этом получают значения временных интервалов пролета космического аппарата, соответствующие текущему (прогнозному) местоположению подвижного объекта; записывают значение параметра состояния (находится объект в движении или стоит на позиции), координаты, продолжительность нахождения в данных координатах, продолжительность нахождения в зоне видимости космических аппаратов наблюдения для каждого из подвижных объектов; получают значения последних относительно интервала прогнозирования, интервалов времени нахождения каждого из подвижных объектов в зоне обзора космических аппаратов наблюдения, рассчитывают на их основе вероятность обнаружения каждого из подвижных объектов. 1 ил.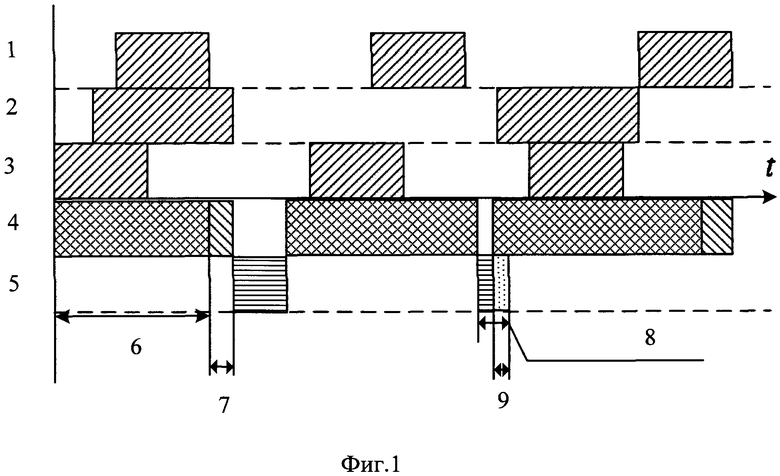
Способ прогнозирования состояния группы подвижных объектов, включающий разбитие дорожной сети на участки; определение временных интервалов пролета над территорией на основе параметров орбиты космического аппарата наблюдения; формирование множество маршрутов движения подвижного объекта на основе априорно известных географического расположения дорожной сети, параметров орбиты космического аппарата наблюдения и с учетом временных ограничений, накладываемых на передвижение подвижного объекта, отличающийся тем, что записывают в запоминающее устройство данные о характеристиках участков дорожной сети, характеристиках подвижных объектов, текущем состоянии подвижных объектов, характеристиках космических аппаратов наблюдения, текущем положении космических аппаратов наблюдения; получают информацию о текущем местоположении подвижных объектов и положении космических аппаратов наблюдения; записывают в запоминающее устройство интервал времени, на который осуществляется прогнозирование состояния группы подвижных объектов; определяют временные интервалы пролета над территорией на основе параметров орбиты космического аппарата наблюдения исходя из текущего (прогнозного) местоположения каждого из подвижных объектов и текущего (прогнозного) положения космических аппаратов наблюдения, при этом результаты определения временных интервалов записывают в запоминающее устройство; моделируют управление функционированием каждого подвижного объекта посредством автоматического расчета момента начала движения подвижного объекта и продолжительности движения в зависимости от нахождения его в зоне видимости космических аппаратов наблюдения, интервала времени прошедшего с момента остановки и параметра режима функционирования подвижного объекта, при этом получают из запоминающего устройства значения временных интервалов пролета космического аппарата, соответствующие текущему (прогнозному) местоположению подвижного объекта; записывают в запоминающее устройство значение параметра состояния (находится объект в движении или стоит на позиции), координаты, продолжительность нахождения в данных координатах, продолжительность нахождения в зоне видимости космических аппаратов наблюдения для каждого из подвижных объектов; получают из запоминающего устройства значения последних (относительно интервала прогнозирования) интервалов времени нахождения каждого из подвижных объектов в зоне обзора космических аппаратов наблюдения, рассчитывают на их основе вероятность обнаружения каждого из подвижных объектов и записывают в запоминающее устройство.
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2298825C1 |
| СПОСОБ СНИЖЕНИЯ ЗАМЕТНОСТИ ПОДВИЖНОГО ОБЪЕКТА ДЛЯ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2008 |
|
RU2373481C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ И АНАЛИЗА ОБСТАНОВКИ ДЛЯ ГРУППЫ ПОДВИЖНЫХ ОБЪЕКТОВ | 2010 |
|
RU2447476C1 |
| US 7188056 B2, 06.03.2007 | |||
| US 8044780 B2, 25.10.2011 | |||
| US 8253564 B2, 28.08.2012. | |||

