ССЫЛКИ НА СМЕЖНЫЕ ИЗОБРЕТЕНИЯ
В настоящем документе испрашивается приоритет предварительной заявки США с серийным № 61/150391 под названием «Усовершенствование хирургического сшивающего инструмента с электроприводом», поданной Ryan J. Laurent 06 февраля 2009 года.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Пример хирургического сшивающего инструмента, пригодного для эндоскопического применения, описан в патенте США № 5465895 (включен в настоящий документ путем ссылки), в котором описан эндокатер с отдельными закрывающей и пусковой функциями. Примером хирургического сшивающего инструмента с электроприводом является публикация США № 2007/0175958 (включена в настоящий документ путем ссылки), выдержки из которой, представленные в настоящем документе, подробно описывают его основные функции, улучшения, предпосылки создания и составные части. В заключительной части описываются дополнительные улучшения системы.
Выдержка из предпосылок создания и краткого описания изобретения патента № US2007015958: «Хирург, использующий данное устройство, имеет возможность зафиксировать бранши на ткани до пуска устройства. После того, как хирург убедится в том, что бранши надежно удерживают ткань, он может запустить хирургический сшивающий инструмент с одним или несколькими ходами, в зависимости от модификации устройства. Под действием хирургического сшивающего инструмента происходит рассечение и сшивание ткани. Одновременное рассечение и сшивание тканей исключает осложнения, которые могут возникать при поочередном выполнении этих операций разными хирургическими инструментами, например только режущими или только сшивающими.
Особое преимущество возможности фиксирования ткани перед пуском инструмента состоит в том, что хирург имеет возможность убедиться (с помощью эндоскопа) в достижении места, в котором предполагается выполнить рассечение, а также в том, что бранши удерживают достаточное количество ткани. В противном случае противолежащие бранши эффектора могут быть сведены слишком близко, особенно на дистальных концах, неэффективно фиксируя скобы в рассеченной ткани. С другой стороны, избыточное количество зажатой ткани может приводить к заклиниванию и незавершенности процесса сшивания.
С каждым последующим поколением эндоскопические сшивающие/рассекающие инструменты усложняются, увеличивается количество функциональных возможностей. Одной из основных причин этого является стремление к снижению усилия пуска до такого уровня, на котором могут работать все или большинство хирургов. Одним из известных решений для снижения усилия пуска является углеродный или электрический двигатель. Данные устройства не имеют преимуществ над традиционными устройствами с ручным управлением, но по другой причине. Как правило, хирургам удобнее ощущать воздействие силы, пропорциональной воздействию, которое испытывает концевой эффектор при наложении скобы, с верхним пределом, находящимся в рамках возможностей большинства хирургов (как правило, приблизительно 66,7-133,4 Н (15-30 фунтов)), чтобы иметь возможность убедиться в том, что цикл рассечения/сшивания завершен. Также, как правило, им удобнее сохранять контроль при наложении скобы и иметь возможность остановить процесс в любой момент, если сопротивление рукоятки устройства слишком велико или по любым другим клиническим причинам. Данные возможности создания обратной связи в представленных в настоящее время эндокатерах с электроприводом должным образом не реализованы. В результате этого хирурги, как правило, предпочитают не использовать эндокатеры с электроприводом, в котором операция по рассечению/сшиванию инициируется простым нажатием кнопки.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В целом, настоящее изобретение относится к автоматическому хирургическому режущему и сшивающему инструменту, который предоставляет обратную связь пользователю относительно расположения, силы и/или приведения концевого эффектора в рабочее положение. В различных вариантах осуществления инструмент также дает возможность оператору управлять концевым эффектором, в том числе возможность останавливать процесс наложения скоб при необходимости. Инструмент может также содержать два пусковых устройства в рукоятке - закрывающее пусковое устройство и пусковой механизм, приводимые в действие по отдельности. Когда оператор инструмента притягивает закрывающее пусковое устройство, ткани могут захватываться концевым эффектором. Затем, когда оператор притягивает пусковой механизм, двигатель через цепь зубчатых передач привода и вращение группы основного приводного вала может приходить в движение, что заставляет скальпель, расположенный на концевом эффекторе, рассекать зажатую ткань.
В различных вариантах осуществления инструмент может включать систему усиления с обратной связью по усилию и контролем для снижения пускового усилия, которое необходимо приложить оператору для пуска с целью завершения операции по рассечению. В таких вариантах осуществления пусковой механизм может являться частью цепи зубчатых передач привода группы основного приводного вала. Таким образом, оператор может получать обратную связь о силе, приложенной к рассекающему инструменту. То есть сила нагрузки на пусковой механизм может соотноситься с силой нагрузки, приложенной к рассекающему инструменту. Также в таком варианте осуществления, поскольку пусковой механизм является частью цепи зубчатых передач привода, сила, приложенная оператором, может дополнять силу, приложенную к двигателю.
В соответствии с различными вариантами осуществления, после того, как пусковой механизм был притянут на определенное начальное расстояние (например, пять градусов), может срабатывать двухпозиционный переключатель, который направляет двигателю сигнал к вращению с заданной скоростью, запуская группу приводного вала и концевой эффектор. В соответствии с другими вариантами осуществления, может использоваться пропорциональный датчик. Пропорциональный датчик может направлять двигателю сигнал к вращению со скоростью, пропорциональной силе, приложенной оператором к пусковому механизму. Таким образом, поворот пускового механизма в целом соотносится с положением рассекающего инструмента в концевом эффекторе (например, полностью в рабочем состоянии или полностью втянут). Кроме того, оператор может прекратить притягивать пусковой механизм на каком-либо этапе хода для остановки двигателя и, следовательно, остановки рассекающего движения. Кроме того, могут быть использованы датчики для определения начала хода концевого эффектора (т.е. полностью втянутое положение) и конца хода (т.е. полностью рабочее положение) соответственно. Таким образом, датчики могут образовывать адаптивную систему управления для контроля приведения концевого эффектора в рабочее положение, которая находится за пределами замкнутой системы двигателя, цепи зубчатых передач привода и концевого эффектора.
В других вариантах осуществления пусковой механизм может не включаться непосредственно в цепь зубчатых передач привода, использующуюся для приведения в действие концевого эффектора. В таких вариантах осуществления может быть использован второй двигатель для приложения силы к спусковому механизму, чтобы инициировать приведение скальпеля в рабочее положение в концевом эффекторе. Второй двигатель может управляться по результатам измерения инкрементного вращения группы основного приводного вала, что может осуществляться круговым датчиком положения. В таком варианте осуществления положение пускового механизма после поворота может соотноситься с положением скальпеля в концевом эффекторе. Кроме того, для управления основным двигателем (т.е. двигателем, запускающим основной приводной вал) может использоваться двухпозиционный переключатель или пропорциональный датчик.
В различных вариантах осуществления в основании концевого эффектора может находиться приводной винт, предназначенный для перемещения рассекающего инструмента (например, скальпеля). Также концевой эффектор может включать картридж со скобами для скрепления рассеченных тканей. В соответствии с другими вариантами осуществления, для сшивания (скрепления) рассеченных тканей могут использоваться другие средства, в том числе радиоволновая энергия и адгезивы.
Кроме того, инструмент может включать механическую запирающую систему. Механическая запирающая система может включать удлиненный желоб, имеющий зажимной элемент, например упорную пластину, шарнирно связанную с желобом для фиксации ткани, захваченной концевым эффектором. Пользователь, притягивая закрывающее пусковое устройство, может посредством механической запирающей системы инициировать зажимающее движение концевого эффектора. После того как зажимной элемент зафиксирован на месте, оператор может выполнить манипуляцию по рассечению, притягивая отдельный пусковой механизм. Это может вызвать продольное перемещение скальпеля вдоль желоба с рассечением ткани, захваченной концевым эффектором.
В различных вариантах осуществления инструмент может включать вращательную группу основного приводного вала, приводящую в действие концевой эффектор. Кроме того, основной приводной вал может включать шарнирное сочленение, дающее возможность управления концевым эффектором. Шарнирное сочленение может включать, например, группу конических зубчатых колес, универсальный шарнир или гибкий кабель кручения, способный передавать силу кручения к концевому эффектору.
Другие особенности настоящего изобретения относятся к различным механизмам блокировки закрывающего пускового устройства на нижней части пистолетной рукоятки. Такие варианты осуществления освобождают пространство в рукоятке непосредственно над или за пусковыми механизмами для других деталей инструмента, включая компоненты цепи зубчатых передач привода и механической запирающей системы.
Представленное в настоящем документе описание показывает, как может быть осуществлено автономное эндоскопическое сшивающее устройство с приводом, организованным на основе зубчатых передач и питанием от батареи.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
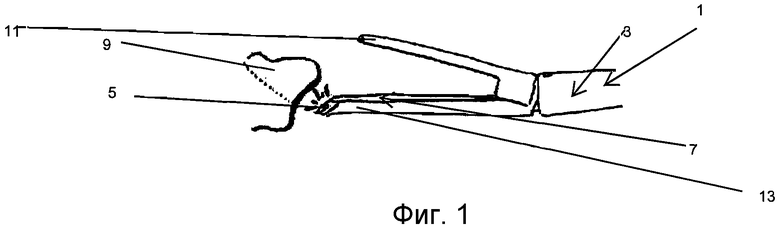
На фиг.1 представлено перспективное изображение дистального конца хирургического сшивающего инструмента в соответствии с принципами настоящего изобретения.
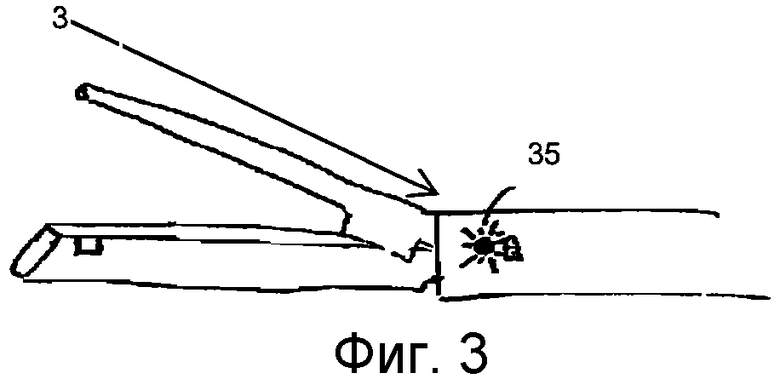
На фиг.2 представлено перспективное изображение дистального конца хирургического сшивающего инструмента в соответствии с принципами настоящего изобретения с картриджем, извлеченным из желоба.
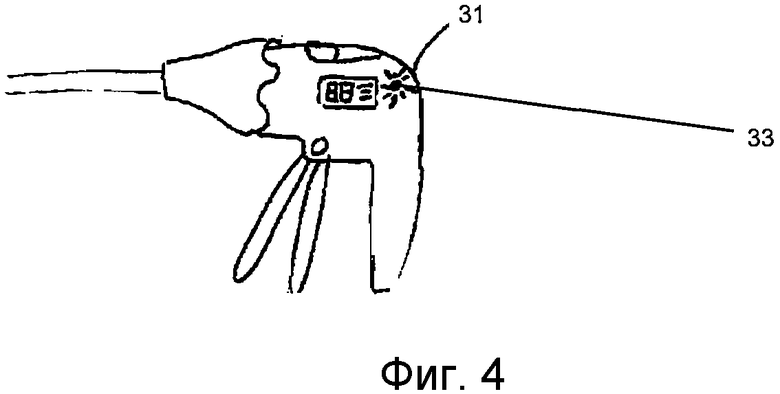
На фиг.3 представлено изображение дистального конца хирургического сшивающего инструмента в соответствии с принципами настоящего изобретения, аналогичное фиг.1, на котором показан индикатор блокировки.
На фиг.4 представлено перспективное изображение проксимального конца хирургического сшивающего инструмента в соответствии с принципами настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Способы освещения концевого эффектора/операционного поля эндокатером с усилителем. В настоящее время, когда концевой эффектор находится в рабочем или почти рабочем положении, хирургу бывает затруднительно работать в месте операции ввиду теней от сопредельных структур, а также ввиду того, что концевой эффектор может быть полностью скрыт за какой-либо структурой. На фиг.1 показан дистальный конец 3 хирургического сшивающего инструмента 1 в соответствии с принципами настоящего изобретения, включающий упорную пластину 11, корпус картриджа со скобами 7 и желоб 13. Как видно на данном чертеже, дополнительный источник света 5 может быть размещен на конце корпуса картриджа 7, освещая ткань 9. Такой источник света может представлять собой любое сочетание средств преобразования электрической энергии в свет, включая, помимо прочего, полупроводники (например, светодиоды), традиционные лампы накаливания, электролюминесцентные лампы и лазер. Это позволит хирургу не только освещать место операции, но и просвечивать структуры, чтобы увидеть внутренние компоненты, например сосудистую сетку, а также позволит хирургу с помощью лазерной указки через традиционные оптические устройства указывать другим участникам операции на интересующие участки.
Это легко осуществляется путем размещения одного или нескольких контактов 21 в задней части корпуса картриджа 7, которые будут соприкасаться с контактами 23 в желобе, что позволит хирургу по мере необходимости включать освещение, подавая питание к контактам с помощью переключателя, расположенного на рукоятке 31. Такой переключатель может иметь переменную силу, что необходимо для контроля скорости включения основного устройства.
Как было указано выше, в публикации в США № 2007/0175949 также на фиг.45-47 описаны устройства вывода данных, которые могут отображать, помимо прочего, позиционную обратную связь от концевого эффектора, состояние блокировки, количество запусков и т.д., таким образом, сводя к минимуму одну из наиболее значительных сложностей для пользователя - определение состояния устройства, в особенности состояние блокировки, без запуска устройства. Для пользователя также будет полезна дополнительная немедленная обратная связь о состоянии картриджа, когда он загружен. Как и в предыдущей заявке, информация может выводиться на индикатор блокировки на рукоятке 31. Индикатор 33 (например, светодиод, стеклянная колба, жидкокристаллический дисплей, звуковой оповещатель, вибратор и т.д.) может передавать исключительно состояние устройства или механизма, блокирующего картридж, предоставляя хирургу данную информацию. Такой светодиод может быть расположен на рукоятке. Кроме того, индикатор 35 может быть расположен вблизи дистального конца 3, что позволит предоставить хирургу и специалисту, заполняющему картридж, оперативную информацию о готовности картриджа к работе. Это возможно реализовать с помощью переключателя или набора контактов, непосредственно связанных с механической блокировкой. Переключатель или контакты замыкают цепь, при этом индикатор выводит соответствующую информацию. Замыкание контактов может происходить с помощью проводящего элемента в салазках (часть 33 публикации № 20070175958), а два контакта могут находиться в проксимальной части желоба (часть 22). Другой способ определения состояния блокировки - опосредованно, через состояние инструментов (пример 1 - отсутствие попытки запуска при загруженном картридже укажет на отсутствие блокировки, пример 2 - рабочий инструмент в отсутствие нового картриджа укажет на блокировку и т.д.). Другим вариантом осуществления может быть размещение светодиода или визуального сигнала индикации на самом картридже. Когда картридж установлен (до щелчка) на место, контакты замыкаются, что позволяет подавать к картриджу питание. Необходимость выталкивания картриджа определяется не только механической блокирующей остановкой продвижения скальпеля. С помощью цепи, активирующей светодиод на картридже, хирург может видеть на мониторе, что картридж заблокирован. Данный принцип может быть также расширен путем размещения небольшой батареи или другого зарядного аккумулятора в картридже для исключения необходимости питания от основного устройства. Также схема картриджа может быть разработана таким образом, чтобы индикатор блокировки загорался при закрывании устройства для информирования пользователя о нахождении в устройстве отработанного картриджа.
Индикаторная обратная связь для сочленения с силовым приводом и цвет картриджа. Считается, что для хирурга будет удобной индикация типа установленного картриджа (цвет) и угла поворота в сочленении. Индикация угла поворота в сочленении может осуществляться несколькими способами, включая числовой или графический, например в виде дуги светодиодов. Такой индикатор может быть расположен на рукоятке в любом удобном месте или на валу устройства, проксимальнее концевого эффектора. Обратная связь от концевого эффектора может быть пассивной или активной. Активная связь, показывающая угол, может активировать дополнительные светодиоды. При пассивной связи может активироваться только половина круга светодиодов, таким образом, хирург сможет интуитивно понять, как повернут концевой эффектор. При дальнейшем изучении хирургических манипуляций становится все более очевидным, что взгляд хирурга должен быть зафиксирован на месте проведения манипуляции, а не на рукоятке инструмента. Также очевидна необходимость полной обратной связи для хирурга о состоянии устройства. Угол поворота может отображаться на самом шарнирном сочленении лампами, светодиодами и т.д., обозначающими различные углы, либо на небольшом жидкокристаллическом дисплее, показывающем угол в градусах. Это позволит хирургу получать обратную связь об отклонении от прямого положения, так чтобы он/она могли легко изменить положение инструмента после извлечения или повторного введения. Следующей задачей является четкая индикация того, какого цвета картридж установлен в устройстве. Этого можно достигнуть путем цветового кода освещения как на концевом эффекторе, так и на картридже. Данная информация может также передаваться обратно в рукоятку и отображаться на «запасном» дисплее, чтобы свести к минимуму возможность ошибки с картриджем, который находится в бранше. Другое усовершенствование может включать небольшую пластинчатую пружину, контактирующую с проксимальной поверхностью картриджа, которая показывает наличие минимального давления на ткань в эффекторе. Такое минимальное давление по меньшей мере указывает на то, что применительно к тонкой ткани используется картридж для толстой ткани; при несоответствующем давлении ткани на поверхность индикация будет отсутствовать.
Автоматическое продвижение и втягивание электрического эндокатера. Во время работы сшивающего инструмента должны быть выполнены несколько шагов в установленном порядке. После блокировки закрывающего пускового устройства следующим шагом является инициация рабочего цикла. Следующим последовательным шагом после пуска является втягивание системы. При использовании дополнительного источника питания, помимо пользователя (т.е. батарей или пневматики), система способна самостоятельно выполнять шаги, инициированные пользователем, и тем самым снижать степень сложности устройства. Для автоматического начала этих шагов могут быть добавлены внутренние переключатели или схемы. Следующей задачей является обеспечение возможности для пользователя интуитивно задерживать, замедлять или останавливать автоматическое срабатывание. Например, для того, чтобы замедлить или остановить автоматическую систему возврата нажатием пользователем кнопки во время втягивания, может использоваться кнопка пуска, подобная кнопке для запуска устройства тактильной обратной связи в патенте № 11/344035. После снятия давления с кнопки автоматический возврат может возобновиться. Такой же принцип может быть реализован для автоматического запуска, в случае если система не требует наличия кнопки для пуска, но устройство управления, сдвинутое при движении скальпеля, может быть отжато пользователем для остановки или замедления приведения устройства в рабочее положения, что может быть излишним, если очевидно, что система работает правильно.
Предотвращение случайного срабатывания/предотвращение случайного срабатывания эндокатера с усилителем. С появлением систем усиления, которые снимают ограничения относительно функциональности устройства в соответствии с силовыми возможностями пользователя, распространенной проблемой может стать случайное начало рабочего цикла. Это может быть связано с упрощением возможности нажатия на устройство управления активацией и запуска инструмента с последующим отключением блокировки картриджа и, предположительно, заклиниванием его в ткани, так как пользователь не знает, что он инициировал запуск операции. Для устранения данной проблемы могут использоваться дополнительные переключатели или кнопки разблокировки активатора, предназначенные для разблокировки пускового механизма. Данная система аналогична системам парных переключателей, используемых в бензомоторных пилах, а также в армейской системе защиты от самопроизвольного срабатывания. Вспомогательный переключатель может снимать блокировку пускового механизма, а также пропускать ток к устройству управления.
Использование нестерильной батареи в стерилизованном устройстве/упаковка как стерильный барьер при повторном использовании батарей. Предположительно, существует необходимость в разработке способа установления нестерильных батарей (предположительно, с электронной схемой, в случае если заказчику необходима программируемая логическая схема). В сфере использования ортопедической дрели уже разработан патент на установку нестерильных батарей в отдельно стерилизуемом устройстве с возможностью повторного использования. Данное усовершенствование направлено на улучшение принципов использования одноразовой стерильной упаковки для устройства с целью обеспечения стерильности инструмента во время установки нестерильных батарей. Другим усовершенствованием является оснащение инструмента крышкой люка, закрывающейся после установления батарей, но до извлечения устройства из последней стерильной упаковки. В люк устанавливают нестерильную батарею, которая может стать источником инфицирования стерильного операционного поля. Данный способ может предусматривать использование дополнительного слоя упаковки, имеющего область перфорации, через которую можно протолкнуть батарею, разрывание дополнительного слоя с освобождением батареи или работу с набором электродов батареи, прорывающих упаковку выступающими концами игольчатых контактов батареи при полном установлении. Альтернативой может являться наличие внутренних контактов в рукоятке (глубоко в полости для батареи), прорывающих стерильный барьер с размещением в гнездовых контактах блока батарей. Затем люк может быть закрыт с помощью стерильного уплотнителя системы. После этого с рукояткой можно работать в стерильных условиях обычным способом, как и с любым другим стерильным устройством.
Варианты осуществления навигатора/ датчик линейных перемещений и контроль параметров нагрузки двигателя: В патентах №№ 6646307 и 6716223 описаны механизмы измерения параметров вращения и связанного крутящего момента для контроля параметров двигателя и их оптимизации на основе определения пространственного положения концевого эффектора и нагрузки. В публикации США № 20070175958 на фиг.8-13 показан способ контроля линейного перемещения с использованием длины резьбовой части ведущего вала, а также принцип использования данного способа для контроля местоположения пускового устройства. Данный способ может использоваться для электронных способов контроля линейного перемещения. Концевой эффектор может определять свою длину и тип механическим способом: путем нажатия на по меньшей мере один пружинный фиксатор, что позволяет определять тип и длину рукоятки и запускать двигатель. Вращение двигателя может быть преобразовано из вращательного движения в линейное перемещение зубчатых реек или кабеля, которое затем может быть использовано для управления напряжением, силой тока и скорости двигателя для воздействия желаемым образом на линейное перемещение контрольного скользящего контакта. Контрольный скользящий контакт может быть непосредственно связан с приводом, двигающим скальпель. Такой контрольный скользящий контакт может иметь дискретные или непрерывные «места остановки», которым устройство определения состояния плунжера присваивает статус «максимальный переход к линейному перемещению» до втягивания.
Определение перезагрузок модулей двигателем с линейным перемещением: Полезной функцией хирургического инструмента является способность определять, какой концевой эффектор закреплен в инструменте. В хирургическом сшивающем инструменте с усилителем могут быть закреплены несколько типов концевых эффекторов. Кроме того, любой тип концевого эффектора может иметь по меньшей мере одну функцию и/или свойство, которые используются или подключаются выборочно. Описанные средства являются средствами определения закрепленного концевого эффектора. Необходимо обратить внимание на то, что типы концевых эффекторов, представленные ниже, не ограничиваются механически, пневматически или гидравлически присоединяемыми концевыми эффекторами. Определив тип концевого эффектора, инструмент может выполнить следующие действия: установить рабочие параметры, отобразить доступные функции и т.д.
Концевой эффектор имеет электрическую связь, которая создается после его установки в инструменте. Инструмент взаимодействует с концевым эффектором и считывает по меньшей мере один из нескольких типов сигналов. Положение переключателя или контактов указывает на то, какой тип концевого эффектора был установлен. На пассивном элементе измеряется полное сопротивление, результат указывает на то, какой тип концевого эффектора установлен.
Концевой эффектор имеет радиочастотный канал связи с инструментом, данные между концевым эффектором и инструментом передаются по меньшей мере в одном направлении.
Концевой эффектор имеет акустическую линию связи с инструментом, данные между концевым эффектором и инструментом передаются по меньшей мере в одном направлении.
Концевой эффектор имеет оптическую линию связи с инструментом, данные между концевым эффектором и инструментом передаются по меньшей мере в одном направлении.
Концевой эффектор имеет механическую связь, зацепляющую элементы (такие как переключатели или контакты) инструмента, определяя и передавая данные между концевым эффектором и инструментом по меньшей мере в одном направлении.
Активно регулируемая высота скоб в эндокатере с усилителем. В течение многих лет предпринимаются попытки обеспечить возможность регулирования высоты скоб в зависимости от толщины и типа ткани. Последние публикации №№ 11/231456 и 11/540735 были посвящены гибкому соединительному элементу или креплениям, которые позволяют расширить зазор в инструменте под действием нагрузки от более толстой ткани, зажатой в устройстве. Такая пассивно изменяемая высота скоб учитывает толщину ткани, создавая более крупные формы скоб. Введение в инструмент источника питания позволяет использовать электричество для изменения высоты внутреннего элемента в пределах динамического соединительного элемента с активным изменением высоты скоб хирургом или путем задания в инструменте желаемой высоты. Такой внутренний элемент может быть выполнен из материала с памятью формы, температура которого изменяется под действием электричества, что позволяет ему изменять пространственную высоту в зависимости от конфигурации. Следующим возможным способом может быть добавление электроактивного полимера, который под воздействием электрического поля может менять свою высоту и ширину. Третий вариант осуществления заключается в использовании традиционного линейного электрического элемента с шаговым приводом, который может быть приведен в движение при помощи храпового механизма небольшого регулируемого винтового элемента в соединяющей штанге, регулирующей его высоту.
Изобретение относится к медицине. Хирургическое сшивающее устройство включает рукоятку и удлиненный стержень. Стержень имеет проксимальный конец, закрепленный в рукоятке, и выступающий из нее дистальный конец. Концевой эффектор включает пару браншей. Бранши закреплены на его проксимальном конце с возможностью вращения и перемещения между открытым и закрытым положениями. Картридж содержит множество хирургических скрепляющих элементов и прикреплен к концевому эффектору. Электрический привод обеспечивает наложение хирургических скрепляющих элементов. Электрический обратный механизм перемещает удлиненный элемент из крайнего дистального положения внутри концевого эффектора к проксимальному положению. Электрический обратный механизм перемещает удлиненный элемент в проксимальном направлении после продвижения удлиненного элемента в крайнее дистальное положение посредством передвижения пускового устройства в открытое положение. Движение удлиненного элемента в проксимальном направлении может быть остановлено возвращением пускового устройства в его закрытое положение. 4 ил.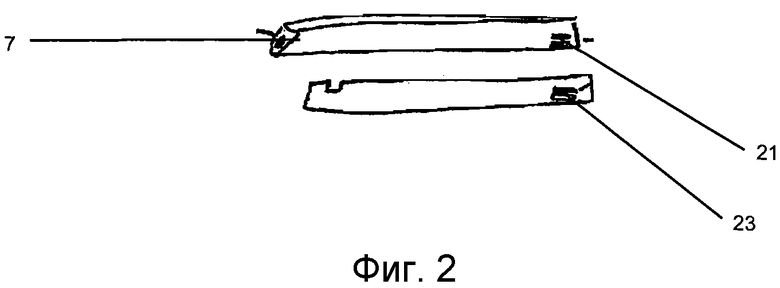
Хирургическое сшивающее устройство, включающее:
a) рукоятку, удлиненный стержень, имеющий проксимальный конец, прикрепленный к указанной рукоятке, и дистальный конец, выступающий из нее, концевой эффектор, включающий пару браншей, закрепленных на его проксимальном конце с возможностью вращения и перемещения между открытым и закрытым положениями, и картридж, содержащий множество хирургических скрепляющих элементов; причем указанный картридж прикреплен к указанному концевому эффектору;
b) электрический привод для наложения указанных хирургических скрепляющих элементов, содержащий источник питания и двигатель, причем указанный привод включает удлиненный элемент, проходящий через указанный стержень и способный продвигаться в дистальном направлении внутрь указанного концевого эффектора для наложения указанных скоб и назад в проксимальном направлении из указанного концевого эффектора;
c) пусковое устройство, прикрепленное к указанной рукоятке и имеющее открытое и закрытое положение; и указанное пусковое устройство приводит в действие указанный привод при нахождении в закрытом положении; и
d) электрический обратный механизм, перемещающий указанный удлиненный элемент из крайнего дистального положения внутри указанного концевого эффектора к проксимальному положению; причем указанный электрический обратный механизм продвигает указанный удлиненный элемент в проксимальном направлении после того, как указанный удлиненный элемент продвинулся в указанное крайнее дистальное положение, посредством передвижения указанного пускового устройства обратно в указанное открытое положение, при этом после активации указанного обратного механизма и пока обратный механизм двигает указанное пусковое устройство обратно в указанное открытое положение, движение указанного удлиненного элемента в проксимальном направлении может быть остановлено возвращением указанного пускового устройства в его закрытое положение.
| Сигнализатор уровня | 1991 |
|
SU1813202A3 |
| US 7422136 B1, 09.09.2008 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| АППАРАТ ДЛЯ ЛАПАРОСКОПИЧЕСКОЙ ХИРУРГИИ | 1994 |
|
RU2071730C1 |
| АППАРАТ О.Б.ОСПАНОВА ДЛЯ КОМПРЕССИОННЫХ АНАСТОМОЗОВ | 1998 |
|
RU2128012C1 |

