Ссылка на заявки, находящиеся в рассмотрении
Данная заявка истребует приоритет предварительной патентной заявки США № 61/230879, поданной 3 августа 2009 года, и непредварительной патентной заявки США № 12/572752, поданной 2 октября 2009 года, которая, в свою очередь, истребует приоритет предварительной патентной заявки США № 61/220734, поданной 26 июня 2009 года.
Область техники
Данное изобретение в общем случае относится к приборам контроля, предназначенным для обнаружения аномалий в различных трубопроводах, а конкретнее - к линейным приборам контроля, в которых используются методы детектирования рассеяния магнитного потока.
Уровень техники
Многие установленные трубопроводы можно проверять с использованием метода рассеяния магнитного потока (MFL), в первую очередь - с целью установления аномалий с потерями металла. Известно, что рассеяние магнитного потока предсказуемым образом реагирует на аномалии в стенке трубопровода, так как главная ось аномалии потери металла и угла поля меняется. Данный эффект подтверждается как экспериментальными результатами, так и результатами моделирования и так же широко описан в литературе.
Частично из-за ограничений, налагаемых сбором данных, хранением данных и конструкциями магнитной цепи, в большинстве линейных приборов контроля используются осевые намагничивающие устройства (смотрите, например, патент США № 6820653 Шемпф (Schempf) и др.). Однако современные конструкции намагничивающих устройств с осевым полем затрудняют, а в некоторых случаях делают невозможным идентификацию и квантификацию особо узких осевых признаков. Для таких классов признаков в течение последнего десятилетия поставщиками услуг контроля продаются и применяются решения, использующие магнитное поле в круговом или поперечном направлении. Однако из-за ограничений физики характеристики и точность приборов контроля с поперечным магнитным потоком (TFI) в общем случае меньше, чем у приборов с осевым полем для обычных аномалий с потерей металла.
Кроме того, эти TFI приборы обычно требуют минимум двух сторон намагничивающих устройств для достижения адекватного покрытия, что делает встраивание их в существующий осевой MFL прибор непрактичным или сложным.
Для тех трубопроводов, которые могут иметь особо узкие признаки (элементы) с потерей металла или определенные классы аномалий сварных швов, стандартные приборы с осевым полем не обеспечивают адекватные возможности обнаружения и квантификации. В таких случаях, для приборов, основанных на MFL, первичные или дополнительные обмеры проводятся с применением TFI прибора. В то время как TFI приборы могут быть способны к обнаружению особо узких аномалий и определенных аномалий сварных швов, они также обнаруживают все остальные особенности с объемными потерями металла, обычно встречающиеся в трубопроводах, затрудняя тем самым процесс идентификации целевых классов аномалий.
Одна из наиболее ранних TFI компоновок описана в патенте США № 3483466 (Крауч (Crouch) и др.). В патенте Крауча раскрыта пара электромагнитов, расположенных перпендикулярно друг другу, с детекторами, такими как магнитометры или измерительные (поисковые) катушки, расположенные на каждой стороне магнитов. За исключением случаев использования постоянных магнитов и датчиков типа прибора Холла, компоновка Крауча остается основой для самых современных реализаций. Кроме того, некоторые конструкции подразумевают сегментированные или отдельные дискретные магниты, которые в большинстве случаев сохраняют поперечное или круговое направление поля. Например, в патенте США № 3786684 (Вайерс (Wiers) и др.) раскрыты отдельные магниты, расположенные в матрице наклонно к оси трубы, при этом поля каждой матрицы перпендикулярные другим. Однако данная компоновка ограничивает поле до секций и областей между полюсами каждого отдельного магнита. Кроме того, малые промежутки между полюсами, требуемые для реализации типа Вайерса, уменьшают длину магнитной цепи, в результате чего прибор страдает от кинематических эффектов, а также маскируют, искажают или ухудшают качество данных для сварных швов, впадин и других аномалий.
Другие конструкции подразумевают детально проработанные сложные геометрии множественных секций намагничивающих устройств и детально проработанные механические компоновки, такие как винтовые приводы, зубчатые передачи и колеса, предназначенные вызывать спиральное или винтовое движение секции намагничивающего устройства. Например, в патенте США № 5565633, Вернике (Wernicke) раскрыто механически сложное устройство для применения вместе с секциями намагничивающих устройств, имеющими две и более магнитных цепи, а также изобилие воспринимающих узлов в одном варианте осуществления, магнитные блоки упорядочены с параллельными полосами, расположенными по спирали. В другом варианте магнитные блоки представляют собой скрученные пары полюсов, смещенные аксиально. Оба варианта осуществления требуют механически вызываемого вращения для достижения полного покрытия внутренней поверхности трубы. Аналогично патенту Вернике, патент США № 6100684, Рамуата (Ramuat) раскрывает, по существу, компоновку с намагничиванием поперечным полем, которая подразумевает множество секций намагничивающих устройств и сложную компоновку колес для индуцирования винтового движения секций и достижения перекрытия или полного покрытия стенки трубы. В патенте США № 7548059 (Томпсон (Thompson) и др.) описаны два ползуна (полосы), включающих в себя неподвижные магниты, упорядоченные в близко расположенных парах, создавая номинально поперечное поле, закручивающееся по спирали вокруг трубы. Данный прибор, который включает в себя многообразие движущихся частей, таких как опорная шина, шкивы и пружины, требует значительного усложнения для достижения гибкости, достаточной для приспособления к изгибам трубопровода. Кроме того, магниты в данной компоновке индуцируют поле между двумя параллельными полюсами, образуя единый замкнутый контур между полюсами отдельных дискретных магнитных блоков.
Аналогично патенту Томпсона магниты, используемые в прототипе, описываются как блоки, без упоминаний гибкой, или удобной, верхней поверхности, используемой для магнитного блока. Использование жесткой компоновки контактов для магнитной цепи ухудшает качество данных, вводя на пути магнитного поля воздушные зазоры или зоны переменного магнитного сопротивления - во впадинах или вдоль сварных швов и других высадок, которые могут присутствовать внутри трубопровода. Для определенных классов особенностей искажения, создаваемые в окружающем поле, маскируют или иначе искажают сигналы рассеяния потока, присутствующие вследствие интересующих особенностей. Любые магнитные аномалии, существующие внутри впадин и зон сварных швов, имеют большое значение из-за своего наличия внутри этих зон и по существу представляют области, где качество данных является критичным.
Кроме того, прототип требует применения большого числа полюсов или поверхностей в компоновке с непосредственными контактами с поверхностью стенки трубы. Такая компоновка может привести к чрезвычайно большим силам трения или сопротивлению движению, испытываемым сборкой намагничивающего устройства, препятствуя или мешая тем самым его использованию в применениях, требующих более низкого трения.
Как уже обсуждалось, в настоящее время операторы трубопроводов могут инспектировать много установленных трубопроводов, используя метод рассеяния магнитного потока (MFL), в основном с целью идентификации аномалий с потерей металла. Однако для определенных классов аномалий современные конструкции намагничивающих устройств с осевым полем, применяемые в методе MFL, затрудняют, а в некоторых случаях делают невозможным обнаружение и квантификацию особо узких трещинообразных или подобных трещинам осевых особенностей (дефектов). Чтобы обеспечить обнаружение и квантификацию этих особенностей, изучаются и используются альтернативные методы, использующие акустические (ультразвуковые) волны. Эти акустические волны обычно генерируются внешними пьезоэлектрическими преобразователями или электромагнитоакустическими датчиками (ЕМАТ).
Исполнения ЕМАТ представляют собой обычно один из двух основных типов: Лоренца и магнитострикционные. Оба типа требуют присутствия внешнего подмагничивающего поля. В ЕМАТ типа Лоренца подмагничивающее поле перпендикулярно стенке трубы и взаимодействует с путями, индуктированными вихревым током или напряжением в стенке трубы. ЕМАТ магнитострикционного типа использует подмагничивающее поле, которое в плоскости стенки трубы осевое или круговое, и взаимодействует с магнитноиндуцированными напряжениями.
В индустрии неразрушающего контроля хорошо известно, что магнитострикция в стали значительно более эффективна при генерировании горизонтально поляризованных поперечных (SH) акустических волн, когда подмагничивающее поле находится под углом относительно проводника сенсорной катушки ЕМАТ. Этот результат был проверен изобретателями в ходе первоначальной разработки матрицы ЕМАТ датчика согласно изобретению, раскрытой в данном документе. В процессе изучения было выявлено, что несколько бороздок, выполненных в тестовых пластинах, не обнаруживались при применении осевого подмагничивающего поля. Поворот угла подмагничивающего поля относительно оси перемещения и ЕМАТ датчика обеспечил увеличение в измеряемом сигнале приблизительно на 20 децибел. Такая компоновка давала значительно более сильный ответный сигнал по сравнению с электронным шумом, результатом чего являлось четкое показание трещин на относительно однородной базовой линии.
Следовательно, применения SH волн, использующие сенсорные катушки ЕМАТ, расположенные под углом к магнитному полю, обычно превосходят применения, где линии плоскости поля параллельны проводникам сенсорной катушки (смотрите, например, опубликованную патентную заявку Германии №10/2007/0058043, правопреемником которой является Rosen Swiss AG). Обнаружение и квантификация коррозионного растрескивания под напряжением (SCC) является одним из основных типов целевых аномалий данного метода. В дополнение к SCC, которое типично является аксиально ориентированным, известно, что поперечные (кольцевые) сварные швы, имеющие круговое расположение, проявляют особенности (дефекты), подобные трещинам. Следовательно, чтобы система ЕМАТ была глобально эффективна, требуется способ, легко адаптируемый для обнаружения как осевых, так и круговых признаков.
В линейных приборах контроля прототипа используются кольцевые матрицы постоянных магнитов для намагничивания трубы в направлении, параллельном оси трубы. Для получения полезного угла между подмагничивающим полем и сенсорными катушками сенсорные катушки поворачивают к оси трубы (смотрите, например, патентную заявку Канады № СА2592094, Алерс (Alers) и др.). SH волны падают на плоскость аксиально ориентированного SCC под тем же самым углом. Следовательно, отражения SH волн от SCC эффективно обнаруживаются только приемными сенсорными катушками, расположенными сбоку от и повернутыми к передающей катушке. Кроме того, для измерения затухания применяемые для обнаружения нарушения связности покрытия используют приемные катушки, расположенные диагонально и повернутые к передающим катушкам. Эти приемные катушки затухания смещены в круговом направлении таким образом, чтобы они были на одной линии с передаваемой волной. Ощутимое увеличение амплитуды принимаемого сигнала является указанием нарушения связности покрытия.
Существует необходимость в ЕМАТ приборе, обеспечивающем полное покрытие поверхности внутренней стенки трубы без необходимости в механически сложных конструкциях и создающем поле, которое можно использовать для обнаружения осевых или круговых объемных дефектов или нарушений покрытия при помощи ЕМАТ датчиков.
Сущность изобретения
Прибор контроля трубопровода по изобретению включает в себя, по меньшей мере, два полюсных магнита, расположенных около наружной поверхности корпуса прибора и ориентированных наклонно к центральной продольной оси корпуса прибора. Матрица датчиков обеспечена между противолежащими краями двух полюсных магнитов. Матрица датчиков включает в себя линейку или комплект (набор) сенсорных катушек, которые ориентированы под другим углом, чем полюсные магниты, относительно продольной оси корпуса прибора. Следовательно, матрица датчиков находится под углом относительно подмагничивающего поля, генерируемого полюсными магнитами. Полюсные магниты и матрица датчиков могут каждое продолжаться по длине корпуса прибора и иметь в общем случае винтовую форму. Предпочтительно, чтобы комплекты сенсорных катушек были перпендикулярны продольной оси корпуса прибора, но в зависимости от типа аномалии, подлежащей обнаружению, могли быть расположены параллельно продольной оси корпуса прибора.
Каждый комплект сенсорных катушек может быть расположен на 180° противоположно соответствующему комплекту сенсорных катушек, при этом часть противолежащих комплектов сенсорных катушек содержится в пределах общей круговой полосы прибора. Комплекты сенсорных катушек, находящиеся на одной стороне корпуса прибора, смещены друг от друга, будучи в общем случае равномерно разнесены друг от друга и эквидистантны от противолежащих краев наклонно ориентированных полюсных магнитов. Каждый комплект сенсорных катушек включает в себя, по меньшей мере, одну передающую катушку и, по меньшей мере, две противолежащие пары приемных катушек. Одна приемная катушка каждой пары может быть приемной катушкой RD, а другая - приемной катушкой RA. Так как комплекты сенсорных катушек повернуты относительно подмагничивающего поля, приемные катушки находятся на одной линии с передающими катушками и имеют такую же угловую ориентацию. Другими словами, приемные катушки ориентированы параллельно передающей катушке и их не нужно смещать по диагонали или поворачивать относительно передающей катушки.
Передающая катушка передает тональную посылку или сигнал, который падает на стенку проверяемого трубчатого элемента и возвращается назад к приемникам. Приемные катушки удалены относительно передающей катушки, так что сигнал, передаваемый передающей катушкой, не маскирует обнаружение отражаемого сигнала приемными катушками. Каждая приемная катушка стробируется для приема этих отражаемых сигналов, которые могут быть нормализованы в пределах целевой зоны взятия замеров и обнаружения аномалий в трубчатом элементе. Затем передатчик может передать второй сигнал после того, как первый сигнал прошел заданное число раз по окружности трубчатого элемента. В зависимости от ориентации комплектов сенсорных катушек относительно наклонно ориентированных магнитов матрица датчиков способна обнаруживать аномалии стенок как в осевом, так и в круговом направлении.
Задачей данного изобретения является предоставление прибора рассеяния магнитного потока (MFL), который реагирует на широкий диапазон аномалий, способных генерировать сигналы рассеяния магнитного потока. Другая задача изобретения - обеспечить MFL прибор, способный к 360° покрытию внутренней стенки трубы при использовании одного намагничивающего устройства, без необходимости множественных секций намагничивающих устройств, намагничивающих устройств или относительного движения между датчиками или секциями для достижения обнаружения дефектов, номинально аксиально ориентированных.
Следующая задача изобретения - обеспечение прибора MFL с матрицей ЕМАТ, который уменьшает вероятность пропуска трещин в стенке трубы и имеет повышенную чувствительность к малым дефектам, т.е. повышение в амплитуде сигнала до 20 дБ. Еще одна задача изобретения - обеспечить матрицу ЕМАТ, которая требует существенного снижения требований к мощности импульсного генератора RF. Еще одна задача изобретения - обеспечение матрицы ЕМАТ, которая включает в себя самокалибровку передаваемых сигналов с использованием приемных катушек, ближайших к передающим катушкам. Дополнительная задача изобретения - обеспечение матрицы ЕМАТ, которая испытывает меньшее взаимное влияние между передатчиками, вызываемое окружающим акустическим кольцом.
Краткое описание чертежей
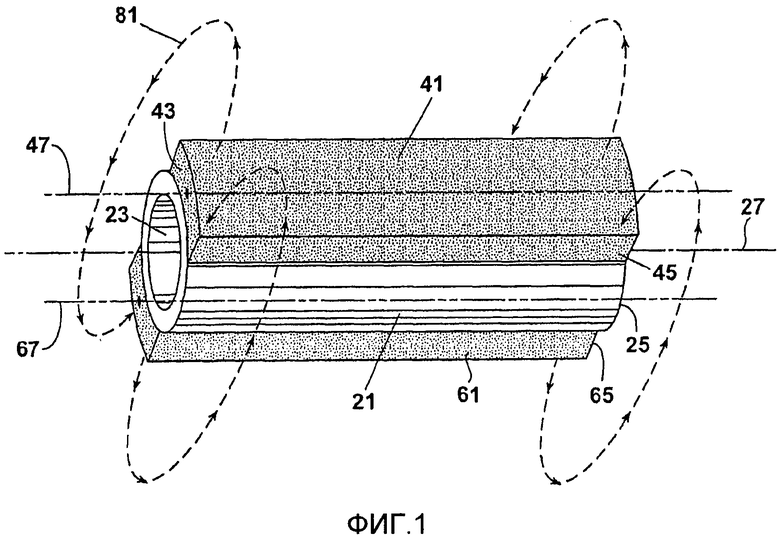
Фиг.1 - изометрический вид аксиально ориентированной конструкции намагничивающего устройства. Направление магнитного поля - окружное или поперечное к продольной оси требы.
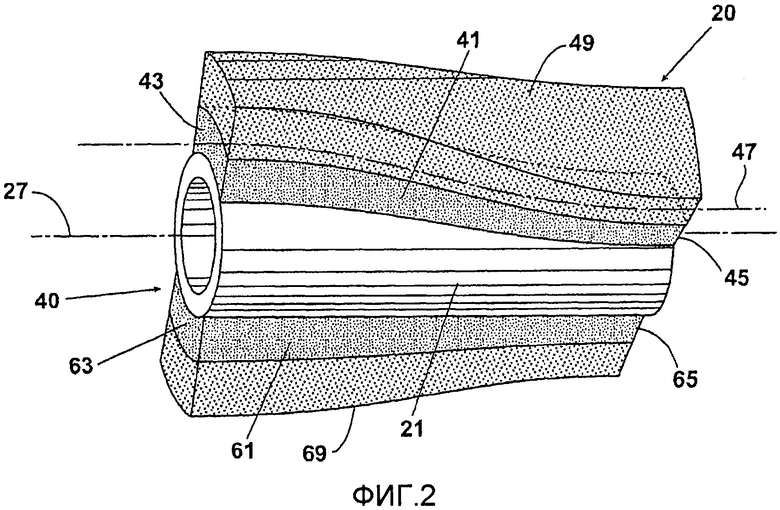
Фиг.2 - изометрический вид варианта осуществления косой сборки намагничивающего устройства согласно данному изобретению, где используется спиральная конструкция полюса магнита. Полюсные магниты повернуты или закручены по спирали приблизительно на 30° и включают в себя гибкую или удобную верхнюю поверхность.
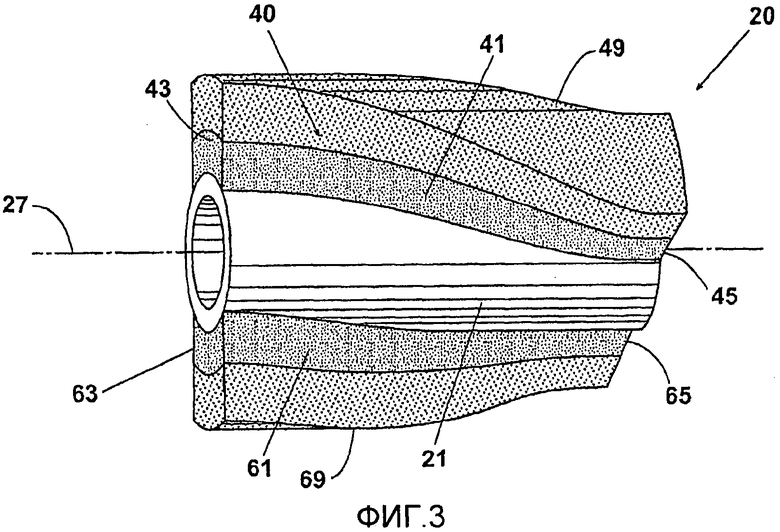
Фиг.3 - вид другого варианта осуществления косой сборки намагничивающего устройства, в которой полюсные магниты повернуты примерно на 60°.
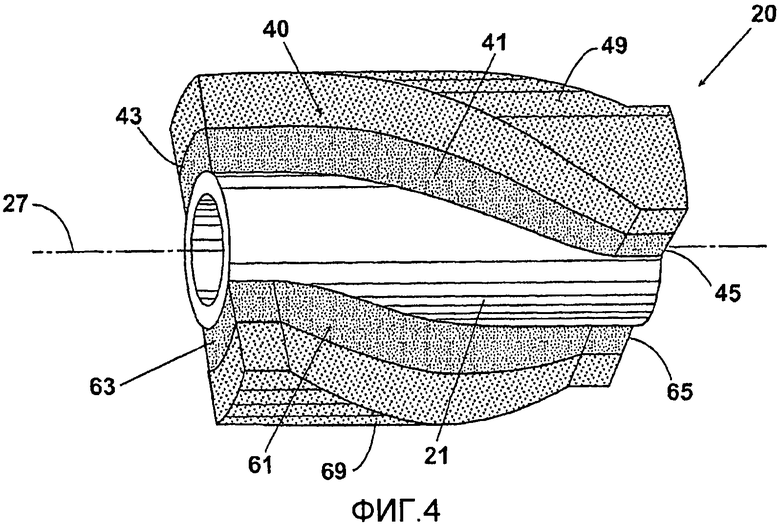
Фиг.4 - вид другого варианта осуществления косой сборки намагничивающего устройства, в которой полюсные магниты повернуты примерно на 90°.
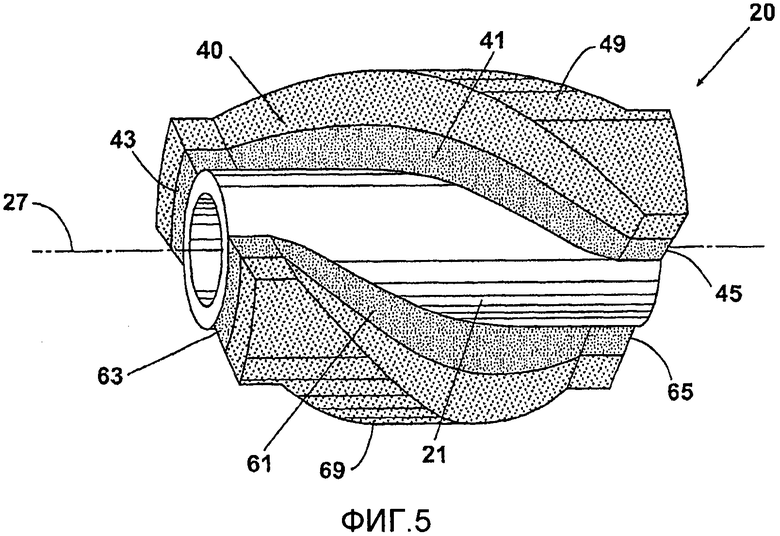
Фиг.5 - вид еще одного варианта осуществления косой сборки намагничивающего устройства, в которой полюсные магниты повернуты примерно на 120°.
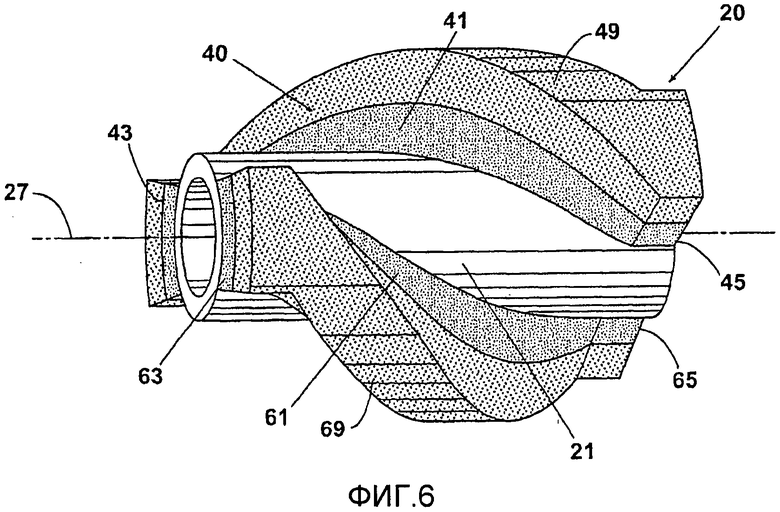
Фиг.6 - вид еще одного варианта осуществления косой сборки намагничивающего устройства, в которой полюсные магниты повернуты примерно на 150°.
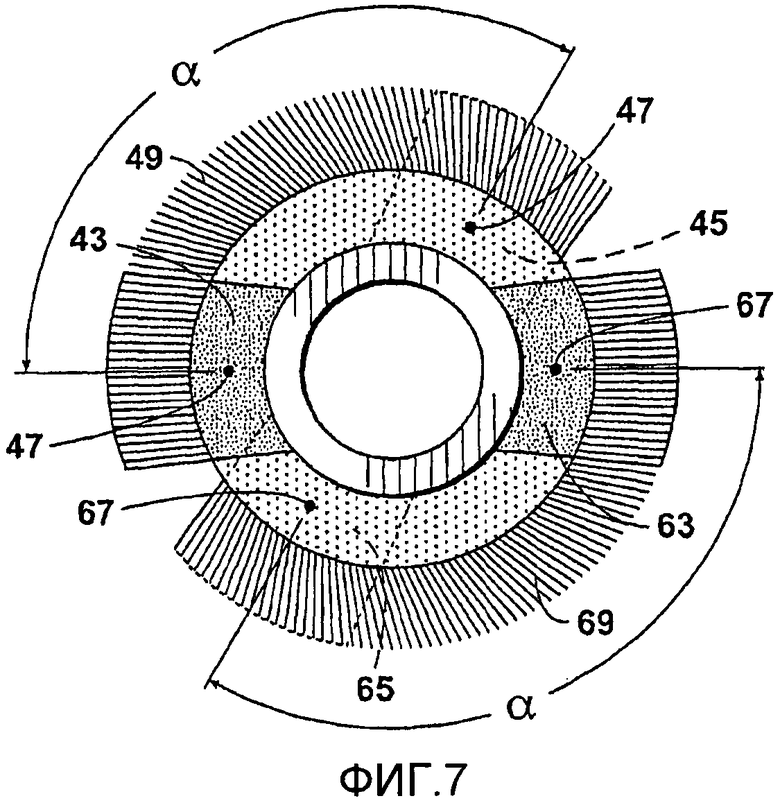
Фиг.7 - вид с торца другого варианта осуществления косой сборки намагничивающего устройства, иллюстрирующий взаимоотношение двух концов спиральных или повернутых полюсных магнитов. В данном примере полюсные магниты повернуты примерно на 135°. Удобная верхняя поверхность каждого полюсного магнита включает в себя щетинистую или щеточную поверхность.
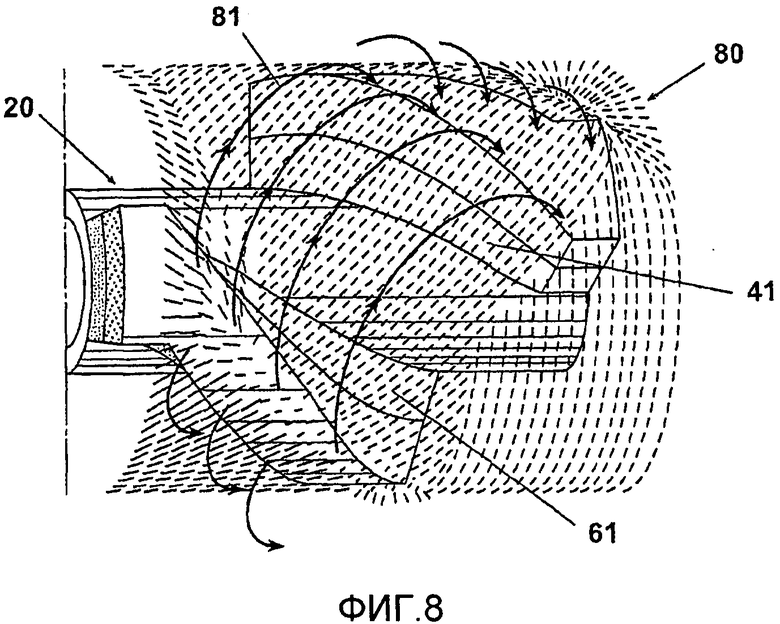
Фиг.8 иллюстрирует поле, происходящее от косой компоновки намагничивающего устройства. Направление поля диагонально или наклонно к продольной оси трубы.
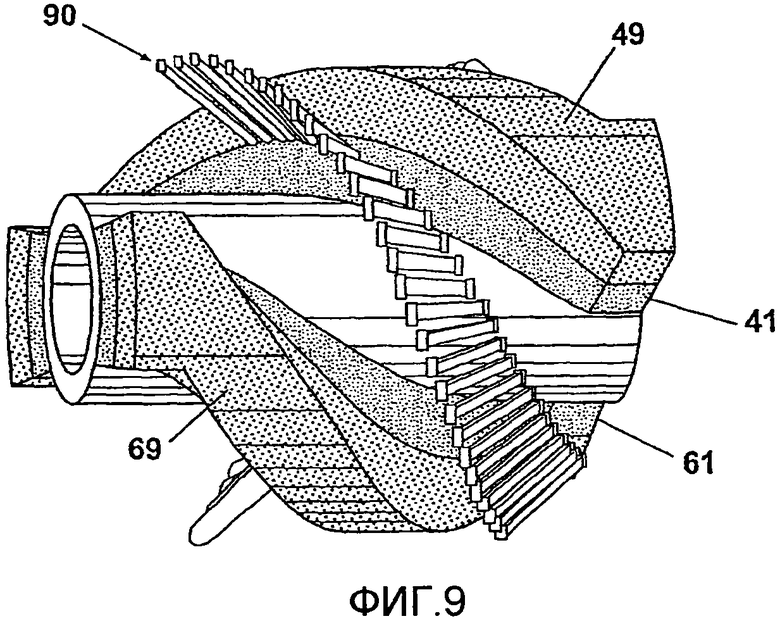
Фиг.9 - вид варианта осуществления косой сборки намагничивающего устройства, включающей в себя винтообразную матрицу датчиков, установленную от одного конца намагничивающего устройства до другого, которая обеспечивает полное покрытие внутренней поверхности стенки трубы и содержит в себе степень перекрытия, чтобы приспособиться к любому повороту прибора, который может иметь место.
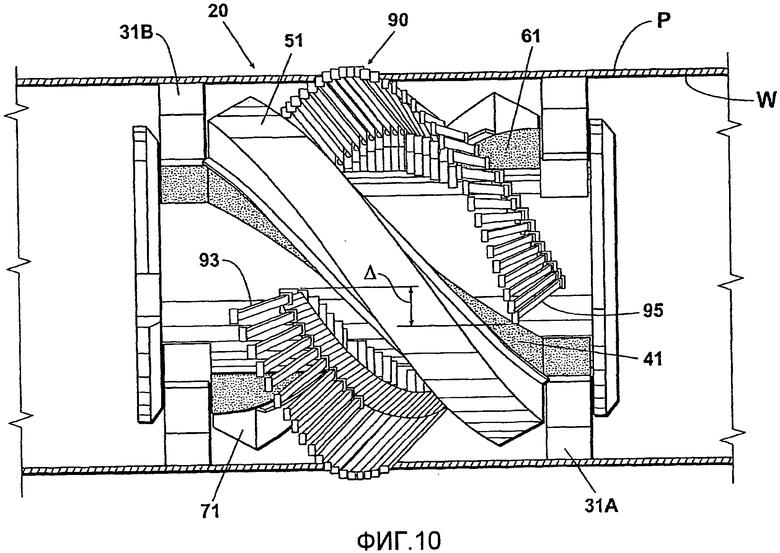
Фиг.10 - вид косой сборки намагничивающего устройства по фиг.8, заключенного в отрезок трубы.
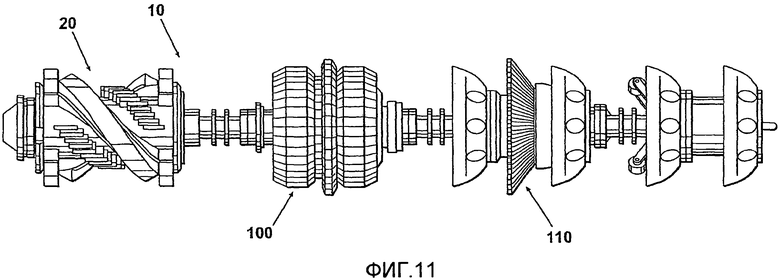
Фиг.11 - вид линейного прибора контроля, который включает в себя косую сборку намагничивающего устройства, аксиальное намагничивающее устройство и секцию восприятия деформации.
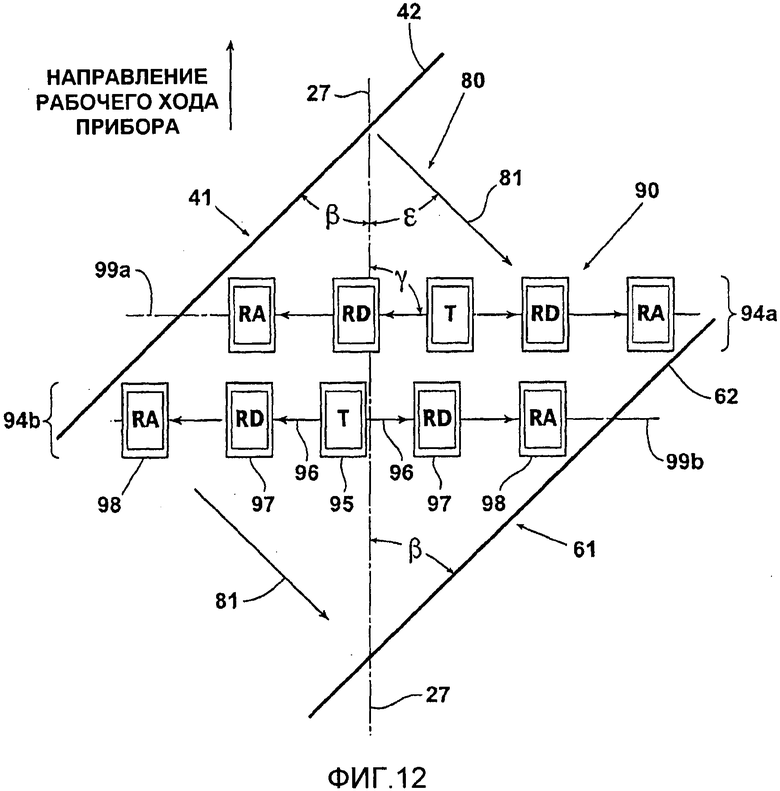
Фиг.12 - схематичная иллюстрация одной стороны матрицы датчиков, включающей в себя две линейки или комплекта сенсорных катушек ЕМАТ, расположенных между двумя наклонно ориентированными полюсными магнитами. Каждый комплект сенсорных катушек включает в себя две пары приемных катушек и передающую катушку, расположенную между парами приемных катушек. Комплекты выровнены перпендикулярно центральной продольной оси линейного прибора контроля (и, следовательно, перпендикулярно центральной продольной оси исследуемого трубчатого элемента), и каждая катушка в комплекте имеет общую центральную линию с другими катушками комплекта.
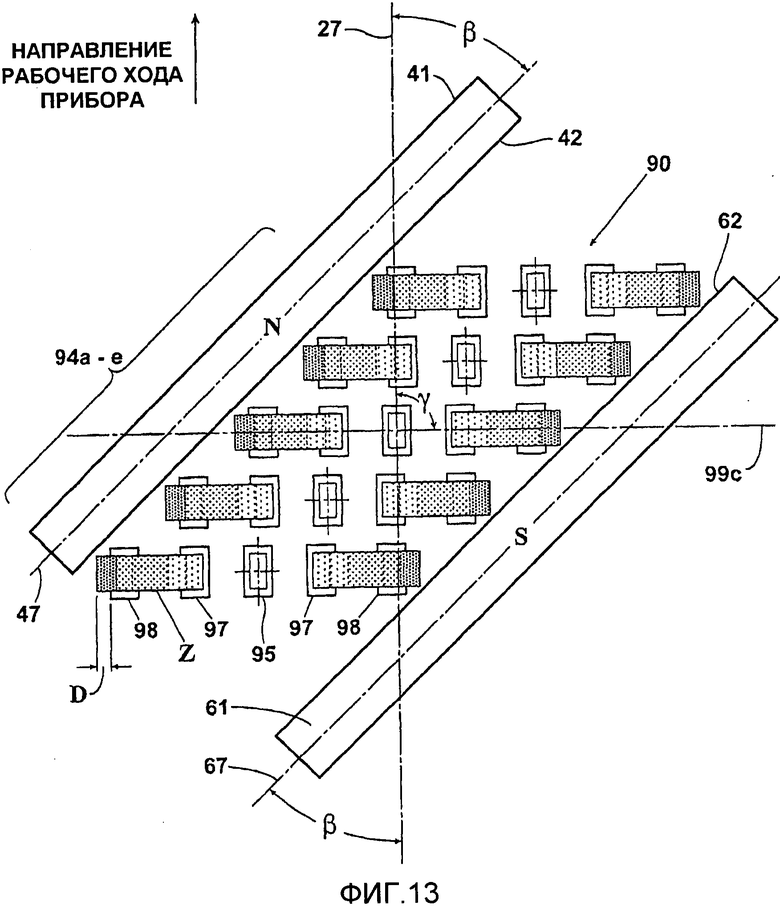
Фиг.13 - вид одной стороны матрицы датчиков, имеющей компоновку сенсорной катушки ЕМАТ по фиг.12, применяемой в трубчатом элементе диаметром 24 дюйма.
Подробное описание предпочтительного варианта осуществления
Предпочтительные варианты осуществления прибора рассеяния магнитного потока (MFL) согласно данному изобретению будут описаны далее со ссылками на чертежи и следующие элементы, проиллюстрированные на чертежах:
10 Линейный прибор контроля
20 Прибор MFL/косое намагничивающее устройство
21 Цилиндрический корпус прибора
23 Первый конец корпуса 21
25 Второй конец корпуса 21
27 Продольная ось корпуса 21
31 Радиальный диск
40 Магнитная цепь
41 Полюсный магнит
43 Первый конец магнита 41
45 Второй конец магнита 41
47 Продольная центральная линия магнита 41
49 Удобная верхняя поверхность
51 Щетки
61 Полюсный магнит
63 Первый конец магнита 61
65 Второй конец магнита 61
67 Продольная центральная линия магнита 61
69 Удобная верхняя поверхность
71 Щетки
80 Магнитное поле
81 Путь магнитного потока поля 80
90 Матрица датчиков
91 Первый конец матрицы 90
93 Второй конец матрицы 90
94 Линейка или комплект сенсорных катушек 95, 97 и 98
95 Передающая катушка
96 Горизонтально поляризованная поперечная волна, генерируемая катушкой 95
97 Приемная катушка RD
98 Приемная катушка RA
99 Центральная ось комплекта 94 сенсорных катушек
100 Аксиальное намагничивающее устройство
110 Секция восприятия деформации.
Обращаясь сначала к фиг.1, магнит 41 северного полюса и магнит 61 южного полюса расположены под углом приблизительно 180° друг напротив друга, на цилиндрическом корпусе 21 прибора таким образом, что соответствующая продольная центральная линия 47, 67 каждого полюсного магнита 41, 61 параллельна продольной центральной линии 27 цилиндрического корпуса 21 прибора (и, следовательно, параллельна центральной продольной оси исследуемой трубы). Хотя полюсные магниты 41, 61 отличаются от исполнений прототипа тем, что, например, каждый магнит 41, 61 продолжается по всей длине цилиндрического корпуса 21, их осевая ориентация, как проиллюстрировано здесь, является типичной для исполнений прототипа. Будучи расположены подобным образом, полюсные магниты 41, 61 генерируют круговое или поперечное магнитное поле относительно стенки трубы, как проиллюстрировано путями 81 магнитного потока, и требуется множество секций намагничивающего устройства, чтобы обеспечить полное покрытие внутренней поверхности стенки трубы.
Обращаясь теперь к фиг.2-6, косая сборка намагничивающего устройства 20 согласно изобретению включает в себя магнитную цепь 40, которая имеет два спиральных полюсных магнита 41, 61, расположенных под углом около 180° друг напротив друга на цилиндрическом корпусе 21 прибора. Каждый полюсный магнит 41, 61 продолжается между первым концом 23 и вторым концом 25 цилиндрического корпуса 21 прибора. Также могут применяться дополнительные пары спиральных полюсных магнитов 41, 61, при этом каждый спиральный полюсный магнит 41 или 61 продолжается между концами 23, 25 цилиндрического корпуса 21 прибора и удален на 360°/n от соседнего и противолежащего полюсного магнита 61, 41 («n» является равным числу применяемых полюсных магнитов 41, 61). Полюсные магниты 41, 61 предпочтительно имеют гибкую или удобную верхнюю поверхность 49, 69, соответственно, способствующую уменьшению сил трения и минимизации кинематических эффектов при перемещении косой сборки 20 намагничивающего устройства через внутренность трубы. Удобная верхняя поверхность 49, 69 также позволяет сборке 20 намагничивающего устройства в достаточной степени сжиматься, чтобы проходить по внутренним препятствиям, изгибам и сужениям в трубе, которые в противном случае могли бы повредить сборку 20 намагничивающего устройства либо замедлить или препятствовать его прохождению.
Величина поворота полюсных магнитов 41, 61 зависит от величины поворота, требуемой для достижения полного покрытия внутренней поверхности стенки трубы. Если последовательно рассмотреть фиг.2-6, то каждый из полюсных магнитов 41, 61 повернут или закручен по спирали на величину прироста, для номинального поворота приблизительно в 150 градусов (фиг.6). Будучи повернут, второй конец 45, 65 полюсного магнита 41, 61 смещен на заданный угол или заданную величину α относительно своего соответствующего первого конца 43, 63 (смотрите фиг.7). Из-за данной величины поворота α соответствующая продольная центральная линия 47, 67 каждого спирального полюсного магнита 41, 61 не параллельна центральной продольной оси 27 цилиндрического корпуса 21 прибора. Поворот полюсных магнитов 41, 61 также помогает вызвать достаточную величину вращения сборки 20 намагничивающего устройства при прохождении ее через внутренность трубы.
Фиг.8 иллюстрирует магнитное поле 80, генерируемое прототипом косой сборки 20 намагничивающего устройства, которая сконфигурирована аналогично сборке 20 намагничивающего устройства, представленному в последовательности поворотов на фиг.2-6. В отличие от линейных приборов контроля прототипа, направление магнитного поля 80 диагонально или наклонно оси трубы, а не круговое или поперечное, при этом пути 81 магнитного потока исходят из полюсов 41, 61 и идут в противоположных направлениях, достигая соответствующего полюса 61, 41. Линии 81 магнитного потока, генерируемого каждым полюсным магнитом 41, 61, направляются по пути наименьшего сопротивления: в стенку трубы и к соседнему полюсному магниту 61, 41. Угол магнитного поля 80 в целом перпендикулярен линиям 81 потока, образуемого магнитными полюсами 41, 61, и параллелен линии, образующей кратчайшее расстояние между магнитными полюсами 41, 61. Направление магнитного поля 80 в протяжениях полюсов 41, 61 может варьироваться от 30 до 60 градусов относительно оси трубы.
Обращаясь к фиг.9-10, косая сборка 20 намагничивающего устройства может включать в себя винтообразную матрицу 90 датчиков, расположенную по существу эквидистально между повернутыми полюсными магнитами 41, 61 и упорядоченную обеспечивать полное покрытие внутренней поверхности W стенки трубы Р и приспосабливаться к любому возможному повороту сборки 20 намагничивающего устройства. Отдельные датчики в матрице датчиков 90 могут быть вида, хорошо известного в данной области техники для обнаружения сигналов рассеяния магнитного потока. Матрица датчиков 90 предпочтительно тянется между первым концом 23 и вторым концом 25 цилиндрического корпуса 21 (и, следовательно, между соответствующими концами 43, 45 и 63, 45 полюсных магнитов 41, 61) и содержит степень перекрытия Δ между первым концом 91 и вторым концом 93 матрицы 90 датчиков. Удобные верхние поверхности 49, 69 полюсных магнитов 41, 61 (смотрите фиг.6) могут быть в виде щеток 51, 71. Радиальные диски 31А и 31В помогают продвигать и центрировать сборку 20 намагничивающего устройства при ее перемещении вперед в трубе Р под перепадом давления.
Окончательная конфигурация косой сборки 20 намагничивающего устройства может включать в себя любые текущие сочетания наборов данных, включая такие данные, как деформация, высокоуровневое осевое MFL, внутренняя/внешняя селективность, инерциальные данные для отображения, а также низкоуровневое или остаточное MFL. Согласно одному из предпочтительных вариантов осуществления линейного прибора 10 контроля, включающего в себя косую сборку 20 намагничивающего устройства, прибор 10 включает в себя осевое намагничивающее устройство 100 и секцию 100 восприятия деформации (смотрите фиг.11).
Обращаясь к фиг.12 и 13, матрица 90 датчиков включает в себя сенсорные катушки 95, 97 и 98 электромагнитоакустических датчиков (ЕМАТ), расположенные между противоположными краями 42, 62 наклонно ориентированных постоянных полюсных магнитов 41, 61. Сенсорные катушки 95, 97 и 98 предпочтительно расположены линейками или комплектами 94а-е сенсорных катушек, как определено соответствующей центральной осью 99а-е комплекта сенсорных катушек. Каждая центральная ось 99а-е в общем параллельна другим осям 99а-е и ориентирована под заданным углом γ относительно центральной продольной оси 27 цилиндрического корпуса 21 прибора. Комплект из комплектов сенсорных катушек (не показан), идентичный, по существу, комплектам сенсорных катушек 94а-е, расположен на противоположной наружной поверхности цилиндрического корпуса 21 прибора, примерно на 180° противоположно комплектам 94а-е сенсорных катушек.
Наклонно ориентированные полюсные магниты 41, 61 в общем случае расположены под углом β относительно центральной продольной оси 27, причем угол β отличен от угла γ. Так как линии 81 потока, генерируемого полюсными магнитами 41, 61, в целом перпендикулярны краям 42, 62 полюсных магнитов 41, 61, магнитное поле 80 повернуто под углом ε относительно центральной продольной оси 21 и, следовательно, находится под углом относительно комплектов 94а-с сенсорных катушек. Согласно предпочтительному варианту осуществления угол γ составляет приблизительно 90°, угол β - около 45°, угол ε - около 45°.
Размещение комплектов 94а-е сенсорных катушек перпендикулярно центральной продольной оси 27 цилиндрического корпуса 21 прибора (и, следовательно, перпендикулярно оси трубы) позволяет матрице 90 датчиков обнаруживать особенности (дефекты) как в аксиальном, так и в круговом направлении. Передающие катушки 95 генерируют SH волны 96, которые перемещаются по окружности вокруг трубы и падают под нормальным углом (перпендикулярно) к аксиально ориентированным трещинам. Размещение комплектов 94а-е сенсорных катушек параллельно центральной продольной оси 27 цилиндрического корпуса 21 прибора (и, следовательно, перпендикулярно оси трубы) позволяет матрице 90 датчиков обнаруживать особенности (дефекты) в круговом направлении. Горизонтально поляризованные поперечные волны 96 передаются вдоль стенки трубы в осевом направлении таким образом, что обнаруживаются отражения от поперечных трещин, таких как трещины в круговых сварных швах. В отличие от ориентации приемников в приборах ЕМАТ прототипа приемные катушки 97, 98 не нужно смещать диагонально относительно или поворачивать к передающей катушке 95, чтобы получить преимущества магнитного поля 80, повернутого относительно сенсорных катушек 95, 97 и 98 ЕМАТ.
Сенсорные катушки 95, 97 и 98 могут быть установлены на подходящий механизм, такой как подпружиненные подушки (не показаны), которые удерживают катушки 95, 97 и 98 в непосредственной близости к внутреннему диаметру трубы. Передающие катушки 95 индуктируют направленные SH волны 96 в двух круговых направлениях вокруг трубы. Приемные катушки 97 обнаруживают отражения от трещин от коррозии напряжением и служат в качестве калибровочных приемников. Приемные катушки 98 обнаруживают направленные SH волны 96, распространяющиеся от передающих катушек 95 в круговом направлении. Отличительные особенности этих улавливаемых сигналов, такие как амплитуда и время поступления, могут быть использованы для обнаружения особенностей (дефектов), таких как нарушение покрытия, коррозия и SCC.
Приемные катушки 97, 98 расположены на заданном расстоянии от передающей катушки 95, так что ответные сигналы обнаруживаются приемными катушками 97, 98, при этом начальный импульс электронного возбуждения не влияет неблагоприятно на них. Каждая передающая катушка 95 в комплекте 94а-е сгруппирована с двумя приемными катушками 97, 98 на каждой стороне. Матрица 90 датчиков предпочтительно включает в себя требуемое количество передающих катушек 95 и приемных катушек 97, 98 для обеспечения перекрывающего покрытия обнаружения SCC и нарушений покрытия. В одном предпочтительном варианте осуществления, каждая из двух матриц 90 датчиков, расположенных друг напротив друга и предназначенных для использования в трубе диаметром 24 дюйма, включает в себя пять передающих катушек 95 и всего 20 приемных катушек 97, 98.
Каждая передающая катушка 95 при включении заставляет направленные SCC волны 96 распространяться как вправо, так и влево от катушки 95 вокруг окружности трубы. Приемные катушки 97, 98, ближайшие к активной передающей катушке 95, сначала стробируются во времени (отпираются импульсами) для приема выходящих волн 96, а затем стробируются на более длительную заданную временную задержку, предпочтительно порядка 50 и 90 микросекунд для 24-дюймовой трубы, чтобы обнаружить отражения от SCC. Эти отражения от искомых зон взятия замеров «Z», расположенных между приемными катушками 97 RD и заданным расстоянием «D» после приемных катушек 98 RA, чтобы максимизировать покрытие и минимизировать помехи. Сигналы отражения нормализованы, т.е. поделены выходящими сигналами, обнаружениями в приемниках 97 RD, чтобы обеспечить непрерывную калибровку отражений сигналов.
В качестве примера, если рассматривать 24-дюймовую трубу и искомое аксиальное пространство выборки в 6 мм (0,24 дюйма), частота импульсов 390 Гц даст аксиальное (осевое) разрешение в 5,1 мм (0,20 дюйма). Эта частота импульсов позволяет SH волне 96 переместиться приблизительно 4,25 раза вокруг окружности трубы, пока не будет пущен второй импульс или тональная посылка. Следовательно, остаток первого импульса будет между приемными катушками 97, 98, и поэтому не окажет воздействия на приемные катушки 97, 98, расположенные с противоположной стороны корпуса 21 прибора внутри того окружного кольца, в течение временного интервала стробирования (стробирующий импульс).
SH волны 96 все еще остаются внутри строб-импульса приемника во время третьей тональной посылки, после того, как волна 96 прошла вокруг трубы приблизительно 8,5 раза. При использовании коэффициента затухания 0,8 на 2 фута перемещения (коэффициент получен экспериментальным путем в лабораторных условиях) тональная посылка, передаваемая при полном масштабе 100%, имеет амплитуду менее 0,3 процента по прибытии на приемные катушки 97, 98, расположенные с противоположной стороны цилиндрического корпуса 21 прибора. Этим количеством шума обычно можно пренебречь по сравнению с другими источниками шума, например, термоэлектронным шумом, который может составлять до 3 процентов от полного масштаба.
Нарушение покрытия обнаруживается в искомых зонах взятия замеров «Z» между приемными катушками 97 RD и приемными катушками 98 RA, которые расположены на одной линии с передающими катушками 95. Обнаружение нарушений покрытия можно выполнить путем вычисления соотношения стробированных сигналов приемника. Соотношения, превышающие заданный порог, указывают на недостаток или нарушение покрытия на трубе в конкретной зоне 99.
В процессе исследований, проведенных изобретателями, были выявлены следующие преимущества матрицы 90 датчиков, выполненной по изобретению, по отношению к известному уровню техники:
- повышенная чувствительность к малым дефектам, т.е. повышение в амплитуде сигнала до 20 дБ;
- существенное снижение требований к мощности генератора RF импульсов;
- полное круговое покрытие контроля, что снижает вероятность пропуска трещин;
- самокалибровка передаваемых сигналов с использованием приемных катушек, ближайших к передающим катушкам; и
- меньшее взаимное влияние между передающими катушками из-за окружающего их акустического кольца.
Возможны дополнительные варианты исполнений в зависимости от диаметра трубы, с другим количеством полюсных магнитов 41, 61, сенсорных катушек 95, 97 и 98 и матриц датчиков 90. Например, для обнаружения в круговом направлении матрица датчиков 90 будет повернута под углом наклона γ относительно оси трубы, будучи при этом все равно расположена внутри углового подмагничивающего поля 80. Помимо SCC особенностей, подобных трещинам, эти конфигурации могут реагировать на такие особенности, как нарушение покрытия или потери металла. Полученная в результате система может также использоваться как система только ЕМАТ, так и в сочетании с различными другими технологиями, доступными для линейных приборов контроля, включая MFL деформации измерения с помощью каверномера или картирование, но не ограничиваясь этим.
Хотя прибор ЕМАТ, включающий в себя косое намагничивающее устройство и винтовую матрицу датчиков, был описан довольно подробно, многочисленные изменения могут быть внесены в детали конструкции и расположение компонентов без отступления от сущности и объема раскрытого изобретения. Следовательно, прибор ЕМАТ по изобретению ограничен лишь объемом прилагаемой формулы изобретения, включая весь диапазон эквивалентов каждого элемента данного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР КОНТРОЛЯ ТРУБОПРОВОДА С НАКЛОННЫМ НАМАГНИЧИВАЮЩИМ УСТРОЙСТВОМ | 2010 |
|
RU2557336C2 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНОК ТРУБОПРОВОДОВ | 2011 |
|
RU2453835C1 |
| ДАТЧИК ДЛЯ ОПРЕДЕЛЕНИЯ ВНУТРЕННЕГО И НАРУЖНОГО ДИАМЕТРОВ ДЛЯ УСТРОЙСТВА КОНТРОЛЯ РАССЕЯНИЯ МАГНИТНОГО ПОТОКА | 2005 |
|
RU2364860C2 |
| МАГНИТНАЯ СИСТЕМА | 2015 |
|
RU2620579C2 |
| Способ определения дефектов в колонне обсадных труб и устройство для его осуществления | 1980 |
|
SU1376950A3 |
| УСТРОЙСТВО ДИАГНОСТИКИ ДЕФЕКТОВ В СООРУЖЕНИЯХ ИЗ ТРУБНЫХ СТАЛЕЙ | 2015 |
|
RU2620327C1 |
| Способ и устройство двойного намагничивания для обнаружения и идентификации трещин в стальных трубопроводах | 2024 |
|
RU2838440C1 |
| НАРУЖНЫЙ СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2013 |
|
RU2539777C1 |
Прибор контроля трубопровода включает в себя два полюсных магнита, ориентированных под наклонным углом относительно центральной продольной оси корпуса прибора. Матрица наборов сенсорных катушек расположена между противоположными краями двух полюсных магнитов и ориентирована перпендикулярно центральной продольной оси. Каждый набор сенсорных катушек включает в себя передающую катушку и две противолежащие пары приемных катушек, которые стробируются для приема отражений от стенки трубчатого элемента. Так как линейка сенсорных катушек повернута относительно подмагничивающего поля, приемные катушки находятся на одной линии с передающими катушками и имеют такую же угловую ориентацию. Прибор обеспечивает улучшенную чувствительность к малым дефектам, значительное снижение требований мощности генератора импульсов, полное покрытие по окружности, самокалибровку передаваемого сигнала и меньшее взаимное влияние между передающими катушками, вызываемое акустическим кольцом вокруг. 19 з.п. ф-лы, 13 ил.
1. Матрица датчиков для контроля внутренней стенки трубчатого элемента, причем матрица датчиков содержит:
первый и второй наборы сенсорных катушек, причем упомянутые первый и второй наборы сенсорных катушек каждый включает в себя первую и вторую пару приемных катушек и передающую катушку;
при этом упомянутая передающая катушка и упомянутые первая и вторая пара приемных катушек каждая расположены параллельно друг другу и имеют общую центральную линию, причем упомянутая передающая катушка расположена между упомянутыми первой и второй парой приемных катушек;
при этом упомянутая общая центральная линия ориентирована под углом γ к центральной продольной оси прибора контроля, на котором установлен каждый упомянутый набор сенсорных катушек;
при этом прибор контроля имеет, по меньшей мере, два полюсных магнита, расположенных наклонно к центральной продольной оси прибора контроля; и
при этом упомянутые первый и второй наборы сенсорных катушек расположены на наружной поверхности прибора контроля и лежат между и, по существу, эквидистантно от противолежащих краев упомянутых, по меньшей мере, двух полюсных магнитов.
2. Матрица датчиков по п.1, в которой упомянутый угол  γ выбран так, что упомянутая общая центральная линия наклонна относительно центральной продольной оси каждого полюсного магнита в упомянутых, по меньшей мере, двух полюсных магнитах.
γ выбран так, что упомянутая общая центральная линия наклонна относительно центральной продольной оси каждого полюсного магнита в упомянутых, по меньшей мере, двух полюсных магнитах.
3. Матрица датчиков по п.1, в которой упомянутый угол γ выбран так, что упомянутая общая центральная линия, по существу, параллельна центральной продольной оси прибора для трубопровода.
4. Матрица датчиков по п.1, в которой упомянутый угол γ составляет приблизительно 90°.
5. Матрица датчиков по п.1, в которой упомянутые первый и второй наборы сенсорных катушек разнесены друг от друга примерно на 180°.
6. Матрица датчиков по п.1, в которой часть упомянутого первого набора сенсорных катушек и часть упомянутого второго набора сенсорных катушек лежат в пределах общей круговой полосы прибора контроля.
7. Матрица датчиков по п.1, в которой часть упомянутой передающей катушки в первом наборе сенсорных катушек смещена от части упомянутой передающей катушки в направлении, перпендикулярном центральной продольной оси прибора контроля.
8. Матрица датчиков по п.1, в которой упомянутая передающая катушка в, по меньшей мере, одном из упомянутых первом и втором наборах сенсорных катушек передает сигнал, причем сигнал отражается поверхностью стенки трубчатого элемента, проверяемого прибором контроля.
9. Матрица датчиков по п.8, в которой сигнал проходит заданное количество раз вокруг окружности трубчатого элемента до того, как передающие катушки передают второй сигнал.
10. Матрица датчиков по п.8, в которой, по меньшей мере, одна из упомянутой первой и второй пары приемных катушек замеряет сигнал.
11. Матрица датчиков по п.8, в которой, по меньшей мере, одна из упомянутой первой и второй пары приемных катушек замеряет отраженный сигнал.
12. Матрица датчиков по п.11, в которой отраженный сигнал является нормализованным сигналом.
13. Матрица датчиков по п.11, в которой замер происходит с заданным интервалом времени замера.
14. Матрица датчиков по п.11, в которой сигнал проходит заданное количество раз вокруг окружности трубчатого элемента до того, как по меньшей мере одна из упомянутой первой и упомянутой второй приемных катушек замеряет отраженный сигнал.
15. Матрица датчиков по п.11, в которой замер происходит в искомой зоне замера, причем искомая зона замера продолжается между первой приемной катушкой и заданным расстоянием «D» после второй приемной катушки.
16. Матрица датчиков по п.11, в которой каждая упомянутая первая и вторая пара приемных катушек отнесены относительно упомянутой передающей катушки, так что сигнал, передаваемый упомянутой передающей катушкой, не маскирует обнаружение отраженного сигнала упомянутыми первой и второй парой приемных катушек.
17. Матрица датчиков по п.1, дополнительно содержащая упомянутые первую и вторую пару приемных катушек, причем каждая включает в себя приемную катушку RD и приемную катушку RA.
18. Матрица датчиков по п.1, дополнительно содержащая, по меньшей мере, одну приемную катушку в упомянутой первой и второй паре приемных катушек, являющуюся стробированной приемной катушкой.
19. Матрица датчиков по п.1, дополнительно содержащая, по меньшей мере, одну приемную катушку в каждой упомянутой первой и второй паре приемных катушек, являющуюся калибровочной катушкой.
20. Матрица датчиков по п.1, дополнительно содержащая, по меньшей мере, один из упомянутых первого и второго наборов сенсорных катушек, способных обнаружить, по меньшей мере, одну из: аксиально ориентированной аномалии стенки и ориентированной по окружности аномалии стенки.
| US2006220640A1, 05.10.2006 | |||
| US2004217759A1, 04.11.2004 | |||
| Способ очистки нефти и нефтепродуктов от меркаптанов | 1988 |
|
SU1616959A1 |
| US5864232A, 26.01.1999 | |||
| US5115196A, 19.05.1992 | |||
| Вихретоковый преобразователь | 1985 |
|
SU1296923A1 |

