Изобретение относится к мускульным транспортным средствам (далее - МТС), приводимым в движение мускульной силой человека, и может быть использовано как транспортное средство для передвижения человека с использованием его мускульной силы.
Заявленный способ движения МТС не имеет аналогов.
Уровень техники
В настоящее время все транспортные средства, приводимые в движение мускульной силой, имеют ведущие колеса (движители), на которые посредством мускульной силы и разнообразных известных трансмиссий (механических передач) [1] передается крутящий момент. Ведущие колеса, получая крутящий момент, взаимодействуют с дорогой (земной поверхностью) посредством силы трения, которая вызывает движение МТС.
Но известные трансмиссии и механические передачи крутящего момента от педалей на ведущие колеса в известных МТС конструктивно сложны, дороги в изготовлении и в обслуживании. Сложна и ненадежна система переключения передач. Ограничена скорость известных МТС из-за включения ног человека в кинематическую цепь трансмиссии. Нет унификации ведомого и ведущего колес вследствие различия взаимодействия их с дорогой посредством силы трения. К тому же сила трения между ведущим колесом и дорогой вызывает повышенный износ шины ведущего колеса (движителя) по сравнению с ведомым колесом. Кроме того, траектория педалей в известных трансмиссиях МТС не учитывает эргономику в части движения ног человека.
Заявленный способ движения МТС предназначен для устранения перечисленных недостатков известных МТС, двигающихся известным способом.
Раскрытие способа
Движение МТС по заявленному способу поясняется с помощью закона сохранения импульса тела 

На фигуре 1 схематично изображено МТС 3 с устройством, содержащим два желоба 1 и два ролика 2, которые кинематически никак не связаны с колесами МТС 3. При виде сбоку виден только левый желоб и условно показаны оба ролика - для левой и правой ноги. Каждый из роликов по-разному нагружен массой человека. Передний ролик нагружен большей частью массы человека Мч, которая вызывает импульс для движения МТС вперед. Задний ролик нагружен массой ноги человека Мн, которая вызывает импульс для движения МТС назад, но этот импульс в среднем в 6 раз меньше, чем импульс для движения МТС вперед. При этом масса МТС и человека рассматривается как система, состоящая из двух тел, а именно:
1) МТС с установленным на нем блоком из двух овальных направляющих желобов и человеком, общая масса которых Мо;
2) двух роликов, каждый из которых поочередно нагружается большей частью массы человека Мч или массой его ноги Мн.
Каждый из двух роликов, находясь в своем желобе, имеет возможность катиться по его периметру под воздействием определенных импульсов человека - МчVp или МнVp. Здесь Vp - скорость качения ролика относительно периметра желоба и, следовательно, МТС в целом.
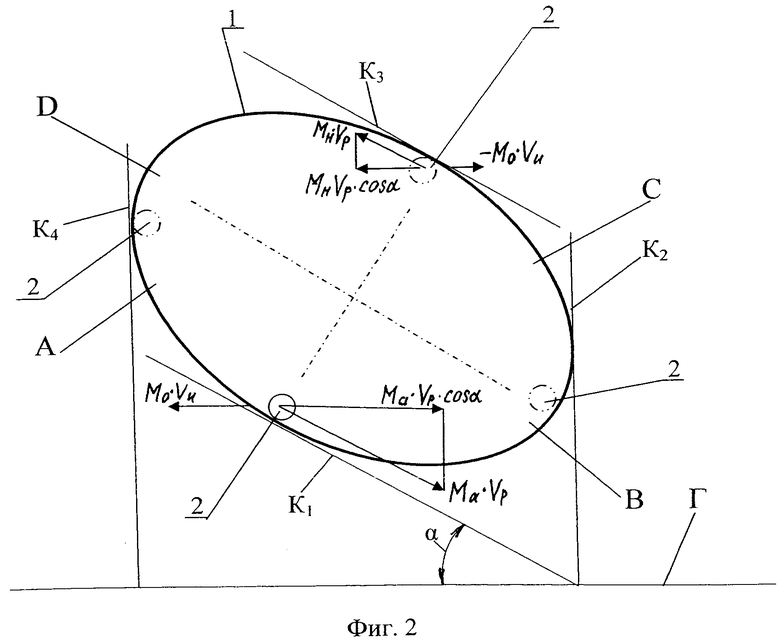
На фигуре 2 изображена схема одного желоба в увеличенном масштабе, на которой его периметр разделен на 4 функциональных отрезка действия импульсов:
АВ - рабочий импульс ролика, нагруженного большей частью массы человека Мч;
ВС - импульс ролика, направленный вверх с массой ноги человека Мн;
CD - обратный импульс ролика с массой ноги человека Мн;
DA - импульс ролика, направленный вниз с массой ноги человека Мн.
Так же разделен и второй (правый) желоб, имеющий такой же профиль.
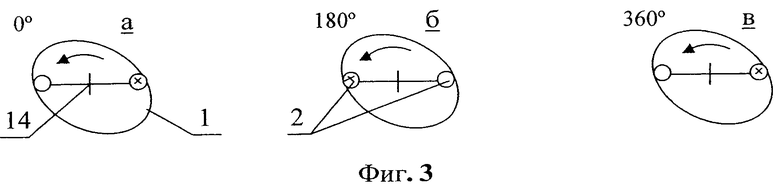
На фигуре 3 схематично показаны оба ролика 2, которые расположены на прямой линии, проходящей через середину желоба 1 (ось вала 14 - фигуры 4 и 5), вокруг которой они обращаются, что показано на позициях а, б, в с интервалом обращения 180°.
На каждом из обозначенных отрезков желоба 1 (фиг.2) вектор импульса ролика 2 с сосредоточенной на нем большей массой человека Мч или его ноги Мн имеет различные величины и направления в плоскости желоба 1.
Отрезок АВ - рабочий. На этом отрезке вектор импульса ролика 2 с сосредоточенной на нем большей массой человека Мч направлен параллельно касательной К1 к середине отрезка АВ и под углом α к горизонту Г. Поэтому горизонтальная составляющая импульса ролика 2 в скалярной форме будет МчVpcosα, которая входит в формулу сохранения импульса в данной системе (пп.1 и 2):

На данном отрезке достигается максимальный импульс в данной системе и, следовательно, максимальная скорость Vмтс. Например, когда человек использует всю массу своего тела Мч, при желании быстро увеличить начальную скорость МТС.
Величина большей части массы человека Мч, что давит на ролики 2, регулируется импульсами различных мышц человека, вызывающих движения коленных, тазобедренных и других суставов, которые передают их импульсы роликам. Таким образом, в данной системе, в соответствии с законом сохранения импульса, происходит движение МТС по заявленному способу с использованием энергии человека.
Отрезок ВС - вспомогательный. На этом отрезке частью массы человека является масса его ноги Мн. Качение ролика 2 с массой ноги человека, в середине этого отрезка, в точке касания вертикальной прямой К2, направлено вертикально вверх. Поэтому импульс МнVр здесь будет направлен так же вертикально вверх без влияния на скорость МТС. Скалярные составляющие импульсов МнVр от точки В до точки касания прямой К2 и от точки касания К2 до точки С равны и направлены горизонтально, но в противоположные стороны. Поэтому их суммы равны нулю и на расчетную (фактическую) скорость МТС они также не влияют.
Отрезок CD - вспомогательный. Для этого отрезка значение угла наклона α касательной К3 к горизонтали Г такое же, как и для отрезка АВ, а вот в качестве массы здесь участвует только масса ноги человека Мн. Горизонтальная составляющая импульса в скалярной форме на этом отрезке MнVpcosα действует во втором (правом) желобе одновременно со скалярной составляющей МчVpcosα, действующей на отрезке АВ в первом (левом) желобе, но его вектор направлен в противоположную сторону. Поэтому на этом отрезке (CD) он дает слагаемую скорость для МТС со знаком «минус»:

которая по абсолютной величине меньше Vмтс.
Отрезок DA - вспомогательный. Этот отрезок аналогичен отрезку ВС. Однако качение ролика здесь в середине участка, в точке касания вертикальной прямой линии К4, перпендикулярной горизонтали Г, направлено вертикально вниз. Поэтому импульс МнVр здесь будет направлен вертикально вниз без влияния на скорость МТС. Скалярные составляющие импульсов МнVр от точки D до точки касания прямой К4 и от точки касания К4 до точки А равны и направлены горизонтально, но в противоположные стороны. Поэтому их суммы равны нулю и на расчетную (фактическую) скорость МТС они так же не влияют.
Анализ импульсов роликов 2 на отрезках желобов 1 показывает, что для расчета скорости Vмтс имеет значение только разность между рабочим импульсом на рабочем отрезке АВ от одного ролика и одновременным импульсом на вспомогательном отрезке CD от другого ролика, т.е. MxVpcosα - MyVpcosα. Эта разность входит в состав формулы закона сохранения импульса для заявленного способа движения МТС:

Из формулы (3) скорость МТС:

где Vмтс - скорость МТС, м/с;
N - количество желобов (в комплекте с роликом) на МТС;
α - угол между касательной к середине рабочего отрезка (АВ, фиг.2) и горизонталью;
Мч - бóльшая часть массы человека, кг;
Мн - масса ноги человека, кг;
Vp - скорость перемещения (качения) роликов по периметрам желобов, м/с;
n-1 - количество обращений ролика по периметру желоба за одну секунду;
η - механический коэффициент полезного действия (КПД) МТС;
Мо - масса общая - МТС и человека, кг.
Мускульное транспортное средство для осуществления способа
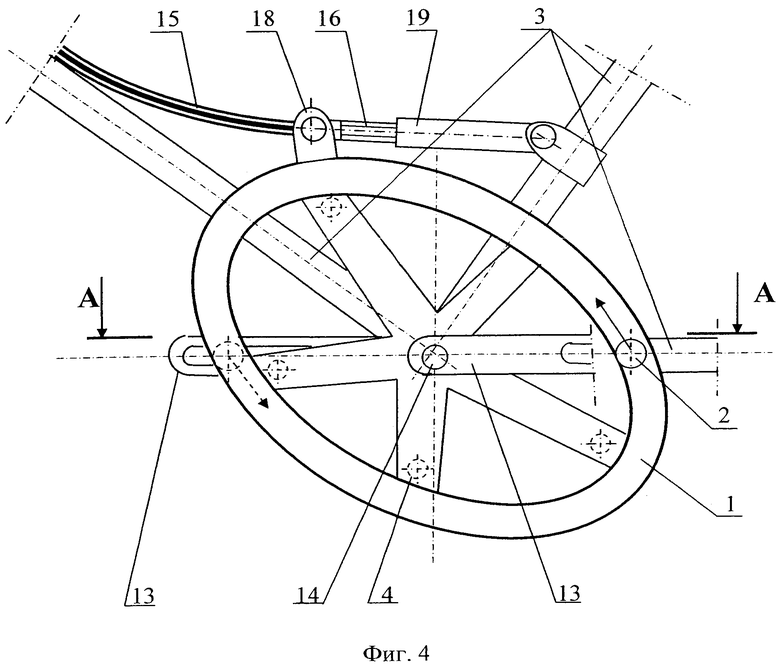
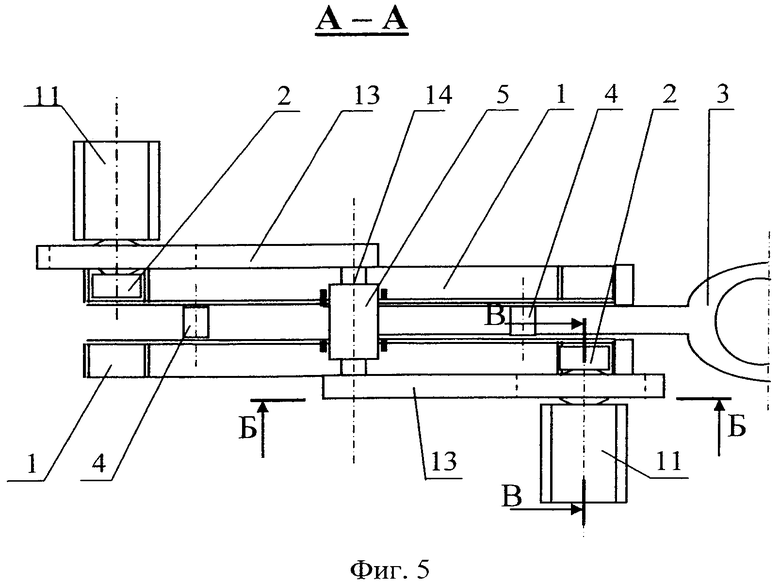
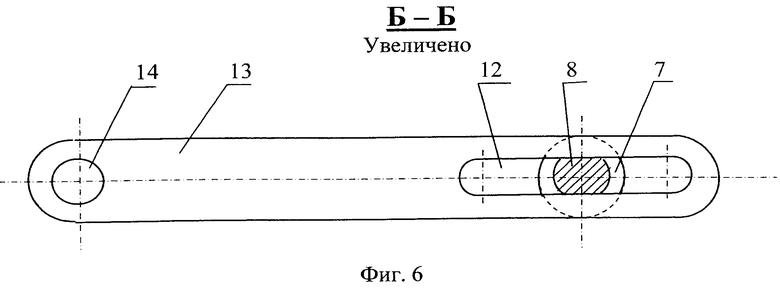
Устройство МТС для осуществления способа поясняется с помощью фигур 1, 4, 5, 6, 7: на фигурах 1, 4 показано МТС - вид сбоку; на фиг.5 - разрез, вид сверху; на фигурах 6 и 7 - разрезы узла ролика.
МТС содержит: два желоба 1 овальной формы, расположенные с обеих сторон рамы МТС 3, скрепленные между собой через дистанционные втулки 4 и имеющие возможность поворота вокруг каретки 5; два ролика 2, каждый из которых имеет возможность перемещаться в соответствующем желобе 1 (фиг.4, 5) и вращаться на оси 6 с буртом 7 кулисного камня 8 (фиг.5, 7), к которому соосно закреплена ось 9 с буртом 10 педали 11 (фиг.5, 7), причем кулисный камень 8 имеет возможность перемещаться в пазу 12 кулисы 13 (фиг.6), закрепленной на валу 14 каретки 5.
Управление мускульным транспортным средством для осуществления способа
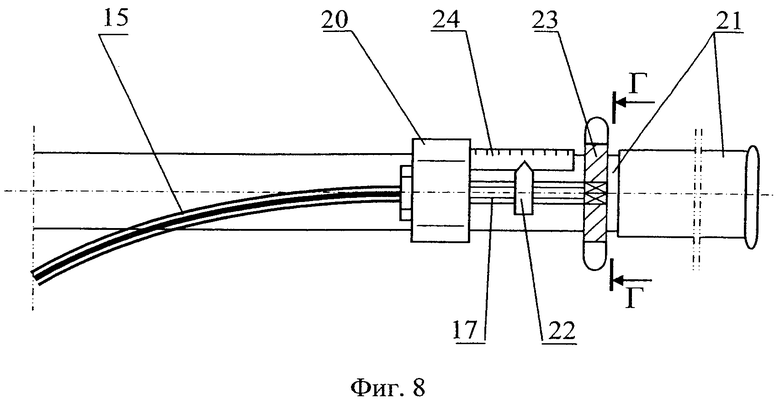
Устройство управления МТС для осуществления способа поясняется с помощью фигур 4, 8, 9. Устройство содержит: гибкий вал 15 с резьбой 16 и 17 на обоих его наконечниках, один конец которого установлен в проушине 18 желобов 1 и ввернут в стяжную муфту 19, которая закреплена на раме 3 МТС, а другой конец которого установлен на кронштейне 20, который закреплен на ручке руля 21, причем наконечник с резьбой 17 ввернут в указатель 22 для градусной шкалы 24, закрепленной на кронштейне 20, и на наконечнике 17 установлен маховик, при этом параметры резьбы на обоих наконечниках 16 и 17 могут отличаться друг от друга.
Действия человека при передвижении на мускульном транспортном средстве для заявленного способа
Посредством одной из педалей 11 ролик 2, находящийся на оси педали, устанавливается в верхнюю часть отрезка АВ желоба 1 (фиг.2, 4), после чего он нагружается большей частью массы человека Мч. Одновременно вторая нога человека прекращает опираться на поверхность дороги и устанавливается на вторую педаль 11 устройства (фиг.1). Происходит первый импульс в системе, состоящей из:
1) МТС, с находящимся на нем человеком, общая масса которых Мо;
2) ролика, нагруженного большей частью массы человека Мч.
В результате происходит движение МТС, которое поддерживается последующими импульсами роликов 2 на отрезках АВ желобов 1 (фиг.2, 4), в соответствии с формулами (3) и (4), с использованием энергии человека.
Для конкретных дорожных условий - продольного дорожного профиля, оптимальный угол α (фиг.2) между касательной K1 к середине рабочего отрезка желоба 1 и горизонталью Г устанавливают вращением маховика 23 (фиг.8, 9), который передает вращающий момент наконечнику с резьбой 16, который вворачивается (выворачивается) в стяжную муфту 19, что приводит к повороту желоба 1 (фиг.2, 4) в сторону увеличения (уменьшения) угла α.
С изменением угла α изменяется и горизонтальная, скалярная составляющая величина импульса. Например, при езде в гору угол α уменьшают на определенную величину. При этом количество обращений n-1 ролика 2 по периметру желоба 1 за одну секунду может также изменяться - увеличиваться или уменьшаться (формула (4)).
Преимущества
Из описания и графической части видно, что МТС для заявленного способа движения конструктивно проще, дешевле в изготовлении и в обслуживании и потому надежнее в эксплуатации, чем известные МТС. В управлении заявленного устройства предусмотрено бесступенчатое регулирование величины импульса и, следовательно, скорости МТС. А траектория движения ног человека, опертых на педали устройства, учитывает эргономику человека в части движения его ног. А именно: движения ног человека повторяют профиль овальных желобов. Для заявленного способа движения МТС нет понятий "ведущее колесо" и его "пробуксовка" - переднее и заднее колеса у него унифицированы и потому их ресурс одинаков, т.е. более продолжителен. Кроме того, МТС по заявленному способу, при прочих равных условиях, более быстроходен, чем известные МТС, за счет отсутствия (ненужности) кинематической связи (трансмиссии) между роликами 2 и колесами МТС 3.
Перечисленные преимущества показывают экономическую эффективность МТС для заявленного способа движения по сравнению с МТС для известного способа движения.
Осуществление изобретения
Мускульное транспортное средство (МТС) для осуществления заявленного способа движения конструктивно проще, технологичнее и дешевле в изготовлении, чем известные МТС. Все детали МТС для осуществления заявленного способа движения имеют простую конфигурацию, не требуют уникального оборудования для их изготовления. Их можно изготовить на современном машиностроительном заводе, имеющим кузнечно-штамповочное, термическое, механическое, механосборочное производства. Материал для их изготовления: сталь в том числе - нержавеющая, сплавы на основе титана и алюминия. Часть деталей и узлов для МТС могут быть покупными, например рама 3 (фиг.4) с колесами, гибкий вал 15 (фиг.4, 8) и другое.
Или такой вариант: создают сборочное производство МТС из покупных узлов и деталей от специализированных предприятий, расположенных как внутри нашей страны, так и в других странах.
Источники информации
1. «Мускульные транспортные средства». Интернет, Википедия.
2. «Трансмиссии мускульных транспортных средств». Интернет, Википедия.


Мускульное транспортное средство содержит раму и колеса, два скрепленных между собой желоба, расположенные с обеих сторон рамы и имеющие возможность поворота вокруг каретки, два ролика, перемещающихся по соответствующему желобу и вращающихся на оси с буртом кулисного камня, к которому соосно закреплена ось с буртом педали. Кулисный камень имеет возможность перемещаться в пазу кулисы, закрепленной на валу каретки. Обеспечивается равномерный износ колес. 2 н. и 1 з.п. ф-лы, 9 ил.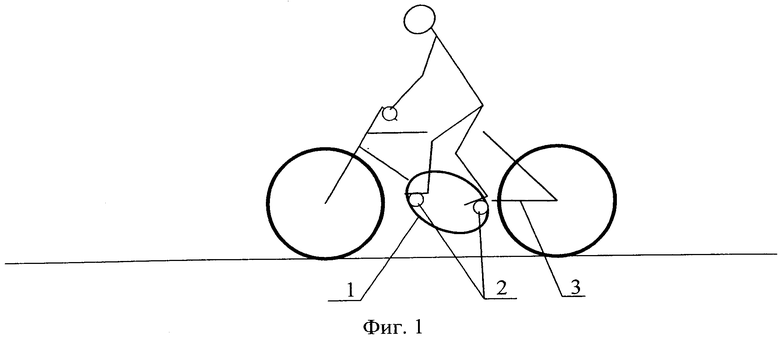
1. Мускульное транспортное средство, содержащее раму и колеса, два желоба овальной формы, расположенные с обеих сторон рамы, скрепленные между собой и имеющие возможность поворота вокруг каретки, два ролика, каждый из которых имеет возможность перемещаться по соответствующему желобу и одновременно вращаться на оси с буртом кулисного камня, к которому соосно закреплена ось с буртом педали, причем кулисный камень имеет возможность перемещаться в пазу кулисы, закрепленной на валу каретки.
2. Мускульное транспортное средство по п.1, отличающееся тем, что содержит гибкий вал с резьбой на его наконечниках, один конец которого установлен в проушине желобов и ввернут в стяжную муфту, которая закреплена на раме, а другой конец которого установлен на кронштейне, который закреплен на ручке руля, причем наконечник ввернут в указатель для градусной шкалы, закрепленной на кронштейне и на наконечнике установлен маховик, при этом параметры резьбы на обоих наконечниках гибкого вала могут отличаться друг от друга.
3. Способ движения мускульного транспортного средства, в котором применяется мускульное транспортное средство по п.1 или 2.
| RU 2011104560 A, 20.08.2012 | |||
| WO 2004092003 A1, 28.10.2004 | |||
| US 6540244 B1, 01.04.2003 |

