Изобретение относится к области радиолокации и может быть использовано в автоматизированных системах контроля воздушного пространства, управления воздушным движением, а также в специальных автоматизированных системах управления воздушно-космической обороны.
Известен способ (авторское свидетельство №2030759, МПК G01S 7/40, 10.03.1995) юстировки РЛС по радиоизлучению солнца или других небесных тел, требующий значительного времени для ее проведения и определенных погодных условий.
Известен способ (авторское свидетельство №2094816 по МПК G01S 7/40 от 27.10.1997), наиболее близкий по совокупности признаков и заключающийся в том, что в процессе юстировки определяют расхождения Δx, Δy между прямоугольными координатами воздушных объектов (ВО), измеряемыми двумя РЛС. Полученные величины расхождений используют для определения с помощью специальных формул ошибок юстировки (поправок) в азимут, измеряемый РЛС. При юстировке определенной РЛС вторая РЛС является вспомогательной и должна быть заранее отюстирована. Способы предусматривают отсутствие ошибок вспомогательной РЛС по азимуту и по дальности до ВО. Если юстировка вспомогательной РЛС содержит погрешности, то юстировка настраиваемой РЛС также будет содержать дополнительные ошибки, что является существенным недостатком.
Предлагаемый способ юстировки заключается в том, что используются спутниковые навигаторы, находящиеся на настраиваемых РЛС, которые точно определяют по данным со спутников координаты местонахождения РЛС. Зная точно координаты собственного местонахождения и координаты наблюдаемого ВО, измеренные несколькими РЛС и интерполированные к единому моменту времени, легко произвести расчет математически осредненных координат цели, а потом произвести корректировку юстировки используемых РЛС. На территориальной АСУ также может находиться приемник автоматического зависимого наблюдения (АЗН), принимающий от воздушных объектов координаты их текущего местонахождения. Эти координаты воздушные объекты также получают от бортового спутникового навигатора, они могут использоваться аналогично координатам, получаемым от одной РЛС.
ВО, наблюдаемые РЛС, могут быть случайными (пролетающими над территорией, контролируемой РЛС) или специально вызванными (например, вертолеты) для юстировки РЛС территориальной АСУ. Спутниковый навигатор и приемник сигналов автоматического зависимого наблюдения могут привлекаться для юстировки РЛС или быть штатными приборами, входящими в состав оборудования РЛС. В подвижных комплексах РЛС эти относительно недорогие устройства, конечно, должны входить в состав оборудования РЛС.
Технический результат и цель использования предлагаемого способа состоит в повышении точности юстировки примерно в 3 раза по сравнению с прототипом, достигаемой использованием новейших информационных технологий - спутниковых навигаторов и системы автоматического зависимого наблюдения.
Указанный технический результат и цель достигаются тем, что способ юстировки РЛС заключается в том, что измеряют координаты отражающего объекта с последующим определением систематических ошибок юстировки, с помощью спутниковых навигаторов определяют прямоугольные координаты собственных точек стояния РЛС (Xn, Yn), измеряют юстируемыми РЛС прямоугольные координаты воздушного объекта (ВО) (X0n, Y0n), принимают на АСУ с помощью радиоприемника автоматического зависимого наблюдения координаты текущего местонахождения воздушного объекта (ХАЗHn, YАЗHn), интерполируют все принятые прямоугольные координаты к единому моменту времени, математически усредняют полученные интерполированные к единому моменту времени прямоугольные координаты ВО


вычисляют корректировки для каждой из юстируемых РЛС


сравнивают вычисленные корректировки Δβn, ΔDn с разрешающей способностью каждой из юстируемых РЛС и если корректировки больше разрешающей способности одной из юстируемых РЛС, изменяют настройки данной РЛС, измерения и расчеты повторяют до тех пор, пока величина корректировок не будет меньше разрешающей способности всех юстируемых РЛС.
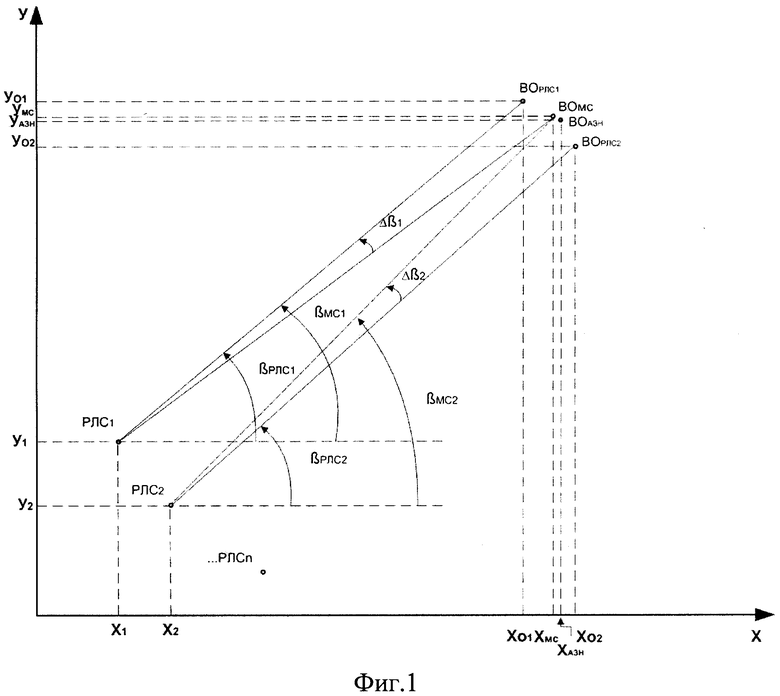
На фиг.1 схематично представлено расположение n юстируемых РЛС 1, 2,…, n и ВО, информация по которому используется для юстировки.
Юстируемые РЛС 1, 2,…, n, зная координаты собственных точек стояния в прямоугольной системе координат (x1, y1), (x2, y2),…(xn, yn), определяют координаты наблюдаемого воздушного объекта (xo1, yo1, zo1), (xo2, yo2, zo2),…(xon, yon, zon). Здесь x и y - прямоугольные координаты, z - высота ВО. Полученные координаты РЛС в виде первичной (координатной) или в виде вторичной (трассовой) информации отправляют на вышестоящий командный пункт (КП). На вышестоящем КП поступающие данные о координатах ВО приводятся к единому моменту времени Тю за счет интерполяции между двумя данными. Здесь же берутся данные, ранее сохраненные в памяти ЭВМ, о координатах ВО в интересующий нас момент времени Тю, полученные от приемника данных автоматического зависимого наблюдения (xазн, yазн, zазн), если таковой имеется на КП и если данные по АЗН выдаются от ВО.
По данным о координатах ВО в момент времени Тю вычисляется математическое среднее координаты X

координаты Y

и высота Z

Если данных от АЗН нет, то в знаменателях вышеприведенных формул вместо n +1 должно быть только n.
Математические средние величины Xмс, Yмс и Zмс являются наиболее точными координатами из всех полученных. Используя имеющиеся данные, вычисляем ошибки юстировки Δβn по азимуту каждой из РЛС
Δβn=βрлс-n-βмс-n,
где βрлс-n - угол, определенный n-й РЛС на ВО самостоятельно,
βмс-n - угол, определенный для n-й РЛС на основе математических средних координат ВО (Хмс и Yмс)

Расстояние (дальность) до наблюдаемого воздушного объекта от n-ой РЛС

Расстояние до воздушного объекта от n-й РЛС по осредненным координатам DMCмс-n

Ошибка по дальности для n-й РЛС ΔDn=Dмс-n-Dn.
Последовательное неоднократное выполнение вышеприведенных процедур позволяет с каждым шагом итерации уменьшать ошибки юстировки РЛС в территориальной АСУ и довести их до минимального предела. Пределом точности юстировки являются значения определяемые ошибками определения собственных точек стояния, скоростью воздушного объекта и временем передачи информации от РЛС к вышестоящему командному пункту, точностью интерполяции, дискретностью времени в ЭВМ на КП и рядом других малозначительных факторов. Все перечисленные погрешности могут быть сведены к минимуму и практически не влиять на точность юстировки РЛС в системе. Так, например, для юстировки можно использовать вертолет, зависший в одной точке. Тогда исчезает погрешность за счет интерполяции, т.к. координаты не меняются и приведены к единому времени, исчезает погрешность за счет фактора времени доставки информации от РЛС к КП.
Наличие в системе данных от АЗН заметно повышает точность юстировки, так как АЗН дает наиболее точные данные.
Системную юстировку следует проводить по нескольким точкам контролируемого пространства.
Основные преимущества предлагаемого способа юстировки по сравнению с существующими способами:
- юстировка нескольких РЛС в системе позволяет достичь большей точности, чем если юстировку вести в РЛС автономно;
- упрощается процесс юстировки, особенно в территориальных радиолокационных системах;
- определение корректировок производится без вывода РЛС из режима нормального функционирования;
существует возможность определения корректировок в автоматическом режиме;
- возможно использование в качестве случайных воздушных контрольных объектов;
- юстировка радиолокационной системы может проводиться в автоматическом режиме, корректируя ошибки, возникающие от ветровых нагрузок и температурных колебаний;
- позволяет юстировать источники локационной информации территориальной АСУ, размещенной на подвижных платформах (кораблях, автомобилях, самолетах);
- время определения поправок для территориальных АСУ КВП может составить единицы минут при периоде обзора 10 секунд;
- процесс юстировки может использовать итерационный процесс, когда с каждым последующим шагом повышается точность юстировки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЮСТИРОВКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2012 |
|
RU2527939C2 |
| СПОСОБ ЮСТИРОВКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1993 |
|
RU2069867C1 |
| СПОСОБ ЮСТИРОВКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1995 |
|
RU2094816C1 |
| СПОСОБ ЮСТИРОВКИ БОРТОВЫХ РАДИОЛОКАЦИОННОЙ И ОПТИКО-ЭЛЕКТРОННОЙ СТАНЦИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2757679C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОЙ ОБСТАНОВКИ С ПОМОЩЬЮ АНТЕННОЙ РЕШЕТКИ | 2013 |
|
RU2539558C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК-ОТВЕТЧИК ПО ГОРИЗОНТАЛЬНОМУ И ВЕРТИКАЛЬНОМУ УГЛУ | 2011 |
|
RU2492498C2 |
| Способ позиционирования подвижного объекта | 2017 |
|
RU2656361C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ В БОРТОВЫХ СИСТЕМАХ РАДИОВИДЕНИЯ | 2008 |
|
RU2373552C1 |
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |
Изобретение может быть использовано в автоматизированных системах управления воздушным движением. Достигаемый технический результат - повышение точности юстировки. Указанный результат достигается за счет того, что в заявленном способе измеряют координаты отражающего объекта с последующим определением систематических ошибок юстировки, с помощью спутниковых навигаторов определяют прямоугольные координаты (ПК) собственных точек стояния радиолокационных станций (РЛС) (Xn, Yn), измеряют юстируемыми РЛС ПК воздушного объекта (ВО) (XOn, YOn), принимают на автоматических системах управления (АСУ) с помощью радиоприемника автоматического зависимого наблюдения координаты текущего местонахождения ВО (XАЗHn, YАЗHn), интерполируют все принятые ПК к единому моменту времени, математически усредняют полученные интерполированные к единому моменту времени ПК ВО

Способ юстировки радиолокационных станций системы автоматического управления, заключающийся в том, что измеряют координаты отражающего объекта с последующим определением систематических ошибок юстировки, отличающийся тем, что с помощью спутниковых навигаторов определяют прямоугольные координаты собственных точек стояния РЛС (Xn, Yn), измеряют юстируемыми РЛС прямоугольные координаты воздушного объекта (ВО) (XOn, YOn), принимают на АСУ с помощью радиоприемника автоматического зависимого наблюдения координаты текущего местонахождения воздушного объекта (ХАЗHn, YАЗHn), интерполируют все принятые прямоугольные координаты к единому моменту времени, математически усредняют полученные интерполированные к единому моменту времени прямоугольные координаты ВО

здесь Хmс и Ymс - усредненные прямоугольные координаты,
n - количество юстируемых РЛС, Xo1, Хo2, Хon, Yo1, Yo2, Yon - прямоугольные координаты ВО, измеренные соответственно первой, второй и n-й РЛС, ХАЗН, YАЗН - прямоугольные координаты, полученные по АЗН-В, далее вычисляют корректировки для каждой из юстируемых РЛС по углу места

и по дальности

здесь Xn, Yn - прямоугольные координаты собственных точек стояния РЛС, сравнивают вычисленные корректировки Δβn, ΔDn с разрешающей способностью каждой из юстируемых РЛС и если корректировки больше разрешающей способности одной из юстируемых РЛС, изменяют настройки данной РЛС, измерения и расчеты повторяют до тех пор, пока величина корректировок не будет меньше разрешающей способности всех юстируемых РЛС.
| СПОСОБ ЮСТИРОВКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1995 |
|
RU2094816C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРИЧЕСКОЙ ЮСТИРОВКИ АНТЕННЫ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1999 |
|
RU2179321C2 |
| Способ приготовления водной суспензии инсектофунгисидов | 1948 |
|
SU74217A1 |
| МИШЕНЬ ДЛЯ ЮСТИРОВКИ ДВУХДИАПАЗОННОЙ БОРТОВОЙ РЛС | 2000 |
|
RU2196343C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕЛЕНГАЦИОННЫХ ОШИБОК СИСТЕМ АНТЕННА-ОБТЕКАТЕЛЬ САМОЛЕТА С УСТАНОВЛЕННОЙ НА НЕМ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2011 |
|
RU2465611C1 |
| JP 2006007940 A, 12.01.2006 | |||
| US 20080036648 A1, 14.02.2008 | |||
| Устройство для отбора жидких продуктов | 1973 |
|
SU473082A1 |
| WO 2006013136 A1, 09.02.2006 | |||

